某油缸式主动波浪补偿系统的动态特性分析
2018-01-10,,,
,,,
(武汉船用机械有限责任公司,武汉 430084)
某油缸式主动波浪补偿系统的动态特性分析
刘俊,覃刚,肖开明,任建辉
(武汉船用机械有限责任公司,武汉 430084)
基于AMSim仿真平台建立包括液压元器件、气动部件、机械传动部件,以及控制算法在内的油缸式主动波浪补偿系统的机液耦合仿真模型,分析被吊货物质量、吊重钢丝绳长度、主动波浪补偿模式开启时刻,MRU传感器误差等因素对主动波浪补偿吊机补偿系统动态特性的影响,结果表明,在控制方式和外界条件相同的条件下,而货物质量不同时,补偿响应速度和精度的差别很小;钢丝绳长度对补偿精度的影响可以忽略;从非波浪补偿模式切换至波浪补偿模式时,在升沉运动的零位置切换至主动波浪补偿模式切换更平稳快速;提高MRU传感器和气瓶压力传感器精度对补偿精度有利。
油缸;主动波浪补偿;动态特性;系统仿真
由于风浪流的作用,在深海安装作业的母船会产生升沉及横向和纵向的运动。为保证深海吊装的安全作业,需要采用主动波浪补偿技术来补偿由母船升沉、纵摇和横摇的合成运动而产生的母船定点吊载物件的升沉运动[1]。应用于深海起重机的主动升沉补偿系统一般分为油缸式补偿和绞车式补偿2种[2]。主动波浪补偿系统的补偿精度对于起重机吊装作业至关重要。考虑对应用于起重机上的油缸式主动补偿系统的动态特性影响因素进行分析。
1 工作原理

图1 油缸式主动升沉补偿原理
某起重机所采用的油缸式主动波浪系统原理见图1。本系统中恒压变量泵作为流量源,采用电比例伺服阀来实现油缸的位移控制。在泵出口设有低压蓄能器,气液缸的气体端设有高压氮气瓶。钢丝绳缠绕在绞车上,一端绕过油缸上的动滑轮以及导向滑轮与货物相连,同时在油缸上装有位置传感器。在常规模式(非波浪补偿模式)下,货物的起升和下放由绞车的收放来完成。在实际海况波浪流的作用下,母船带动起重机以及货物作升沉运动,在开启主动波浪模式时,绞车端固定,通过控制油缸活塞的位移来收放钢丝绳从而达到波浪补偿的效果,使得货物相对于海底位移尽可能小或者使得货物相对于海底匀速下放,进而实现货物的精确定位[3]。
2 影响因素分析
采用仿真分析的方法对影响油缸式主动补偿系统的动态特性的因素,建立油缸式主动波浪补偿系统的机电液耦合模型,模型包括液压元器件、气动模型、钢丝绳滑轮组件,货物及负载组件[4]。仿真模型见图2。模拟母船带动滑轮钢丝绳货物组件升沉运动,由于采用速度闭环控制油缸的位置容易产生误差累积,因此本方案采用油缸的位移反馈闭环控制控制,算法采用PID控制算法[5]。在AMSim中采用HCD库建立气液缸的模型[6],气瓶中的介质为氮气。主要仿真参数见表1。

图2 油缸式主动补偿系统仿真模型

恒压变量泵流量:2250L/min,恒压点:28.5MPa油缸缸径:250mm;气液缸缸径:480mm低压气瓶初始压力:23000kPa,容积:600L氮气瓶初始压力:19000kPa,容积:5500L钢丝绳刚度:6.079×108N/m
2.1 货物质量
对于深海作业时被吊货物质量不同,即整个系统的惯性不同,不失一般性的是系统惯性越大,系统的滞后就越大[7]。假定在实际海况下,吊机头部的升沉运动状态是幅值为3 m周期为9 s的正弦波,对货物质量分别在50、100、150、200 t时的主动波浪补偿的特性进行了分析研究。采用上文中图1所示的的控制策略。调整PID参数,得到货物的位移(相对于海底)曲线,见图3。

图3 货物质量不同时的货物位移曲线
由图3可见,当货物质量不同时,主动补偿程序采用相同的PID控制参数时,货物质量50 t和200 t时的补偿精度分别为96.1%和94.7%。说明货物质量对补偿精度的影响较小,不同货物质量,补偿控制算法中的PID控制参数可以相同。
2.2 钢丝绳长度
对于起重机上应用的油缸式波浪补偿系统的补偿性能,钢丝绳的特性是不可忽视的因素。本系统所采用钢丝绳单位长度的刚度为6.079×108N/m。在货物进入水下(钢丝绳的长度)分别为10、500、1 000、2 000、3 000 m时,所得到的货物的位移曲线见图4。
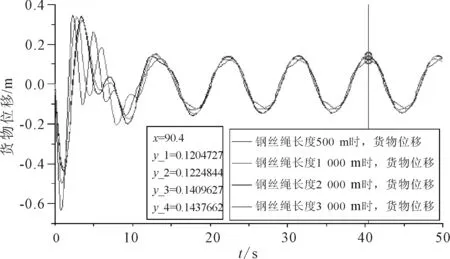
图4 钢丝绳长度不同时货物位移的变化
由图4可见,随着钢丝绳长度的增加,货物的位移稳态值基本无变化。钢丝绳长度对补偿精度的影响可以忽略。
3 实时波浪验证
3.1 不同幅度的波浪
实际海况会遇到不同幅度与频率的海浪,升沉运动的幅度周期可能是不规则的波动。已知升沉运动a是幅值为3 m周期为9 s的实际波浪运动;升沉运动b是幅值为2.5 m周期为9 s的实际波浪运动;升沉运动c是幅值为1.5 m周期为9 s的实际波浪运动。3种升沉运动的曲线见图5。在这3种升沉运动下,开启主动波浪补偿模式[8],得到货物的位移曲线见图6。

图5 不同的升沉运动曲线
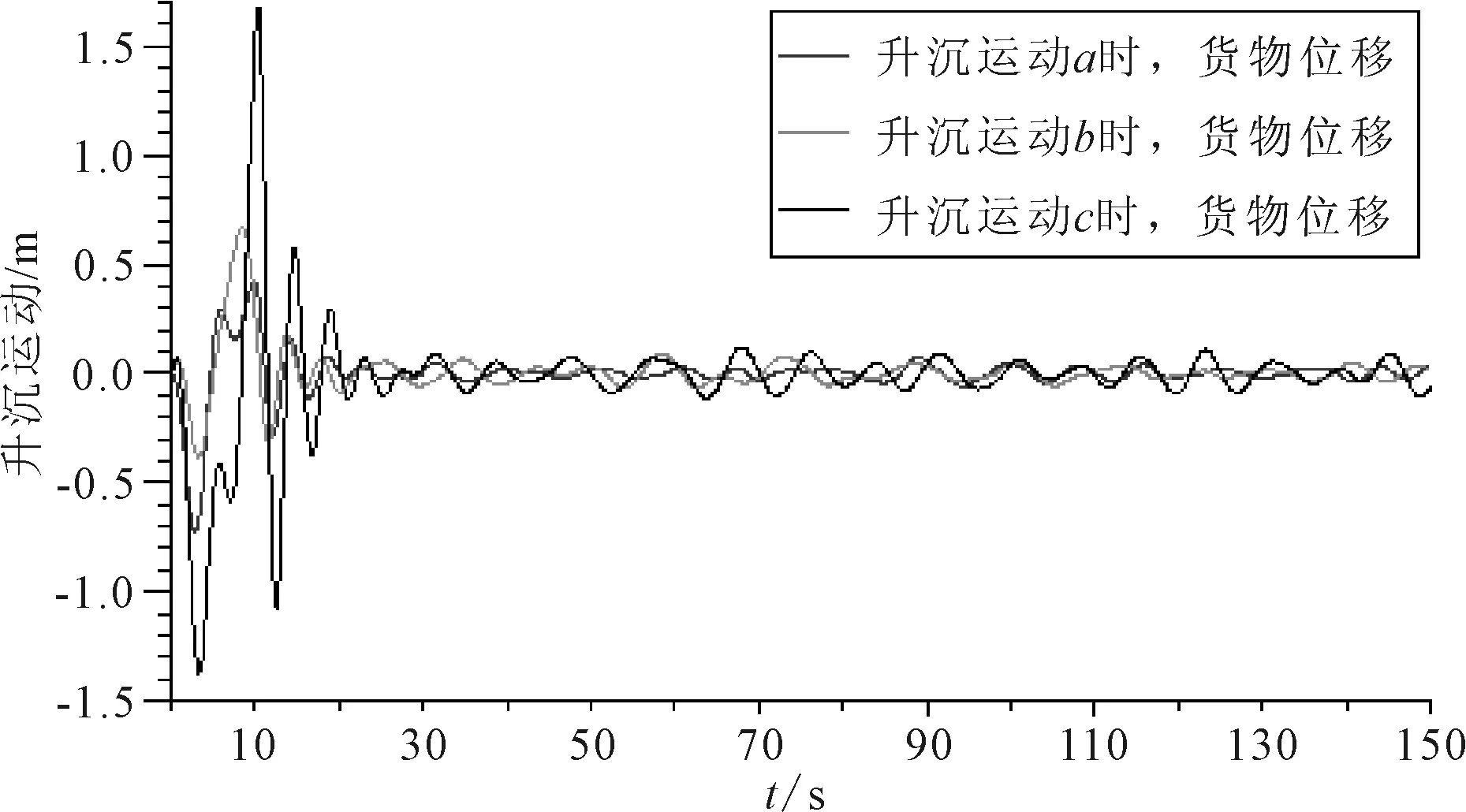
图6 不同升沉运动时的货物位移曲线
从位移曲线可以看出,对于不同幅度的升沉运动,油缸补偿系统都能很好地实现主动波浪补偿,补偿精度均在96%以上。同时与实际相符的是升沉运动幅度越小,补偿精度越高,开启瞬间的超调也越小,从而更快地趋于稳定。
3.2 不同的开启时刻
主动波浪补偿系统在实际海上工作时,升沉运动是不规则的波浪,存在波峰、波谷和零位置。从非波浪补偿模式切换至波浪补偿模式是在波峰、波谷还是零位置切换更有利于被补偿对象货物位移的稳定,是一个值得研究的问题。不同时刻进行切换的货物位移变化见图7。

图7 不同开启时刻货物位移的变化
其中货物位移a为在升沉运动的波峰开启主动波浪补偿,货物位移b为波谷开启,货物位移c为零位置开启。可见在不同时刻开启主动波浪补偿,不影响最终补偿状态,但是会影响响应时间,即从开启到最终达到稳定补偿的时间。在波谷和波峰开启,响应时间约11 s;在零位置开启,响应时间约4 s。在海况相对恶劣的情况下,从非波浪补偿模式切换至波浪补偿模式时,建议在升沉运动的零位置切换至主动波浪补偿模式,这样切换更平稳快速。
4 补偿精度分析
4.1 MRU传感器的误差
实际工作过程中,由MRU的检测型号换算成起重机吊点的生成运动[9-10]。由于现有的MRU存在5%的误差,也就是说检测到的升沉运动与实际的升沉运动之间有一定的误差。这种误差,在油缸式主动波浪补偿系统中不能忽略。MRU的误差分别为0%和5%时货物的位移变化见图8。

图8 不同的MRU误差下的货物位移变化
从图8可见,由于MRU传感器的5%的误差,导致补偿精度从零误差时的95.2%下降为92.6%。可见MRU传感器的选择至关重要,应尽可能选择误差较小的传感器,以提高补偿精度。
4.2 气瓶压力控制误差
该油缸式主动波浪补偿系统,高压蓄能器的压力的设定方法为:根据离货物最近的张力传感器测起吊货物(含吊具)的重量,根据测量的重量设置气瓶压力。由于张力传感器的测量值与实际值之间的误差,估计值±2%,最终设定气瓶压力值与实际压力值之间的误差,估计值±1 500 kPa。下面研究吊重200 t时气瓶压力的误差对补偿精度的影响。气瓶压力c为为额定压力,压力a比压力c低2%,压力b比压力c低4%,得到的货物位移曲线见图9。

图9 不同气瓶压力时货物位移曲线
由于气瓶压力传感器误差,导致气瓶压力低于目标设定压力时,货物的稳态位移降低,即补偿精度降低。实时设定气瓶压力时,可略微大于理论值,对补偿精度是有利的。
5 结论
在对油缸式主动波浪补偿系统控制性能的影响因素方面,在控制方式和外界条件相同的条件下,货物质量不同,补偿响应速度和精度的差别很小。不同质量的货物,可以采用相同的PID控制参数来实现主动控制。随着钢丝绳长度的增加,货物的位移稳态值基本无变化,钢丝绳长度对补偿精度的影响可以忽略。在强度满足要求的条件下,应该尽可能选择刚度较高的钢丝绳。
实际海浪条件下,母船做不规则升沉运动时,升沉运动幅度越小,补偿精度越高。在海况相对恶劣的情况下,从非波浪补偿模式切换至波浪补偿模式时,建议在升沉运动的零位置切换至主动波浪补偿模式,这样切换更平稳快速。
对于油缸式主动补偿系统,MRU传感器的选择至关重要,应尽可能选择误差较小的传感器来提高补偿精度。由于气瓶压力传感器误差,导致气瓶压力低于目标设定压力时,货物的稳态位移降低,即补偿精度降低。实时设定气瓶压力时,可略微大于理论值,以利于提高补偿精度。
[1] 陈远明,梁富琳.波浪补偿系统智能控制器设计[J].船海工程,2016(1):123-128.
[2] 王学军,张韵韵.复合油缸波浪补偿装置[J].船舶工程,2013(2):51-53.
[3] 刘绍兴,周江涛,杨清璞.船用液压起重机加装波浪补偿装置的研究[J].机电设备,1999(5):21-25.
[4] 张兴茂.主动式波浪补偿系统时滞行为控制技术研究[D].长沙:国防科技大学,2010.
[5] 何平.主动式波浪补偿控制系统研究[D].长沙:国防科学技术大学,2007.
[6] 李成功,和彦淼.液压系统建模与仿真分析[M].北京:航空工业出版社,2008.
[7] 王春行,徐渌,王益群.液压控制系统[M].北京:机械工业出版社,2008.
[8] 蔡东伟,刘荣华,张作礼,等.一种主动升沉波浪补偿控制系统研究[J].船舶工程,2012(2):103-106.
[9] 王莉.海上业务传感器[J].中国仪器仪表,1992(5):47-48.
[10] 阳凡林,卢秀山,李家彪,等.多波束勘测运动传感器偏移改正方法[J].武汉大学学报.2010(7):816-820.
Study on Dynamic Characteristic of the Hydraulic Cylinder Type of Active Heave Compensation System
LIUJun,QINGang,XIAOKai-ming,RENJian-hui
(Wuhan Marine Machinery Plant Co. Ltd., Wuhan 430084, China)
The mechanical, electric and hydraulic coupling simulation model of hydraulic cylinder active heave compensation system was set up, including hydraulic components, pneumatic components, mechanical transmission components and control arithmetic. Based on this simulation model, the influence factors were studied including the load mass and rope length. The compensation characteristic of hydraulic cylinder active heave compensation system was studied in the real wave condition, and the principle of the time to switch to active heave compensation model was found. The influences of the error of MRU sense and the error of nitrogen pressure control to compensation precision were studied. This item can help to improve the control characteristic of hydraulic cylinder active heave compensation System.
hydraulic cylinder; active heave compensation; dynamic characteristic; system simulation
U664.4
A
1671-7953(2017)06-0155-04
10.3963/j.issn.1671-7953.2017.06.035
2017-01-09
2017-02-14
工业和信息化部项目(工信部联装[2012]533号)
刘俊(1987—),男,硕士,工程师
研究方向:CEA仿真