基于模糊自适应PID控制的速度调节器设计与仿真
2018-01-06金爱娟郑天翔纪晨烨苏俊豪蒋育晟郝陈祥
金爱娟,郑天翔,纪晨烨,苏俊豪,蒋育晟,郝陈祥
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于模糊自适应PID控制的速度调节器设计与仿真
金爱娟,郑天翔,纪晨烨,苏俊豪,蒋育晟,郝陈祥
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对异步电动机非线性的特点,考虑到传统PID控制难以对其进行有效的控制的问题。文中设计了一种模糊自适应PID控制器,并将这种控制器应用到系统的转速调节的环节中。利用Matlab的Simulink工具搭建了模糊自适应PID控制的异步电机的仿真模型。仿真实验结果证明了设计的优越性,模糊自适应PID控制下的系统超调变小,反应速度变快,与原先的PID控制方式相比提高了系统的稳定性、动态响应性能以及鲁棒性能。
模糊控制;PID调节;Simulink
随着人们对于矢量控制系统的调速性能的要求越来越高,在转速调节方面,仅采用传统的PID控制算法难以满足所设计系统的要求。在现有的一些控制方法当中,智能控制由于其具有变参数、自动寻优、适用于非线性系统等特点,将其合理运用在异步电机的调速系统中,能够提高整个系统的鲁棒性能,满足系统的控制需求。智能控制算法的应用中较为广泛的有模糊控制以及神经网络控制等方法,本文在转速控制环节采用模糊自适应PID控制算法,该方法既结合了传统的PID算法控制精度高、易于实施的特点,同时也具有模糊控制的高性能,因而可以较为明显的提高系统调速性能。
1 模糊控制基本原理
对于传统控制系统而言,它分析与设计的重点在于基于工作原理和系统辨识建立被控对象和控制系统的数学模型,并且将此作为整个控制系统建模、分析、设计的基础工作。然而对于模糊控制系统而言,其分析和设计则完全不同,并不需要设计者去关注被控对象的内部结构、工作原理以及数学模型[1]。
模糊控制主要由模糊化、模糊推理、模糊规则和解模糊化等部分组成,其基本结构如图1所示。
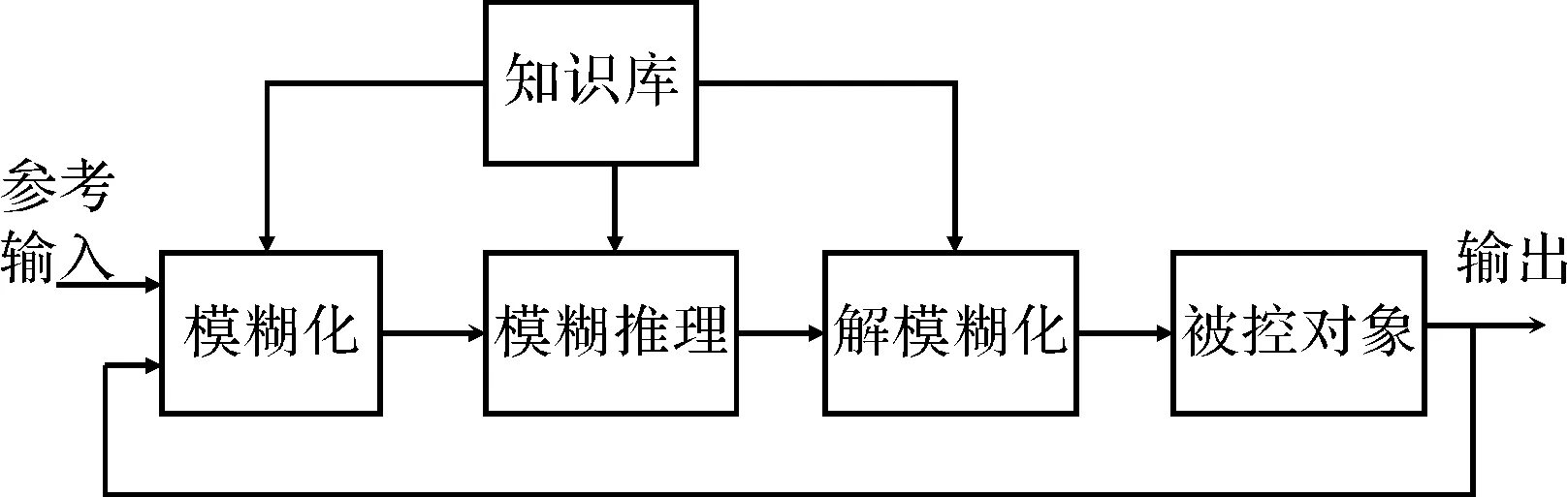
图1 模糊控制器的基本结构
(1)模糊化的作用是将精准的输入值转化成为可以被计算机识别出来的模糊化量,它的输入值是输出反馈与参考输入两个变量。将输入值模糊化的主要过程包括:首先,对输入值进行相关处理,以便满足模糊控制的要求;其次,通过相应的尺度变换将其值域转换到各个模糊论域的范围内;最后,需要进行相应模糊处理,将上述各值变成模糊量,且使用各自的模糊集合来表示;
(2)知识库主要包括数据库以及模糊控制规则库。其中,数据库中包含有语言变量的隶属度函数、尺度变换因子以及模糊空间的分级数;规则库当中则包含控制专家依据经验和知识建立的各种控制规则,这些皆是用来表示模糊语言变量的;
(3)模糊推理的理念是通过模糊的概念基础来模拟人类思想的推理能力,它是模糊控制的核心思想。即通过模糊控制的规则,对输入值推理,使之能够用模糊语言变量值表示;
(4)解模糊化可以看作是模糊化的逆过程,即将得到的模糊变量变为实际控制过程中的精准值。其主要过程可分为以下两个步骤:首先,解耦模糊量,使其变成在论域范围内的精准量;其次,对解耦得到的精准量进行相应的尺度变换,使其变成实际输出的控制量。
2 模糊自适应PID控制器设计
模糊控制设计的主要过程如下:先根据对被控对象的操作经验和策略,写成模糊规则;加上被控系统的输入和输出的数据,经过分析,形成模糊数据库。通过选定输入输出量、隶属度函数、模糊子集,确定模糊规则,设计出模糊控制器[2]。主要流程如图2所示。
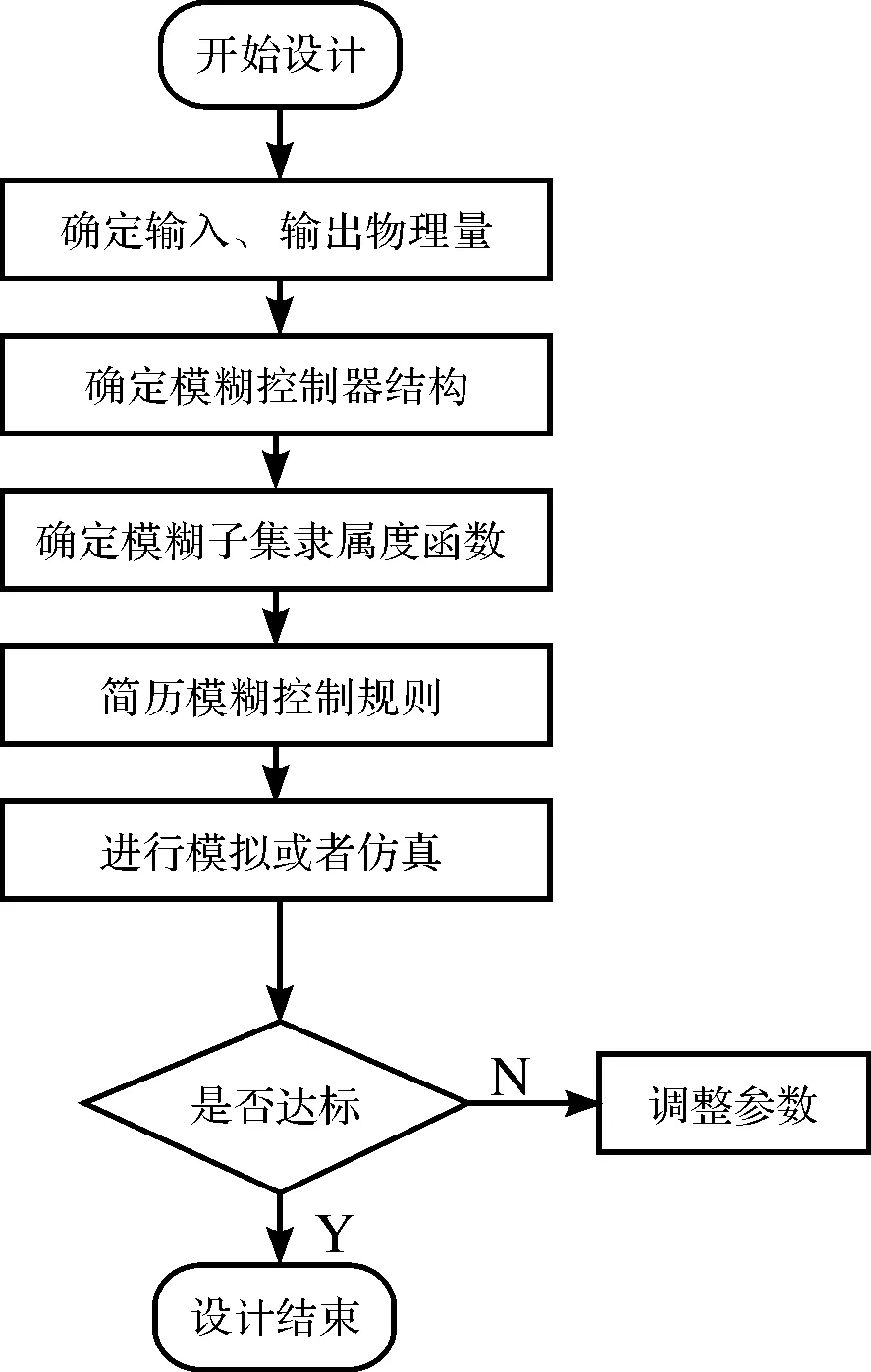
图2 模糊控制器设计的主要流程图
2.1 模糊PID控制器结构
本文所采用的是双输入三输出结构的二维模糊控制器,将转速与参考值比较得到的偏差信号e和转速偏差变化率模糊化,可以得到模糊变量|E|与|EC|,将这两个量作为模糊控制器的输入,通过模糊推理变化得到输出模糊集合,再经过解模糊可以得到模糊控制器的输出变量ΔKp,ΔKi,ΔKd,这样也同时确定了输入、输出的物理量。将这3个输出量再作用于PID调节器,即完成了对控制系统PID参数的在线校正,其控制器原理图如图3所示。
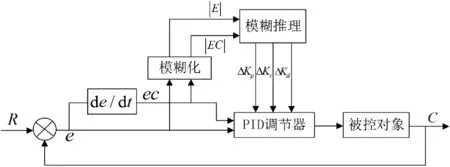
图3 模糊PID控制器原理图
2.2 PID控制器参数自整定原则
针对输出变量ΔKp,ΔKi,ΔKd,在综合考虑系统的稳定性、超调、响应速度以及稳态误差等方面后,结合系统在被控过程中参数|E|和|EC|的变化,可以总结PID参数自整定原则如下:
(1)当|E|值较小时,为使系统更加稳定,应该将ΔKp和ΔKi的值取大一些,同时,为了避免被控系统可能会出现的比较大的振荡,且考虑到系统需要具备一定的抗干扰能力,当|EC|值较小时,可将ΔKd取大一些;当|EC|较大时,ΔKd值相应取小一些。在一般情况下,ΔKd的取值为中等大小;
(2)当|E|值取中等大小时,为了使系统响应的超调量减小,ΔKd取值应该小一些。如此情况下,应将ΔKp和ΔKi都取适中的值,以保证系统的快速响应性能,其中ΔKd取值的大小会对系统响应产生较大影响;
(3)当|E|值较大时,即系统输出的转速与设定值的差值绝对值较大时,为了提高系统的跟踪性能,应该将ΔKp的值取大一些,而为了防止|EC|的瞬间值过大,应该将ΔKp取小一点,同时,为了减小系统的超调,应该对积分作用加以抑制,通常情况下可以将ΔKi的值取为0。
2.3 隶属度函数与模糊控制规则
根据本文的调速系统,如上文所述,已经选择输入变量为异步电机的转速偏差e和偏差的变化率ec,输出变量分别为PID控制器的修正量ΔKp、ΔKi、ΔKd,在Matlab中,应用其自带的模糊工具箱可以满足系统调速的设计需求。
一般的,输入变量和输出变量的变化范围都会设定在[-3 3]区间范围内,且为连续变量。对输入输出变量分别进行离散化模糊处理,并且统一到同一个论域中,设定其模糊子集为
{NB,NM,NS,Z0,PS,PM,PB}
其中各元素含义为
{负大,负中,负小,零,正小,正中,正大}
接着设定每个变量的隶属度函数。根据所设计的模糊控制器,其中ΔKp的隶属度函数如图4(a)所示,ΔKi的隶属度函数如图4(b)所示,ΔKd的隶属度函数如图4(c)所示。
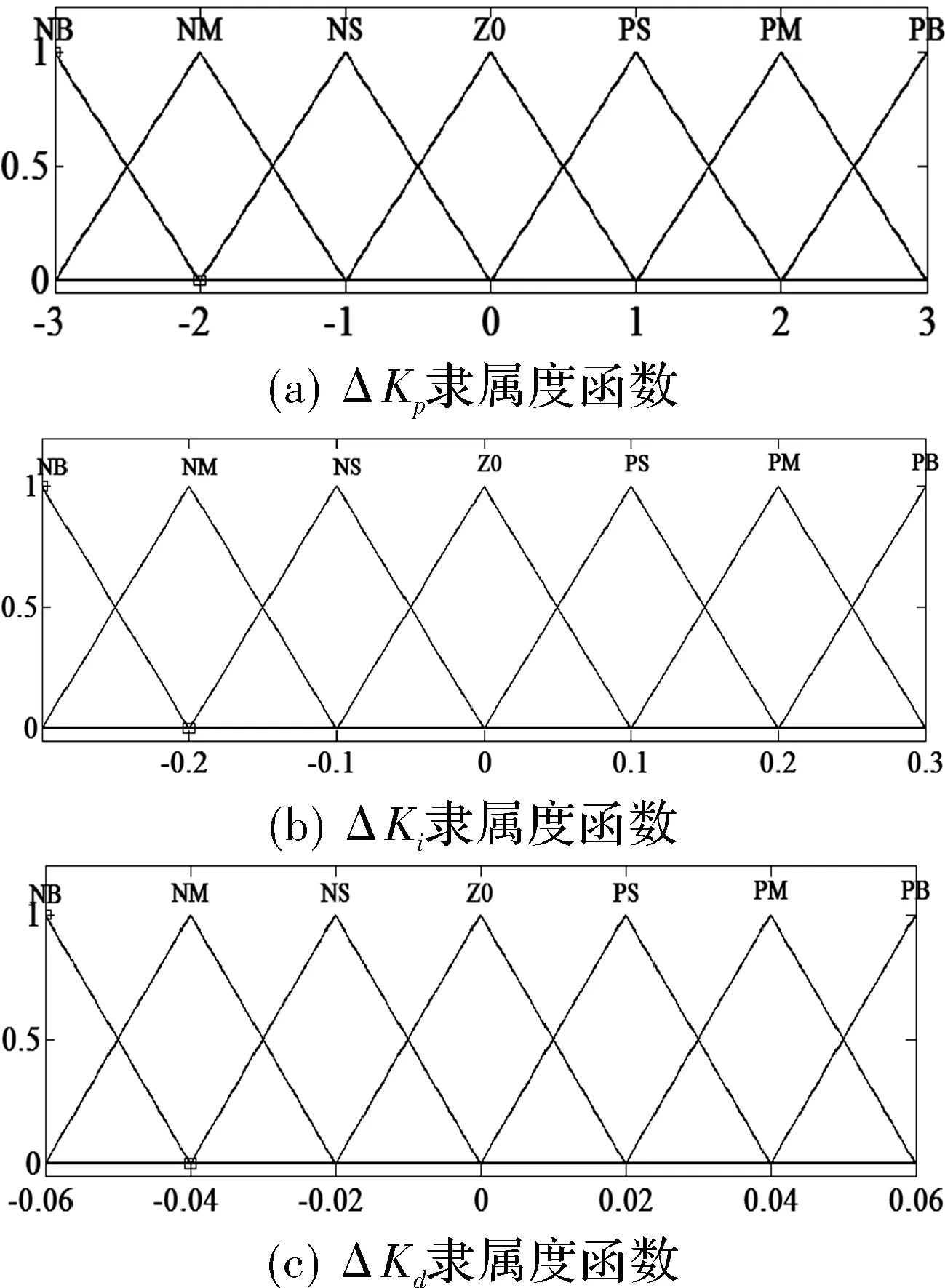
图4 模糊PID控制器原理图
根据模糊控制相关理论,参考实际调速经验进行控制规律的分析总结,进而可以建立如表1~表3所示的模糊推理规则。在Matlab中利用模糊规则编辑器,向其添加由“if-Then”构成的模糊规则,从Matlab中得到49条模糊关系表达式,使用逻辑关系“并”运算即可得到总的模糊关系,如此建成整个模糊系统。
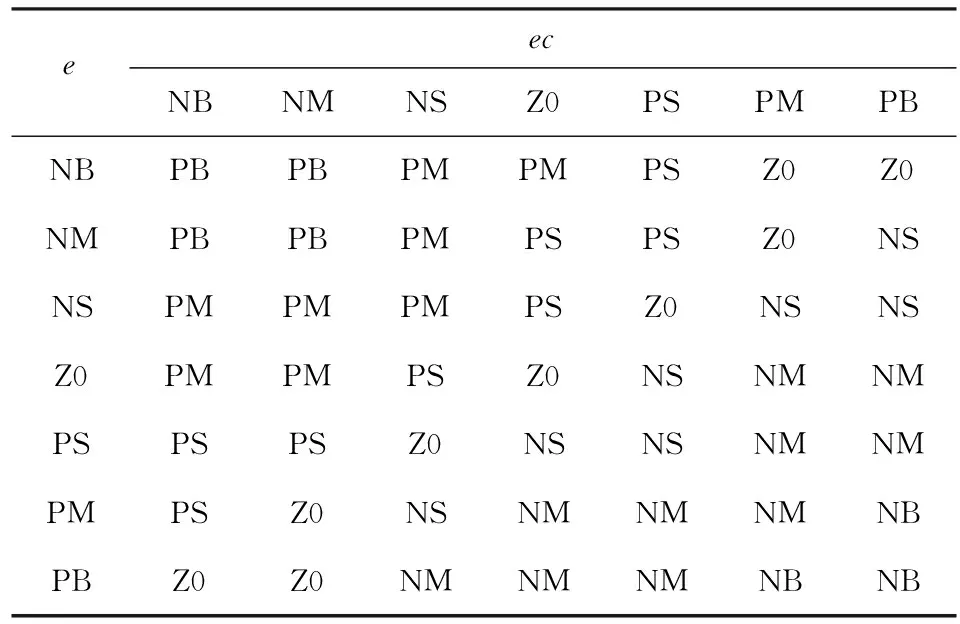
表1 ΔKp模糊规则表
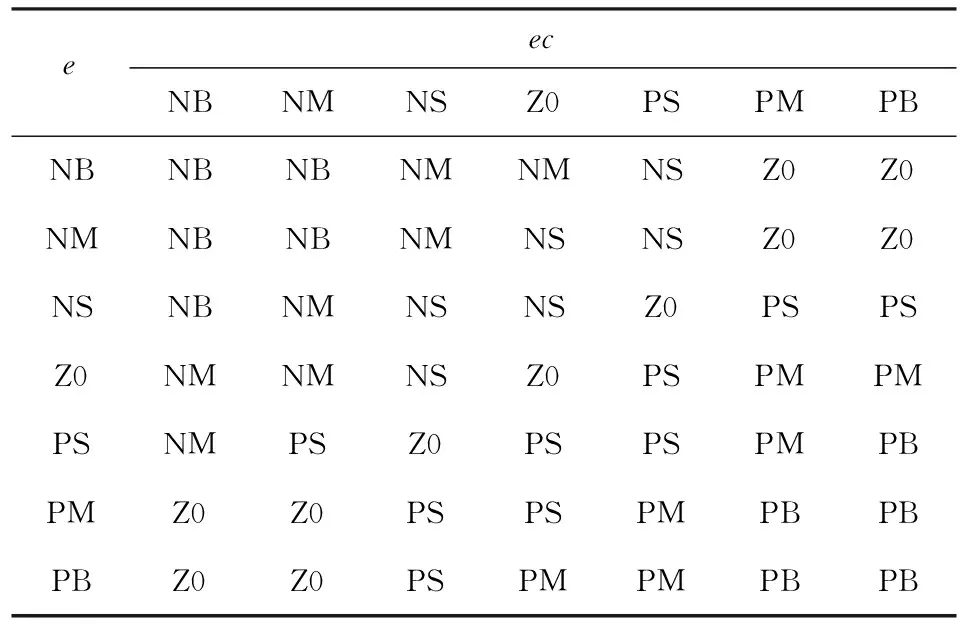
表2 ΔKi模糊规则表
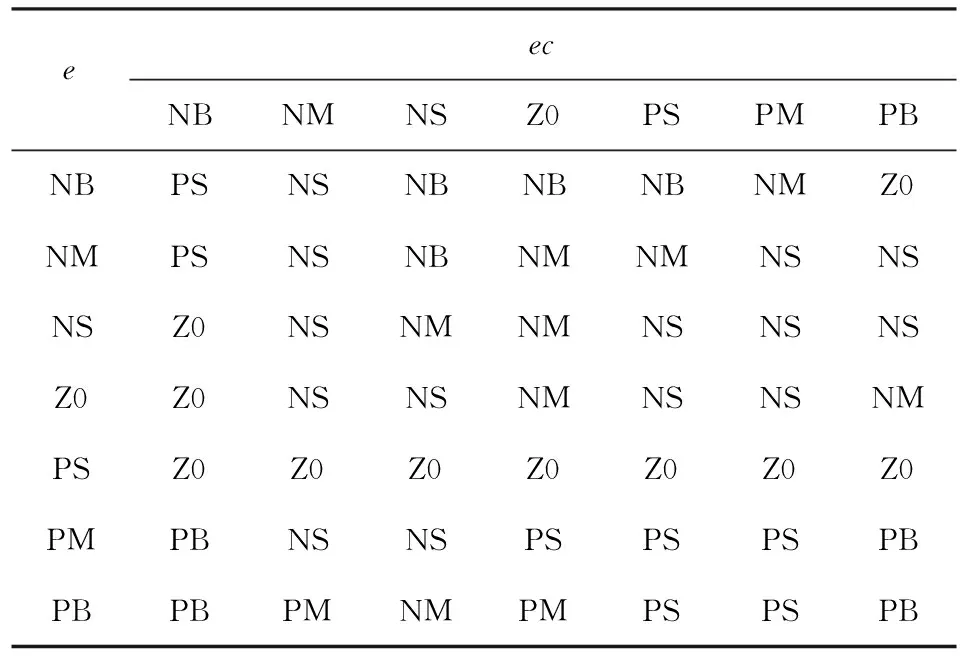
表3 ΔKd模糊规则表
3 系统建模与仿真
根据异步电机的控制框图,当采用模糊自适应PID进行速度调节时,其控制框图如图5所示。在Matlab中搭建仿真模型,其相应的仿真模型如图6所示。
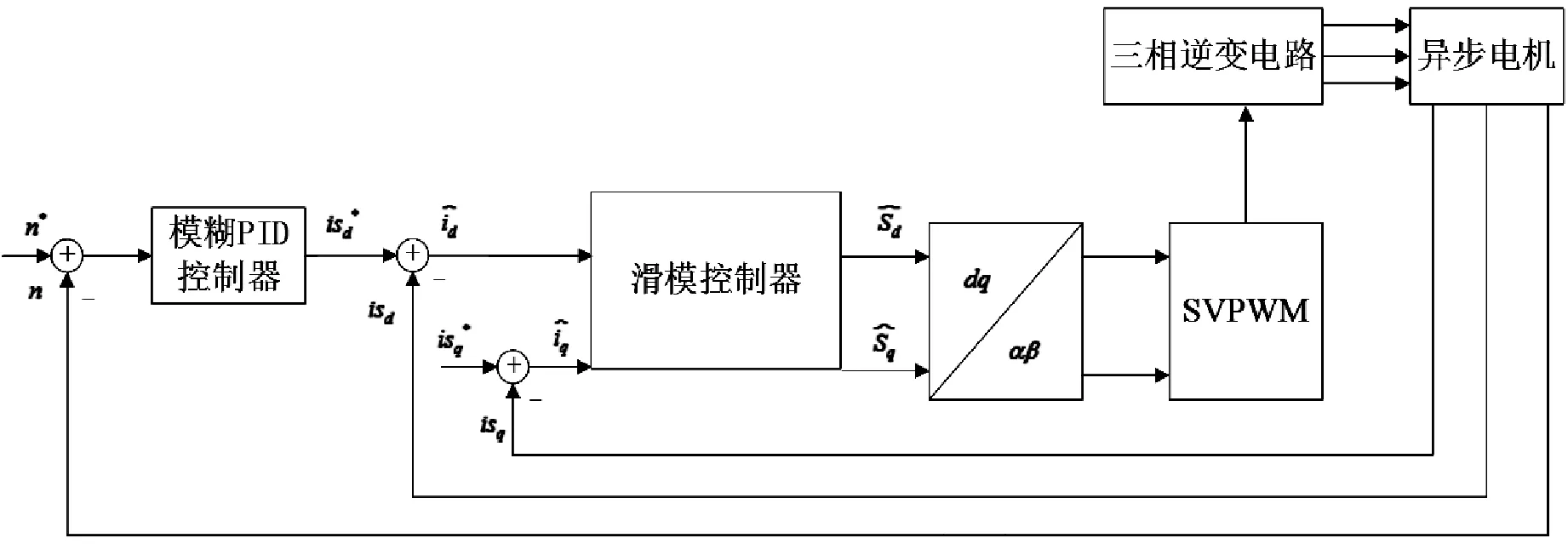
图5 模糊自适应PID控制的异步电机控制框图
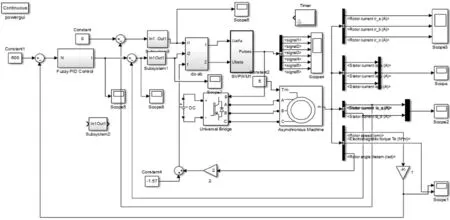
图6 模糊自适应PID控制系统的仿真模型
系统的速度环采用了模糊自适应PID控制,其中“模糊控制器”模块由Simulink工具箱中自带的模糊工具箱编写,再加入到此模块中,如图7所示。在此模块中,速度的偏差e及其变化率 是通过预先设定的模糊规则实现对3个PID参数的在线自整定,通过模糊控制,可以得到调整好的3个参数ΔKp、ΔKi、ΔKd,再根据
(1)
可以得到PID环节最终的3个参数,调节好之后,再经过设计好的PID调节输出给电流内环给定值。
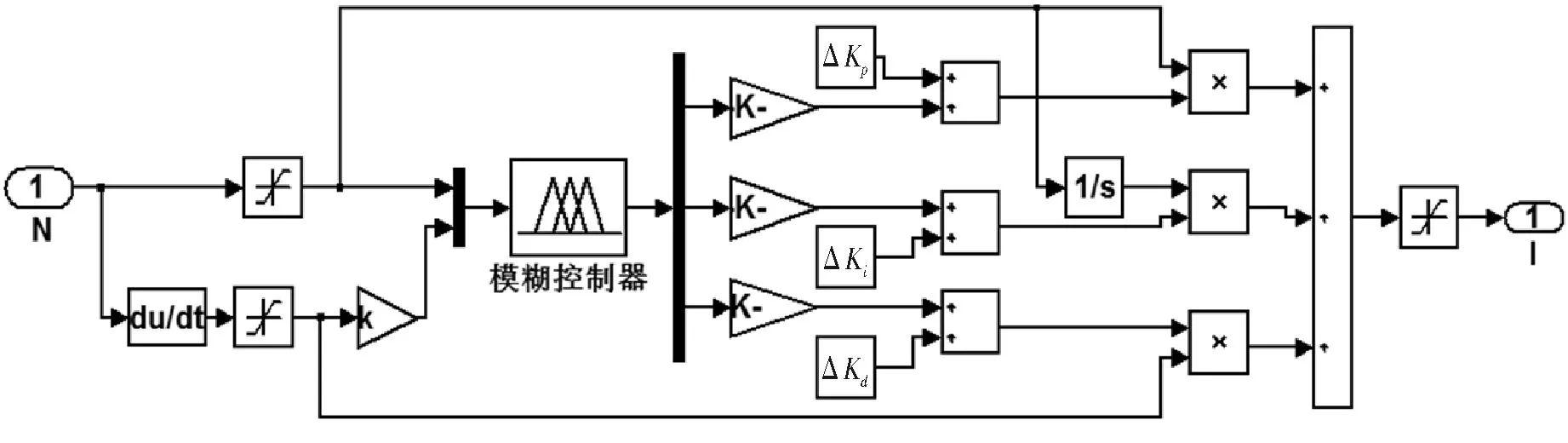
图7 模糊自适应PID控制模块
在图6搭建的模糊自适应PID控制的异步电机Simulink仿真模型中,设定各个仿真参数:额定转速400 rad/min;相电阻R=2.875 Ω;定子绕组自感L=0.02 H;互感M=-0.006 mH;转动惯量J=0.8e-3 kg·m2。
仿真中设置的输入电压为48 V。仿真得到采用模糊自适应PID控制下,转速、转矩响应曲线。设定系统在0~0.4 s内以400 运行,负载转矩为0.5 N·m;在0.4 s时,降低转速为300 rad/min,负载转矩不变;在0.8 s时,增加负载转矩为2 N·m,转速保持不变。转速波形如图8(a)所示,转矩波形如图8(b)所示。
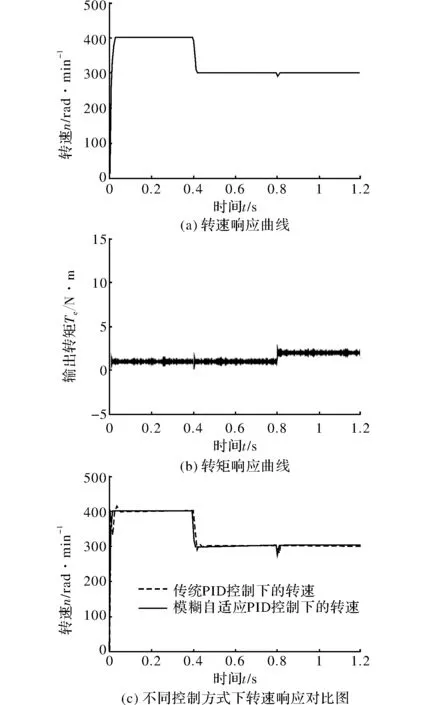
图8 模糊自适应PID控制模块
通过上述仿真曲线可以看出,在异步电机启动阶段,经过短暂的调节即可以保持平稳运转,输出转矩也很快稳定下来,在0.4 s电机转速减速,由400 rad/min减速到300 rad/min时,系统能够迅速稳定,此时对应的三相电流值的变化较小。在0.8 s时,负载转矩由0.5 N·m突变为2 N·m,系统同样能很快调整过来,电机转速能迅速稳定在300 rad/min,输出转矩也能很快达到相应的稳态值。在这一系列过程中,系统的速度调节快、脉动小。
设定系统运行在相同的环境条件下,对于速度调节,分别采用传统的PID控制以及模糊自适应PID控制,对应的转速波形如图8(c)所示。通过对比可知,在模糊自适应PID控制下,系统的转速响应更快,在较短的时间内即可进入稳定状态;在负载突变时,也能很快恢复稳态,调节时间短,对负载变化的抗干扰能力强,动态特性更好。
4 结束语
通过分析研究,设计了光一种新型模糊自适应PID算法。首先从模糊控制的基本原理入手,阐述了控制器的流程结构。随后以PID算法整定的原则为依据,进一步详细介绍了算法的隶属度函数与模糊控制规则,并根据算法的设计思路对模糊PID控制器在Simulink工具箱中进行仿真。最后通过仿真实验,对整定PID参数进行测试,验证了相对传统的控制器,该控制策略能够更有效提高系统的动态响应性能和鲁棒性等,符合并满足设计要求。
[1] 朱飞辉.基于模糊PID控制的永磁同步直线电机伺服控制系统研究与实现[D].衡阳:南华大学,2014.
[2] 仝昭军,刘珊中,李燕凡.机载光电跟瞄平台的模糊自适应PID跟踪控制[J].电光与控制,2014,21(4):65-68.
[3] 欧阳羿.异步电机速度自适应磁链观测器的研究[J].电气传动,2012, 42(10):9-13.
[4] 陈承义.异步电机变频调速矢量控制系统的Matlab仿真研究[J].煤炭技术, 2012,31(2):40-42.
[5] 马晓静,李金旭.永磁同步直线电机模糊PID控制的研究[J].电子世界,2016(15):182-183.
[6] Wang Z,Gao M,Zhuang S,et al.Design of asynchronous motor vector control frequency converter based on DSP[C]. Nanchang:8th International Conference on Intelligent Computation Technology and Automation (ICICTA),2015.
[7] 张杰,柴建云,孙旭东,等.基于反电动势与磁链正交性的异步电机电压模型积分改进算法[J].电工技术学报,2014,29(3):41-49.
[8] 杨勇明.基于模糊自适应PID的伺服扭矩加载系统[J].电子科技,2016, 29(10):107-110.
[9] Guzman R,Vicua L G,Camacho A,et al. Active damping control for a three phase grid-connected inverter using sliding mode control, industrial electronics society[C].CA,USA:IECON 2013-39th Annual Conference of the IEEE,2013.
[10] Bimal K Bose,博斯,王聪.现代电力电子学与交流传动[M].北京:机械工业出版社,2013.
[11] 谢树林.电力电子应用技术[M].北京:电子工业出版社,2014.
[12] 郭晓明.基于DSP的异步电机矢量控制系统的研究与实现[D].邯郸:河北工程大学,2015.
[13] 卢金铎,高静,李文强.基于Matlab的异步电动机仿真[J].科技与企业,2014(14):403-404.
[14] 刘辉,张斌.基于无源控制的无速度传感器异步电机调速控制[J].传感器与微系统,2016,35(6):45-47.
[15] 孙伟城,李磊.基于模糊自适应整定PID控制的脉冲MIG焊电源研究[J].电子技术,2016(1):33-36.
Design and Simulation of Speed Regulator Based on Adaptive Fuzzy PID Control
JIN Aijuan,ZHENG Tianxiang,JI Chenye,SU Junhao,JIANG Yusheng,HAO Chenxiang
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
In terms of nonlinear feature of asynchronous motor, it is considered difficult to adopt conventional proportional-integral-differential (PID) method to take effective control on the motor. A sort of controller via adaptive, PID and fuzzy method is then proposed and also applied to the speed regulation section. By using Simulink software tools in Matlab, a simulation model of fuzzy adaptive PID control for asynchronous motor is established. The computer simulation indicates the priority of the design which can be seen from that the overshoot and response of the system is reduced. The stability, dynamic responding and robust performance of the system are also improved comparing to the former control method of PID.
fuzzy control;PID regulation;simulink
2017- 03- 08
国家自然科学基金(61205076)
金爱娟(1972-),女,博士,副教授。研究方向:电机驱动控制。郑天翔(1992-),男,硕士研究生。研究方向:电力电子及电机驱动控制。
TP273
A
1007-7820(2018)01-029-05