玉米免耕播种机主动式秸秆移位防堵装置的设计与试验
2018-01-09王韦韦朱存玺陈黎卿李兆东李金才
王韦韦,朱存玺,陈黎卿,李兆东,黄 鑫,李金才
玉米免耕播种机主动式秸秆移位防堵装置的设计与试验
王韦韦,朱存玺,陈黎卿,李兆东,黄 鑫,李金才※
(安徽农业大学工学院,合肥 230036)
针对黄淮海麦玉轮作区小麦秸秆全量还田下苗床整备前存在多机具多次下田、生产成本高以及传统玉米免耕播种机在小麦秸秆全覆盖地作业时存在开沟壅堵、架种、晾种等问题,该文设计了一种基于“秸秆移位”防堵思路的主动式秸秆移位防堵装置。运用EDEM软件构建无支撑秸秆全覆盖土壤离散元模型,在秸秆-土壤-主动式防堵装置系统中进行秸秆移位虚拟仿真,设定了主动式秸秆移位防堵装置的刀轴驱动转速为500 r/min、回转半径为120 mm、刀盘幅宽为216 mm及刀齿入土深度为10 mm,利用仿真数据对秸秆扰动位移、清秸率进行分析,检验主动式秸秆移位防堵装置结构参数和运动参数设计的合理性。田间试验结果表明,安装主动式秸秆移位防堵装置的玉米免耕播种机的作业通过性稳定,改善种床环境,开沟壅堵次数为0次,秸秆清秸率为90.21%,相比仿真减少8.29个百分点。该研究可为小麦高留茬、秸秆全覆盖地的玉米免耕播种机的设计与推广提供参考。
机械化;设计;计算机仿真;秸秆移位;离散元法;秸秆全覆盖地;免耕播种;主动式防堵
0 引 言
中国华北麦玉轮作区以冬小麦收后播种夏玉米为主,传统耕作模式为小麦秸秆抛洒还田后使用灭茬机、旋耕机、播种机顺次作业下田完成播种。多机具多次下田导致耕层板结严重,影响玉米播种质量、出苗差、苗质弱[1-2]。且小麦秸秆覆盖地板茬直播玉米依然存在以下主要问题:机具入土部件挂草壅堵,作业顺畅性难以保证;种子易播在秸秆上,造成架种;覆土不可靠,易造成晾种[3-5]。因此,解决开沟器铲柄堵塞问题是设计免耕播种机的关键。
秸秆覆盖还田和免耕播种是机械化保护性耕作的核心技术[6]。目前国内外免耕播种机上防堵装置工作方式主要包括分茬和切茬2种类型。其中分茬主要是将粉碎的无支撑秸秆推离播种区,如凹形圆盘[7]、拔指轮[8]、伸缩拔杆[9]、分草铲[10]等。这类防堵装置在秸秆全量还田时分茬效果不显著,防堵性能降低。切茬主要是将播种区秸秆进行二次切断,以防止秸秆缠绕机具入土部件。切茬的方法又分为被动式和主动式2种类型。其中被动式开沟防堵装置多采用破茬圆盘等结构[11],该类型主要依靠机具自身质量和地面摩擦驱动圆盘刀刃口滚动切断秸秆、切开土壤开沟,防堵能力强,但当地表秸秆覆盖量过大时,秸秆不能被切断而被压入土壤,导致开沟器入土困难,出现晾籽,影响播种质量;而主动式开沟防堵装置是利用高速旋转的旋耕刀[12]、灭茬刀[13]、破茬圆盘[14]对播种条带进行旋耕、灭茬,特点是开沟能力强,防堵效果好,但存在土壤扰动量大,破坏墒情、功耗高,机具振动强烈,作业环境恶劣且存在安全隐患等问题。
本文研究针对传统玉米免耕播种不适应高留茬、秸秆覆盖地作业,存在开沟壅堵、架种、晾种等问题,设计了一种基于“秸秆移位”防堵思路的主动式秸秆移位防堵装置,基于离散元法构建土壤-秸秆-防堵装置系统模型,利用防堵装置仿真作业性能试验检验秸秆移位装置工作参数设计的合理性;通过秸秆移位免耕播种机田间试验,验证离散元土壤-秸秆-防堵装置系统模型的准确性和可行性,保证玉米免耕播种机在小麦高留茬、秸秆全量还田时的通过性。
1 总体结构与设计原理
1.1 总体结构
2BMY-4型玉米免耕播种机主要由主机架、主动式秸秆移位防堵装置、开沟施肥装置、播种单元体、覆土镇压装置组成,如图1所示。该机具采用秸秆移位的方式,一次下田作业可有效完成秸秆全覆盖板茬地种床整备、侧深施肥、单粒播种、覆土镇压等作业环节。
1.2 秸秆移位防堵装置设计原理
如图2所示,秸秆移位防堵装置结构主要包括交叉对偶立式刀片、旋转刀盘和旋转轴承。小麦秸秆全覆盖地“秸秆移位播种”的作业思路指:待播区地表上的秸秆在防堵装置旋转扰动作用下,沿着回转刀尖切线方向向种床一侧进行移位,实现待播区地表平整无秸秆,随后开沟器完成开沟破土、苗床整理、施肥播种。其中,立式刀片与秸秆、土壤间相互作用依次为砍切、扰动、平整。且刀片对称交叉布置主要为了扰动作业过程中满足动平衡要求。
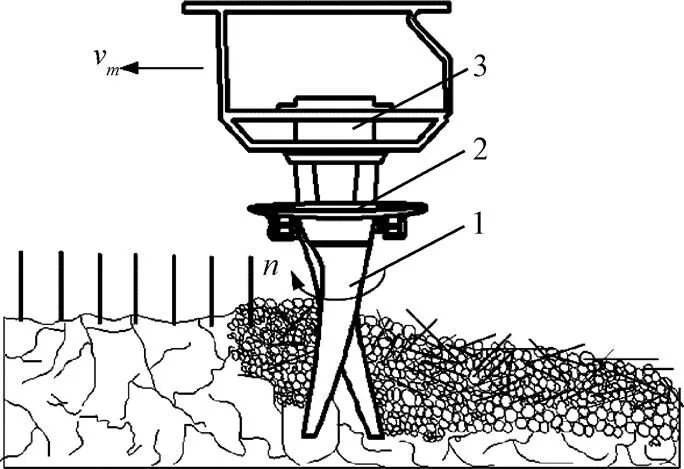
1.对偶立式刀片 2.旋转刀盘 3.旋转轴承
1.Dual vertical blade 2.Rotating cutter head 3.Rotary bearing
注:v为作业前进速度,m·s-1;为刀盘工作转速,r·min-1。
Note:vis forward operation velocity, m·s-1;is driving velocity of the cutter shaft, r·min-1.
图2 秸秆移位防堵装置结构示意图
Fig.2 Structural diagram of straw-removing anti-blocking device
2 秸秆移位防堵装置工作参数设计
2.1 刀刃运动轨迹分析
防堵装置在旋转工作时呈现往复运动,对偶立式旋刀绕刀盘中心旋转为相对运动,作业机组匀速前进运动为牵连运动,以防堵装置旋转中心为原点建立固定坐标系,轴正方向与作业机组前进方向一致,轴为与机组前进方向垂直平面的水平向右方向,如图3所示。为刀轴回转角速度,v为刀刃端点的切向速度,作业机组前进速度v,其中防堵装置回转方向与机组作业方向垂直,开始时对偶立式刀片的端点位于前方水平与轴重合,则防堵装置端点的运动轨迹方程为
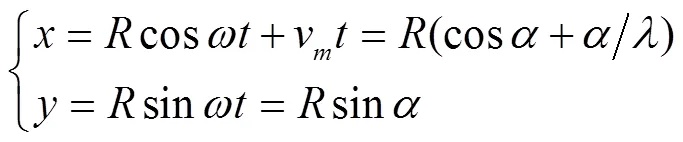
将式(1)[15-16]中消除时间参数数,可得刀齿运动轨迹方程

式中、为立式对偶刀端点在任意时刻的位置坐标;防堵装置转角;刀刃端点的切向速度v=R;令为速度比:λ=v/v;为时间,s。
当<1时,由(1)式可得,无论防堵装置运动到什么位置,秸秆的位移方向与机组作业方向相同,其运动轨迹呈短摆线,不能够达到清秸防堵的目的;当1时,防堵装置运动轨迹呈余摆线,对偶刀片才能满足向种床侧后方进行秸秆移位。
注:O为防堵装置旋转中心;O1为防堵装置t时刻转动中心;N为作业刀刃起始位置;N1为作业刀刃t时刻位置;α为刀轴转角,(°);R为防堵装置旋转中心O到刀刃端点的距离(防堵装置回转半径),mm;ω为防堵装置的角速度,rad·s-1。
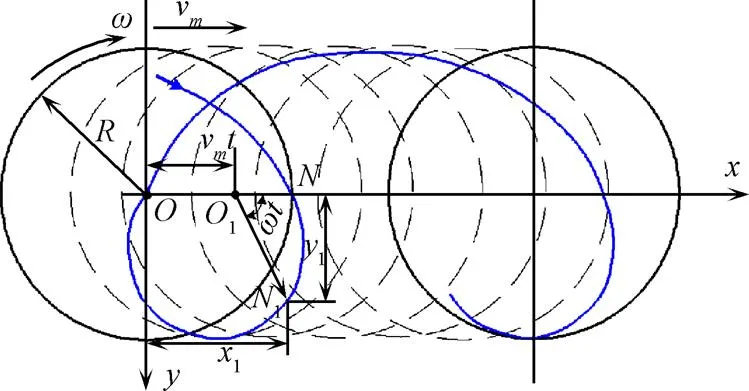
四行免耕播种机防堵装置布置示意图如图4所示。
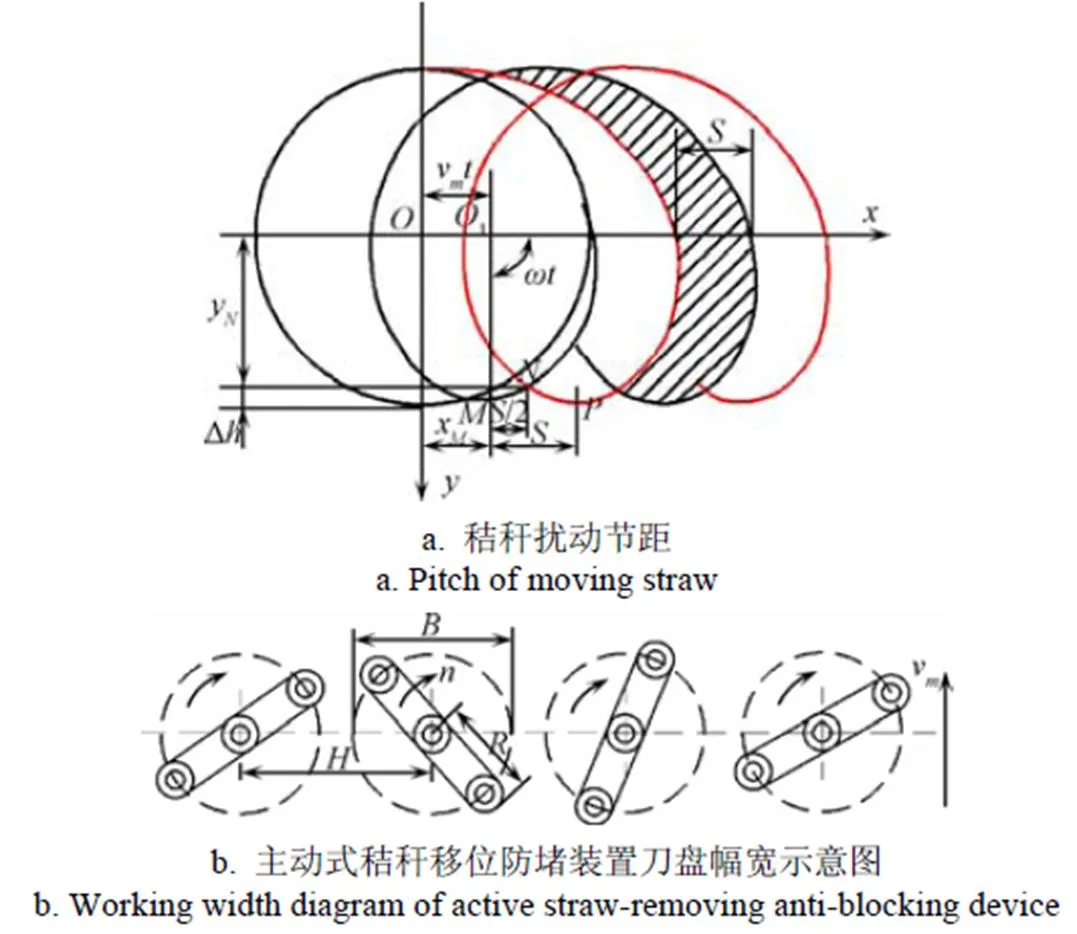
注:M为第一刀刃t时刻作业位置;N为2个刀刃作业重合位置;P为第二刀刃t时刻作业位置;B为刀盘幅宽,mm;S为秸秆扰动节距,mm;Δh为凸起高度,mm;H为播种行距,mm。
2.2 刀轴转速、回转半径、刀盘幅宽参数确定
麦茬田秸秆量大,为了不破坏土壤墒情且保证玉米播种质量,必须确保防堵装置将施肥、播种开沟器正前方的秸秆从作业行移位至苗床行间。为了使四行免耕玉米播种机(图4)在麦茬田全面作业,秸秆移位防堵装置刀盘位置参数应满足
同一个刀盘上安装2把立式刀片,则一周内两刀齿相继对秸秆的扰动间隔时间为π/,秸秆扰动节距为
其中刀盘每分钟的转速n=v/π。

从图4a可以看出π/2,则π/2,并将式(4) 代入式(6)并变换式(7)得
由方程(2)和方程(7)联合可得
令=,取≤2,其中为相邻刀盘的重叠量系数,则有

由方程式(11)可知,与成正比例关系,随着的减少而减少,从而秸秆扰动节距减小,由于覆盖秸秆属于无支撑多自由度群体,扰动节距越小,开沟器正前方作业行内的秸秆量越小。根据保护性耕作要求玉米播种时土壤扰动量越小,保墒效果越好,尽量确保主动式秸秆移位防堵装置刀刃不入土或浅入土。播种开沟实际垄形宽度为40~60 mm[17-19],侧位施肥法要求施肥开沟器与播种开沟器距离30~50 mm,为了同时保证播种和施肥开沟器的空间位置及开沟垄行宽度要求,故防堵装置回转半径取120 mm。结合农艺要求播种行距为600 mm,播种机作业速度取4 km/h。根据文献及对偶立式刀片安装刀盘的强度要求,系数不宜过小,故取1.5~1.8[20-23],则刀盘幅宽为216~240 mm,同时结合方程(4)、(11)可得速度比为2.9~3.5,则秸秆移位防堵装置刀轴转速为445~538 r/min。
3 离散元仿真分析
为了验证秸秆移位防堵装置结构参数和运动参数设计的合理性,运用离散元法进行主动式秸秆移位防堵装置作用下秸秆移位虚拟仿真试验。本文采用EDEM 2.6软件建立秸秆全覆盖土壤模型,为了能够准确地反映防堵装置移位秸秆的作业效果,首先需要确定离散元仿真参数。
3.1 离散元土壤接触模型与本征参数确定
接触模型是离散元法的重要基础,其实质是准静态下颗粒固体的接触力学弹塑性分析结果[24]。接触模型的分析计算直接决定了颗粒所受的力、力矩和位移的大小,对不同的仿真对象,须建立不同的接触模型,确保仿真结果的准确性。在离散元单元法中,颗粒在运动过程中主要受2种力作用,即自身重力mg,土壤-秸秆颗粒间或者秸秆颗粒与防堵装置法向碰撞接触力F、法向阻力F、切向碰撞接触力F、切向阻力F。根据牛顿第二运动定律,容易得到颗粒运动方程如式(12)所示。
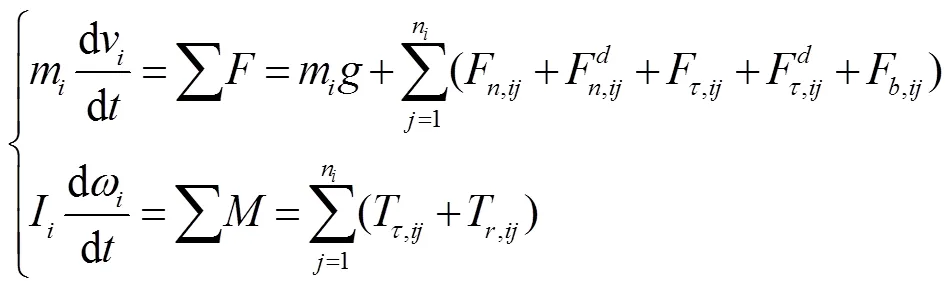
其中
式中I为颗粒的转动惯量,kg·m²;n为与颗粒的碰撞接触总数,Hz;v为颗粒的移动速度,m/s;T为颗粒受切向力形成的力矩,N·m;T为颗粒受到滚动力矩,N·m;F为颗粒法向结合力,N;A为颗粒接触面积,m2;k为黏附能量密度,kg/m3。
F根据秸秆颗粒是否有粘聚力进行设定。试验区土壤为砂姜黑土,具有散粒体物料特性,颗粒表面黏附力较小,且具有一定的压缩性,因此本研究设定土壤颗粒塑性变形的Hysteretic Spring接触模型和添加一个法向黏聚力的Linear Cohesion接触模型。土壤本征参数经测量及多数研究者在离散元土壤模型相关文献[25-26]可得如表1。
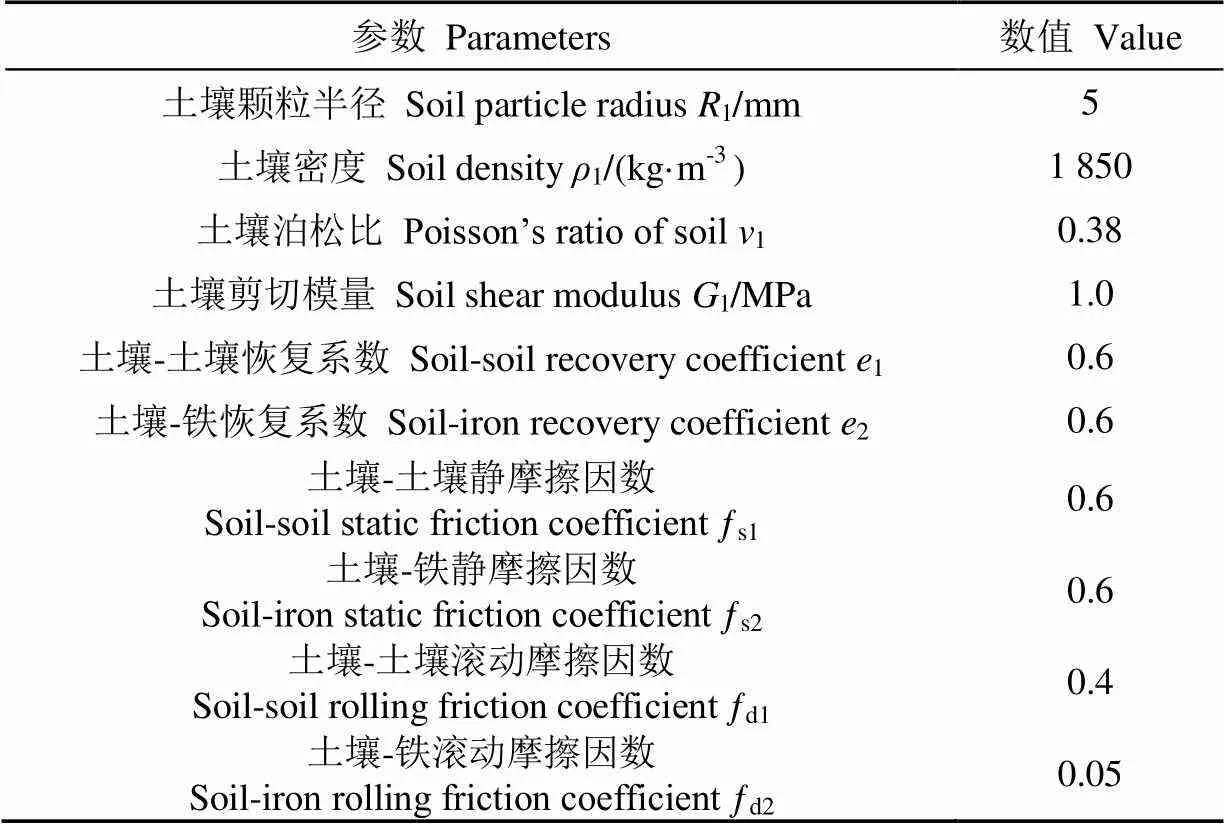
表1 土壤参数和接触参数
3.2 离散元秸秆接触模型与本征参数确定
通过扫描电子显微镜及傅里叶红外光谱测定小麦秸秆是一种典型的多相、筛状、不连续、不均匀、各向异性的复合材料,故仿真小麦秸秆难度较大。至今未见有运用商业离散元软件建立全方位柔性体秸秆模型的相关研究[27-28],本文采用EDEM中软球模型建立秸秆颗粒模型,其中软球颗粒的法向力简化为弹簧k和阻尼器C,切向力简化为弹簧k、阻尼器c和滑动摩擦器。选用10个半径为6 mm、球心间隔为14 mm组成的长为140 mm的长线性模型作为秸秆颗粒,如图5所示,每1节是具有刚度和阻尼的空心圆柱体连接2个圆球颗粒形成的。仿真过程中所使用的防堵装置参数及秸秆颗粒之间的恢复系数、静摩擦因素、滚动摩擦因素参照文献[29-32],如表2所示。

注:kn为秸秆颗粒模型的刚度,N·m-1;cn为秸秆颗粒模型的阻尼系数;μ为秸秆相邻颗粒模型的摩擦系数。
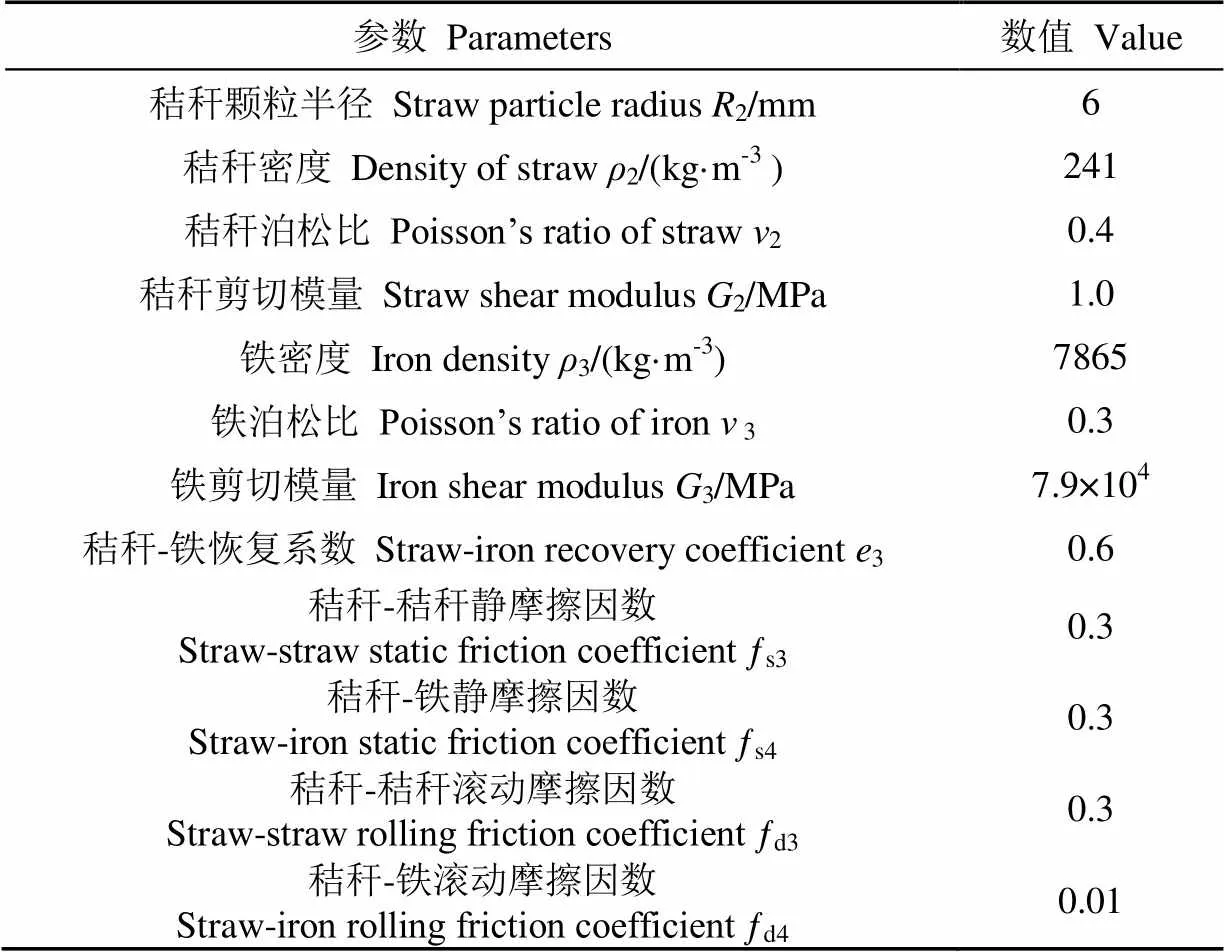
表2 秸秆参数和接触参数
3.3 土壤-秸秆-防堵装置几何模型的建立
通过对土壤-秸秆-防堵装置系统相互接触模型及仿真参数的测定,建立2 400 mm(长)×800 mm(宽)× 200 mm(高)离散元秸秆全覆盖土壤模型,为了减少土壤表层仿真秸秆与实际对应的覆盖秸秆密度的误差,虚拟秸秆覆盖土槽0~150 mm深度的耕作层土壤颗粒为随机排列;150~200 mm深度的秸秆颗粒采用随机(孔隙率12.5%)排列;仿真共生成250 000个土壤颗粒和4 000个秸秆颗粒。防堵装置采用65 Mn钢加工,选用“L”型立式刀片,为了减少覆盖秸秆下耕作层的土壤扰动量,达到保墒的目的,主动式秸秆移位防堵装置刀齿入土深度设为10 mm。结合上述秸秆移位防堵装置参数分析,应用UG/NX软件创建不同参数的防堵装置几何仿真模型,并将几何仿真模型导入EDEM中。仿真开始前,防堵装置位于系统模型的一端,图6所示为土壤-秸秆-防堵装置系统模型。
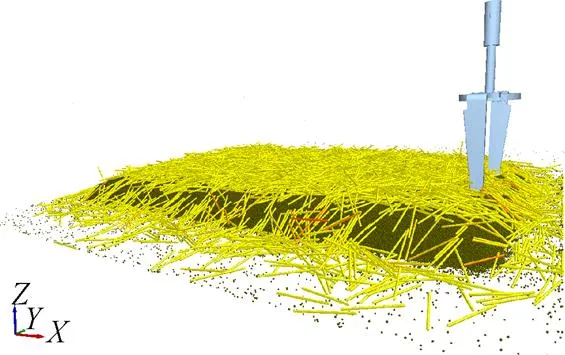
图6 土壤-秸秆-防堵装置系统模型
3.4 结果分析与讨论
利用建立的秸秆全覆盖土壤离散元模型对主动式秸秆移位防堵装置进行仿真试验。根据2.2节运动方程求解及后期整机设计中换向器传动比选型要求,仿真设置中对刀轴转速进行取整为500 r/min、回转半径为120 mm、刀盘幅宽216 mm、刀齿入土深度为10 mm、前进速度为4 km/h。通过导出防堵装置刀刃切向力、秸秆位移量、秸秆作用力及移位效果等指标,验证秸秆移位防堵装置结构参数和运动参数设计的合理性。在保证秸秆移位仿真过程中秸秆颗粒运动的连续性的前提下,设定仿真时间步长为3.5×10-3s,仿真总时间为6.5 s。
3.4.1 秸秆微观运动
全覆盖无支撑秸秆颗粒随机排列在土壤颗粒表层,每一时刻秸秆所受刀齿的切向力的EDEM仿真结果可以用来研究扰动过程中秸秆的运动轨迹。首先分析余摆运动的刀齿在50 mm深的秸秆颗粒中扰动作业时所受切向力如图7所示,刀刃所受切向力随时间变化呈出不规律的上下浮动,其切向力平均值为5.8 N。
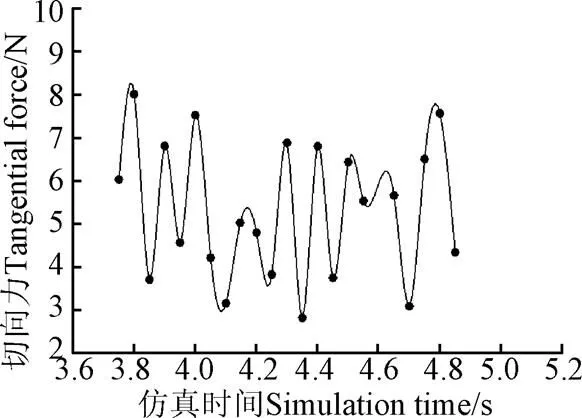
图7 50 mm深处刀刃所受切向力的时域曲线
为了更好地分析秸秆的运动轨迹,随机选取的3根秸秆颗粒(1号、2号、3号)在主动式秸秆移位防堵装置的扰动下运动,设定所有秸秆颗粒的初始位置为坐标原点,从图8a受力-时间曲线可以看出旋转刀刃的瞬间滑切扰动作用产生一个波峰力,随后秸秆颗粒移位脱离刀刃接触,作用力开始衰减至0左右,其中单根秸秆颗粒受力平均值为55.2×10-3N。从图8b位移-时间曲线图中可以看出秸秆位移在作用力0.2 s以后位移量瞬间突增,后来的飞溅运动靠自身的惯性,作用力消失后1.2 s左右,秸秆位移矢量值稳定在400~580 mm范围内,秸秆颗粒从作业行移位至苗床行间,符合农艺行要求。
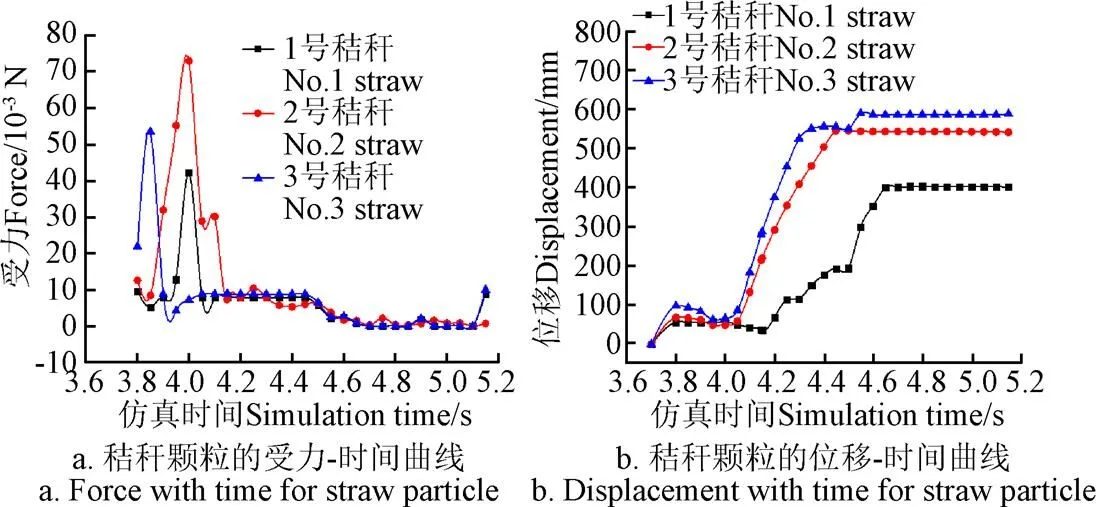
图8 防堵装置作业秸秆颗粒的运动分析
3.4.2 秸秆移位效果
仿真过程中秸秆受防堵装置刀齿作用力发生运动,不考虑秸秆被切断的情况。由于仿真时间0~3.65 s内,没有前进运动,装置处于下降调整入土深度运动。3.65 s后防堵装置开始作前进和回转耦合运动,秸秆颗粒开始发生位置变化,对回转区域内的约1 200根秸秆颗粒进行位移追踪,同时对作业区初始位置秸秆颗粒数和仿真结束后该位置秸秆颗粒数进行统计,设定作业区内初始位置秸秆颗粒数与被移至的秸秆颗粒数比值百分数为秸秆清秸率,则仿真试验统计在回转区域内秸秆清秸率达98.5%,同时对无秸区行宽进行随机采样测量取平均值为245.5 mm,符合无秸区开沟施肥、播种要求,故秸秆移位防堵装置的机构参数和运动参数设计可行。如图9所示不同时刻秸秆移位追踪效果图,随着防堵装置扰动前进出现一片无秸秆区域。
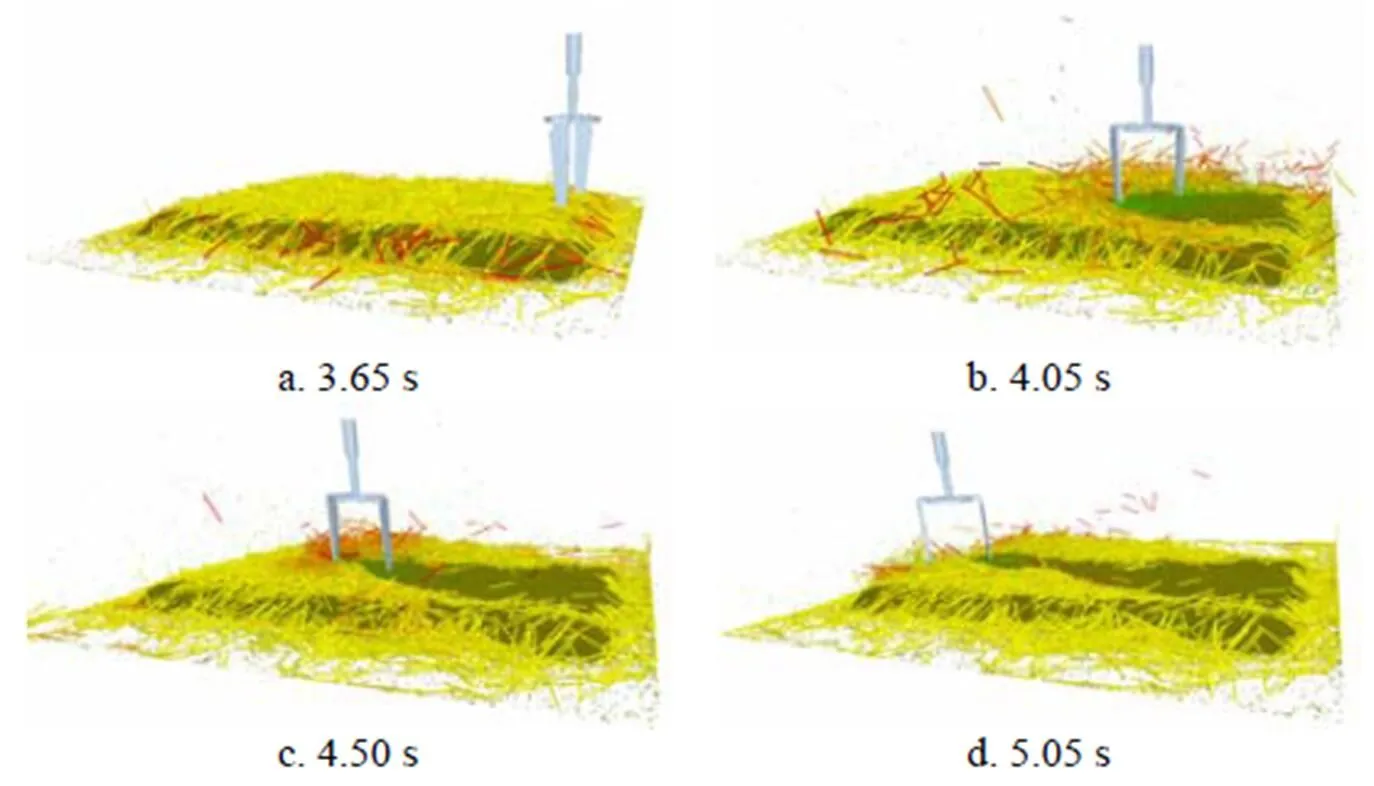
图9 不同仿真时刻秸秆移位效果图
4 田间试验
4.1 试验条件
田间试验选定安徽省宿州市现代农业示范园安徽农业大学皖北试验站进行试验。主要考核麦秸秆粉碎全量还田,秸秆留茬高度40 mm、秸秆覆盖量均值为1.24 kg/m2下玉米免耕播种防堵技术试验。将主动式秸秆移位防堵装置安装在2BMY-4型玉米免耕播种机机架上,整机作业幅宽2 400mm,作业效率为0.56 hm2/h。使用功率55 kW拖拉机进行田间试验,其中拖拉机后输出最高转速为720 r/min,其中换向器传动比为0.9,实际田间试验时实测作业转速可达到秸秆移位防堵需要刀轴转速为500 r/min的条件,开沟器深度为150 mm,机具的前进速度4 km/h。
4.2 试验方法
1)通过性
根据农业行业标准《免耕播种机质量评价技术规范》[33](NY/T1768-2009)及农业部农机鉴定总站免耕播种机性能检测要求,按照正常的作业速度前进,观察机具在作业过程中能否正常作业,记录机具停下来清茬的次数,本试验采用往返作业300 m为一组,共记录5组。并与传统玉米免耕直播机进行对比。
2)秸秆清秸率
秸秆清秸率的测定,利用五点取样法进行随机取样,选取秸秆移位装置作业区域测量作业前后每平方米地表覆盖的秸秆量,并称质量11、22。按照式(14)计算作业前后开沟器正前方测定区内秸秆清秸率[11]。
式中为秸秆清秸率,%;11为作业前单位面积秸秆总质量,kg/m2;22为作业后单位面积秸秆总质量,kg/m2。
4.3 试验对比结果与分析
4.3.1 通过性
相同试验条件下,使用安装主动式秸秆移位防堵装置的玉米免耕播种机进行田间作业,试验过程中未发现开沟器壅堵现象;对照组使用传统免耕播种机作业,在试验过程中开沟器一共出现8次壅堵并进行清茬工作。其中秸秆移位玉米免耕播种机田间作业前后效果如图10所示,通过田间试验验证秸秆移位防堵装置功能的可行性。

图10 主动式秸秆移位防堵装置作业前后秸秆覆盖效果
4.3.2 秸秆清秸率
为了减少覆盖秸秆下耕作层的动土量,达到保墒的目的,主动式秸秆移位防堵装置刀齿入土深度为10 mm。表4测定结果表明:采用加装秸秆移位装置的免耕播种机,秸秆清秸率平均值为90.21%,相比仿真减小8.29个百分点。
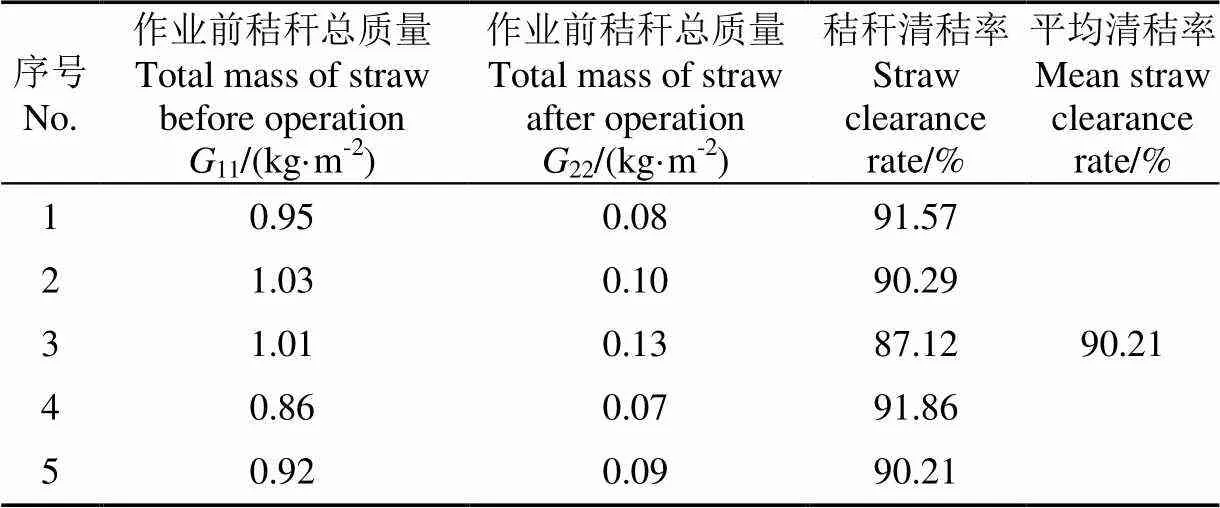
表4 秸秆清秸率测定结果
5 结论与讨论
本文基于“秸秆移位播种”作业思路,设计了麦茬秸秆全覆盖地玉米免耕播种开沟防堵装置,有效解决了传统玉米免耕播种在秸秆全覆盖地作业过程中出现开沟器壅堵、架种和晾种等问题。
1)运用EDEM软件建立了土壤-秸秆-防堵装置系统模型,设定刀轴转速为500 r/min,回转半径为120 mm,刀盘幅宽为216 mm,秸秆移位玉米免耕播种机防堵装置刀齿入土深度为10 mm,通过分析秸秆微观运动和秸秆移位效果,检验了刀轴工作转速、回转半径和刀盘幅宽等参数设计的合理性。
2)田间试验表明,留茬高度40 cm、覆盖量1.24 kg/m2的小麦秸秆全覆盖田,使用主动式秸秆移位防堵装置的2BMY-4型玉米免耕播种机作业,未发生堵塞现象,通过性良好,秸秆平均清秸率90.21%,较仿真结果低8.29个百分点。
本研究可解决麦玉轮作区麦茬秸秆全量还田下玉米免耕播种通过性提供可行性方案,影响秸秆移位免耕播种通过性能的因素较多,如刀轴转速、回转半径及驱动装置类型等,本研究建立的仿真模型是在小麦秸秆全覆盖地某一特定的刀轴转速、驱动装置类型和回转半径条件下构建的,需进一步探究最佳组合参数。不同作物秸秆全覆盖地免耕防堵要求不一,需要根据农业生产实际进行调节。
[1] 高焕文,李洪文,姚宗路. 我国轻型免耕播种机研究[J].农业机械学报,2008,39(4):78-82.
Gao Huanwen, Li Hongwen, Yao Zonglu. Study on the Chinese light no-till seeders[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(4): 78-82. (in Chinese with English abstract)
[2] He Jin, Li Hongwen, Wang Xiaoyan, et al. The adoption of annual subsoiling as conservation tillage in dryland maize and wheat cultivation in northern China[J]. Soil and Tillage Research, 2007, 94(2): 493-502.
[3] 刘立晶,高焕文,李洪文. 玉米-小麦一年两熟保护性耕作体系试验研究[J]. 农业工程学报,2004,20(3):70-73.
Liu Lijing, Gao Huanwen, Li Hongwen. Conservation tillage for corn-wheat two crops a year region[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(3): 70-73. (in Chinese with English abstract)
[4] 廖庆喜,高焕文,舒彩霞. 免耕播种机防堵技术研究现状与发展趋势[J]. 农业工程学报,2004,20(1):108-112.
Liao Qingxi, Gao Huanwen, Shu Caixia. Present situations and prospects of anti-blocking technology of no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 108-112. (in Chinese with English abstract)
[5] 杨丽,张瑞,张东兴,等. 防堵和播深控制机构提高玉米免耕精量播种性能[J]. 农业工程学报,2016,32(17):18-23.
Yang Li, Zhang Rui, Zhang Dongxing, et al. Row cleaner and depth control unit improving sowing performance of maize no-till precision planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 18-23. (in Chinese with English abstract)
[6] 顾峰玮,胡志超,陈有庆,等. “洁区播种”思路下麦茬全秸秆覆盖地花生免耕播种机研制[J]. 农业工程学报,2016,32(20):15-23.
Gu Fengwei, Hu Zhichao, Chen Youqing, et al. Developmentand experiment of peanut no-till planter under full wheat strawmulching based on “clean area planting”[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of theCSAE), 2016, 32(20): 15-23. (in Chinese with English abstract)
[7] 王庆杰,李洪文,何进,等. 凹形圆盘式玉米垄作免耕播种机的设计与试验[J]. 农业工程学报,2011,27(7):117-122.
Wang Qingjie, Li Hongwen, He Jin, et al. Design and experiment on concave disc type maize ridge-till and no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 117-122. (inChinese with English abstract)
[8] 贾洪雷,赵佳乐,姜鑫铭,等. 行间免耕播种机防堵装置设计与试验[J]. 农业工程学报,2013,29(18):16-25.
Jia Honglei, Zhao Jiale, Jiang Xinming, et al. Design and experiment of anti-blocking mechanism for inter-row no-tillage seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(18): 16-25. (in Chinese with English abstract)
[9] 王庆杰,何进,李洪文,等. 免耕播种机开沟防堵单元体设计与试验[J]. 农业工程学报,2012,28(1):27-31.
Wang Qingjie, He Jin, Li Hongwen, et al. Design and experiment on furrowing and anti-blocking unit for no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(1): 27-31. (in Chinese with English abstract)
[10] 何进,李洪文,李慧,等. 往复切刀式小麦固定垄免耕播种机[J]. 农业工程学报,2009,25(11):133-138.
He Jin, Li Hongwen, Li Hui, et al. No-till planter with reciprocating -cutter for wheat permanent raised beds cultivation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 133-138. (in Chinese with English abstract)
[11] 张喜瑞,李洪文,何进,等. 小麦免耕播种机防堵装置性能对比试验[J]. 农业机械学报,2010,41(2):73-77.
Zhang Xirui, Li Hongwen, He Jinm, et al. Comparative experiment on anti-blocking mechanism for wheat no-till planter[J]. Transactionsof the Chinese Society for Agricultural Machinery, 2010, 41(2): 73—77. (in Chinese with English abstract)
[12] 赵旭,张祖立,唐萍,等. 被动式倾斜波纹圆盘破茬刀工作性能试验[J]. 农业机械学报,2011,42(1):64-67.
Zhao Xu, Zhang Zuli, Tang Ping, et al. Behavior ofpassive stubble-cutting disc with oblique ripples[J]. Transactions of the Chinese Society for AgriculturalMachinery, 2011, 42(1): 64-67. (in Chinese withEnglish abstract)
[13] 赵佳乐,贾洪雷,郭明卓,等. 免耕播种机有支撑滚切式防堵装置设计与试验[J]. 农业工程学报,2014,30(10):18—28.
Zhao Jiale, Jia Honglei, Guo Mingzhuo, et al. Design and experimentofsupported roll-cuttinganti-blocking mechanismwith for no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2014, 30(10): 18-28. (in Chinese with English abstract)
[14] 王汉羊,陈海涛,纪文义. 2BMFJ-3 型麦茬地免耕精播机防堵装置[J]. 农业机械学报,2013,44(4):64-70.
Wang Hanyang, Chen Haitao, Ji Wenyi. Anti-locking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields[J].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese with English abstract)
[15] 高娜娜,张东兴,杨丽,等. 玉米免耕播种机滚筒式防堵机构的设计与试验[J]. 农业工程学报,2012,28(12):31-37.
Gao Nana, Zhang Dongxing, Yang Li, et al. Design andexperiment of drum-type anti-blocking mechanism of no-tillplanter for maize[J]. Transactions of the Chinese Society ofAgricultural Engineering (Transactions of the CSAE), 2012, 28(12): 31-37. (in Chinese with English abstract)
[16] 蒋金琳,龚丽农,王东伟,等. 免耕播种机双刀盘有支撑切茬破茬装置的研制与试验[J]. 农业工程学报,2012,28(21):17-22.
Jiang Jinlin, Gong Linong, Wang Dongwei, et al. Development and experiment for driving double coulters anti-blockage device of no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(21): 17-22. (in Chinese with English abstract)
[17] 林静,李博,李宝筏,等. 阿基米得螺线型缺口圆盘破茬刀参数优化与试验[J]. 农业机械学报,2014,45(6):100-104.
Lin Jing, Li Bo, Li Baofa, et al. Parameter optimization and experiment on archimedes spiral type gap cutting disc[J]. Transactions of the Chinese Society for AgriculturalMachinery, 2014, 45(6): 100-104. (in Chinese with Englishabstract)
[18] 杨自栋,刘宁宁,耿端阳,等. 2BYM-12型折叠式动力防堵免耕播种机设计与试验[J]. 农业机械学报,2013,44(增刊1):46-50.
Yang Zidong, Liu Ningning, Geng Duanyang, et al. Design and experiment on type 2BYM-12 folding and dynamic anti-locking no-ill planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 46-50. (in Chinese with English abstract)
[19] 卢彩云,李洪文,何进,等. 小麦免耕播种机浮动支撑式防堵装置[J]. 农业机械学报,2013,44(12):52-55,153.
Lu Caiyun, Li Hongwen, He Jin, et al. Floated supportanti-blocking device of wheat no-till seeder[J]. Transactionsof the Chinese Society for Agricultural Machinery, 2013, 44(12): 52-55, 153. (in Chinese with English abstract)
[20] 卢彩云,赵春江,孟志军,等. 基于滑板压秆旋切式防堵装置的秸秆摩擦特性研究[J]. 农业工程学报,2016,32(11):83-89.
Lu Caiyun, Zhao Chunjiang, Meng Zhijun, et al. Straw friction characteristic based on rotarycutting anti-blocking device with slide plate pressing straw[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(11): 83-89. (in Chinese with English abstract)
[21] 中国农业机械化科学研究院. 农业机械设计手册(上册)[M]. 北京:中国农业科学技术出版社,2007:288-299.
[22] 林静,宋玉秋,李宝筏. 东北垄作区机械免耕播种工艺的研究[J]. 农业工程学报,2014,30(9):50-57.
Lin Jing, Song Yuqiu, Li Baofa. Mechanical no-tillage sowing technology for northeast ridge area in China[J]. Transactions of the Chinese Society of AgriculturalEngineering (Transactions of the CSAE), 2014, 30(9): 50-57. (in English with Chinese abstract)
[23] 林静,钱巍,牛金亮. 玉米垄作免耕播种机新型切拨防堵装置的研究与试验[J]. 沈阳农业大学学报,2015,46(6):691-698.
Lin Jing, Qian Wei, Niu Jinliang. Design and experiment of stubble-cutting and anti-blocking mechanism for ridge-till and no-till planter[J]. Journal of Shenyang Agricultural University, 2015, 46(6): 691-698. (in Chinese with English abstract)
[24] 郑侃,何进,李洪文,等. 基于离散元深松土壤模型的折线破土刃深松铲研究[J].农业机械学报,2016,47(9):62-67.
Zheng Kan, He Jin, Li Hongwen, et al. Research on polyline soil-breaking blade subsoiler based onsubsoiling soil model using discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 62-67. (in Chinese with English abstract)
[25] 方会敏,姬长英,张庆怡,等. 基于离散元法的旋耕刀受力分析[J]. 农业工程学报,2016,32(21):54-59.
Fang Huimin, Ji Changying, Zhang Qingyi, et al. Force analysis of rotary blade based on distinct element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(21): 54-59. (in Chinesewith English abstract)
[26] 方会敏,姬长英,AHMED Ali Tagar,等. 秸秆土壤旋耕刀系统中秸秆位移仿真分析[J]. 农业机械学报,2016,47(1):60-67.
Fang Huimin, Ji Changying, AHMED Ali Tagar, et al. Simulation analysis of straw movement in straw soil rotary blade system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 60-67. (in Chinese with English abstract)
[27] 于建群,钱立彬,于文静,等. 开沟器工作阻力的离散元法仿真分析[J]. 农业机械学报,2009,40(6):53-57.
Yu Jianqun, Qian Libin, Yu Wenjing, et al. DEM analysis ofthe resistance applied on furrow openers[J]. Transactions ofthe Chinese Society for Agricultural Machinery, 2009, 40(6): 53-57. (in Chinese with English abstract)
[28] Tagar A A, JiChangying, Jan A, et al. Finite element simulation of soil failure patterns under soil bin and field testing conditions[J]. Soil & Tillage Research, 2015, 145: 157-170.
[29] Ucgul M, John M F, Chris S. Three dimensional discrete element modeling of tillagedetermination of a suitable contact modeland parameters for a cohesionless soil[J]. Biosystems Engineering, 2014, 121: 105-117.
[30] Mari I A, Chandio F A, Ji Changying, et al. Performance and evaluation of disc tillage tool forces acting on straw incorporation soil[J].Pakistan Journal of Agricultural Sciences, 2014, 51: 1-6.
[31] Liu J, Chen Y, Kushwaha R L. Effect of tillage speed and straw length on soil and straw movement by a sweep[J]. Soil & Tillage Research, 2010, 109(1): 9-16.
[32] Lenaerts B, Aertsen T, Tijskens E, et al. Simulation of grain-straw separation by discrete element modeling with bendable strawparticles[J]. Computers and Electronics in Agriculture, 2014, 101: 24-33.
[33] 中华人民共和国农业行业标准. 免耕播种机质量评价技术规范:NY/T1768-2009[S]. 北京:中华人民共和国农业部,2009.
Design and experiment of active straw-removing anti-blocking device for maize no-tillage planter
Wang Weiwei, Zhu Cunxi, Chen Liqing, Li Zhaodong, Huang Xin, Li Jincai※
(230036,)
Conventional farming methods with multiple operations by multiple types of machinery may lead to serious shallow soil hardening and cost increases for wheat-maize rotation cropping areas in Huang-Huai-Hai Plain of China. In addition, there are several technical problems for the traditional maize no-tillage planter when seeding in the fields covered by heavy wheat straw, 1) soil-buried parts of the no-tillage planter are easy to be blocked by the wheat straw, which cannot guarantee the smooth operation; 2) the seeds may be improperly planted on the top of wheat straw since the soil is totally covered by the wheat straw; 3) the germinated seeds cannot grow up normally as no soil covered, which result in production declines. In the current study, an active anti-blocking device was designed for the maize no-till planter for removing wheat straw that covered on the soil surface. During seeding in the field, the wheat straw that covered on the surface was disrupted and thrown into the air by the device and was transferred backward before it landed. Then, the planter would ditch, fertilize and seed in the cleaned field produced by the device. At the last, the smashed straw was evenly covered on the fields after planting. The structural parameters and motion parameters of the anti-blocking device were determined based on a simulation model built by the discrete element method (DEM). The model was composed of soil, full-coverage straw, and device, which can be used to simulate the process of removing the unsupported straw from the soil surface. The model and interaction system was established in EDEM 2.6 simulation environment, and their physical properties were calibrated with the real properties of lime concretion black soil and wheat straw. According to theoretical design to set simulation parameters, the radius of the cutter head was set to 120 mm, the driving speed of the cutter shaft was set to 500 r/min, and the depth of the cutting edge was set to 10 mm, the operating velocity of the active anti-blocking device was set to 4 km/h.The simulation experiment was used to analyze the displacement and the clearance rate of straw for selecting suitable structural parameters and motion parameters for design. The simulation results indicated that the tangential force of the cutting edge was irregularly fluctuating with time, and the average tangential force was 5.8 N; the straw clearance rate was 98.5% in the disrupted zone, the average width of the area without straw was 245.5 mm according to the random sampling, which was in accordance with the requirement of ditching, fertilizing, and seeding. The field experiment was carried out by a straw-removing maize no-tillage planter with the designed anti-blocking device mounted, for ditching, fertilizing and seeding, within a field covered by 1.24 kg/m2wheat straw with stubble height of 40 mm. The planter was hauled by a high-power tractor of over 55 kW with an operating velocity of 4 km/h and a working width of 2 400 mm, resulting in a pure productivity of more than 0.56 hm2/h. The field experiment and measurement results showed that the straw-removing no-tillage planter with an active anti-blocking device had a stable operation that can significantly improve the seeding environment. The number of clear straw was 0, the straw clearance rate was 90.21%, and reduced by 8.29 percentage points compared with the simulated value. This study illustrated that the maize no-tillage planter with active anti-blocking device was suitable for removing the covering straw, cleaning the seedbed, fertilizing, and covering the seedbed with wheat straw. Meanwhile, the research provides a reference for the design and extending of the no-tillage planter for the fields with full coverage of straw.
mechanization; design; computer simulation; straw-removing; discrete element method; straw-cover field; no-tillage seeding; active anti-blocking
10.11975/j.issn.1002-6819.2017.24.002
S224.29
A
1002-6819(2017)-24-0010-08
2017-07-11
2017-11-01
公益性行业(农业)科研专项(201503136);“十三五”国家重点研发计划课题(2017YFD0300408、2017YFD0301307);研究生创新基金项目(2017yjs-42)
王韦韦,博士生,主要研究方向为保护性耕作技术与机具。Email:wangww0618@163.com
李金才,教授,博士生导师,主要从事作物栽培及秸秆还田理论与技术研究。Email:ljc5122423@126.com
王韦韦,朱存玺,陈黎卿,李兆东,黄 鑫,李金才. 玉米免耕播种机主动式秸秆移位防堵装置的设计与试验[J]. 农业工程学报,2017,33(24):10-17. doi:10.11975/j.issn.1002-6819.2017.24.002 http://www.tcsae.org
Wang Weiwei, Zhu Cunxi, Chen Liqing, Li Zhaodong, Huang Xin, Li Jincai. Design and experiment of active straw-removing anti-blocking device for maize no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 10-17. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.24.002 http://www.tcsae.org
