航海导航参数计算方法及应用∗
2018-01-04黄丽霞
黄丽霞
1 引言
为了行驶安全,船舶航行时需按预置好的计划航线进行航行。计划航线由各个航路点组成,两相邻航路点之间的连线为一航线段。在一个航线段中,航海导航的具体任务就是引导舰船驶向当前航线段的目标点,要达到这个目的,必须实时计算两个最基本的导航参数:到目标点的距离和目标点的方位。有些场合,如测量作业、布扫雷作业等,在引导舰船驶向当前航线段目标点的过程中,要求船位始终保持在航线上,为此还必须实时计算船位偏离航线的距离,即航行偏航量,以指导操舵[1]。到目标航路点的距离、方位、船位偏离航线的偏航量3个参数是航路点导航的基本导航参数。这3个参数的计算可归结为下述两个问题:
1)已知起点P1(B1,L1)和终点P2(B2,L2),求由P1点航行至P2点的航程S和起始航向A1;
2)已知航段的起止点P1(B1,L1)、P2(B2,L2)和当前船位Pc(Bc,Lc),求Pc点相对航线P1P2的偏航量XTE。
航行偏差的计算方法与船舶航法相关,船舶航法包括多种,但在实际中,等角航法和大圆航法比较常用。一般来说,当航程较短时,为了便于规划,采用等角航法;当航程较远时,为了缩短航行时间,采用大圆航法[2]。选用不同的航法时,计算上述3种导航参数的方法也是不同的。
2 大圆航法导航参数计算
大圆航法即沿椭球的大地线进行航行,大地线的主题解算算法归纳起来有5大类共有几十种之多[3],其中,文森特(T.Vincenty)公式嵌套系数法是其中较为常用、适用于任意距离且精度较高的一种,常被用来作为验证其它算法计算精度的手段[4~6]。其计算方法如下:
2.1 大圆航法航程和航向角计算
文森特公式,也称嵌套系数法,采用贝塞尔球作为过渡,先将椭球面各大地元素按特定要求转换到辅助球面,并在球面上解算,推导出嵌套系数公式,然后通过椭球改正项把球面解算的结果再归算到椭球面上[7]。
P1(B1,L1)和P2(B2,L2)为椭球面上两点(如图1),B为纬度,L为经度,N为椭球极点。P0P1P2Pn是椭球面上大地线P1P2的延长线,P0点是该大地线与赤道的交点;Pn是大地线在其行程中最高纬度点,大地线在该点与纬圈相切。其它经、纬度和方位角如图1所示。取半径为1的圆球作为辅助球面如图2,球面上 P0'、P1'、P2'、Pn'分别为椭球面上各点在球面上的相应投影点;σ1、σ2、σ 为 S1、S2、S 对应的球面角距;ω为L对应的球面经差;u1、u2、ω1、ω2为 B1、B2、L1、L2对应的球面归化纬度和经度;由于大地线在球面上各投影点处的方位角与其椭球面上的相等,均用 A1、A2来表示 P1、P2的方位角和反方位角。
由上述的椭球面和球面的对应关系,可推导出大圆弧σ与大地线S、球面经度差ω与椭球面经度差L之间的关系式:
式中,b、e分别为椭圆短轴和椭圆第一偏心率。
文森特公式以式(1)、式(2)这两个基本公式为出发点,利用二项展开式中的函数幂及其系数本身所具有的叠乘性质,通过嵌套约化,推导出计算椭球改正项的三个嵌套系数K1,K2,K3和两个叠乘性质改正数Δσ、Δω[8]。
文森特公式在大圆航行算法应用中,其具体的计算步骤如下:
1)由以下公式计算P1、P2点归化纬度 u1,u2:
其中 f为椭圆偏心率。
2)计算出P1到P2点经差L对应的球面经差ω:
3)通过下式计算P1到P2点大地线长S对应球面角距σ:
4)通过下式计算过P1、P2点大地线临界点Pn的归化纬度un:
5)通过下式计算P1、P2点大地线中心角距σm:
需注意,计算时首先判断un是否为0,若为0则按σm=Δσ/2计算,否则根据上式计算σm。
6)通过下式计算经差改正项Δω
按步骤2)~6)式迭代直至Δω的变化小于限差(根据一般航海导航要求,精度取到10-3s或10mm时足够,因此限差取10-8即可)。
7)计算嵌套系数t、K1、K2和Δσ
式中e'为椭圆第二偏心率。
8)计算 P1到P2点大地线长 S:
9)计算正方位角A1:
10)计算反方位角A2:
上列式子中凡是有*的地方,均要判断其角度所在象限来进行改正。
2.2 大圆航法的偏航量计算
图3中,P1、P2等同名变量的定义与图1中相同,设P1、P2分别为大圆航法中某航段的起点和终点,A2为航段P1P2的反方位角;Pc点为当前船位,偏航量XTE为Pc到航段P1P2的最短距离,求解XTE。
在实际的海航中,航线一般被分为多个航路点,相邻航路点之间的距离及偏航量都较小(偏航量一般不大于10km)[8]。因此,在工程应用中,在计算偏航量时可将地球近似看作正球体,取地球平均半径R=6371km,以大圆弧长代替椭圆弧长,按球面直角三角形公式计算偏航量。具体步骤如下:
1)按2.1节的公式计算出航段P1P2的反方位角A2;
2)按2.1节的公式计算出航段PCP2的航程d及反方位角Ac2;
3)计算XTE对应的角度
4)根据球面直角三角形公式计算出XTE:
3 等角航法导航参数计算
等角航法,也称为墨卡托航法。等角航法航路段在墨卡托投影图中是一条直线段。直线段与正北的夹角为等航向角,也表示该航路段的计划航向。等航向法航行偏差的计算在墨卡托投影坐标系内完成。
如图4所示,P1P2为一等角航线,起点P1、终点P2的大地坐标分别为(B1,L1)、(B2,L2),A为航向角,P1P3和 P4P2为两条平行圈,P1P4和 P3P2为两条子午线。在如图4的椭球面微分三角形P1P2P3中,其等角航线的微分方程式为
其中:M为子午线曲率半径;N为卯酉圈曲率半径。
3.1 等角航法航向角计算
将式(20)与式(21)相除后可得
由地图等角投影理论可知
其中:q为等量纬度[9],将式(23)两边积分得
式中
由式(25)可求出航向角A,航向角A的象限确定方法如表1所示。
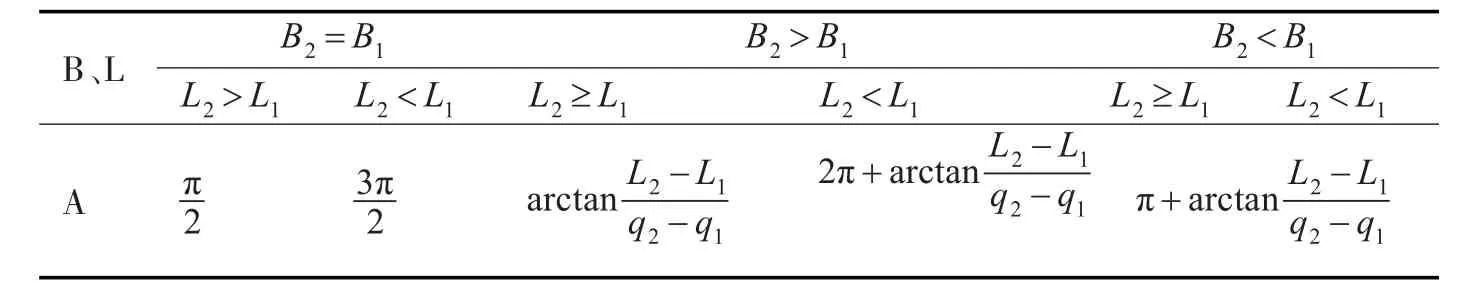
表1 等角航法航向角象限判定
3.2 等角航法航程计算
将式(20)两边积分,可得等角航线长度
则有
由式(27)可求出航程。
当A=π 2或3π 2时,可利用下式计算等角航线长度:
3.3 等角航法的偏航量计算
如图5,某航段起点分别为P1(B1,L1)、P2(B2,L2),当前船位PC(BC,LC),则可求出航段P1P2的航向角为A。在航段P1P2上找到一点PD,使之纬度与Pc点相同,当tanA存在时,由式(25)可求出PD点的经度LD为
根据PC、PD的经度差可求出PC、PD间的距离d
则根据球面三角公式可求出偏航量:
当航向角A=π 2或3π 2时,即沿纬度平行圈航行时,偏航量XTE=d,即为子午线弧长差,则可用式(28)直接计算。
4 算例分析
为了验证本文所用算法计算导航参数的正确性,用文献[11]中的算例来对比分析。已知航段起点P1坐标为(33°00′00″,120°00′00″),终点P2坐标为(34°00′00″,121°00′00″),当前船位PC为(33°59′02″,120°57′13″),求航段航程、航向角及偏航距。使用克拉索夫斯基椭球体参数,得到计算结果如表2所示。

表2 导航参数计算对比
从表2的计算结果可看出,本文所用大圆航法的计算结果,与文献中参考值相比,航向误差率为0;航程误差率为2.76E-6,差别很小;偏航距误差率为3.78E-5,这些差异均在合理可接受的范围,体现了不同算法的计算误差;而等角航法的计算结果也在合理范围内;表明了大圆航法和等角航法算法应用的正确性。
5 结语
本文研究了航海中经常用到的大圆航法和等角航法,针对航行导航所需,对两种算法中的航程、航向角、偏航距等参数给出详细的计算过程,并通过计算算例验证了算法应用的正确性。其中两种算法中的航程和航向角计算精度较高,可直接作为航海导航的电算化应用,对海上导航仪的航迹计算和航线设计等功能的开发有实用参考价值。
[1]陈永冰,周永余.航路点导航参数计算[J].海军工程学院学报,1997,(2):48-53.
[2]赵仁余.航海学[M].北京:人民交通出版社,2009.373-375.
[3]丁士俊,杨艳梅,史俊波等.大地主题解算几种不同算法在计算中应注意的问题[J].黑龙江工程学院学报:自然科学版,2013,27(3):1-5.
[4]杨致友.罗兰导航数学方法[M].西安:西北工业大学出版社.1991.151.
[5]房慎冲,范荣双,陈丽等.一种大椭圆航法导航参数计算方法研究[J].测绘科学,2015,40(5):21-25.
[6]吴腾飞.基于椭球面大尺度表达地表对象方法研究[D].西安:西安科技大学,2011:9.
[7]Vincenty T.Direct and inverse solution of geodesic on the ellipsoidwith application of nested equations[J].Survey Review,1975,23(176):88-93.
[8]张学廉.嵌套系数法—精密解算任何距离大地主题[J].武汉测绘学院学报,1985,(1):78-91.
[9]李厚朴,边少锋.等量纬度展开式的新解法[J].海洋测绘,2007,27(4):6-10.
[10]边少锋,许江宁.计算机代数系统与大地测量数学分析[M].北京:国防工业出版社,2004.
[11]陈金平,刘广军.基于椭球面的航线确定与导航参数计算[J].全球定位系统,2001,26(3):40-42.
