三相微网逆变器并联运行的新型三环控制策略
2018-01-09杨赵倩于少娟
杨赵倩,于少娟
(太原科技大学 电子信息工程学院,太原 030024)
三相微网逆变器并联运行的新型三环控制策略
杨赵倩,于少娟
(太原科技大学 电子信息工程学院,太原 030024)
针对微电网的孤岛运行状态,非线性负载产生的谐波电流扰动和滤波参数摄动会严重影响逆变器输出电压的稳定性以及不同额定容量微源逆变器并联运行难以实现负荷功率的精确分配。在三相桥式逆变器的基础上,提出了一种新的三环控制策略,包括滑模电压内环、虚拟阻抗环和功率外环。最后,在理论分析的基础上,进行MATLAB/simulink仿真,验证了该控制策略能够降低输出电压的抖振和谐波畸变率,抵御滤波参数摄动,并且使逆变器满足功率分配的要求。
三相桥逆变器;自适应滑模;下垂控制;虚拟阻抗
近年来,随着能源危机和环境问题的日益严重,分布式电源越来越受到各个国家的关注并且得到了高速发展。微电网是一组由分布式电源、负荷、能量存储设备、控制装置构成的系统单元,是一个能够实现自我控制、保护和管理的自治系统,既可以与大电网并网运行,也可以独立运行[1]。
当微电网运行于孤岛模式时,失去了稳定的电源,就需要微电网内部的电源承担主电源的任务,给微电网提供稳定的电压和频率[2]。非线性负载产生的谐波电流是逆变器系统的外部扰动,滤波参数摄动作为内部扰动会影响滤波器的精度以致影响控制器与被控对象的零极点对消程度,并且不同额定容量的逆变器并联运行难以实现功率精确分配。因此,需要设计一种控制器来确保孤岛运行情况下,微网逆变器输出电压具备较强的稳定性及鲁棒性,并且能按自身额定功率成比例分担负荷[3]。
文献[4]设计了一种改进的下垂控制方法,缓解了谐波注入的不利影响,但受线路阻抗影响,参数选取困难。文献[5]采用传统PID控制时,在电压控制环内增加了滤波电感电流比例反馈环节,系统需要添加电感电流传感器,设计成本有待降低。文献[6]针对扰动难以估计的系统,采用自适应算法来预测扰动边界值,证明滑模面是渐进稳定的。文献[7]对单相LC滤波H桥逆变器运用了自适应滑模控制策略,但没有考虑不同额定容量逆变器并联运行的情况。
针对上述问题,本文在文献[8]的基础上,对三相LC滤波且不同额定容量的逆变器并联运行的控制策略进行研究。在传统滑模(SMC)的基础上,对SMC输入电压控制切换项的切换增益以及滤波参数进行自适应计算,在保证控制系统稳定性的前提下,能够限制输出电压的抖振,同时降低输出电压的稳态跟踪误差;针对不同的功率等级设计虚拟阻抗反馈系数,使逆变器输出阻抗成阻性并满足功率分配要求;在传统的下垂控制中引入暂态下垂项,提高逆变器动态性能。
1 孤岛微电网逆变器控制结构
图1中,i、ic、i0分别是滤波电感、滤波电容、负载的电流;Uinv、uO分别是在一个开关周期中,逆变器和滤波电容的平均输出电压;Lf、LC分别是滤波电感和滤波电容;Rf是滤波电感的寄生电阻;Lg、Cg分别是网端线路的电感和电阻;ZL为非线性负载;upcc是PCC端电压;E*、ω*分别是下垂控制参考电压的幅值和角频率;ur为逆变器输出参考电压;uin为逆变器输入控制电压;udc为微电源输出的直流电。不考虑逆变器增益以及逆变器输出电压的非基波成分,uinv也可被视为电压控制器输出,即uin.
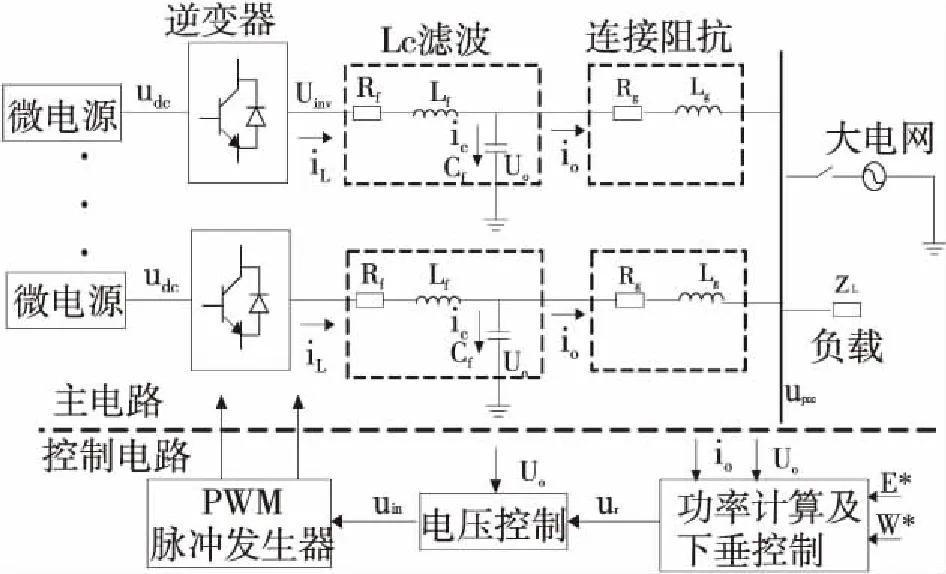
图1 孤岛微电网逆变器控制结构框图
Fig.1 The control structure of the inverter in the isolated island microgrid
2 控制方法
2.1 改进下垂控制
由于本文的微电网呈现低压特性,为了消除有功功率和无功功率之间的耦合,在P/V下垂控制的基础上展开研究。
uon和ion相乘,再经过一个低通滤波器就能得到平均有功功率Pn;uon延迟90°乘以ion,再经过一个低通滤波器就能得到平均无功功率Qn.
可表示为:
(1)
由于在计算平均功率时引入了滤波器,为了避免对系统造成一定的延时,对下垂控制方程进行修正得:

(2)

(3)
其中,nc、mc分别为有功、无功的下垂系数;ncd、mcd分别为其微分下垂系数。根据下垂控制得到逆变器的参考输出电压ur的电压幅值En和角速度ωn,因此,ur可表示为:
ur=Ensin(ωnt)
(4)
2.2 自适应滑模控制
2.2.1 自适应率的设计原则
三相逆变器取单相LC滤波侧进行研究。在单个开关周期中,其动力学方程为:

(5)
将式(5)变为:
(6)

若d=0且h1、h2已知无摄动,得:
(7)
式中,kp、ki为滑模面控制参数。
将式(7)代入式(6),则逆变器的动力学方程为:
(8)
但是实际的逆变器系统d≠0,h1、h2存在摄动,采用式(7)的控制率难以达到式(8)的控制效果。因此,本文对非线性负载[9]电流扰动和滤波参数摄动分别设置自适应律,降低负载电流对滤波环节的扰动,提高系统建模精度。
2.2.2 滤波参数自适应律的设计
本文设计了三阶滑模面,如下:
(9)
对其求导,得式(10):

(10)
设计如下控制率:
(11)
(12)
γ1、γ2分别为h1、h2的自适应系数,为正常数。
为了验证由式(11)、(12)组成的滑模系统的稳定性,引入了李雅普诺夫函数:
(13)

对式(13)求导,得式(14):

(14)
把式(10)、(12)代入式(14),可得:

(15)

2.2.3 开关增益自适应律的设计
控制输入信号开关项的不连续性是抖振产生的根本原因。自适应开关增益[10]的引入能够实时预测与i0相关的外部扰动的边界值,不仅完全抵消了外部扰动的影响,而且还极大地降低了控制输入信号的抖振。
开关增益的自适应算法表达如下:

(16)



(17)
2.2.4 电压内环控制框图介绍及稳定性分析
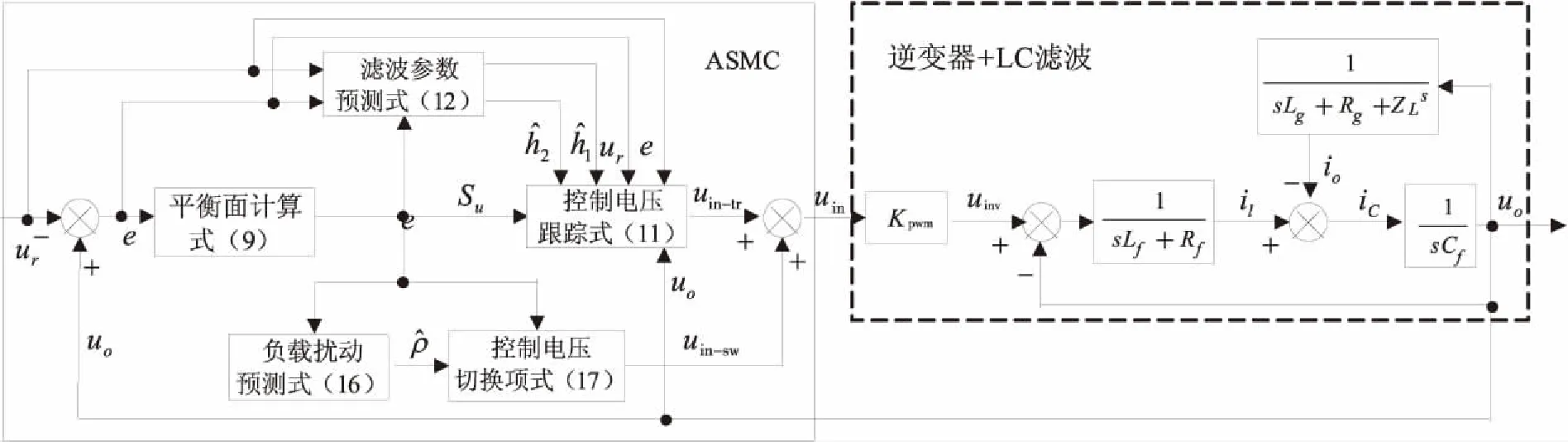
图2 基于自适应滑模的电压闭环控制框图
Fig.2 Adaptive sliding mode inverter control block diagram
为了验证式(9)所示滑模面的全局渐进鲁棒性,引入了如下的李雅普诺夫函数:


(18)

对V2求导,并且把式(14)-(16)考虑在内,得式(19):
kddt-ρtSut≤0
(19)

定义如下函数:
(20)
对式(20)积分,得式(21):

(21)

(22)
M1∈[0,)是均匀连续的。由 Barbale引理[13],可以推出:limt→M1t=0.该结果表明:当t→时,Su→0.由此可得,本文所提出的控制系统的全局渐进稳定性得到保证。
2.3 虚拟阻抗环的设计
两逆变器并联运行的简易模型如图3.其中,E1,E2,U分别为逆变器1、2和交流母线电压有效值;φ1,φ2分别为逆变器1、2输出电压与交流母线电压的相角差;jX1+r1,jX2+r2分别为逆变器1、2的等效输出阻抗与线路阻抗之和;jX+R为交流母线端输出阻抗。
低压微网中,逆变器等效输出阻抗[12]为阻性,当两个微源逆变器并联运行时,逆变器输出的有功、无功功率为式(23):

(23)
(24)

图3 两逆变器并联运行的简易模型
Fig.3Asimplemodelofparalleloperationoftwoinverters
其中,两逆变器输出幅值Ei,相位φi相差不大,可得

(25)

(26)
由此可得,逆变器实现功率分配必须满足式(27):

(27)
其中,KVA表示功率等级,∠Z表示等效输出阻抗角。
在滑模电压内环控制的基础上,对不同功率等级的逆变器设置不同的虚拟阻抗反馈系数,使逆变器满足上述功率分配的需求。其控制结构如图4所示。

图4 逆变器控制结构
Fig.4Invertercontrolstructure
此时逆变器的闭环等效方程为:
u0=ur-Rdio-Zosio=ur-Zo*sio
(28)
其中,Rd是虚拟阻抗反馈系数,Zo*s=Zos+Rd是新的等效输出阻抗,ur是开环时逆变器的输入参考电压。在低压微网中,由于线路的阻抗性质,Rd通常取3~5倍线路阻抗。
3 仿真分析
两个有LC滤波且额定容量不同的三相桥式逆变器并联孤岛运行,接非线性负载,仿真步长为2 μs.仿真结果均取A相进行说明。
1)为了评估运行于孤岛状态下的逆变器自适应滑模控制(ASMC)效果,对PID控制、传统滑模控制(CSMC)和ASMC三者之间的仿真结果进行比较。
当参考电压幅值在0.265 s由300 V变到200 V时,单个逆变器在三种不同方式控制下,滤波电容电压分别如图5.
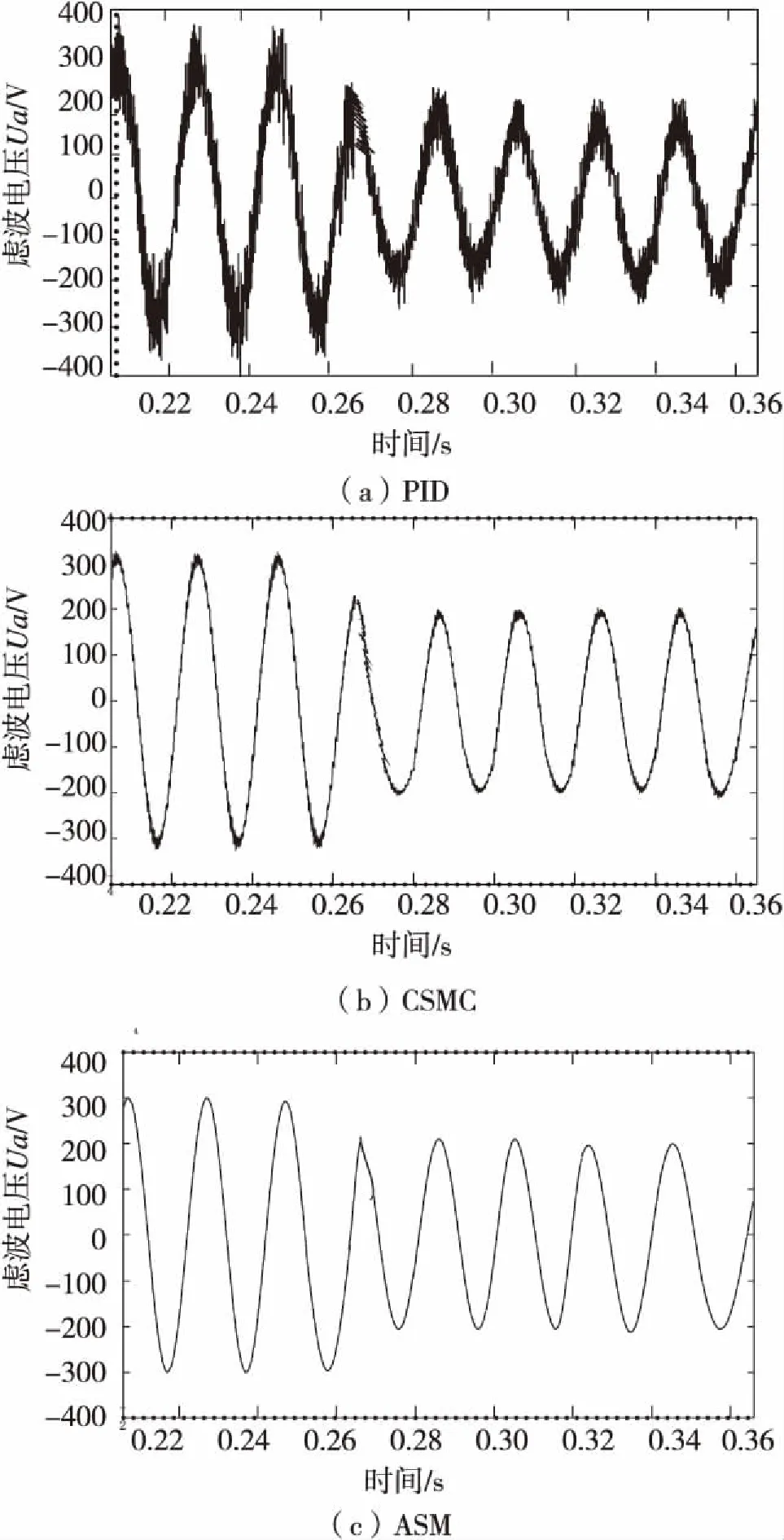
图5 参考电压发生变化时在三种不同控制方式下的滤波电容电压
Fig.5 The filter-capacitor voltages using different voltages controllers during reference- voltage transient
由图5看出,使用PID控制方法,滤波电容电压对参考电压的跟踪能力差,滤波电容电压的谐波畸变率(THD)高达9%;在CSMC的控制方式下,有一个良好的跟踪特性,但输出电压受到控制输入信号的抖振的影响,THD降至3.2%;在ASMC的控制方式下,系统具有较高的稳定性和动态性能,THD仅有0.13%.
2)考虑到在大多数实际情况下滤波电感在标称值的-50%到+50%之间波动,三种电压控制方式的抗摄动能力如图6所示。

图6 当滤波电感在标称值的-50%到+50%范围变化时,在三种不同的控制方式下滤波电容电压
Fig.6 The filter-capacitor voltages using different voltage controllers in the case of filter inductance varying from 50% to 50% of nominal values
由图看出,PID控制器不具备抗摄动能力;CSMC系统的抗摄动能力依赖于滤波电感的辨识精度,当滤波电感由标称值的-30%变化到-50%时,抗摄动能力严重恶化;ASMC系统具有较高的抗摄动能力。
3)两台逆变器并联运行,且第二台逆变器是第一台逆变器容量的2倍,负荷电流及两台逆变器的输出电流如图7.
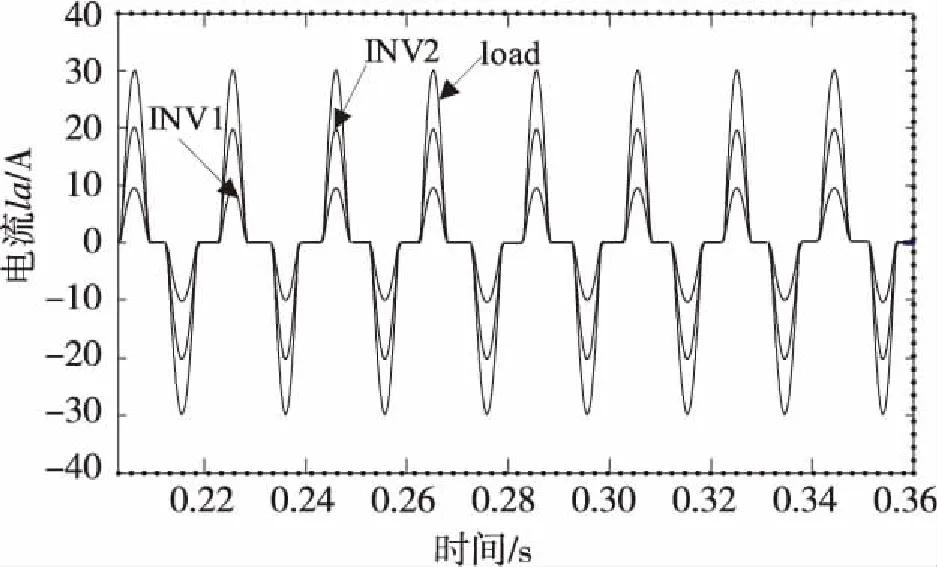
图7 负荷电流及逆变器输出电流
Fig.7 Load current and output current of inverter
由图看出,逆变器2输出的电流是逆变器1输出电流的两倍且负荷电流为两台逆变器输出电流之和。由此可以验证,两台不同容量的逆变器并联运行,可以实现成比例的分担负荷功率。
4 结 论
本文提出了一种三相桥式逆变器并联运行于孤岛状态下的非线性电压控制器。ASMC系统的全局渐进稳定性用李雅普诺夫第二法得到了严格的证明。对开关增益和滤波参数分别进行自适应设计,限制输出电压抖振,提高系统的抗摄动能力;虚拟阻抗环的设计,使逆变器的等效输出阻抗为阻性,并且满足功率分配的要求;改进的下垂控制项,有效提高了系统的动态性能。仿真结果表明,本文设计的三环控制系统使滤波输出电压有很强的稳态跟踪能力,对滤波电感摄动有很好的抑制能力以及精确分配功率的能力。
[1] LUO AN, CHEN YANDONG, SHUAI ZHIKANG, et al. An Improved Reactive Current Detection And Power Control Method For Single-phase Photovoltaic Grid-connected DG System[J]. IEEE Transactions Energy Convers,2013, 28(4):823-831.
[2] 张庆海, 彭楚武, 陈燕东, 等. 一种微电网多逆变器并联 运行控制策略[J]. 中国电机工程学报,2012, 32(25): 126-132.
[3] ROCABERT J, LUNA A, BLAABJERG F,et al. Control Of Power Converter In AC Microgrids[J]. IEEE Power Electron, 2012, 27(11): 4734-4749.
[4] 苏虎, 曹炜, 孙静, 等. 基于改进下垂控制微网协调控制策略[J]. 电力系统保护与控制,2014, 42(11): 94-98.
[5] JING X J, CHENG L. An Optimal Pid Control Algorithm For Training Feedforward Neural Networks[J]. IEEE TransactionsOn Industrial Electronics, 2013, 60(6): 2273-2283.
[6] 李晓理, 刘德馨, 贾超, 等. 基于自适应动态规划算法的多设定值跟踪控制方法研究[J]. 控制理论与应用, 2013, 30(6): 709-716.
[7] ZHIYONG CHEN, AN LUO, HUAJUN WANG, et al. Adaptive Sliding-Mode Voltage Control For Inverter Operating In Islanded Mode In Microgrid[J]. Electrical Power And Energy Systems, 2015(66): 133-143.
[8] WU ZHAOJING, XIA YUANQING, XIE XUEJUN. Stochastic Barbalat’s Lemma And Its Applications[J]. IEEE Transactions Automatic Control, 2012, 57(6): 1537-1543.
[9] 陈刚. 不确定非线性系统的鲁棒自适应控制研究[D]. 杭州:浙江大学, 2006.
[10] 张明锐, 杜志超, 王少波. 微网中下垂控制策略及参数选择研究[J]. 电工技术学报, 2014, 29(2): 136-144.
[11] ABRISHAMIFAR ADIB, AHMAD AHMAD ALE, MOHAMADIAN MUSTAFA. Fixed Switching Frequency Sliding Mode Control For Single-Phase Unipolar Inverters[J]. IEEE Transactions Power Electron, 2012, 27(5): 2507-2514.
[12] EZZAT M, DE LEON J, GONZALEZ N,et al. Sensorless Speed Control Of Permanent Magnet Synchronous Motor By Using Sliding Mode Observer[C] //Preceedings Of The 11th Nternational Workshop On Variable Structure Systems (VSS), Toulouse, France, 2010, 227-232.
NovelThreeLoopControlStrategyforParallelOperationofThree-phaseMicro-gridInverter
YANG Zhao-qian, YU Shao-juan
(School of Electronics Information Engineering,Taiyuan University of Science and Technology, Taiyuan 030024, China)
For island microgrid, harmonic current disturbance and filter parameter perturbation generated by nonlinear loads will seriously affect the stability of the inverter's output voltage,and it’s difficult to realize the accurate distribution of load power in parallel operation of micro-source inverters with different rated capacity. Based on the three-phase bridge inverter, a novel three-loop control strategy is proposed, which includes the sliding-mode voltage inner loop, the virtual impedance loop and the power outer loop. Finally, on the basis of theoretical analysis, MATLAB/simulink simulation is performed to verify that the control strategy can reduce the chattering and THD of the output voltage, resist filtering parameter perturbation and make the inverter meet the requirement of power allocation.
three-phase bridge inverter, adaptive sliding-mode, droop control, virtual impedance
1673-2057(2018)01-0006-06
2016-10-31
第53批中国博士后科学基金面上资助(2013M530895);中国博士后科学基金第七批特别资助(2014T70234)
杨赵倩(1991-),女,硕士研究生,主要研究方向为现代电力电子与新能源发电技术。
TE973
A
10.3969/j.issn.1673-2057.2018.01.002
