船用起重机减摇装置设计
2018-01-10,,,,,
,,,,,
(大连海事大学 轮机工程学院,辽宁 大连 116026)
船用起重机减摇装置设计
韩广冬,张桐,陈海泉,张金男,孙玉清,王生海
(大连海事大学 轮机工程学院,辽宁 大连 116026)
针对船用起重机的吊重摇摆抑制问题,设计一种船用起重机吊盘减摇装置,利用2根恒张力减摇索和主吊索在吊盘处形成相对稳定的力的三角形,同时吊盘将减小吊绳及吊重的摆幅。建立吊重在有无吊盘下的运动学方程,在Matlab/Simulink软件中对模型进行仿真分析,对比分析在船舶不同的横、纵摇运动角度下有无减摇装置时吊重的摇摆,结果表明,有吊盘的情况下,吊重的摆角可减小70%左右,通过搭建试验平台进行试验,得到有吊盘时,吊重的摆角可减小60.7%左右,验证了减摇装置的有效性。
船用起重机;减摇装置;运动学模型;Matlab/Simulink软件
船用起重机在海上作业过程中由于受到风、浪、流等外部环境和自身操纵的影响,起重机吊重会产生摆动,从而影响船用起重机工作的高效性和安全性。因此,对船用起重机吊重系统进行动力学建模并进行吊重的摆动控制,这对船用起重机作业的安全高效具有非常重要的意义[1]。在起重机系统的动力学研究中,将船体对吊重的直接作用直接简化为吊臂头上吊绳吊点处的简谐激励,这种模型实际上是将吊重作为一个空间摆[2-4],研究表明即使是吊点的平面运动,在一定条件下也会使吊重产生空间摇摆,甚至产生混沌运动[5-6]。还有将船舶运动和吊重的摆动进行耦合分析,建立多体动力学模型[7-9]。在起重机吊重的减摇控制方面,现有的减摇方法在理论上具有一定的效果[10-14],但是机构和控制都非常复杂,并没有实际实验,存在很大的局限性。
为了解决现有船用起重机作业时吊重的摆动问题,同时克服现有减摇装置存在的不足,提出一种吊盘式机械减摇装置。
1 吊盘装置的原理与结构
设置船用起重机吊盘式减摇装置,通过吊盘阻碍吊物的单摆运动,等同于减小吊物单摆摆长,同时利用2根恒张力减摇索和主吊索在吊盘处形成相对稳定的力的三角形,从而减小摆动幅度。吊盘减摇装置试验台结构见图1。
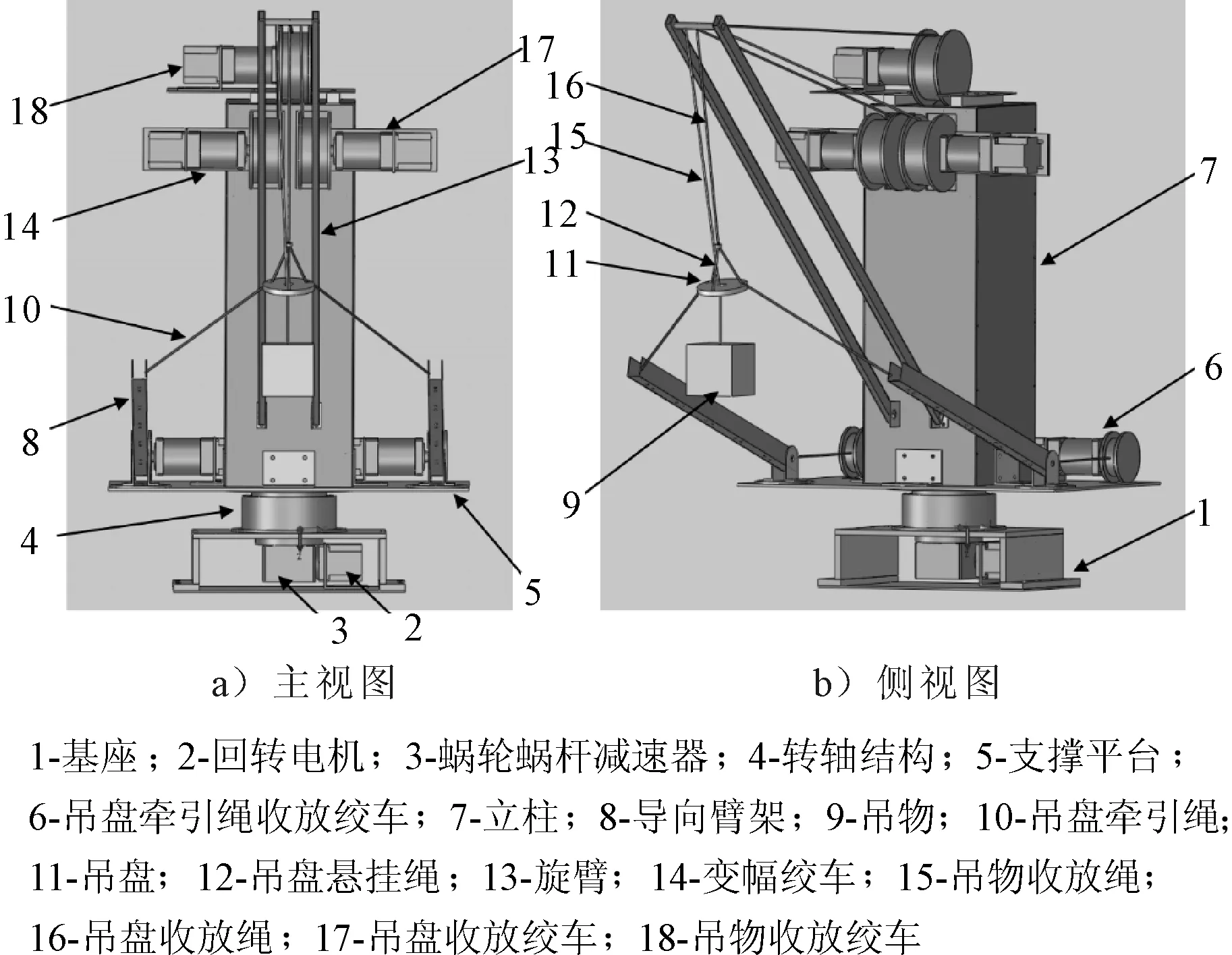
图1 吊盘减摇装置模型结构
2 起重机吊重的动力学模型
实际上,起重机本身就存在刚体与弹性体相互耦合作用。另外,起重机的运动还受到船体与风、浪、流等载荷的相互耦合作用,具有很强的非线性特征。考虑通过2减摇绳DE、DF和主吊索DB形成一个相对稳定的力的三角形(见图2所示),起到对吊重的减摇效果。
将船体视为一个激励平台,进行横摇和纵摇。做如下假设:吊重视为质点,吊绳质量与吊重相比可忽略不计;吊绳无弹性形变;船用起重机的吊臂视为刚体,忽略弹性形变;船体在规则波上运动。
根据以上假设和吊盘装置的原理,得到所研究起重机吊盘式减摇系统的模型,如图2所示。

图2 船用起重机吊盘式减摇系统模型
对图2中各参考系坐标系的定义如下:(O0-X0Y0Z0)为大地惯性坐标系,(O1-X1Y1Z1)为定位在船体上的船体坐标系,初始(O1-X1Y1Z1)坐标系和大地惯性坐标系(O0-X0Y0Z0)重合,船舶6自由度坐标曲线受到波浪激励运动,(O2-X2Y2Z2)为定位在底座上的坐标系原点O2为起重机基座与船体的交点,转盘绕Z2轴回转,其中p点位于底座坐标系(O2-X2Y2Z2)中并与O2点重合,γ为加入吊盘后主吊绳与Z轴所成的初始角度。
船用起重机吊臂吊点的运动主要由回转盘的回转、吊臂的变幅以及船体的运动来决定。通过坐标系转换,将起重机底座上的坐标系在惯性坐标系(O0-X0Y0Z0)中进行表示。
令mPn为坐标系(On-XnYnZn)的原点On在坐标系(Om-XmYmZm)中的位置向量,则
0P1=[0 0 0]T
(1)
1P2=[x2sy2sz2s+h2]T
(2)
根据机器人学的相关理论可得到坐标系(On+1-Xn+1Yn+1Zn+1)相对于坐标系(On-XnYnZn)的旋转矩阵为:
(3)
式中,θn+1x,θn+1y分别为坐标系(On+1-Xn+1Yn+1Zn+1)相对于坐标系(On-XnYnZn)在x,y轴方向旋转的角度。
起重机在船体坐标系中的位置1P2为
1P2=[0 3.5 1.5]T
(4)
起重机坐标系(O2-X2Y2Z2)的原点O2在惯性坐标系(O0-X0Y0Z0)的位置为:
(5)
利用0P2的坐标来表示起重机B点、E点和F点的坐标。
根据笛卡尔矢量形式对吊盘和吊重进行受力分析。
1)对吊盘进行静力学分析。
(6)
2)吊重运动学分析(有吊盘)。
(7)
3)吊重运动学分析(无吊盘)。
(8)
式中:F1为2根恒张力牵引绳上的力;F2为起重机主吊索上的力。
3 吊重系统运动学仿真分析
为了验证起重机吊盘减摇装置的可行性,根据上面建立的吊重系统运动学方程(6)~(8),在吊重质量为50 kg,起重机底座高度位0.2 m,吊臂(lab)长度为1.5 m,变幅角度α为45°,lbd长度为1.5 m,ldh长度为0.3 m,lce=lif=0.5 m,β=30°的情况下,船舶摇摆角度分别为横摇13°-纵摇6°、横摇15°-纵摇8°,利用Simulink对有无吊盘时重物的运动进行仿真分析,见图3。
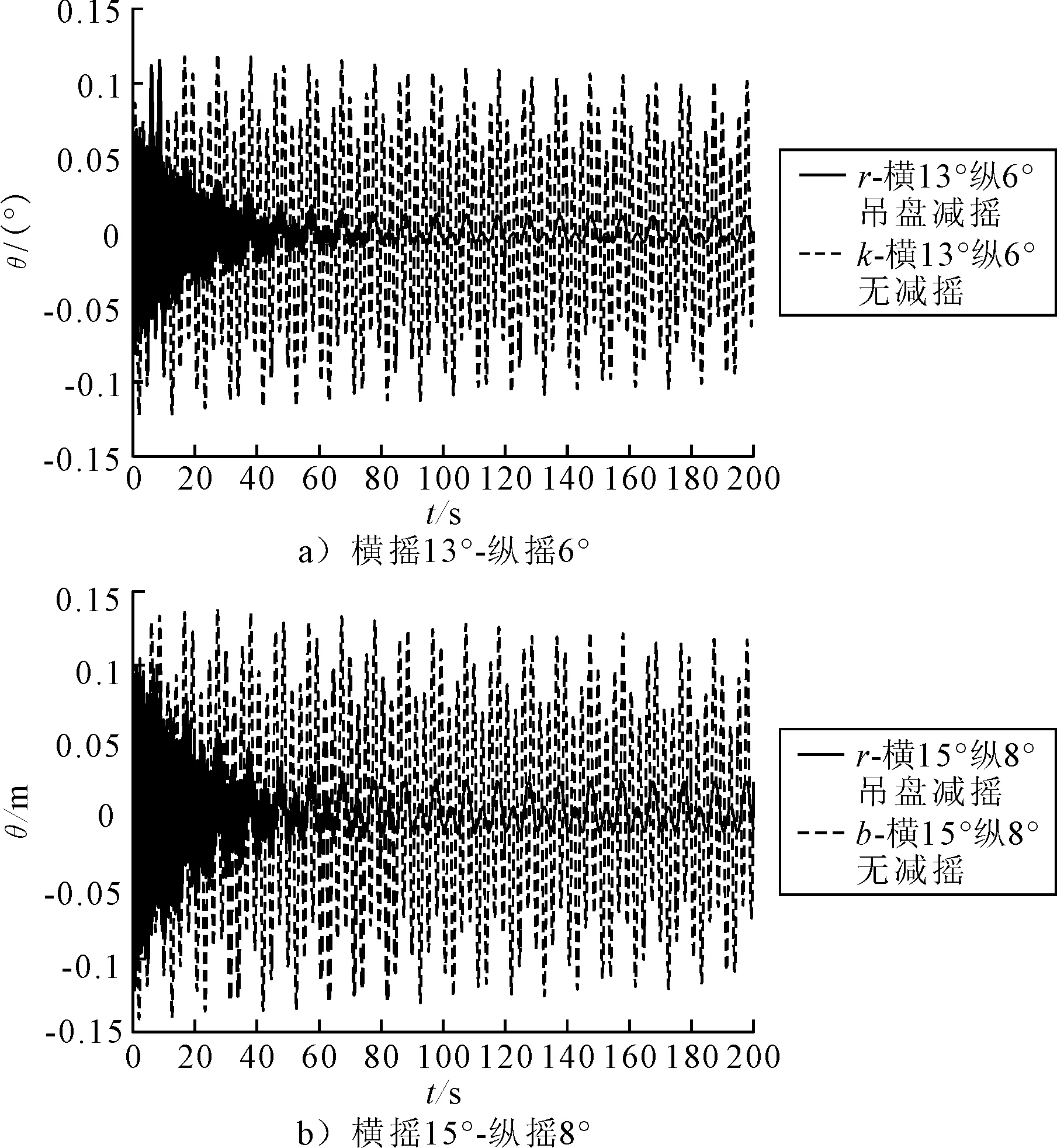
图3 吊重面内摆幅变化
由图3可见,在船舶横摇13°-纵摇6°的情况下,没有减摇装置时,吊重最大面内摆幅0.36 m;安装减摇装置后,吊重最大面内摆幅为0.05 m,减摇幅度为86.1%。在船舶横摇15°-纵摇8°的情况下,没有减摇装置时,吊重的最大面内摆幅为0.37 m,安装吊盘减摇装置后,吊重的最大面内摆幅为0.06 m,减摇幅度为83.8%。

图4 吊重面外摆幅变化
从图4可见,在船舶横摇13°-纵摇6°的情况下,没有减摇装置时,面外最大摆幅0.126 m;安装吊盘减摇装置后,吊重最大面外摆幅0.05 m,减摇幅度为60.32%。在船舶横摇15°-纵摇8°的情况下,没有减摇装置时,面外最大摆幅0.143 m;安装吊盘减摇装置后,吊重的最大面外摆幅为0.051 m,减摇幅度为64.34%。
4 试台搭建及试验
仿真结果表明,吊盘减摇装置可行。为了验证吊盘式减摇装置的有效性,利用2自由度摇摆平台和起重机缩比样机搭建的试验平台进行试验验证,试验台如图5所示。其中2自由度摇摆平台可以实现船舶的横摇和纵摇,同时摇摆角度可调,试验缩比样机按照某航标船起重机进行缩放得到。
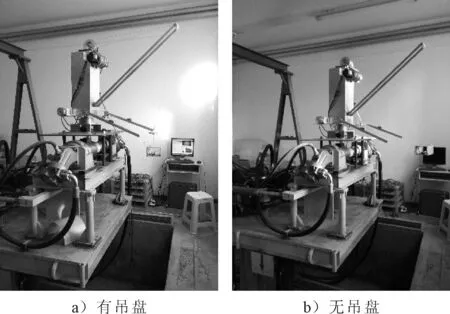
图5 试验平台
在与仿真条件相近的情况下,摇摆平台的摇摆角度分别为横摇11°-纵摇5°、横摇13°-纵摇6°、横摇15°-纵摇8°,试验结果见图6、7。

图6 吊重面内摆幅试验结果
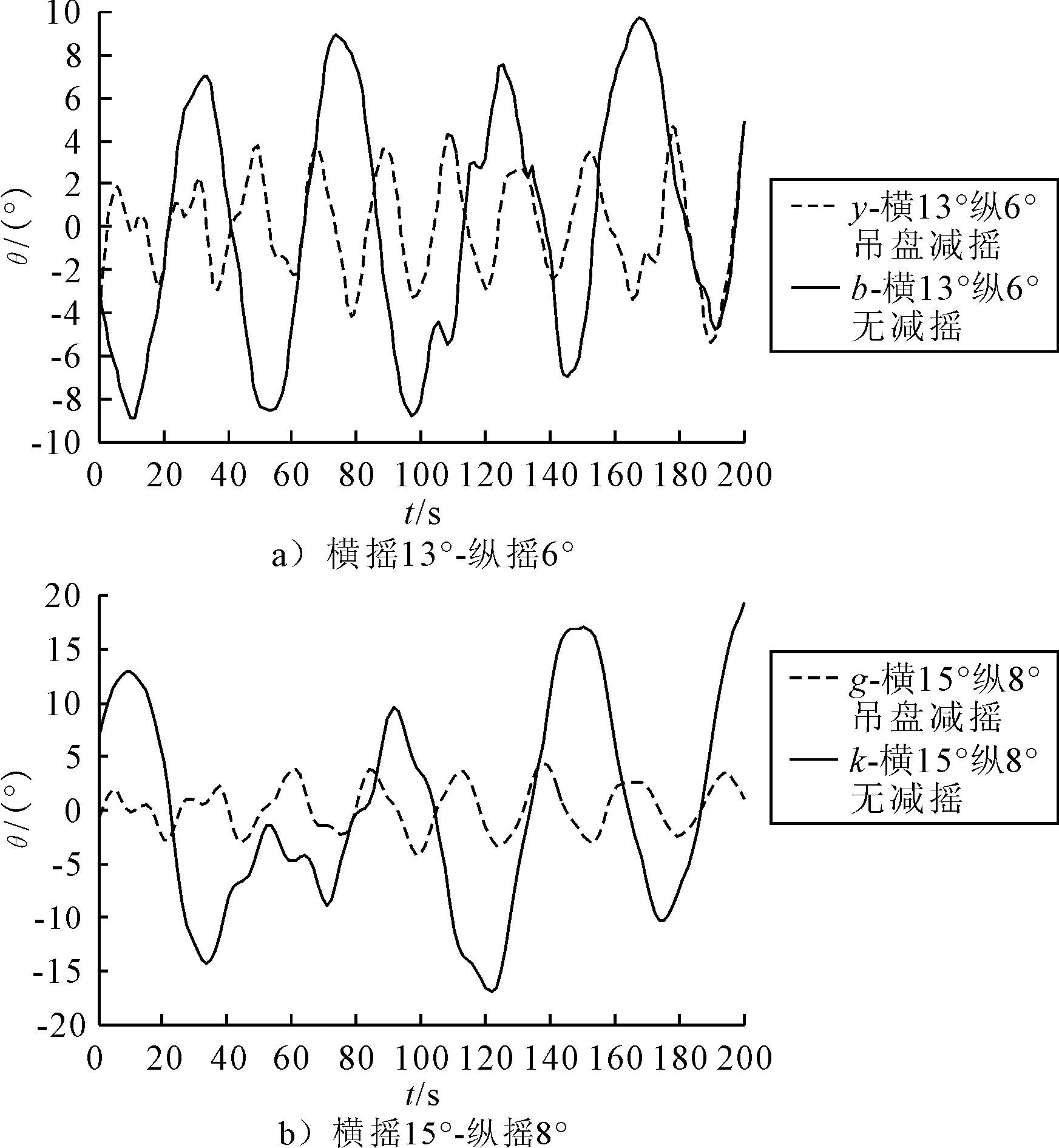
图7 吊重面外摆幅试验结果
由图6可见,在摇摆平台横摇13°-纵摇6°的情况下进行试验,没有减摇装置时,吊重的最大面内摆幅为14.3°;安装吊盘减摇装置后,吊重的最大面内摆幅为5.2°,减摇幅度为63.64%。在摇摆平台横摇15°-纵摇8°的情况下进行试验,没有减摇装置时,吊重的最大面内摆幅为18.2°;安装吊盘减摇装置后,吊重的最大面内摆幅为8.3°,减摇幅度为54.4%。
由图7可见,在摇摆平台横摇13°-纵摇6°的情况下进行试验,没有减摇装置时,面外最大摆幅为9.8°;安装吊盘减摇装置后,吊重的最大面外摆幅为4.13°,减摇幅度为57.86%。在摇摆平台横摇15°-纵摇8°的情况下进行试验,没有减摇装置时,面外最大摆幅为16.3°;安装吊盘减摇装置后,吊重的最大面外摆幅为8.2°,减摇幅度为49.7%。
5 结论
所设计的船用起重机吊盘式减摇装置,在抑制吊重摇摆方面效果明显,有利于提升起重机的作业能力和操作的安全性。但是在吊盘处形成的力的三角形是不稳定的,这样对减摇装置的效果有一定的影响,在模型设计方面还应进行优化和改进。
[1] 王学林,尤心一,胡于进.规则波作用下起重船吊重的动力学分析[J].中国机械工程,2010(9):1077-1082.
[2] HENRY R J, MASOUD Z N, NAYFEH A H, et al. Cargo pendulation reduction of ship-mounted cranes via boom-luff angle actuation[J]. Journal of Vibration and Control,2001,7(8):1253-1264.
[3] CHIN C, NAYFEH A H, ABDEL-RAHMAN E. Nonlinear dynamics of a boom crane[J]. Journal of Vibration and Control,2001,7(2):199-220.
[4] CHIN C M, NAYFEH A H. Dynamics and control of ship-mounted cranes[J]. Journal of Vibration and Control,2001,7(6):891-904.
[5] ELLERMANN K, KREUZER E, MARKIEWICZ M. Nonlinear dynamics in the motion of a floating cranes[J]. Multibody System Dynamics,2003,9(4):377-387.
[6] PARK KP, CHA JR, LEE KY, et al. Modeling of Multi-Boom Floating Crane for Lifting Analysis of Offshore Wind Turbine[J]. Transactions of the Korean Society of Mechanical Engineers A,2011,35:115-120.
[7] MILES J W, Stability of force oscillations of a spherical pendulum[J]. Journal of the Acoustical Society of America,1962,20(1):21-32.
[8] MILES J W, Resonant motion of a spherical pendulum[J]. Physica D Nonlinear Phenomena,1984,11(3):309-323.
[9] PATEL M, BROWN D, WITZ J A. Operability analysis for a manual crane vessel[J]. Transaction of the Royal Institute of Naval Architects,1987,129:103-113.
[10] Jang Jae Hoon, Kwon Sung-Ha, Jeung Eun Tae. Pendulation reduction on ship-mounted container crane via T-S fuzzy model[J]. J.Cent.South Univ.,2012(19):163-167.
[11] Kimiaghalam B, Homaifar A, Sayrrodsari B. An applicaton of model predictive control for a shipboard crane[C]∥Proceedings of the 2001 American Control Conference.2001.
[12] Parker G, Graziano M, Leban F, et al. Reducing Crane Payload Swing Using A Rider Block Tagline Control System[C]∥OCEANSE 2007.2007.
[13] Raja Ismail, RMT. HaTrajectory. QP. Tracking and anti-sway control of Three-dimensional offshore boom cranes using second-order sliding modes[C]. IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, 17-20 Aug,2013:996-1001.
[14] 王阳.船用起重机防摇装置设计研究[J].舰船科学技术,2013,35(7):105-108.
Anti-swing Device Design of Ship-mounted Crane
HANGuang-dong,ZHANGTong,CHENHai-quan,ZHANGJin-nan,SUNYu-qing,WANGSheng-hai
(College of Marine Engineering, Dalian Maritime University, Dalian Liaoning 116026, China)
To suppress the swing of the payload, a kind of sling tray anti-swing device was designed, which can reduce the swing of payload by reducing the length of the lifting rope by using two constant force cables with the main cable to establish a relatively stable triangle by the sling tray. The kinematic equations of the payload were established under the condition of whether sling tray was provided, and the dynamic was carried out in Matlab/Simulink environment. The swing of the payload under different rolling and pitching angles was analyzed. The results showed that the swing reduced about 70% payload in the case of the hanging plate. It was well agreed with the experimental result, verifying the effectiveness of the anti-swing device.
ship-mounted crane; Anti-swing device; kinematics model; Matlab/Simulink software
U664.4
A
1671-7953(2017)06-0038-05
10.3963/j.issn.1671-7953.2017.06.008
2017-01-19
2017-03-20
中央高校基本科研业务费专项资助项目(3132014332,3132015025);辽宁省自然科学基金资助项目(2015020132)
韩广冬(1991—),男,硕士生
研究方向:船用起重机减摇和波浪补偿
