基于测量机器人的自动化变形监测系统设计与实现
2018-01-09黄声享李洋洋
张 文,黄声享,2,李洋洋
(1.武汉大学 测绘学院,湖北 武汉 430079; 2.地球空间信息技术协同创新中心,湖北 武汉 430079)
基于测量机器人的自动化变形监测系统设计与实现
张 文1,黄声享1,2,李洋洋1
(1.武汉大学 测绘学院,湖北 武汉 430079; 2.地球空间信息技术协同创新中心,湖北 武汉 430079)
针对目前水利、交通、建筑等行业大型工程对自动化变形监测的需求,利用测量机器人能自动完成目标精确照准、读数的特点,研发基于测量机器人的自动化变形监测系统。文中详细介绍自动化监测系统的组成、功能模块以及工作流程,通过工程测试验证该系统架构和相关技术的可行性。
测量机器人;变形监测;自动化;软件系统
随着我国水利、交通、建筑等行业的快速发展,对大型工程的变形监测工作提出要求,相对于传统的人工监测,自动化变形监测才能满足其高精度、高频率等需求[1]。与此同时,自动化测量技术的持续发展,特别是具有自动目标照准功能测量机器人的出现和发展,为实现变形监测自动化提供技术支撑[2-5]。测量机器人具有高精度、高效率、稳定性好等特点,目前,已广泛应用于大坝[6]、基坑边坡[7]、地铁[8-9]以及各种大型建(构)筑物等的自动化变形监测中,并取得良好成效。本文以自动化采集数据、实时分析、远程控制为研究目标,设计并实现了基于测量机器人的自动化变形监测系统,系统通过远程控制测量机器人自动化定时观测,实时处理分析得到三维变形信息,并根据变形信息进行智能报警和自动报表输出。
1 系统设计
1.1 系统结构与组成
基于测量机器人的自动变形监测系统,采用极坐标测量方法,通过计算机控制测量,获取目标点相对于测站的角度、距离,进行差分改正后,计算得到目标点的三维坐标信息。其主要有五大部分构成:基准点、变形点、测量机器人观测站、计算机控制系统、电源和通讯线路部分。系统逻辑结构如图1所示,系统组成如图2所示。
1.2 系统功能架构
根据相对独立、尽量小的数据依赖、最小数据冗余、管理发展的需要以及系统分阶段实现的原则,本系统共划分为4个子系统,分别为系统管理子系统、工程信息管理子系统、监测数据管理子系统和监测数据分析子系统,整个系统又可划分为10个不同的功能模块,具体的划分情况见图3。

图1 系统逻辑结构
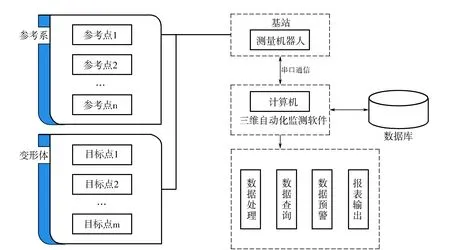
图2 系统组成

图3 系统功能模块划分
1.3 系统业务流程
本系统工作流程:首先建立计算机和测量机器人的通信;然后对测量机器人进行初始化,进行测站定向及控制限差的设置;所有设置完毕后便进行学习测量,也可以直接导入学习测量数据执行自动观测任务;接下来设置点组,根据点位以及监测频率将相同的观测点编入同一点组;然后进行循环任务的编辑;最后便是根据循环任务的设置来控制仪器定时进行自动观测,一周期观测完毕后,软件对原始观测数据进行差分处理,得到各变形点的三维坐标、变形量。系统详细流程如图4所示。

图4 系统业务流程图
2 系统实现的关键技术
2.1 数据通讯技术
系统基于徕卡测量机器人进行开发,采用其提供的ASCII字符串[10]指令进行控制。计算机发送固定格式的ASCII字符串给仪器,仪器接收该指令后,进行对应的操作,操作完成后通过串口返回固定格式的信息,返回信息中有操作是否成功、对应的测量数据信息等。
通过无线通讯技术,可以不进入监测现场,仅在项目部或者远程控制中心就能够实现计算机和测量机器人之间实时的数据交换,达到对测量机器人进行远程控制和管理的目的。系统采用了无线电台和GPRS两种方式实现无线通讯。其中,无线电台方式传输距离和障碍物的穿透绕射能力有限,与传输频率相关;GPRS方式则需要移动通讯网络信号覆盖,以及一台固定IP地址的服务器。实际应用中根据现场和设备情况,确定无线通讯的方式。
2.2 实时差分改正
测量机器人在角度、距离的测量过程中会受到很多误差因素的干扰,例如大气折光、气温、气压变化、仪器内部误差等,直接求出这些误差的大小是非常困难的。在有限空间时间内,观测期间的气象等因素是稳定的,且对同一环境下测量目标的影响相同,可认为这些误差是一个常数。因此,系统利用固定参考基准进行实时差分改正,可减弱或消除这些误差,提高测量的精度。
每一周期,在观测变形点的同时也要对参考点进行观测,并且认为测得的参考点坐标与其初始坐标之间的差值就是由大气折光、气温、气、变化、仪器内部构造等引起的,然后利用差值按照距离长短求出观测值误差的比例系数,最后利用每个观测量的误差比例系数对变形点观测量进行改正,并求出改正后的坐标。
在观测时对参考点尽量要有多余观测,同时参考点可以选择空间上均匀分布的2~5个,并且观测顺序也在时间上均匀分布,取所有改正信息的平均值以避免单一参考点、单一时间点的气象及仪器本身的影响不具有代表性的特点,从而更好的对观测值进行改正。
2.3 数据预测分析
对监测点的变形值进行建模,采用数学模型逼近、模拟,可以揭示变形体的变形规律和动态特征,同时也可通过模型预测变形的发展趋势,为工程施工提供科学的决策依据,避免安全事故的发生[11]。本系统以曲线拟合、时间序列、灰色系统GM(1,1)3个模型进行研究和算法代码编写,通过对变形数据分析,建立模型,预测后续变形趋势,进而判断变形体的安全状态。如图5所示系统预测分析实例。

图5 监测点变形预测分析:JCD02的X方向
2.4 智能化处理策略
1)测量失败控制策略。在自动化监测中,由于外界临时遮挡等因素影响,全站仪无法找到目标,本系统对于这种情况采用等待、重复尝试的方式,如果重复测量后仍无法找到目标,则跳过进行下一个点测量,同时将该点放入一个测量失败点集,在其他点测量完成后,最后再将失败点测量一遍,如果最后一次都没能测量到目标,则将该点所有观测原始数据作“0”存储,计算成果时进行插值处理。
2)智能报警策略。当测量机器人照准目标后,首先进行一次坐标测量,用测量结果与该目标的初始坐标进行对比,若坐标较差超过系统设置的目标识别限值,则说明目标照准错误,通过调整视场设置,重新寻找准确目标,若依旧无法照准,则系统向管理人员发送异常报警信息。重复观测时,各测回间角度、距离超过限差时,会判定超限测回失败,继续测量直到测量成功次数达到设定值。测量完成后,实时计算出变形量,根据累计、本次变形量和变形速率,根据变形量和报警值,实时更新工程安装状况,并实现了三级报警机制。
3 系统测试
基于测量机器人变形监测系统开发完成后,在建筑物变形监测、大型雕像变形监测等工程中进行了测试,测试实景如图6和图7所示。其中,建筑物变形监测为固定观测墩放置仪器,远程无线控制测量,实现高层建筑变形自动化监测;大型雕像变形监测通过有线方式进行通讯,对布设在雕像特征点位的棱镜进行周期观测。系统主界面如图8所示,图9为监测点位变形过程曲线查看界面。
实际工程测试结果表明,基于测量机器人的自动变形监测系统能很好地实现三维变形信息的自动化监测,可以满足工程实际使用的要求,实现了自动化采集数据、实时分析、远程管控。

图6 建筑物变形监测测试
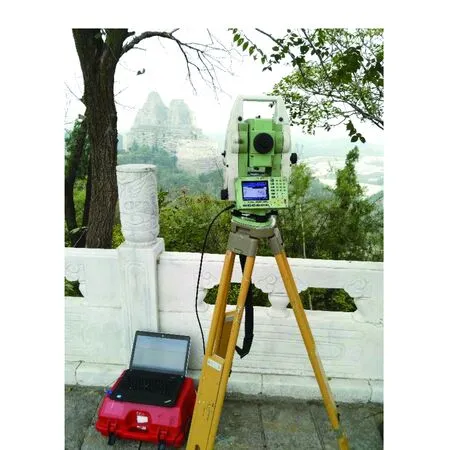
图7 大型雕像变形监测测试

图8 系统主界面

图9 系统监测点位变形过程曲线界面
4 结束语
基于测量机器人的自动变形监测系统,利用测量机器人在一定的视场范围内能自动搜索、照准、读数的特点,实现了自动化的定时观测、计算、分析、报警、成果输出等工作。工程测试表明,系统可以满足工程实际中自动化变形监测的要求,具有自动化、智能化、实时、远程可控、通用性强、操作简单、界面友好等特点,可应用地下空间工程变形监测、大坝变形监测、地质灾害监测、高铁轨道变形监测、高层建筑物变形监测等。
[1] 张正禄.工程测量学[M].武汉:武汉大学出版社,2005.
[2] 郭际明,梅文胜,张正禄,等.测量机器人系统构成与精度研究[J].武汉测绘科技大学学报,2000,25(5):421-425.
[3] LUO Changlin, ZHANG Zhenglu, MEI Wensheng, et al.Teaching Practice of Automatic Measurement with Georobot[R].Hong Kong:FIG Working Week,2007.
[4] 梅文胜,张正禄,郭际明,等.测量机器人变形监测系统软件研究[J].武汉大学学报(信息科学版),2002,27(2):165-171.
[5] ALEGRIA F C,ANTONIO F,TRAVASSOS M.Implementation Details of an Automatic Monitoring System Used on a Vodafone Radio communication Base Station[J].Engineering Letters,2008,4(16):529-536.
[6] 王洪.TCA测量机器人在大坝变形监测中的应用[J].测绘与空间地理信息,2010,33(3),22-25.
[7] 崔有祯,李亚静.徕卡TM30测量机器人三维测量在基坑边坡监测中的应用[J].测绘通报,2013,(3):75-77.
[8] 张海丽,孙昊,姚连壁.基于TCA2003测量机器人的滑坡变形监测系统开发与应用[J].大地测量与地球动力学,2012,32(1):152-155.
[9] 范本.基于测量机器人TM30技术地铁隧道建设自动变形监测研究[D].重庆:重庆大学,2012.
[10] TPS1200 GeoCOM Getting Started Manual[M].Leica Geosystems AG,Heerbrugg Switzerland,2006.
[11] 黄声享,尹晖,蒋征.变形监测数据处理[M].2版.武汉:武汉大学出版社,2010.
Design and implementation of automatic deformation monitoring system based on georobot
ZHANG Wen1,HUANG Shengxiang1,2,LI Yangyang1
1.School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China;2.Collaborative Innovation Center of Geospatial Technology, Wuhan 430079, China)
Aiming at the requirement of automatic deformation monitoring in large engineering such as water conservancy, transportation and construction, the automatic deformation monitoring system based on georobot is developed based on the characteristics of the automatic sighting and observing. In this paper, the design of automatic deformation monitoring system based on georobot is introduced in detail, and the key technology in the system implementation is discussed. The feasibility of the system architecture and related technologies have been verified by engineering tests.
georobot; deformation monitoring; automation; software system
2016-12-22
国家自然科学基金资助项目(41274020)
张 文(1988-),男,博士研究生.
著录:张文,黄声享,李洋洋.基于测量机器人的自动化变形监测系统设计与实现[J].测绘工程,2018,27(2):37-41.
10.19349/j.cnki.issn1006-7949.2018.02.007
TP242
A
1006-7949(2018)02-0037-05
李铭娜]
