海上遇险目标漂移与搜寻区域优化确定分析∗
2018-01-04王光源刘建东章尧卿毛世超
王光源 刘建东 章尧卿 毛世超
1 引言
我国拥有约300万平方公里的辽阔海域,跨越热带、亚热带和温带,是东北亚地区通往世界各地的主要海上交通要道。随着我国海上交通运输与海上经济开发活动的不断发展,以及海上军事训练活动的延伸拓展,在遭受热带气旋、寒潮、海雾等恶劣海洋天气影响,以及海上突发的船舶碰撞与军事冲突等,极易带来各类海难事故的发生,严重威胁海上遇险人员的生命安全[1~2]。遇险目标失去自身动力后,漂浮和移动状态会不断变化,在海风、海流联动下呈现出带随机性运动。因此,快速确定遇险目标所处海域,将有效帮助搜救人员及时掌握遇险目标所处海域海情信息,制定科学的搜救方案,有效控制事态发展,提高海上搜救效率和成功率[3~4]。
海上遇险目标产生漂移运动主要受到海流和风压影响,本文根据遇险海域海流和风压的矢量特性,通过矢量叠加方法,估算出遇险目标所在的可能位置,进一步估算出搜索半径,从而确定搜寻区域。
2 遇险目标受力分析
海上遇险目标在自身失去动力且忽略垂直海面方向运动的前提下,其在海面上的水平漂移主要受海风、海浪、表层海流的共同影响[5]。根据牛顿力学定律,海上漂移目标的运动加速度关系为
其中,V为遇险失去动力目标的漂移速度,Fa为海风施加的外力,Fw为海浪的推动力,Fc为表层海流的涌动力,m为海面遇险目标的质量,m'为目标表面附着的水粒子的加速度所产生的附加质量。k为附加质量的系数,其取值与搜寻的遇险目标的几何外形有关[6](圆柱体 k=1,球体 k=0.5 ,长轴:短轴=2的椭球体k=0.2)。
其中,Cd为海面风施加的外力的系数(主要与目标的外部形状有关),ρa为海面上空的大气的密度,Aa是遇险漂流目标处于海面上方的部分在迎风垂直面上的投影的面积,Wa为海面上空海风的速度。
式中,Ciw是遇险海域海面海波浪的反射系数,g是重力加速度,A是该海域海浪上下波动的幅度,ρw是海水的密度,Lt是遇险目标的长度。Fc=1/2⋅CcdρwAwVb(4)式中,Ccd是海面洋流的推动力的系数,Aw为遇险漂流目标处于海面水下部分垂直洋流方向的投影面积,Vb为遇险目标相对于海水的漂移速度。
在遇险漂流目标长度(通常认为50m以下,包括船体残骸、坠海人员、救生橡皮艇、落水直升飞机等)比海面波浪的波长小的情况下,海波浪的辐射力Fw通常可以忽略,也就是Fw为0[6]。海上遇险目标在漂移最初阶段,受到外力的作用,会出现加速很快的现象(瞬时加速度可以理解为无穷大),随着时间的推移,漂移目标受到的外力趋于平衡,漂移速度相对稳定,加速度可以近似为0。
将式(2)、(4)代入式(5)整合可得:
式子左边部分的大小是由遇险海域海风的速度决定的。因此,根据海洋环境信息中的遇险海域的风场数据信息和漂移目标的本身参数信息就可以推算出遇险目标相对于海水的漂移速度Vb。
3 遇险目标海上漂移模型
遇险目标的海上漂移速度是目标相对于海水的速度与目标所处海域海流速度的矢量叠加[7],如下式:
式中,Vrelative是遇险目标与海水的相对速度,Vcurrent是表层海流速度。Vrelative包含的是遇险海区海风、海浪对目标海上漂移速度的影响。当遇险目标尺寸与周边海浪的波长相比较小时,可以忽略海浪的影响[8~9],海风引起的漂移由Vrelative体现(Vrelative又称风致漂移速度,也称为风压,而Vcurrent则主要由表层海面的海流影响)。Vcurrent通常由海面表层海流和海浪导致的漂移两者组成。对于大型海上遇险目标,海浪的影响比较明显,必须要进一步分析,本文主要研究的是长度小于50m海上遇险目标的搜寻,可以忽略海浪的影响。
假设V1为遇险海区表层的海流矢量流速,V2为海风引起的遇险目标的漂移矢量速度,用V表示遇险目标漂移的速度矢量是
可得目标的漂移模型:
4 风压模型
风压(Leeway),洋面也称风压差,是遇险目标暴露在水面以上部分的在海风的作用下所产生的相对海水的运动,具有方向性,风压的大小就是运动速度的大小。风压角表示风压的方向,按照海风下风方向,左用负表示,右用正表示。影响风压的因素主要有遇险目标的大小和尺寸,以及目标本身的入水体积与整体的比值。Allen在研究论文[9]的研究成果基础上将风压分解为crosswind和downwind两个方向,两者相互垂直,图1为风压矢量的分解示意,L为整体风压的矢量,Lα为风压角,Ld为下风方向风压(downwind)矢量,Lc为横风方向风压矢量(crosswind)。
根据有约束和无约束两种情况,风压可用无约束风压模型(Y-Model)和有约束风压模型(0-Model)[5]表示。 Y-Model模型依据实验数据统计回归建立,但它仅是“原点”,也就是风速为0的时侯风压并不为0,不符合常识,因此需要将风速很小(或为0)的情况下的风压做特殊考虑。0-Model模型经过“0点”,风速很低(为0)时会产生不能忽略的较大误差。
Y-Model模型中,Ld,Lc与海平面上的海风风速之间的关系式是:
0-Model模型中,Ld,Lc与海平面上的海风风速之间的关系式是:
式中,W10为海面风速;ad,ac,bd,bc是回归系数。ad和ac为downwind矢量与crosswind矢量对应的海面风速的斜率,bd,bc为downwind矢量与crosswind矢量对应的偏移量。漂移目标沿下风偏移左右方向不同,ac和bc系数取值不同。式(12~13)过原点,其downwind矢量与crosswind矢量对应的偏移量bd和bc为0。由实验表明,最初状态下漂移目标的下风偏移在左右两个方向上具有相同的概率,无法在漂移运动前确定其漂移的准确方向,随着目标沿某一方向发生了漂移运动,风压的实际方向就会以4%~6%/小时的变化概率改变,且方向的改变、发生的概率与目标的自身没有关系。对于航空搜寻,一两个小时内方向改变的概率相对很低,所以在计算的时候可以认为一旦遇险目标开始漂移,它的漂移方向就不再改变。图2为目标海上漂移方向、大小的矢量计算图。
5 遇险目标漂移位置模型
假定指挥中心接收到的海上遇险目标最后已知位置信息为P(a0,b0),从此刻开始无人机飞行到出事海域航行时间为t,据海洋环境数据查到的海流速度大小为V流,与正东方向为γ,风压导致漂移速度为V风,与正东方向为α(α≤π 2),左右风压角为 β,与以P点为原点,正东方向为x轴,正北方向为 y轴,建立直角坐标系[7]。经过t时刻目标的理论漂移位置根据风压的左右概率50%应有两个理论基准点,分别是P1(xt1,yt1) 和 P1(xt2,yt2),如图3。
T时刻,P1( )xt1,yt1坐标应该是:
P1(xt2,yt2)坐标应该是:
最终基准点相对于最后已知位置的确定坐标Pt(xt,yt) 即为
最后经过直角坐标系与大地坐标系的转换和叠加就能得出遇险目标的经纬度坐标。
6 确定搜寻区域
根据基点Pt( )xt,yt确定搜寻区域,首先以 Pt为圆心,作半径为搜寻半径R的圆,然后对该圆的做外切正方形,即为搜寻区域,如图4。
搜寻半径R的确定是由总搜寻误差和搜寻安全系数相乘[10]得到,即:
其中,E为总搜寻误差,与初始位置误差E0和搜寻设备位置误差E1有关。 f0为搜寻的安全系数,它随着同一区域搜寻次数的增加而增加[11],取值可参考表1。
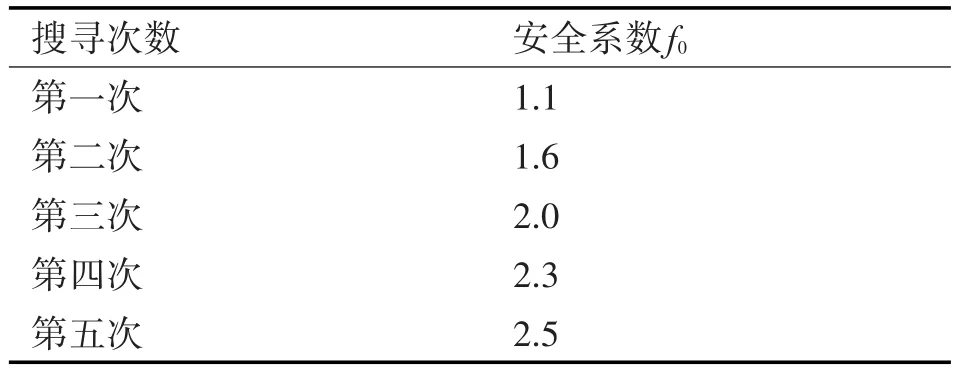
表1 安全因数[12]
总搜寻误差E为
初始位置误差为
其中Fx0为搜寻目标定位误差,取值可参考表2,Rx0为目标航迹推算误差,大型船一般取推算航程的5%,小型艇一般取15%。搜寻设备及误差E1=Fx0+Rx0,取值和意义参考初始位置误差的解释。

表2 定位误差
7 结语
快速搜寻发现遇险目标是海上搜救解决的首要核心问题,在分析海上风与流的气象水文要素特性基础上,根据海洋风流要素变化和遇险海域风压差、流压差的方向和大小,对海上遇险目标进行受力分析,建立了遇险目标漂移模型和风压模型,以矢量迭加的方法估算出遇险目标海上漂移的方向和速度,通过漂移位置模型,分析估算出遇险目标位置的漂移变化,并进一步求出搜寻半径,确定最佳有效的搜寻区域。该模型有助于快速制定科学的搜救方案,有效地配备海上搜救力量,降低遇险目标失事风险,具有较高帮助与参考价值。
[1]王亚男.马航搜救对民航业及我军装备发展的启示[J].国防科技工业,2014(4):22-25.
[2]李小文.海上搜救服务系统有效性评价[D].大连:大连海事大学,2012:1-5.
[3]孔凡郁,阮巍.我国海上搜救管理体系探析[J].水运管理,2004(7):22-25.
[4]王平庄.海南海上搜救概况与分析[J].中国应急搜救,2007(1):12-14.
[5]中华人民共和国海事局.国际航空和海上搜寻救助手册[S].北京:人民交通出版社,2003:198-206.
[6]梁挥凡.大风浪条件下海上搜救的方法[J].中国应急救援,2008(2):24-25.
[7]于卫红,贾传劳.海上搜救中搜寻区域确定方法研究[J].中国航海,2006,67(2):34-37.
[8]Anderson E,Odulo A,Spaulding M.Modeling of Leeway Drift[R].Groton:U.S.Coast Guard Researeh and DeveloPment Center,1998:128-130.
[9]Wang Yi,Fan Wei,etal.Effct of atmospheriec and ground condition on the target-backgound contrast[J].Chinese Journal of Quantum Electronics,2004,21(1):92-97.
[10]R.Koester,D.C.Cooper,Sweep Width Estimation for Ground Seareh and Reseue[R].Potomaemanagement GrouP,Ine,Deeember,2004:53-55.
[11]宋旭升,夏军等.直升机海上搜救与光电稳定转塔[J].中国水运,2012(1):109-111.
[12]陈明东.海上搜寻技术研究[D].大连:大连海事大学,2007:62-63.
