基于PID控制的网络控制系统研究
2018-01-05高宏力钱桃林
王 勇,高宏力,梁 超,钱桃林
(西南交通大学 机械工程学院,成都 610031)
基于PID控制的网络控制系统研究
王 勇,高宏力,梁 超,钱桃林
(西南交通大学 机械工程学院,成都 610031)
该文针对网络控制系统的时延,综合其研究现状、方法以及仿真方法等,应用了Lyapunov函数证明系统全域渐近稳定,并将其转化为线性矩阵不等式(LMI)方程存在性求解问题。以理想网络环境为前提条件,系统控制性能为目标,研究存在固定时延的NCS问题,并设计了系统控制器;应用了实时性较好的TrueTime1.5仿真工具箱,基于Matlab运行环境,联合Matlab/Simulink设计仿真控制系统,对网络控制系统进行仿真试验。运用Matlab语言编写控制系统PID控制算法,联合Truetime工具箱设计仿真控制系统,证明了所设计的系统控制器的有效性。
网络控制系统;TrueTime工具箱;网络时延;PID控制
网络控制技术是网络通讯技术、计算机技术及控制技术交叉融合而产生的新型应用控制技术。网络控制这一概念早在20世纪90年代就已经被提出,文献[1]给出了网络控制系统NCS在概念意义上的定义。然而,对于NCS的研究可以追溯到20世纪80年代末,文献[2-3]中对ICCS的研究就是NCS研究的雏形。近年来,由于计算机技术、通讯技术的高度发达,为网络控制系统的研究提供了便利,加之网络控制系统在应用上的优势,使其成为现阶段的研究热点之一。
近年来,对NCS的研究已成为各高校的研究热点,主要围绕NCS存在的网络诱导时延、数据丢包、网络调度和时钟驱动等主要问题。结合经典理论与现代控制技术,对网络控制系统的理论研究逐渐趋于成熟,而对于理论的试验也是高校研究热点不可或缺的一部分。文献[4]对网络控制系统的试验平台建设与算法设计主要基于EtherNet运动控制平台,深入研究了网络诱导时延产生机理。文献[5]基于网络的计算机控制技术试验系统的研发,在Web平台上面向用户的具有大时滞特性的实际情况,以经典的三容水箱为研究对象,研究了大时滞对其控制性能的影响等。文献[6]介绍了网络控制系统的构成,试验实现了远程的控制实时性等。
网络控制系统仿真是理论研究NCS必要的研究方法,是控制算法验证、试验存在问题验证的必要手段。在此,运用经典控制理论以及NCS技术,简述了NCS存在的基本问题,设计了网络控制系统控制器,对系统PID控制算法进行仿真,最后加以总结。
1 NCS基本问题
参照文献[7-8],从控制网络体系架构出发,对网络控制系统进行研究。典型的NCS经直结构如图1所示,给出了控制系统的关键组成元素。NCS抽象模型如图2所示,在传统控制系统中加入通信网络,就构成了NCS。因网络的加入,从而引入了时延、数据丢包、信息调度、时钟驱动及数据包的时序错乱等,造成控制系统的不稳定。文献[9]讲述了NCS的基本问题,并结合该问题提出了若干解决办法、研究手段,对研究现状进行了展望。

图1 典型的NCS经直结构Fig.1 Typical NCS via direct structure

图2 NCS抽象模型Fig.2 NCS abstract model
传感器到控制器、控制器到执行器之间加入了通讯网络,控制系统的信号的传递存在网络时延。时延的产生是由于网络带宽、数据流量的不稳定、数据碰撞、网络阻塞和连接中断等造成,此外网络节点量化、控制计算等也会造成网络时延。时延的计算方法一般有3种,即试验的方法、理论推导以及信息包中加入“时间截”。
受网络带宽、数据流量、数据碰撞、阻塞等的影响,控制系统存在数据包丢失。此外,数据包在网络中的传输,发生错误而要求重发,以及数据包在一定时间内没到达就将被放弃。在控制系统中,由于系统存在实时性,在一定时间内没有到达的数据将被主动放弃,接着发送新数据。通常稳定的控制系统能够容许具有必然性的数据包丢失,但是超过其丢包率系统将失去稳定。
除上述问题以外,还有数据包的时序错乱、网络的信息调度、节点的驱动方式、单包和多包传输、多采样率及节点的时钟同步等。对于NCS的设计,必须综合所有基本问题对控制系统的影响。故此,在考虑所有问题的基础上,重点研究稳定系统在固定丢包率下确定时延的控制系统的稳定问题。
2 控制系统设计
以网络诱导时延为核心进行网络控制系统的设计,使用EtherNet为通讯方式,假设数据丢包率为固定值(不影响控制系统的稳定性)进行研究。经典NCS模型如图2所示,其给出了简单的NCS的基本组成。
NCS一般由控制器节点、传感器节点、执行器节点、控制对象及通讯网络等组成。由图2可见,存在于传感器与控制器之间的时延为τsc,控制器与执行器之间的时延为τca,控制计算时延为τc。由于τc相对于τsc+τca较小,可以忽略不计,所以一般只记总时延 τ=τsc+τca。
2.1 系统描述
时延τ主要存在于传输网络中,由于带宽、丢包等具有随机性,因此其存在不确定性和一定的随机性。为分析时延对控制系统的影响,首先对NCS作以下假设:
①传感器选用时钟驱动,控制器、执行器选用事件驱动;
②总时延为数据传输时延,主要在传感器节点与控制器节点、控制器节点与执行器节点之间,减小了其余不确定干扰因素;
③时延为确定界时延,且固定在一定区间范围内,其值不大于1个周期。
对于图1所示NCS,一般线性连续受控模型为

式中:x(t)∈Rn,u(t)∈Rm,y(t)∈Rr分别为系统的状态、控制输入及系统输出向量;矩阵A,B,C为适维实矩阵。存在时延的系统为

考虑到时延对控制系统的影响,将连续系统式(2)采用时刻离散化,得到:

2.2 控制器设计
定义1 对于网络控制系统式(3),当存在Lyapunov函数 V(x(k))时,且满足 V(x(k))>0,即 V(x(k))为正定函数;函数 V(x(k))沿式(3)的前向差分 ΔV(x(k))=V(x(k+1))-V(x(k))为负定,即 ΔV(x(k))<0,因此,闭环系统式(3)对于给定初始条件趋于稳定。
假设被控对象的状态都可预测,并且时延设定为确定时延,使用 u(k)=Kx(k)作为控制函数,如果有对称的正定矩阵P,S及反馈控制系统的增益K,从而有:

成立,则闭环系统式(3)渐进稳定。
定义Lyapunov函数

式中:P,S 为对称正定矩阵,很显然 V(x(k))>0,而
把式(3)代入式(6),得到:


由 Lyapunov函数可知,若 ΔV(x(k))<0 成立,则式(3)趋于稳定。因此:

根据 schur补性质,可以将式(8)变为式(4),同时由于存在1个从分条件:

所以可得 ΔV(x(k))<0,从而闭环控制系统式(3)渐进稳定。
3 仿真与结果分析
在此,运用TrueTime在Matlab/Simulink环境下实现NCS与网络调度实时系统的联合仿真,以Visual C++6.0及以上版本为编译器编译TrueTime网络控制仿真工具箱。文献[10]介绍,使用TrueTime仿真试验,研究LQG算法的对3个倒立摆的NCS仿真试验,验证NCS存在的问题对系统的影响。结果为在使用调度算法不同时存在的丢包率,对系统稳定性有明显的影响。
TrueTime的仿真体具有较好的实时性,与NCS的实际情况有许多相似之处。TrueTime与Matlab/Simulink结合进行仿真,更能真实地反应系统的实时性能,可以用于构建计算机的实时分布式NCS的动态试验过程、模拟网络调度和建立系统的控制模型。实际数学模型为

系统控制器节点4和执行器节点2的驱动方式采用事件驱动,而传感器节点3的驱动方式采用时间驱动。通讯方式选择EtherNet以太网通讯,网速100000 b/s。假设系统丢包率设定为0,存在短时延,且其值小于采样周期。
当采样周期为 0.01 s时,调整参数 KI,KP,KD。其中,KI=200,KP=400,KD=19。
NCS模型如图3所示,控制系统由4个网络控制节点、1个网络模块和其他一些Simulink模块等组成。

图3NCS模型Fig.3 NCS model
网络控制节点由TrueTime Kernel与Simulink模块组成。Node1为干扰节点,时钟驱动方式,以固定周期的方式周期发出信号占用网络带宽,从而干扰网络传输质量,其为均值零的白噪声;Node2为执行器节点,执行器接收由网络调度传来控制器的信号,作用于被控对象;Node3为传感器节点,接收整个系统输出,通过网络的调度反馈给系统PID控制器;Node4为PID控制器节点,事件驱动方式,接收输入信号和反馈信号,控制计算,对控制对象进行反馈控制校正。
控制系统选用有线网络控制模块(Network),有4个输入和4个输出。
图4为系统控制输出,其为控制器在接收到传感器发送的信号进行计算输出。图5为系统仿真的曲线跟踪输出。由图可见,跟踪曲线平稳性较好、响应速度快、超调量较小。
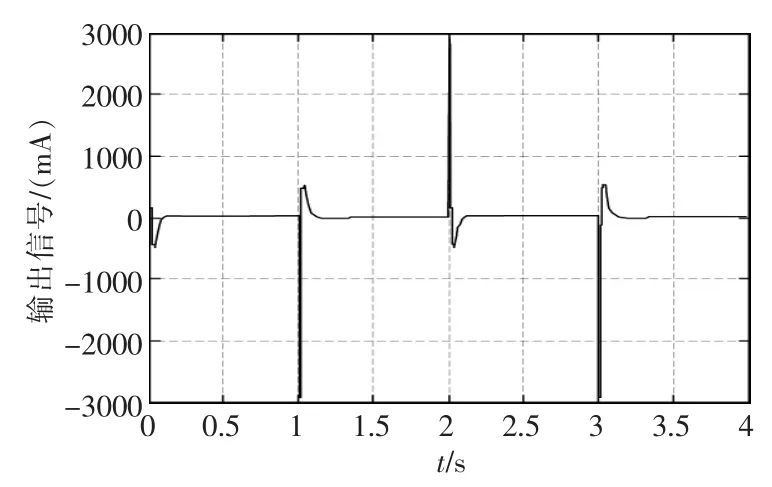
图4 系统控制输出Fig.4 System control output

图5 曲线跟踪Fig.5 Curve tracking
4 结语
基于经典控制理论的状态方程,建立了实际控制对象的状态方程数学模型,在网络控制系统中把网络时延添加到状态方程中,对网络控制系统进行了系统的分析。综合运用了LMI矩阵不等式和Lyapunov函数,并使用TrueTime工具箱验证所设计的控制算法,结果显示控制算法具有效好的鲁棒性。综合运用TrueTime工具箱与Matlab的联合仿真,得到了跟随指定期望轨迹的效果图。仿真结果表明,PID控制策略对固定时延和丢包率的控制,响应时间快,超调量小,且趋于稳定。该研究能够为其它随机时延和丢包率控制的研究提供一些参考。
[1] Walsh Gregory C,Ye Hong,Bushnell Linda.Stability analysis of networked control systems[C]//Proceedings of the American Control Conference.SanDiego California USA:[s.n.],1999:2876-2880.
[2] Halevi Y,Ray A.Integrated communication and control systems:part I-analysis[J].ASME Journal of Dynamic Systems,Measurement and Control,1988,110(4):367-373.
[3] Ray A,Halevi Y.Integrated communication and control systems:part II-design considerations[J].ASME Journal of Dynamic Systems,Measurement and Control,1988,110(4):374-381.
[4] 黄海.网络控制系统实验平台建设与算法研究[D].杭州:浙江大学,2007:1-130.
[5] 傅宗宁.基于网络的计算机控制技术实验系统的研发[D].杭州:杭州电子科技大学,2015:1-60.
[6] 李宪.网络控制实验的开发与实验设计[D].沈阳:东北大学,2012:1-55.
[7] 王岩,孙增圻.网络控制系统分析与设计[M].北京:清华大学出版社,2009.
[8] 员俊峰,姚艳彬,宗光华.基于PLC的机器人制孔执行器控制系统设计[J].机械设计与制造,2010,31(7):144-146.
[9] 芮万智,江汉红,候重远.网络控制系统研究综述与展望[J].信息与控制,2012,41(1):83-87.
[10]陈波,孟朝明,葛斌,等.TrueTime的网络控制系统仿真研究[J].控制工程,2008,15(5):501-503.
Research of Network Control System Based on PID Control
WANG Yong,GAO Hong-li,LIANG Chao,QIAN Tao-lin
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
For the delay of the network control system,integrated its research status,methods and simulation methods.The Lyapunov function is used to prove the global asymptotic stability of the system,and it is transformed into the existence problem of linear matrix inequality(LMI)equation.Taking the ideal network environment as the prerequisite and the system control performance as the goal,the NCS problem with fixed delay is studied,and the system controller is designed.Application of real-time simulation toolbox better TrueTime1.5,based on Matlab operating environment,the United Matlab/Simulink design control system of simulation,the simulation experiment of network control system is carried out.The control system PID control algorithm is written in Matlab language,and the control system of simulation is designed in Truetime toolbox.The results show that the system controller is designed to be effective.
network control system(NCS);TrueTime toolbox;network delay;PID control
TP393;TP273
A
1001-9944(2017)08-0053-04
10.19557/j.cnki.1001-9944.2017.08.013
2017-02-21;
2017-04-23
王勇(1987—),男,在读硕士研究生,研究方向为网络控制、鲁棒控制;高宏力(1971—),男,博士,教授、博导,研究方向为机器人技术、机电液一体化及其故障诊断等。
