“嫦娥三号”巡视器热试验月面姿态模拟装置研制
2018-01-05秦家勇裴一飞尹晓芳高庆华
秦家勇,裴一飞,王 晶,尹晓芳,高庆华
“嫦娥三号”巡视器热试验月面姿态模拟装置研制
秦家勇,裴一飞,王 晶,尹晓芳,高庆华
(北京卫星环境工程研究所,北京 100094)
月面巡视器在月表移动的过程中,月面起伏和月球(1/6)重力会对巡视器的热控系统产生不利影响,因此需要在地面试验时对巡视器的热控系统的功能进行验证。文章通过对运动机构在真空低温环境下的适应性研究,研制了一套可以满足“嫦娥三号”巡视器真空热试验中使用的月表姿态模拟装置,该模拟装置通过2套螺旋升降机构实现了巡视器的俯仰和滚动模拟,并经过初样、正样热试验的2次大型试验的使用验证,圆满完成了试验任务,也为以后热试验中运动工装的设计奠定了基础。
月面巡视器;热试验工装;倾斜姿态模拟装置;真空低温环境
0 引言
“嫦娥三号”探测器包括巡视器和着陆器,是探月工程二期探测器系统的重要组成部分,承担着在月球表面着陆并实施探测的任务,也是我国第一个在月球表面着陆的航天器。巡视器在月表行走的过程中需要经历月表地面起伏、(1/6)重力等复杂环境的影响[1-2],这将直接对巡视器热管和两相流体回路的工作状态产生影响,因此需要在地面进行充分的验证。欧美主要使用太阳模拟器和运动模拟器配合作为外热流模拟手段[3-4],我国传统航天器热试验多采用红外热流模拟方法,受试航天器在试验中基本处于水平静止状态。
由于巡视器内部采用了两相流体回路热控措施,故除以红外笼作为外热流模拟手段之外,还需要在姿态模拟装置上安装模拟车轮温度边界的冷板以及在对接部位安装温度跟踪装置等。这些都需要一个结构紧凑、运行稳定的安装平台,设计出一套满足巡视器真空热试验要求的月面姿态模拟装置(下称模拟装置)。本文着眼于此开展设计研究。
1 工装设计要求
为了在热试验中模拟月面起伏和(1/6)重力对两相流体回路等热控产品性能的影响,试验工装需要满足巡视器绕其、轴各转动±2.5°的要求,倾角调节精度0.1°,并且试验过程中需要多次调整(如图1所示)。本次试验工装与以往静态工装不同,需要包含电机、驱动机构、转动副等多个运动部件,在真空低温环境下的运动结构设计涉及设备保温、机构润滑、防止结构变形卡死等。试验在KM6F中进行(如图2所示),工装同时还应设置冷板来减少对热沉的遮挡,以避免巡视器底面背景热流过大。冷板安装空间狭窄、巡视器试验系统组合后人员操作空间受限,给工装设计和操作带来很多困难。模拟装置试验过程中需多次运动,对设计的可靠性也提出了很高的要求。

图1 巡视器在试验中转动的示意图

图2 巡视器在KM6F中进行试验
2 试验工装结构设计
“嫦娥三号”巡视器热试验工装主要包括巡视器月面姿态模拟装置、顶部移动红外笼及其水平移动系统、围栏红外笼、冷板系统、支架控温系统等,具体结构参见图3。其中模拟装置是整个试验工装的核心部件,对巡视器、冷板、围栏红外笼起到支撑作用,也是系统组成最复杂、设计难度最大的部分。

图3 KM6F容器内的“嫦娥三号”巡视器及试验工装
巡视器月面姿态模拟装置由下往上分别为底部支架车、俯仰驱动机构、十字梁、滚动驱动机构和顶部对接方框,其结构见图4。整个模拟装置的主结构都采用1Cr18Ni9Ti的奥氏体不锈钢型材焊接而成,由于奥氏体不锈钢在低温环境下能较好地保持原有的韧性和强度,不存在冷脆现象,保证了试验支架在使用过程中的可靠性[5-6]。
1)底部支架车
框架结构的支架车是整个模拟装置的基础,支架车上安装有车轮、轴承支座和俯仰驱动机构等,并通过车轮固定在KM6F的导轨上。俯仰驱动机构底部使用螺栓固定于支架车,顶部采用销轴通过U型插头固定在十字梁长臂下方的滑槽内,如图5(a)所示。销轴在滑槽内可以往复滑动。
2)十字梁
十字梁由2根不锈钢型材正交焊接而成,底部焊接加强筋,是整个模拟装置的核心部分。其中:轴为长臂,长2324mm,俯仰驱动机构支点距转轴距离为820mm;轴为短臂,长1446mm,滚动驱动机构支点距转轴距离为530mm。十字梁依靠短臂两端的短轴固定在支架车两端的轴承座内,轴承座与俯仰驱动结构一起支撑十字梁。滚动驱动机构安装在十字梁的短臂上,顶部销轴固定在对接方框下方的滑槽内,如图5(b)所示。
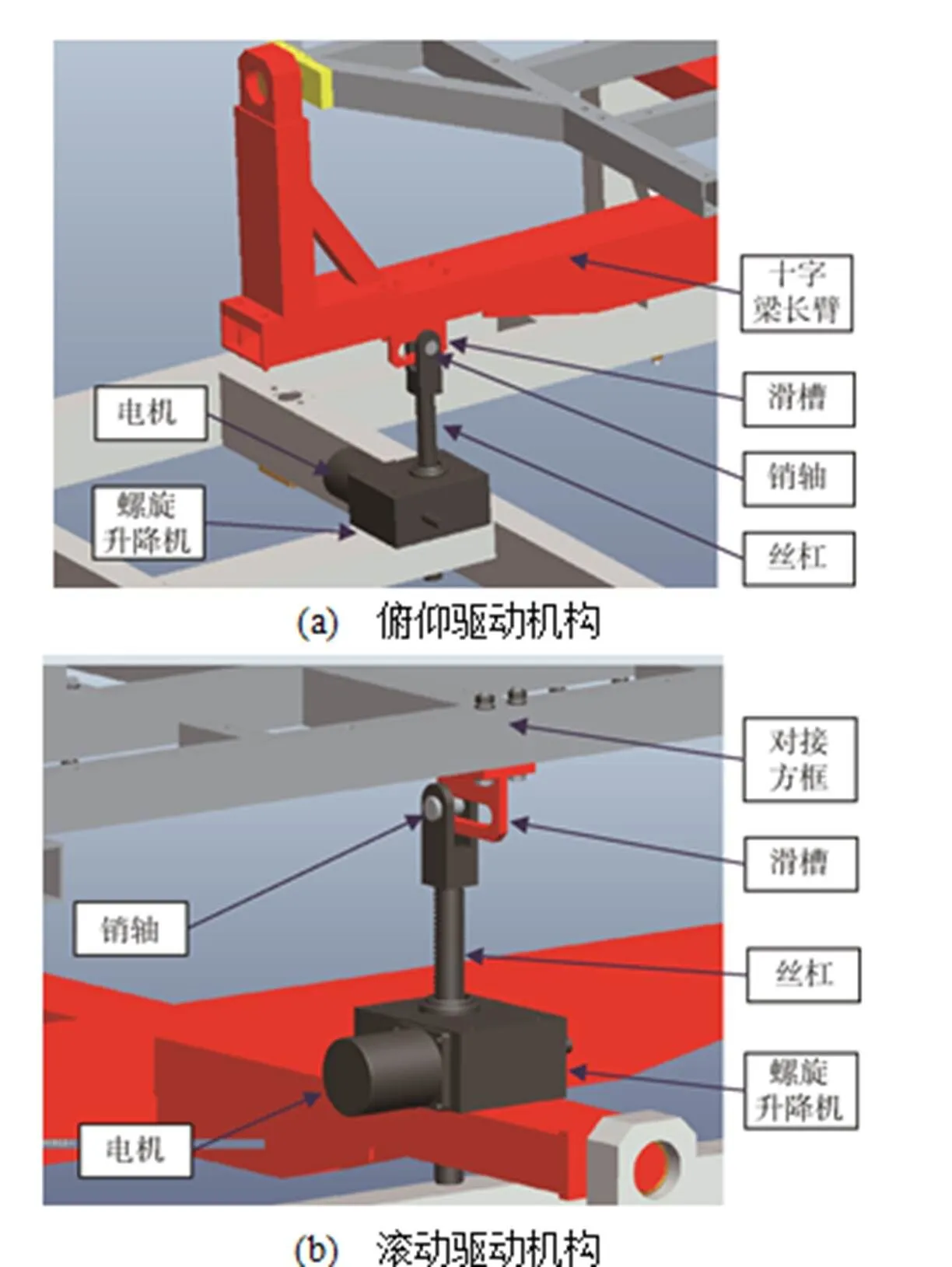
图5 俯仰和滚动驱动机构装配示意
3)对接方框
对接方框通过两端的短轴固定在十字梁长臂两端的轴承座内,轴承座与滚动驱动机构一起支撑对接方框。对接方框上端通过对接立柱与巡视器连接。对接方框上平面同时起到对冷板、围栏红外笼的支撑作用。
4)俯仰和滚动驱动机构设计选型
螺旋升降机的机构原理是蜗杆涡轮机构与螺旋丝杠机构的组合。SWL螺旋升降机具有结构紧凑、自锁特性、体积小、重量轻、无噪声、安装方便等优点。
①螺旋升降机的行程计算
螺旋升降机丝杠的上下运动将带动巡视器进行俯仰和滚动,巡视器俯仰和滚动角度为±2.5°,由式(1)和式(2)可以计算出螺旋升降机的行程和销轴相对于滑槽的横向位移,假设螺旋升降机的行程为,支点的回转半径为,回转角度为,则
=2××tan(/2); (1)
横向位移为
=−×cot(/2)。 (2)
将俯仰和滚动的回转半径代入式(1)和式(2)可知,当翻转±2.5°时,螺旋升降机丝杠需要垂直运动86mm和55.5mm,而对应的销轴相对滑槽的横向滑动分别为1.3mm和0.73mm。
②螺旋升降机的选型
首先根据受力分析,得到作用在螺旋升降机上的轴向力<300N,横向力<27N;然后根据JB/T 8809—2010《SWL涡轮螺杆升降机型式、参数与尺寸》的附录C(螺杆长度与极限负荷关系图)和附录D(螺杆许用侧向力s与轴向力a与行程的关系图)选择升降机的型号(图6)[7-9]。

图6 螺旋升降机的选型参考曲线
综合考虑载荷和整体结构的稳定性,本方案选用SJA-20螺旋升降机,其有效载荷为2.5t,丝杠型号Tr30。选用三相异步变频电机进行驱动,通过控制电机的频率控制电机转速。该型号螺旋升降机蜗杆输入1转,丝杠上升0.25mm,则可近似计算出蜗杆转动1转,上层翻转的角度为0.027°,下层翻转结构转动的角度为0.0168°,满足角度最小变化量不超过0.1°的设计要求。
3 月面姿态模拟装置受力分析
1)模型简化
本次计算主要关注模拟装置的结构强度,故对几何模型、力学模型进行如下简化:
①总承重350kg;
②巡视器在试验中转动角度范围为±2.5°,重心位移不大,近似为水平放置,因此仅计算水平状态下支架的受力;
③对结构装配的焊缝进行简化处理,不绘制焊缝几何模型,忽略相应部位产生的应力奇异;
④转轴与滑动轴承的接触简化为接触面的绑定接触;
⑤巡视器和冷板采用附加质量点方式,根据接触面的不同施加载荷,参见图7(a)。
2)材料模型和参数
试验工装材料为1Cr18Ni9Ti奥氏体不锈钢,根据机械设计手册[10]上的材料参数,其力学性能如表1所示,计算时采用线弹性材料模型。
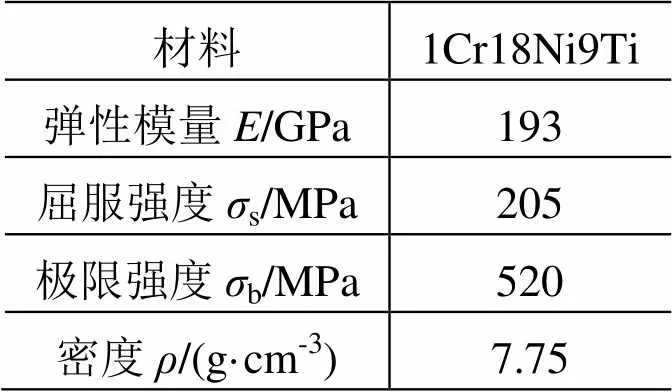
表1 材料力学性能参数
3)网格模型
整个月面姿态模拟装置结构采用六面体、四面体自由剖分,对重点关注的焊缝局部进行网格加密,网格剖分单元总数206491,节点总数472761,模拟装置的网格模型见图7(b)。
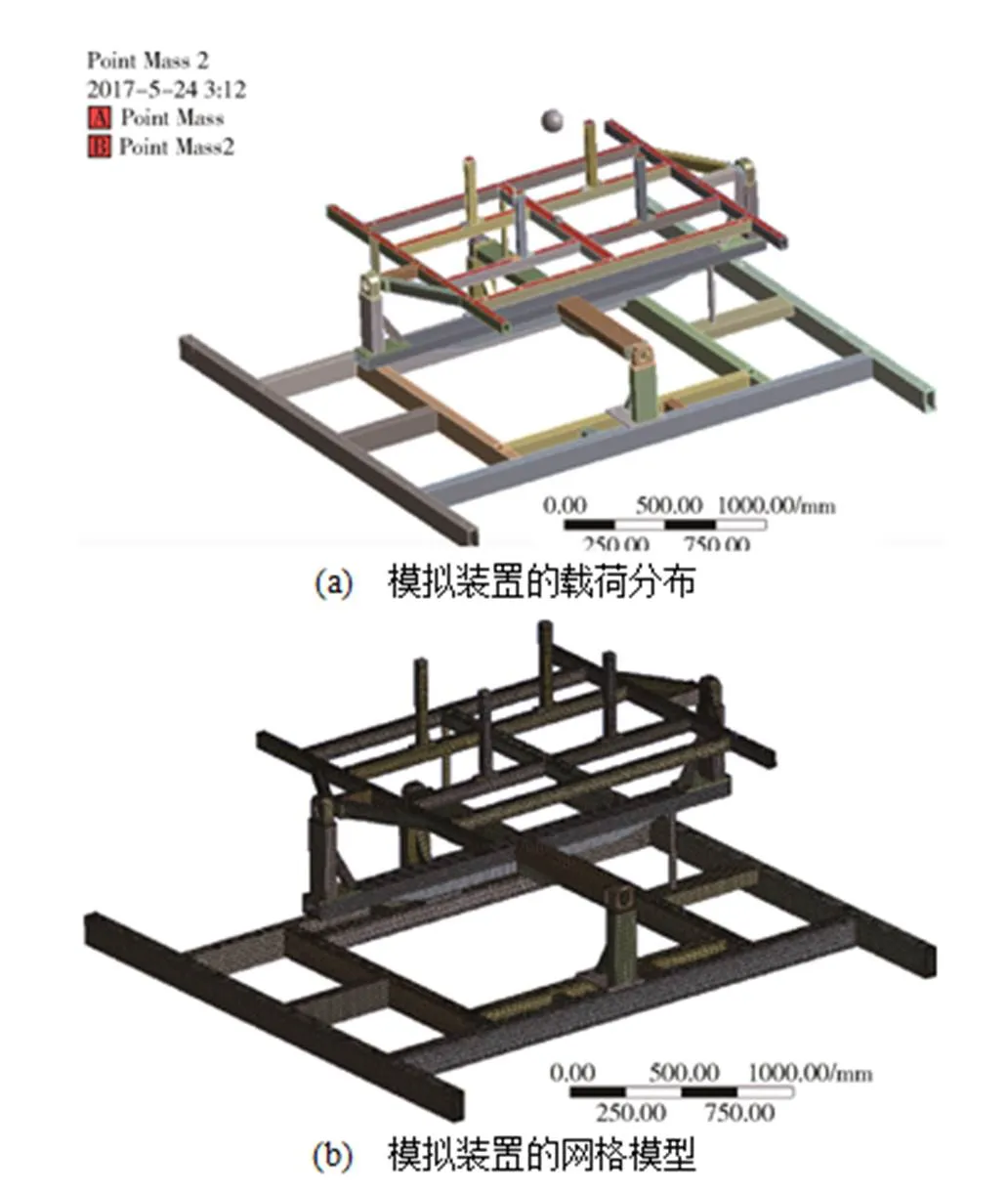
图7 模拟装置的受力分析
4)应力分布
模拟装置在巡视器和冷板重力以及自重作用下,其等效应力分布如图8所示。总体来说十字梁的应力分布较大,其中十字梁中心下方的加强筋处应力最大,忽略焊缝处应力集中的极值,该处应力最大等效应力<50MPa。按照第四强度理论,支架的等效应力小于材料屈服强度,安全系数为4,模拟装置结构强度满足要求。

图8 模拟装置的应力分布
4 真空低温环境下的适应性设计
为了防止模拟装置在真空低温环境下因运动副卡死导致试验失败,模拟装置进行了6个方面的真空低温环境适应性设计:
1)采用质地较软的H62黄铜材料作为转动副的滑动轴承,避免了转轴与轴承座之间发生真空冷焊。
2)黄铜轴套与轴承座之间采用大间隙配合,为低温环境下材料的冷缩变形预留了足够的空间(2mm),避免出现转动轴被冷缩抱死的现象。
3)在转速慢、频率低的转动副(如轴套和轴承座之间的摩擦面)上施加MoS2固体润滑剂。MoS2具有在真空下无挥发、无污染的优点,是优良的真空润滑剂[11]。
4)筛选了一种能够在真空环境下具有极低挥发性的润滑脂来替代普通的润滑脂,成功解决了电机和螺旋升降机的润滑问题[12],使普通电机和螺旋升降机能够满足高真空环境下的使用要求,替代了进口的真空电机,节省了大量的经费,也缩短了研制周期。
5)采用在外表面粘贴加热片加包覆多层的方式对电机及螺旋升降机进行控温,控温阈值为(20±5)℃,防止电机及升降机低温失效;在试验支架的型材外侧缠绕加热带,试验中对其进行控温,控温阈值为(20±5)℃,减少支架的变形。
6)为了简化设计难度,姿态调节的驱动机构采用开环控制,巡视器的角度通过安装在其底面的水平敏感器测得,试验过程中由操作人员在真空容器外的上位机上进行手动控制;在丝杠运动机构上设计行程开关,防止丝杠超行程运行,保证了产品的安全。
5 调试试验验证
1)模拟装置的角度调节
巡视器月面姿态模拟装置经过了调试试验、“嫦娥三号”初/正样热试验的使用验证,巡视器姿态调整6次,经历了60余天的真空低温考验,模拟装置没有发现卡死的情况,工作状态良好。其中模拟装置进行角度调整的记录如表2所示。试验过程中模拟装置的角度调节均经过总体方面确认,满足试验要求。

表2 模拟装置的使用记录
2)支架的控温效果
通过控温,试验支架在试验过程中的温度基本保持在20℃左右,变化幅度不超过4℃,保证了支架不会有大的变形。
3)电机的控温效果
模拟装置共安装了2台电机,通过控温,电机在试验过程中的温度基本保持在20℃左右,确保了电机的正常工作。
6 结束语
巡视器月面姿态模拟装置经过了“嫦娥三号”初样、正样热试验的2次大型试验的使用验证,试验过程中进行了多次姿态调整,工作状态良好,准确模拟了巡视器在月面行进过程中的倾斜姿态,配合巡视器总体设计部门验证了巡视器热控设计的正确性,考核了巡视器研制工艺。该基于多功能、多方向复合模拟技术的月面复杂热环境模拟系统达到了国际先进水平。本模拟装置研制过程中,在真空低温环境下的运动副设计、真空润滑、电机控制、工装变形控制等方面积累了经验,可为以后真空热试验中高精度多维运动机构研制提供参考。
[1] 贾阳, 申振荣, 庞彧, 等. 月面巡视探测器地面试验方法与技术综述[J]. 航天器环境工程, 2014, 31(5): 464-469
JIA Y, SHEN Z R, PANG Y,et al.A review of field test methods and technologies for lunar rover[J]. Spacecraft Environment Engineering, 2014, 31(5): 464-469
[2] 白羽, 郝宁, 王志浩. 模拟月尘对巡视器车轮轮轴材料的磨损试验研究[J]. 航天器环境工程, 2013, 30(5): 493-497
BAI Y, HAO N, WANG Z H. Abrasion test on wheel and axle materials of lunar rover under the influence of simulation lunar dust[J]. Spacecraft Environment Engineering, 2013, 30(5): 493-497
[3] WEBER R C, STOYER R E, CARPENTER W A.Mobile test fixture system for use in a thermal vacuum facility[R].NASA, 1986-1-1
[4] CHO H, MOON G W, LEE S H, et al. Complex ground support equipments for satellite thermal vacuum test[C]//26thSpace Simulation Conference 2010, 2010: 859-871
[5] 黄本诚, 童靖宇. 空间环境科学[M]. 北京: 中国科学技术出版社, 2010: 212-224
[6] 李雅娴. 应变强化奥氏体不锈钢低温容器材料和成形工艺研究[D]. 杭州: 浙江大学, 2010
[7] 王宇, 王艳丰. 螺旋升降机的选用[J]. 机械工程师, 2013(2): 167-168
[8] 孙兴华, 周艳. 真空热试验红外加热笼运动驱动系统设[J]. 装备环境工程, 2014, 11(2): 38-40
SUN X H, ZHOU Y. Design of movement driving system for infrared heating cage in vacuum thermal tests[J].Equipment Environmental Engineering, 2014, 11(2): 38-40
[9] 刘润林. SWL涡轮螺杆升降机型式、参数与尺寸: JB/T 8809—2010[S]. 中华人民共和国工业和信息化部
[10] 闻邦椿. 机械设计手册[M]. 5版. 北京: 机械工业出版社, 2010: 3-44
[11] 田艳丽. 航空航天用热固性二硫化钼干膜润滑剂的研制[J]. 航天制造技术,2011(3): 3-5
TIAN Y L. Preparation of thermosetting MoS2dry film lubricant for aviation and aerospace use[J].Aerospace Manufacturing Technology, 2011(3): 3-5
[12] 吴东, 韦锡峰, 康纪军.某型号真空热试验污染问题排查及对策解析[J].航天器环境工程, 2009, 26(1): 77-79
WU D, WEI X F, KANG J J.Trouble shooting and analysis of strategies for satellite contamination in a vacuum thermal test[J].Spacecraft Environment Engineering, 2009, 26(1): 77-79
(编辑:冯露漪)
Design of tilt attitude simulator for thermal test ofChang’e-3 lunar rover on lunar surface
QIN Jiayong, PEI Yifei, WANG Jing, YIN Xiaofang, GAO Qinghua
(Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China)
In the process of the lunar rover moving on the moon surface, the surface undulations and the (1/6)gravity environment will affect the thermal control system of the rover, thus the ground experimental verification of the thermal control system is necessary. Based on the study of the adaptability of the movement mechanism in the vacuum and low temperature environment, a lunar attitude simulator for the thermal test of the rover is developed. The simulation device realizes the pitching and rolling simulations of the rover through two sets of screw lifting mechanism. During verification by two large-scale thermal tests of the lunar rover prototype and the flight model, the simulator has successfully completed the task. This study provides a basis for the design of kinematic tooling in the future thermal test.
lunar rover; thermal test tooling; tilt attitude simulator; vacuum and low temperature environment
V476.3; V416
B
1673-1379(2017)06-0656-06
10.3969/j.issn.1673-1379.2017.06.014
秦家勇(1982—),男,硕士学位,从事航天器热试验方向研究。E-mail: qjy_1134@126.com。
2017-05-25;
2017-12-05
国家重大科技专项工程
