一种适用于空间非合作目标的角点检测算法
2018-01-09江腾达
江腾达,邢 帅,李 鹏
(信息工程大学 地理空间信息学院,河南 郑州 450001)
一种适用于空间非合作目标的角点检测算法
江腾达,邢 帅,李 鹏
(信息工程大学 地理空间信息学院,河南 郑州 450001)
随着在轨失效航天器数量不断增加,针对这类空间非合作目标的在轨服务需求日益迫切。由于在轨的非合作目标飞行器上无法布置合作标志器,通过提取非合作目标上的关键轮廓角点对其进行跟踪。本文针对空间非合作目标所具有的特性,传统Harris算子对运动非合作目标角点的检测中存在大量的伪角点,提出一种基于Canny边缘检测的Shi-Tomasi角点检测方法,即对影像先进行滤波、二值化及形态学处理,其次利用Canny边缘检测获得其轮廓后再进行Shi-Tomasi角点检测。实验结果表明,该算法能有效地解决深空中光照条件等因素造成的角点难以检测问题以及减少伪角点,对空间非合作目标的关键角点提取有较好地检测精度和准确性。
非合作目标;角点检测;Harris算法;Shi-Tomasi算法;Canny边缘检测
近些年来,随着空间技术的快速发展,外太空航天器数量的不断增加,失效的航天器也在增多,严重威胁着正常工作航天器的安全运行。因此,为了安全、持续的开发和利用空间资源,必须不断提高对失效航天器的在轨维修以及清理技术。由于大多数已在轨的失效航天器都是非合作的,即没有用于辅助测量的合作标志器,如何准确检测到角点是进行空间非合作目标的自主识别的关键[1-3]。目前,在深空中运行的卫星多达上千颗,有资源勘察卫星、侦察卫星、气象卫星等,其中多数卫星都是有规则的、常见的结构,如太阳能帆板、星箭对接环、天线等。由于大多数卫星的太阳能帆板及卫星主体都是规则的矩形,且在特征检测中矩形容易检测,所以通常将卫星的太阳能帆板及卫星主体作为目标识别中的有利特征[4]。由于帆板其表面纹理单一且亮度偏暗,如何准确提取帆板的关键角点是在轨服务的前提。
角点是图像亮度变化比较剧烈的点或者是图像边缘曲线上曲率值极大的点,它在保留图像特征的基础上有效地减少了信息的数据量,从而提高了图像处理的速度以及实验精度。有利于实现目标图像特征的可靠匹配,在物体识别、目标跟踪以及运动估计中均发挥了重要作用。对于在轨的非合作目标的位姿估计,目标影像的角点检测是一项重要的基础工作。Inaba等人提出了一种非合作目标的识别与捕获方法[5]。德国宇航局(DLR)设计了一种针对非合作目标发动机的抓捕机构及基于多传感器数据融合的识别算法[6]。曾占魁等人提出空间非合作目标超近距离位姿测量技术研究。针对角点检测多数采用Harris算法[7-10],该算法自动化程度高,信息量大,提取的角点数量多,但由于深空中环境因素以及空间非合作目标的特性,检测的角点中有许多的虚假角点,这对后续的跟踪及匹配的并不是很理想,即该算法不太适用于运动的空间非合作目标。针对Harris算法对于运动的目标存在的缺点,Shi和Tomasi提出了Shi-Tomasi角点检测算法[11-12],它是Harris算法的改进,能克服Harris算法对于运动目标跟踪的不足。但Shi-Tomasi算法在角点检测时,仍受光照等条件的影响,使目标轮廓信息部分丢失而不能很好的提取强角点。针对非合作目标类卫星的角点检测,本文分析了Canny边缘检测及Shi-Tomasi角点检测算法原理,提出了一种基于Canny边缘检测的Shi-Tomasi角点检测方法,先通过Canny边缘检测,再进行Shi-Tomasi角点检测,可以提高后续角点的跟踪及匹配的稳定性和准确率,能更好地进行位姿变化估计。
1 Canny边缘检测
在图像特征中边缘仍然是很重要的。对于传统边缘的检测算子,如Prewitt、Robert、Sobel、LOG等,由于其本身存在各种不足,在许多情况下其检测效果并不令人满意。近年来,在传统方法的基础上,相继发展出了一批新的边缘检测方法,如基于自适应平滑滤波法、曲面拟合法、小波变换法等。尽管如此,Canny算子由于具有较好的信噪比和检测精度,仍在图像处理领域受到广泛应用。
Canny于1986年提出一个较好边缘检测算子且应满足如下3个判断准则,并提出一种新的边缘检测算子。
1)信噪比准则

(1)
式中:ɡ(x)是边界为[-w,+w]的滤波器脉冲响应,G(-x)是边缘函数,n0是高斯噪声的均方根,信噪比越小,提取的边缘质量越差,反之,则越好。
2)定位的精度准则

(2)
式中:G′(-x)和g′(x)分别表示G(-x)及g(x)的一阶导数,Localization值越小,表明定位精度越低,反之,表明定位精度越高。
3)单边缘响应准则:需保证单边缘只有一个像素响应,且检测算子的脉冲响应导数零交叉点的平均距离D(ɡ′)应满足:
(3)
若满足此条件,就能保证单边缘只有一个像素响应。
基于满足这三个判断准则,Canny推导出了一种最佳边缘检测算子即Canny算子。
2 Shi-Tomasi算子
虽然Harris算子相对于其他角点提取算法有明显的优势,但在深空环境下,本实验针对运动的非合作目标,且纹理过于单一,使用Harris算子对非合作目标卫星进行角点检测,很难满足目标的运动跟踪估计,因此本文采用了Shi-Tomasi算子进行角点检测。Shi-Tomasi是Shi和Tomasi提出的角点检测方法,它是Harris算子的改进,而Harris角点检测算子是由C.Harris和M.J.Stephens在1998年提出的一种基于信号的点特征提取算子,是在Moravec算法的基础上提出的。其中Moravec角点检测算法的思想:在图像中建立一个检测窗口,通过向各个方向微小的移动窗口,考察窗口的平均能力,当该能量变化值大于设定的阈值时,此时就将窗口的中心像素点提取为角点。假设像素点(x,y)的灰度为f(x,y),则图像中每个像素点(x,y)移动(u,v)的灰度变化为

(4)
式中:(u,v)取值为8个基本方向上的移动:(1,0),(1,1),(0,1),(-1,1),(-1,0),(-1,-1)(0,-1),(1,-1)。该方法只能检测窗口函数在8个基本方向上移动的强度变化,使得Moravec算子不具有旋转不变性,即如果将目标图像旋转15°后,原来能够检测到的角点现在并不能检测到,原来不是角点的点现在可能变成了角点,所以该方法不能准确提取到稳定的角点,因此,Harris在此基础上,通过微分运算和自相关矩阵来检测角点。其表达式:
(5)

定义矩阵
设λ1,λ2分别是M的两个特征值,而在Shi-Tomasi算法中,若两个特征值中较小的一个大于最小阈值,则会得到强角点。因为较大不确定度取决于较小的特征值,所以通过寻找最小特征值的最大值来寻找好的特征点。
3 基于Canny边缘检测的Shi-Tomasi角点提取
受采集环境的明暗程度和设备性能的优劣等因素的影响,通过光学传感器获取的空间非合作目标的影像往往存在噪声较大、灰度差异较小等缺点。另外,如距离的远近,焦距大小等因素又会使得目标在整幅图像中间的大小和位置存在不确定性,与常见目标不同,深空背景通常较为单一,假设相机影片的成像规律:①背景占据了图像的大部分;②背景在影像中呈最暗的颜色。在实验室条件下进行半物理仿真实验。图1为实验室条件下模拟的一幅空间目标观测影像。

图1 模拟空间目标观测影像

图2 Harris角点检测结果
通过观察影像可以发现,目标纹理结构简单且与背景颜色比较接近,给角点检测带来不少困难,再不做任何处理的情况下,其检测结果如图 2所示,即需对原始影像进行一系列的预处理,如均值滤波、二值化以及形态学处理等[14]。
国内外许多学者在针对空间非合作目标的角点检测方面多采用的是Harris角点检测算法,该算法计算简单,自动化程度高,具有良好的信息量,且其能检测到不少的角点,但其检测的角点中存在不少的虚假角点,不利于后面位姿估计。而Shi-Tomasi算法虽然已经很成熟,是Harris角点检测算法的改进,但目前研究学者并未将其针对空间非合作目标进行角点的检测,通过实验的检测结果图 3可知,帆板上关键的角点基本能检测到,伪角点也很少。由于受光照及环境因素的影响,存在少数的关键角点未检测到,如图 3红框所显示,即需在进行角点检测之前先进行边缘检测获得其帆板轮廓,这样能更好的检测到非合作目标帆板轮廓的关键角点,于是提出一种基于Canny边缘检测的Shi-Tomasi角点检测算法。

图3 Shi-Tomasi角点检测
该方法的基本步骤:首先对卫星影像进行必要的预处理,主要包括影像去噪、影像二值化及形态学处理,然后对影像进行Canny边缘检测,最后采用Shi-Tomasi算子进行角点检测。其中Canny边缘检测、Shi-Toamsi角点检测 这两步是本算法的核心所在,这两步的结果直接影响后面角点的跟踪及位姿估计的好坏。该方法的主要流程如图 4所示。

图4 角点检测流程
4 实验结果分析
本文利用地面半物理仿真实验平台,如图 5所示,模拟了空间非合作目标的探测状态和过程,首先将卫星模型放于标尺上,再将其整体置于一块背景为黑色的帆布上,用帆布模拟深空背景,然后通过调节标尺使卫星模型运动,获取了若干序列实验观测影像,如图 6(a)所示。该空间非合作目标的序列影像具有共性特征;①纹理单一;②光照不均匀;③噪声大。因此需对影像进行自适应的二值化处理、形态学处理以及Canny边缘检测,其结果分别如图 6(b)、(c)及(d)所示。

图5 实验条件
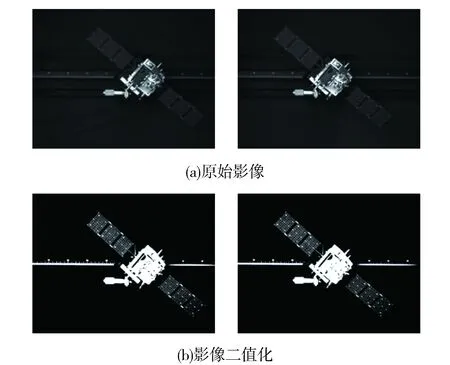

图6 影像的二值化、形态学处理及Canny边缘检测
本文通过Harris角点检测、Shi-Tomasi角点检测与本文算法三种方法进行角点检测的比较。根据图7的实验结果可知,图 7(a)所示, Harris算法计算简单,自动化程度高,具有良好的信息量;由于受光照的影响大,其检测的角点中存在很多的伪角点,这对后续空间非合作目标的相对位姿变化的估计有很大的影响,不利于运动目标位姿估计。而Shi-Tomasi角点检测算法能很好的克服Harris运动的非合作目标角点检测中不足,且具有旋转不变性,可减少伪角点;但仍受光照条件及环境的影响, 通过图 7(b)的红色标框可知,帆板上仍有部分关键角点难以检测,所以需要对其进行必要的处理,即对影像先进行边缘检测,获得其完整轮廓,再进行Shi-Tomasi角点检测,如图 7(c)所示,从实验结果中可发现,本文方法比Shi-Tomasi算法能更好、更稳定地检测到目标轮廓的关键角点。这将有利于后续的角点跟踪及位姿估计,可以通过后续的位姿估计验证本文方法的优势。
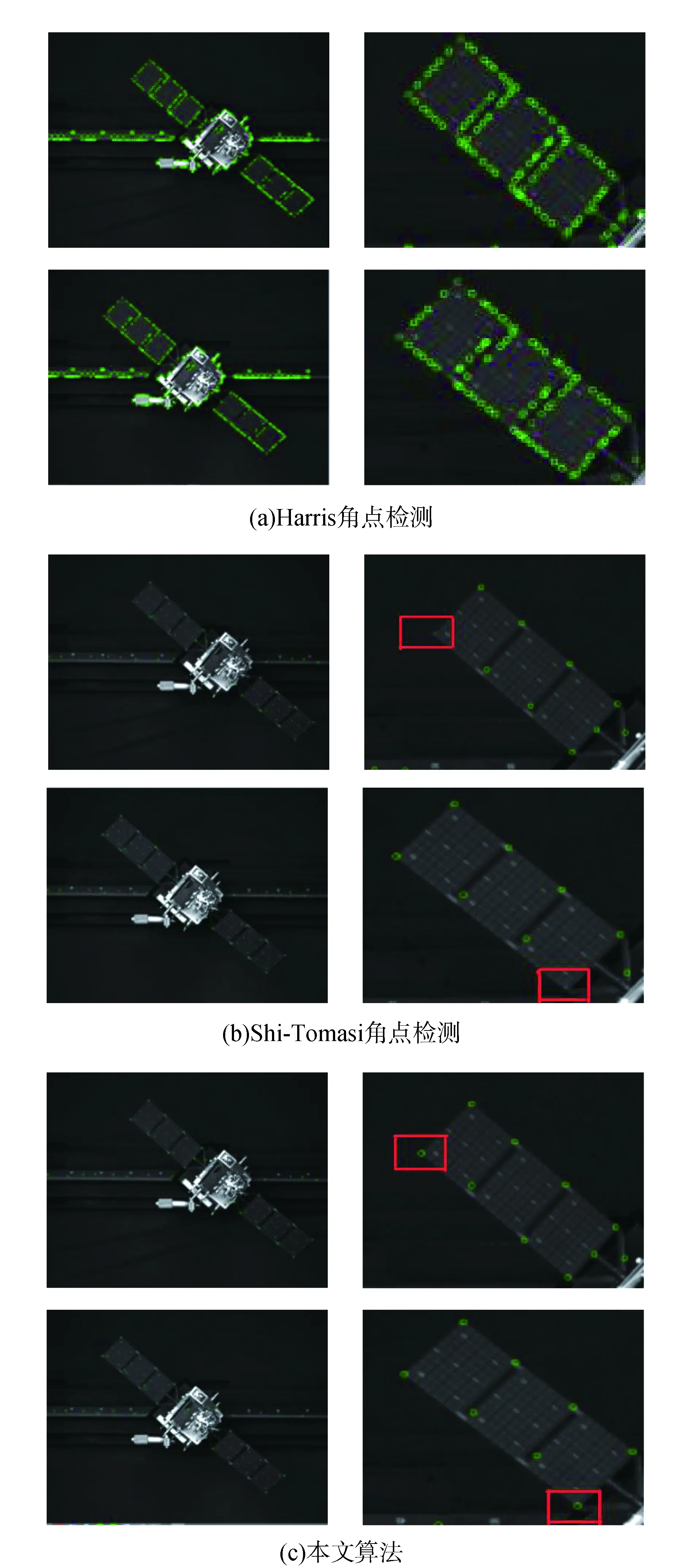
图7 影像角点检测的比较
所谓的位姿估计就是利用提取的角点进行跟踪、立体匹配及前方交会获得其三维信息,其次通过序列影像进行其角点的位姿变化,从而能获得其目标的位姿变化,达到对目标的实时跟踪。本文也通过序列影像的位姿估计对角点提取方法做了比较,其结果如图8所示。从上文可知,由于国内外对空间非合作目标的研究还不是很成熟,其实验数据很难获取,因此本文采用的影像是在实验室条件下模拟获取的,通过卫星模型在标尺上的移动模拟空间非合作目标与相机之间的相对运动,本实验的条件是假设卫星模型不发生旋转,只在标尺上以10 mm为单位向x方向移动,每移动一次通过立体相机拍摄下来,获得其此刻的影像。对该立体序列影像进行处理估计其位姿变化。通过表1实验结果可知,由于实验条件的局限性,卫星在标尺上每运动一次,由于抖动造成其在三个旋转角方向及△Y,△Z上有微小的变化,但△X的大小体现了本实验结果的好与坏,且△X的真值是10 mm。分析结果可知本文的角点提取算法精度高于Harris和Shi-Tomasi算法。
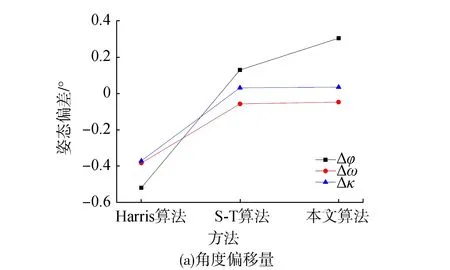

图8 三种方法的位姿估计结果

表1 通过位姿估计进行三种方法的比较
因此本文提出的基于Canny边缘检测的Shi-Tomasi角点检测方法能够有效检测出在轨空间非合作目标轮廓的关键角点,检测结果具有较好的稳定性,有助于关键角点卫星位姿变化的跟踪和估计。
5 结 论
对空间非合作目标进行有效的角点检测是开展目标位姿估计的基础。由于受光照和空间背景等多种因素的影响,传统的角点提取算子不能很好地适用于空间非合作目标的角点,因此,本文提出一种基于Canny边缘检测的Shi-Tomasi角点检测方法。本文在影像预处理的基础上利用Canny边缘检测的Shi-Tomasi角点检测方法。本文在影像预处理的基础上利用Canny边缘检测获得其目标的轮廓信息,再结合Shi-Tomasi算法进行角点检测,有效地降低深空环境下的光照条件对角点检测的影响。实验结果表明该方法的有效性和可靠性,适用于深空中运动的卫星类目标的角点跟踪。
[1] 徐文福, 梁斌, 李成,等. 基于立体视觉的航天器相对位姿测量方法与仿真研究[J]. 宇航学报, 2009, 30(4):1421-1428.
[2] 徐培智. 基于视觉和激光的空间非合作目标相对位姿测量技术研究[D]. 南京:南京航空航天大学, 2014.
[3] 曾占魁,魏祥泉, 黄建明,等. 空间非合作目标超近距离位姿测量技术研究[J]. 上海航天, 2013, 30(6):10-17.
[4] 苗锡奎, 朱枫, 郝颖明,等. 基于太阳能帆板部件的空间非合作飞行器视觉位姿测量方法[J]. 高技术通讯, 2013, 23(4):400-406.
[5] INABA N, ODA M, ASANO M. Rescuing a Stranded Satellite in Space : Experimental Robotic Capture of Non-Cooperative Satellites[J].Transactions of the Japan Society for Aeronau-tical & Spaceences, 2006, 48(162):213-220.
[6] CHRISTIANSEN S, NILSON T. Docking System for Autonomous, Un-manned Docking Operations[C].//Aerospace Conference. IEEE, 2008.1-14.
[7] HARRIS C. A Combined Corner and Edge Detector[C].// Alvey Vision Conference. 1988.147-151.
[8] 房超, 王小鹏, 牛云鹏,等. 基于改进Harris算法的角点检测[J]. 计算机与数字工程, 2011, 39(5):142-144.
[9] 王瑞, 郝娜, 张波,等. 一种自适应Harris角点检测算法[J]. 火力与指挥控制, 2015(7):84-86.
[10] 吴鹏, 徐洪玲, 李雯霖,等. 基于区域检测的多尺度Harris角点检测算法[J]. 哈尔滨工程大学学报(英文版), 2016, 37(7):969-973.
[11] 于仕琪,刘瑞祯. 学习 OpenCV(中文版)[M]. 北京:清华大学出版社,2009:351-355.
[12] SHI J,TOMASI C.Good feature to track[C]//Proc Of IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press,1994:593-600.
[13] 戴青云,余英林. 数学形态学在图像处理中的应用进展[J].控制理论与应用,2001,18(4):478-482.
[14] 牛瑞, 王昱, 戴兵. 一种基于数学形态学的星点提取方法[J]. 测绘科学与工程, 2016(4):33-38.
A key feature point detection algorithm for non-cooperative target in space
JIANG Tengda, XING Shuai, LI Peng
(School of Surveying and Mapping , Information Engineering University, Zhengzhou 450001,China)
With the increase of the number of spacecraft in orbit, the demand for the service of this kind of non-cooperative target in space is becoming more and more urgent. Due to the problem that orbit non-cooperative target aircraft cannot be arranged cooperative markers, the key outline corners extracted from non-cooperative target can track the target. Aiming at the characteristics of space non-cooperative targets, the traditional Harris algorithm has a large number of pseudo-corner points in motion detection of non-cooperative targets.To solve the problem, the paper proposes a method combined Canny edge detection with Shi-Tomasi corner detection. First, the process for images includes filtering, binarization and morphological processing, then the Canny edge detection is used to obtain the contour and combine with Shi-Tomasi corner detection to obtain the result. The experimental result shows that this algorithm can effectively solve the difficult detection problems and pseudo-corner points in deep space due to the lighting conditions, of which the detection has better precision and accuracy.
non-cooperative target;corner detection; Harris algorithm; Shi-Tomasi algorithm; Canny edge detection
2016-11-09
国家自然科学基金资助项目(41371436);国家973计划项目(2012CB720001)
江腾达(1990-),男,硕士研究生.
著录:江腾达,邢帅,李鹏.一种适用于空间非合作目标的角点检测算法[J].测绘工程,2018,27(2):65-70.
10.19349/j.cnki.issn1006-7949.2018.02.013
TP391.4
A
1006-7949(2018)02-0065-06
李铭娜]
