深吃水半潜平台运动响应分析及模型试验分析
2018-01-10,,,
,,,
(哈尔滨工程大学 船舶工程学院,哈尔滨 150001)
深吃水半潜平台运动响应分析及模型试验分析
徐祥,康庄,付森,贾五洋
(哈尔滨工程大学 船舶工程学院,哈尔滨 150001)
针对某深吃水半潜平台在实际海况下的运动响应问题,基于AQWA,对深吃水半潜平台频域和时域下的运动响应进行数值模拟,并开展半潜平台的模型试验,分析6自由度幅值响应算子(RAO)和不规则波下的运动响应。比较由2种方法获得的RAO响应曲线和极限海况下的运动幅值,证明数值方法正确,该深吃水潜平台的运动响应模拟结果满足设计要求。
深吃水半潜平台;模型试验;RAO;不规则波;运动响应
深吃水半潜式平台在传统的半潜式平台基础上延长了立柱的长度、增加了吃水。吃水的增加使下浮体远离波浪作用,在很大程度上减小了波浪激励力对下浮体的作用,对平台的垂荡响应有不错的抑制作用,与常规半潜式钻井平台相比,平台的垂荡运动将会显著减小[1-3]。另外,由于吃水较深,深吃水半潜式平台往往没有自我航行能力,平台的浮体常采用四方环形设计,这样可以更好地保证平台的稳定性。
罗勇等人提出了一种把甲板和平台立柱分离开的新型深吃水干树式半潜平台,使得平台的运动响应满足干式采油树的要求;此外,还优化了平台主尺度,在改善稳性的同时,使平台的垂荡固有周期远离了波浪能量集中范围[4]。为验证其结果的正确性,本文对该平台进行数值分析和模型试验分析。
1 模型试验
对深吃水半潜式平台进行水池模型试验,研究该平台6自由度运动响应和极限海况的水动力性能,为数值计算提供参考。该试验在哈尔滨工程大学深水池中进行,试验内容包括静水自由衰减试验,幅值响应算子(RAO)试验和平台耐波性试验等。
1.1 模型数据
模型试验时,考虑平台的设计尺度、水池尺度、造波能力,以及整个系统的耦合实验要求等因素的影响,合理地选取了1∶70的缩尺比[5]。根据深吃水半潜平台的缩尺比,可以得到深吃水半潜平台模型主尺度。该平台的主要参数以及试验模型主尺度参数属性见表1。

表1 干式半潜平台模型参数
模型浮筒和立柱由倒模技术制成,采用玻璃钢材质;桁架结构采用不锈钢管制成,试验模型见图1。

图1 深吃水半潜平台模型
在干式半潜平台模型试验中,除静水自由衰减试验部分外,RAO试验、不规则波运动响应试验均涉及到系泊系统。为达到限制平台在波浪下的二阶低频运动不能对一阶高频运动产生影响的目的, 采用水平系泊的方式,用4根相互垂直的系泊线将模型固定在水池中。4根系泊线均采用细钢绳和弹簧相结合的方法设计,通过改变锚固点的位置和钢绳的长度来改变平台的迎浪角度。
1.2 环境条件及坐标定义
该平台设计为中国南海海域作业的深吃水半潜式平台,其工作水深为1 500 m。南海的海浪谱的谱峰值大小和谱的形状都与JONSWAP谱较接近,故选择JONSWAP谱作为波浪谱。工况为百年一遇的极限海况,波浪参数见表2。

表2 海洋环境条件
试验采用的总体坐标系见图2,原点位于浮体的重心处,x轴指向船头方向为正,z轴向上为正,y轴以右手法则定义,以沿半潜式平台纵向船头方向为0°。半潜式平台的运动坐标系为Oxyz,x轴指向船头方向为正,z轴向上为正,y轴由右手法则定义,坐标系原点位于平台重心处;平台任意时刻的运动都可分解为纵荡、横荡、垂荡、横摇、纵摇和艏摇6个自由度的运动。

图2 试验坐标系
1.3 自由衰减试验
深吃水干树式半潜式平台的6个自由度中,垂直面内的3个自由度(横摇、纵摇和垂荡)存在静水回复力或力矩,在外力的作用下偏离平衡位置,但当外力停止作用后,依靠静恢复力或力矩的作用可以恢复到原来的平衡位置。对模型在静水中分别进行横摇、纵摇自由衰减试验,目的在于获得这些运动的固有周期和阻尼系数等重要参数,验证模型制作以及重心和转动惯量模拟的准确性[6]。分别进行多次横摇和纵摇衰减试验,取所得结果的平均值作为数值计算输入的阻尼系数。
从深吃水干树式半潜式平台模型静水自由衰减试验统计结果可知,平台的横摇和纵摇固有周期均为45.6 s,横摇的无因次阻尼系数为0.076,纵摇的无因次阻尼系数则为0.075。试验所得的无因次阻尼系数将输入数值计算模型中,用于频域和时域分析。
1.4 RAO试验
试验研究过程中,可以用在白噪声波谱不规则波浪中的一次试验代替在一系列规则波中的模型试验,同时试验精度也有较大改善。浮体在不规则波试验中测得的运动参数表现为运动谱的形式,将运动谱与入射波谱进行对比,可以得到对应频率的运动幅值响应函数RAO[7]。
在白噪声不规则波条件下,对深吃水半潜平台模型进行RAO试验,由于半潜平台模型前后、左右对称,因此浪向角选取180°和135°。试验RAO与数值计算RAO的对比分析结果,可以验证试验的正确性与否,并确定阻尼系数的选取是否正确。
1.5 不规则波耐波性试验
对深吃水半潜平台进行不规则波试验,模拟环境条件为百年一遇工况,仅考虑波浪的影响。试验中实测波浪作用时间为25 min。
百年一遇环境工况,浪向角为180°时模型试验结果见表3。经过换算可得实船统计结果见表4。

表3 模型试验180°统计结果
百年一遇环境工况,180°浪向角时平台的纵摇最大值为4.22°,垂荡运动幅值为6.85 m。试验过程中发现,百年一遇环境工况,180°浪向角时波浪淹没了半潜式平台的立柱,但并未对甲板造成冲击,见图3。
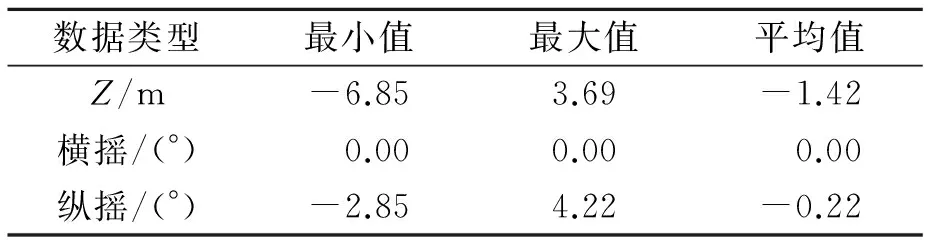
表4 实船180°统计结果

图3 百年一遇工况180°浪向试验现场
百年一遇环境工况,浪向角为135°时模型试验结果见表5。经过换算可得实船统计结果见表6。

表5 模型试验135°统计结果

表6 实船135°统计结果
百年一遇环境工况,135°浪向角时平台的纵摇和横摇运动相似,最大值分别为3.76°和3.05°,垂荡运动幅值为6.3m。试验过程中发现,百年一遇环境工况,135°浪向角时波浪淹没了半潜式平台的立柱,但并未对甲板造成冲击,见图4。

图4 百年一遇工况135°浪向试验现场
2 数值模拟
2.1 数值模型
AQWA为研究复杂运动和响应分析所需的初始水动力参数提供了一个集成环境,可用于复杂结构的三维线性绕射和辐射分析。利用AQWA软件建立干树式半潜平台在1 500 m工作水深的水动力湿表面模型,见图5。建模时,立柱和浮筒用Panel单元模拟,因为其尺寸偏大,辐射作用显著,其水动力基于三维势流理论计算,而平台的桁架构件,属于小尺度构件,则应用TUBE单元(莫里森单元)进行模拟,基于Morison公式计算其受到的波浪力[8]。

图5 水动力湿表面模型
2.2 频域分析
由于平台主体设计采用全对称的方式,所以频域计算时,波浪入射角分别采用0°、15°、30°、45°、60°、75°、90° 7个方向。通过自由漂浮状态的频域计算可以得到不同频率单位波幅规则波下的6个自由度的运动幅值响应算子RAO,不同浪向角下的结果见图6。由于对称性,纵荡和纵摇可以分别参考横荡和横摇。

图6 不同浪向角下的RAO
通过计算得出平台横纵摇和垂荡运动的固有周期分别为45 s和21.8 s,其结果与模型试验测得近似。对深吃水半潜平台180°和135°浪向角时的RAO结果与模型试验的结果进行对比,比较结果见图7、8。
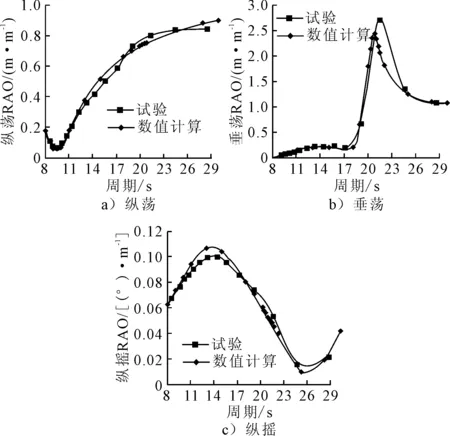
图7 180°浪向角下的比较结果
在白噪声波条件下,测得的180°和135°浪向角时平台6自由度RAO,与应用水动力软件AQWA计算得到的RAO吻合良好,验证了数值模型的正确性,同时获得了在不同频率单位波幅规则波作用下的水动力参数,包括一阶波浪力传递函数RAO、二阶波浪力传递函数QTF、附加质量以及辐射阻尼等,频域分析的结果为后面干树半潜平台的时域运动响应分析提供数据支持。
2.3 时域分析
根据锚泊参数在AQWA中建立平台的锚泊系统,模拟3×4的12点系泊形式,锚泊线为三段复合型式[4]。不考虑风载荷和流载荷的影响,只采用锚链线完整的工况来模拟。对半潜平台及其系泊系统进行极限海况下不规则波运动响应分析,预测平台的运动幅值,并校核其运动响应是否满足要求。

图8 135°浪向角下的比较结果
平台运动应当满足如下设计要求。
1)要满足立管的设计极限要求,系泊完整状态下,平台极限位移不超过5%的水深。
2)为满足干树采油要求,平台垂荡幅值要小于8 m。
180°浪向角下的6个自由度的运动统计结果见表7。由表7 可知,在百年一遇环境工况浪向角为180°时,平台的水平偏移值为60.34 m,小于水深的5%;其垂荡运动幅值为5.04 m,小于8 m;纵摇运动幅值为5.59°,小于20°;平台的横荡、横摇和艏摇运动幅值都很小,可见该平台6自由度运动满足设计要求。
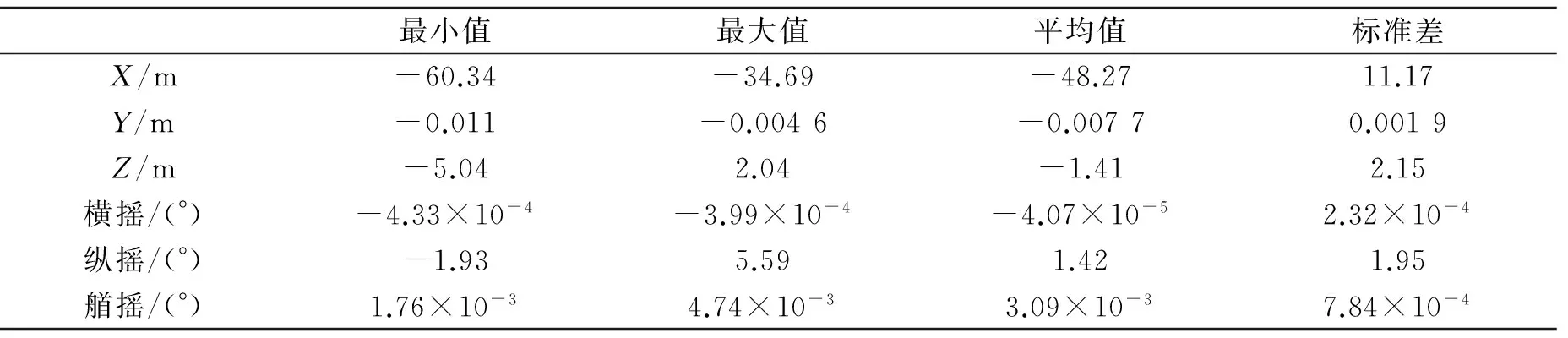
表7 180°浪向角下的结果
135°浪向角下的6个自由度的运动统计结果见表8。在百年一遇环境工况下,当浪向角为135°时,平台水平偏移极值为41.01 m,其垂荡运动极值为5.10 m,横摇运动与纵摇运动相似且幅值为3.61°。由此可知该平台6自由度运动满足规范要求。此外,由百年一遇环境工况的统计值结果可看出,当浪向角改变时,平台的最大垂荡幅值基本保持一致,所以该平台的垂荡运动与浪向相关度较小。

表8 135°浪向角下的结果
3 结论
1)通过对半潜式干树深水平台在静水中分别进行横摇、纵摇自由衰减模型试验,获得了这些运动在无系泊状态下的固有周期与阻尼系数等重要参数。在白噪声不规则波条件下,进行半潜式干树深水平台模型RAO试验,测得180°和135°浪向角时平台6自由度RAO,与应用水动力软件AQWA计算得到的RAO吻合良好,验证了数值模型的正确性,并得出平台横摇、纵摇和垂荡运动的固有周期分别为45,45,21.8 s。
2)通过平台模型的水平系泊不规则波运动试验研究发现,在百年一遇海况下,平台180°浪向的纵摇最大值为5.59°,垂荡偏移幅值为5.04 m;135°浪向下,横摇和纵摇运动相似,角度最大为3.61°,垂荡幅值为5.10 m。
3)经过数值计算和模型试验验证,该深吃水干树半潜平台设计合理,满足规范要求。
[1] 龙筱晔,李巍,尤云祥.风浪流中Truss Spar平台耦合动力响应分析[J].中国海洋平台,2013(1):29-35.
[2] Wellens Peter R., Luppes Roel, Veldman Arthur EP, et al, CFD simulations of a semi-submersible with absorbing boundary conditions[M]. American Society of Mechanical Engineers,2009.
[3] 姜哲,谢彬,谢文会.新型深水半潜式生产平台发展综述[J].海洋工程,2011(3):132-138.
[4] 罗勇,高巍,申辉,等.新型深水干树半潜平台选型及总体性能分析研究[C].2013年中国海洋工程技术年会论文集,2013.
[5] 赖智萌,肖龙飞,寇雨丰,等.新概念深水半潜式生产平台水动力截断试验与数值计算[J].上海交通大学学报,2013(2):329-334.
[6] 田超.近岛礁浮式平台水动力模型试验研究[C].第十三届全国水动力学学术会议论文集,2014.
[7] 戴遗山.舰船在波浪中运动的频域与时域势流理论[M].北京:国防工业出版社,1998.
[8] 罗强.981半潜式钻井平台锚泊系统研究[D].长江大学,2012.
Dynamic Response Analysis and Model Test of Deep Draft Semi-submersible Platform
XUXiang,KANGZhuang,FUSen,JIAWu-yang
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
In order to analyze the motion response of semi-submersible platform with a deep draft in actual conditions, the motion response analysis were made in frequency domain and time domain by AQWA. The model test of semi-submersible platform was carried out to study the RAO of 6 degrees of freedom and dynamic response in irregular waves. The results obtained by the two methods about RAO curves and motion amplitude in ultimate conditions were comparatively analyzed, proving the correctness of numerical methods. The numerical results showed that motion response of the deep draft semi-submersible platform meets the requirements of design.
deep draft semi-submersible platform; model test; RAO; irregular wave; motion response
U674.941
A
1671-7953(2017)06-0131-05
10.3963/j.issn.1671-7953.2017.06.030
2017-03-05
2017-04-17
徐祥(1991—),男,硕士生
研究方向:船舶与海洋工程设计与制造
