基于力学分析的470级帆船转舵应用研究
2018-01-04蔺世杰郑伟涛贺阳映唐吉涛雷晓珊
蔺世杰,马 勇,郑伟涛,贺阳映 ,唐吉涛 ,雷晓珊,张 松 ,邱 斌
LIN Shi-jie1,2,MA Yong2,ZHENG Wei-tao2,HE Yang-ying1,2,TANG Ji-tao3,LEI Xiao-shan1,2,ZHANG Song1,2,QIU Bin1,2
基于力学分析的470级帆船转舵应用研究
蔺世杰1,2,马 勇2,郑伟涛2,贺阳映1,2,唐吉涛3,雷晓珊1,2,张 松1,2,邱 斌1,2
LIN Shi-jie1,2,MA Yong2,ZHENG Wei-tao2,HE Yang-ying1,2,TANG Ji-tao3,LEI Xiao-shan1,2,ZHANG Song1,2,QIU Bin1,2
帆船船体及附体的水动力性能对运动成绩具有重要影响,而舵是470级帆船运动时调整航向和平衡帆船的重要附体。为了得到470级帆船舵的水动力特性,基于计算流体力学方法(Computational Fluid Dynamics,CFD),采用雷诺平均纳维尔-斯托克斯方程(Reynolds-averaged Navier-Stokes Equations,RANSE)对470级帆船船舵组合体的粘性流场进行了模拟。研究表明,在排水量为280 kg、航速为2 m/s~8 m/s时,舵的失速角为30°;随着航速的增加,船体尾流将影响舵体有效面积和展弦比,当航速为10 m/s时船舵组合体舵失速角为35°;舵角在10°~25°时舵体升阻比较高。帆船比赛中如果要进行较大角度转向,建议舵角为30°~35°;当帆船比赛中接受绕圈判罚时,可以提高帆船速度,同时采用升力系数较大的舵角进行回转,这样可以有效地节约处罚所耗费的时间。结合帆船运动规则和帆船航行路线,基于数值模拟结果探索了舵在帆船转向、绕标和挣脱判罚时的应用规律。
470级帆船;舵;水动力;失速角;数值模拟
1 研究背景
国内、外学者通过对运动器材动力性能的研究,使运动员能够熟悉运动器材的整体操作性能,从而更加高效地完成技术动作[1,6,11]。470级帆船是一种双人竞速帆船,是奥运会、世界帆船锦标赛等赛事的重要比赛项目之一。帆船比赛是在一定海域复杂海况下进行的场地航线绕标赛,每场比赛要经过多轮次逆风、顺风和横风的过程[11]。比赛中帆船运动员通过调节帆翼系统和船体系统来调整帆船船体的姿态和帆船航行方向。对帆船器材性能的了解可以使运动员在比赛中更加合理地调整帆船器材,对帆船进行良好的操控,保证帆船航行中具有较小的阻力,使得帆船按照意图保持航向,按照较优的航线完成比赛[11]。
舵作为470级帆船中调整航向和平衡帆船的重要附体,其水动力性能对帆船保持航向、偏转、绕标等过程有较大的影响。在比赛时,诸多运动员都失败在起航、绕标等关键的帆船航向调整上。同时在帆船比赛中也存在很多判罚,要求运动员及时完成相应的处罚[8,9],挣脱判罚后尽快调整船体姿态和航向,继续进行比赛。判罚耗时的缩短对于帆船多轮次比赛的取胜是非常有意义的,缩短时间建立在对于舵体良好操纵的基础上。所以,科学系统的研究舵的操纵,有效将舵的基础性研究与实际比赛应用相结合,对于赢取比赛有较好的指导作用。
随着计算机速度和容量的大幅度提高、数值计算方法的不断完善,基于数值模拟方法进行船体及其附体水动力性能预报的精度越来越高。对于船体研究,如,通过求解雷诺平均纳维尔-斯托克斯方程(Reynolds-averaged Navier-Stokes Equations,RANSE)研究“美洲杯”帆船赛上全装备帆船(帆、船、舵、稳向板),分析逆风、顺风时两条帆船并行的相互作用和优化方案,研究结果为“阿林西号”夺冠“美洲杯”帆船赛做出了贡献[14];研究Laser船体不同纵倾角度下船体的变化规律,得到船体的最佳纵倾角度[3];利用计算流体力学(Computational Fluid Dynamics,CFD)方法研究不同攻角下470级帆船稳向板的水动力性能,计算不同航速下稳向板与船体的相互作用和影响,并结合帆船比赛路线进行稳向板调节的应用分析[5]。
基于智能CAD样条曲线修复优化表面技术,自主开发软件进行船体的附体设计,模拟设计后附体的水动力性能,分析升阻比符合GAs标准,CAD设计的优化稳向板,在国际级5O5小帆船中得到应用[10]。利用大涡模拟(Large Eddy Simulation,LES)方法和分离涡模拟(Detached Eddy Simulation,DES)方法对“美洲杯”帆船船体进行水动力性能的研究,模拟结果比试验结果小且对时间步长有较大的要求,用LES模型能够更加准确的模拟近壁面流动[15]。
也有学者通过模型试验或者实船试验,并结合数值模拟方法对帆船的动力性能进行研究。针对帆板和帆翼项目进行器材流体性能的试验研究,发现帆板纵、横倾状态下的阻力随速度的变化规律和帆翼拱度、攻角、扣角、有无桅杆等对帆翼的空气动力性能的影响,明确了数值仿真计算域的处理方式和湍流模型对帆翼数值模拟精度的影响,提出了帆船在起航横尾风航段标旁附近的调帆策略[4,12]。通过海上测量和帆船运动力学分析,自主研发可视化分析三维交互仿真软件,将帆船运动全面呈现,为帆船运动训练和制定战术路线提供技术支持[2]。采用拖曳水池对1:4的Aura多体帆船的船体船模进行研究,发现船员最优位置在船中后部40%船长的位置,船员移动过程中船体的弗劳德数Fr从0.3~1.03;当Fr在0.4附近时,船体的阻力最大[15]。通过求解带自由液面的RANSE方程数值模拟和拖曳水槽试验结合的方法,研究了美洲杯第5代帆船船体的水动力性能,验证欧拉隐式的分界面插值法修正VOF(Volume of Fraction,VOF)方法获得稳定的结果[8]。
目前有关帆船水动力性能研究主要集中在以“美洲杯”为代表的大帆船研究,研究较为深入,内容涉及全装备帆船不同运动状态下船体性能优化、船体附体对船体性能的影响和数值仿真方法精度的完善等方面,有关奥运帆船的研究主要集中在帆船船体、稳向板、技战术分析、测量船体姿态等方面,但未发现帆船船舵的研究情况。
为了全面系统了解470级帆船舵在不同操纵方式下,舵与船体之间水动力性能的相互影响,明确舵的操控对帆船船体的操纵性、回转性和稳定性的影响,本研究基于数值模拟方法对470级帆船中船舵组合体的粘性流场进行了模拟,并将研究结果结合帆船运动规则、帆船航行路线,探索了舵在帆船转向、绕标和挣脱判罚时的应用规律。
2 研究方法
2.1 470级帆船模拟参数
470级帆船船体自重118 kg,两名运动员体重要求范围处于110~180 kg,本研究取整体280 kg的排水量时的吃水深度为研究状态。根据国家帆船队实际调研,在舵杆有效活动范围内,舵体的偏转角度范围大致为-40°~40°。研究对象是船体和舵体完全装配状态,船舵均通过全站仪测绘数据[7],经CAD和ANSYS 15.0处理建模,如图1所示,其中船舵展弦比为2.7、厚度比为0.2,船舵组合体具体参数及符号见表1:
本研究针对470级帆船船舵组合体进行多航速多舵角组合工况的数值模拟。航速和舵体偏转范围均通过国家帆船队实训时进行调研确定。其中,航速为:2 m/s、4 m/s、6 m/s、8 m/s、10 m/s,舵角为0°、5°、10°、15°、20°、25°、30°、35°、40°,分别对速度和舵角系列组合共45种工况进行船舵组合体的三维粘性流场数值模拟。

表1 470级帆船组合模型参数Table 1 Parameters for 470 Class Yacht

图1 470级帆船船舵组合体模型Figure 1. Model of Ship and Rudder for 470 Class Yacht
2.2 控制方程
假设船体及舵体周围的三维流场是不可压缩粘性流场,本研究的控制方程为RANS方程和连续性方程,在笛卡儿坐标系下连续性方程与动量方程的形式可表示为:
连续性方程:

动量守恒方程:

式中:ui和分别是平均速度和脉动速度(i=1,2,3),ρ表示流体密度,t表示时间,表示流体运动粘性系数,Bi表示体积力。表示湍流的影响。
2.3 计算域及边界条件
本文研究中数值计算域及边界条件如图2所示,在船舵组合的计算域中,设置入口与船首的距离为L,入口边界条件为速度入口,方向沿X轴负方向,速度大小分别为2 m/s、4 m/s、6 m/s、8 m/s、10 m/s,是470帆船航行常出现的速度;出口距舵后缘5L,出口边界条件为压力出口,易于数值计算的迭代收敛;左右边界距船中纵剖面3L,左右边界条件为对称面;底部距舵底端L,底部边界为滑移壁面;舵船壁面为无滑移壁面;水线为静水排水量为280 kg的水线高度。
2.4 网格划分
船舵组合体网格通过ICEM CFD 15.0软件进行划分,划分结果如图3所示,船舵组合体的计算域采用混合网格。在船舵组合较小区域采用非结构网格,基于非结构网格便于节点控制和自适应性的优点,快捷高效地解决了船舵组合体计算过程中舵角多变的问题,提高数值仿真的计算效率。在非结构化网格外是结构化网格划分较大的计算域,结构化网格的划分便于在保证计算精度的同时,降低整个计算域的网格总量,节约计算机资源。其中在非结构网格扑捉边界层方面,设置第1层网格尺寸和渐变参数,保证边界层满足到第1邻近网格的距离控制为y+=60~100,网格总量为500万左右。采用SST 模型结合壁面函数和VOF方法,模拟自由液面的船舵组合体壁面边界层附近的流场。

图2 470级帆船船舵组合体的计算域和边界条件Figure 2. Computational Domain and Boundary Conditions of Ship and Rudder for 470 Class Yacht
2.5 坐标系及水动力无因次化表达式
船舵组合体XY截面坐标系如图4所示,船头为X正方向,Z方向为水深方向。其中,来流方向为X负方向,大小为U。xe是舵转动中心距船体重心的距离2.52 m。α是舵的偏转角度,即舵角。
本研究船舵组合体中舵的水动力性能,主要讨论舵的升力、阻力和转船力矩的变化情况。水动力参数无因次化表达式如下:


式中:Lt是舵的升力,Dt是舵的阻力,M是舵的转船力矩,Rt是船体总阻力,Y是船体所受侧向力,U是速度,Ar是舵体的湿面积,xe是舵转动中心与船体中心的距离。

图3 470级帆船船舵组合体网格(a:计算域外围结构化网格; b:内部船舵组合体非结构网格)Figure 3. Mesh of Ship and Rudder for 470 Class Yacht(a:Peripheral structured mesh;b:Unstructured mesh of Ship and Rudder)

图4 船舵组合体XY截面的坐标系Figure 4. Coordinate System of Ship and Rudder for 470 Class Yacht on XY Cross Section
3 研究结果
3.1 舵升力
将舵数值计算结果中的升力进行无因次化转换,如图5-a舵体升力系数与舵角的关系。结果表明,在航速2~8 m/s,舵的升力系数趋势基本一致,在舵角从0°~30°期间,升力不断地增加,舵角35°和40°后处于升力不断降低。基于计算结果发现,航速2~8 m/s对应的舵的最大升力出现在舵偏转30°,即舵的失速角大约处于30°;航速10 m/s时,舵的升力系数在35°达到最大,舵的失速角为35°。当帆船航速达到一定程度时,航速对舵的失速角有影响。
图5-b是舵体升力值与舵角的关系,数值试验结果表明,航速越大,舵的升力越大,且升力值相差较大。在帆船实际比赛中,可以通过对舵角控制来选择舵的高升力对帆船操控。对于舵的操控有实际应用参考价值。
图6是470级帆船船舵组合体在航速10 m/s,舵角分别为25°、30°、35°、40°的自由液面云图,从云图发现,在舵的附近存在较低水位,且舵角在35°时,尾流不对称性最大。结合舵体升力与舵角关系分析,在航速10 m/s时,由于船速较快,使得船尾尾流冲击舵导致舵的有效湿面积降低,对应的展弦比降低,而使舵的失速角增加,导致在航速为10 m/s时,舵的升力在舵角为35°时达到最大值。
3.2 舵阻力
在帆船比赛过程中,优化操纵帆船姿态旨在整体比赛过程中获得优势,舵体阻力对帆船研究也非常重要。由图7-a舵体阻力系数与偏转角度的关系可以发现,随着舵角的不断增加,每个航速对应的阻力系数也不断增加,整体上舵的阻力系数与舵角的关系比较一致,其中航速为4 m/s时,在舵角35°时阻力系数最大。
由图7-b舵阻力的绝对值可以发现,在航速为4 m/s,舵角35°时,舵体阻力绝对值与整体阻力值变化规律符合。综合两图可以说明,随着舵角的增加,舵的阻力不断增加,随着速度增加,舵体阻力的增加幅度也不断加大,其中,在航速为4 m/s、6 m/s、10 m/s,偏转角度35°,阻力值有降 低趋势。

图5 舵体升力与舵角的关系(a:升力系数;b:升力值)Figure 5. The Relationship between the Lift Force and Rudder Angle(a:Lift coeff i cient;b:Lift value)

图6 船舵组合自由液面云图(航速10m/s;舵角分别是a:25°、b:30°、c:35°、d:40°)Figure 6. Free Surface Counter of Ship and Rudder(abcd indicate rudder angles of 25,30,35,40 degrees under speed of 10m/s)

图7 舵体阻力与舵角的关系(a:阻力系数;b:阻力值)Figure7. The Relationship between Drag Force of Rudder and Rudder Angle(a:Resistance coeff i cient;b:Resistance value)
3.3 舵转船力矩、升阻比
帆船转向主要依据于舵的转向效果,核心问题是舵的转船力矩,由于舵存在一定偏转角度,使得舵的两侧水流不对称而产生升力。图8-a是不同航速下舵的转船力矩与偏转角度的计算结果,由图可以发现,舵体转船力矩与舵升力系数和舵角的关系比较一致,在舵失速角之前,转船力矩较好;当舵发生失速后,舵的转船力矩明显降低;但是,相对小舵角时,舵的转船力矩依旧较大;舵体转船力矩随着航速的增加不断增加,其中,航速为10 m/s,偏转角度为35°时,舵的转船力矩最大。
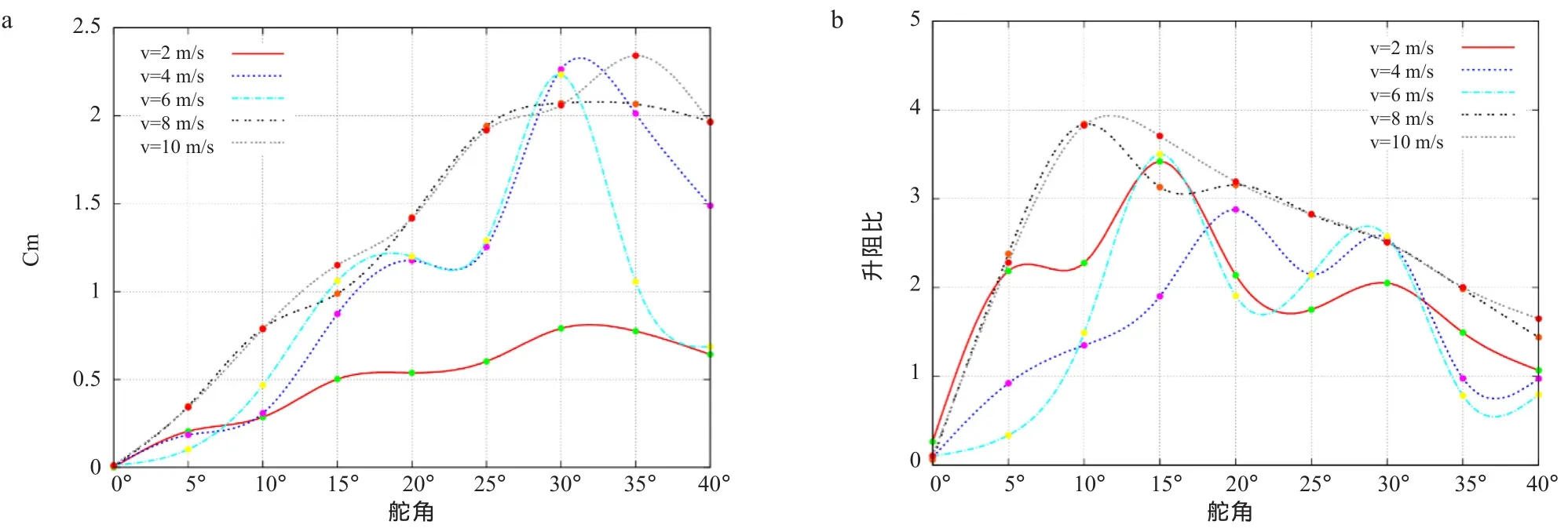
图8 舵体转矩、升阻比与舵角的关系(a:转向力矩;b:升阻比)Figure 8. Relationship between Rudder Torque,Lift-drag Ratio and Rudder Angle(a:Rudder torque;b:Lift-drag ratio)
图8-b是舵体升阻比与舵角的关系图,升阻比是反映船体快速性的指标参数。通过数值试验结果可以发现,航速不同时升阻比有所差距。航速2 m/s其升阻比最大值处于偏转角度15°;航速4 m/s其升阻比最大值处于偏转角度20°;航速6 m/s其升阻比最大值处于偏转角度15°;航速8 m/s和10 m/s其升阻比最大值处于偏转角度10°,且在舵角为25°时,升阻比系数仍然很高。综合发现,帆船在高升阻比时操纵保持船体快速性,随速度加大,舵体升阻比增加,随着速度继续增加时,船体快速性操作的偏转角度反而降低。总之,舵的高升阻比的舵角范围约为10°~25°。
4 分析与讨论
4.1 基于帆船比赛航线舵操纵应用的分析
帆船比赛时根据自然环境进行帆船航线的确定,基本航线主要包括梯形外绕航线和梯形内绕航线(图9)[7],梯形外绕航线中从起点到绕1标之间需要航向转60°,1标绕2标时要转向120°,2标绕过3标时需要转向180°。梯形内绕航线中也存在诸如此类的大角度调整船体的航向,在航向调整过程中,舵的合理操纵尤为重要。
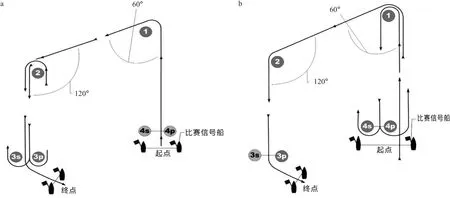
图9 梯形航线图(a:外绕;b:内绕)Figure 9. Trapezoid Courses(a:Around the outside;b:Around the inside)
除此航线规定转向外,在帆船实际比赛过程中存在逆风、顺风、横风等多种风况,优秀的帆船运动员会及时调整帆船航向,选择最经济的帆船比赛航线,过程中存在多次帆船航向的调整。其中,在逆风航行时,帆船均采用Z字形行进路线,有效的利用风使船体行进,在Z字形路线航行时,存在较大角度调整;在冲刺终点时,帆船需要从限制的两个浮标之间通过才算结束比赛,此时此刻,航向的调整是胜利的保证。
通过以上分析,可以发现,在帆船比赛过程存在180°等大角度改变航线,同时也存在对于船体路线的小角度调整等多种改变航向的可能。通过数值试验研究发现,舵在多种航速下的最大失速角为30°左右,航速为10 m/s时失速角可达到35°,此时的舵的转船力矩最大,所以进行较大角度航线变化时可采用接近失速角的大舵角转向。根据舵体升阻比系数与舵角的关系,结合试验结果可以发现,多种航速下舵角在10°~25°范围内,舵体的升阻比较大,有效的保证船体的快速性,可以将此舵角控制策略应用在逆风、顺风、横风等状态下进行小角度调整,既保证了航向的选择,又不损失船体的速度,有效地缩短完成比赛的时间。
4.2 基于挣脱帆船判罚舵操纵应用的分析
在帆船比赛过程中存在多种详细的规则,运动员需要时刻调整自己的航行路线。帆船比赛规则规定[9]:当船只在相对舷风行驶时,左舷风船要避让右舷风船;当船只位于同舷风相联行驶时,上风船避让下风船;帆船航行时需要保留他船避让空间等等,这些规则要求运动员有效的控制和调整己方的船体航向。在帆船比赛过程中,比赛有起航犯规、碰标等规定,一旦违规,参赛的帆船需要接受惩罚,起航违规时需要在规定时间内重回出发点开始此轮次比赛;帆船碰标后帆船需要重新绕标。接受惩罚中存在船体在小范围内进行绕圈等操纵,快速地完成惩罚重回比赛是赢取胜利的关键。
本研究基于数值试验结果进行了船体回转的应用分析(图10),基于系列舵角、系列航速的计算结果,选取船体回转时舵体操控最佳性能。试验结果表明,船体在回转过程中进行的圆周运动的路线是相差不大的,所以速度较快时,用时最少。对比不同速度下的船体回转轨迹可以发现,航速10 m/s舵角调整至35°时,回转效果最好,同时航速最快。根据实际情况,比赛船只被处罚时,船速可能不会太快,所以开始接受处罚时,尽可能地把船速度提高,在将舵角调整到临近最大升力角即失速角附近进行回转,这样可节约比赛时间。
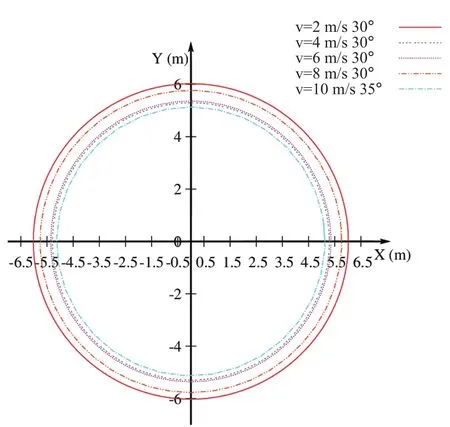
图10 不同速度的船体回转轨迹Figure 10. Ship Turning Trajectory with Different Speeds
5 研究结论
通过CFD方法对470级帆船船舵组合体进行多航速多舵角组合工况的数值模拟研究,分析了系列工况下舵的水动力性能。结合数值试验计算结果,分析了在航线改变、比赛犯规惩罚等方面舵的调整原则。研究表明,在面对帆船航线中大角度转向时,应尽可能选择舵的最大升力舵角,即30°~35°之间的舵角,使舵体提供最大的转船力矩;当帆船逆风、顺风、横风、冲刺终点时,操纵舵体使其偏转舵角在10°~25°范围,此时舵的升阻比较大,保持船体的快速性。当船只面临帆船绕标处罚时,尽可能地提高船体速度和采用最大升力的舵角进行回转,有效地节约挣脱判罚所耗费的时间。
[1] 陈炜,程亮亮,杨栋栋,等. 我国优秀赛艇女子单桨运动员实船运动生物力学特征研究[J]. 体育科学,2016,36(12):72-76.
[2] 纪鹏波,常晓峰,田丰林,等. 激光级帆船动力学建模与仿真[J]. 计算机测量与控制,2013,21(2):520-522,543.
[3] 蔺世杰,马勇,张志勇,等.不同纵倾角度下激光雷迪尔级帆船船体水动力性能研究[J].武汉体育学院学报,2016,50(1):90-93.
[4] 马勇,郑伟涛. 基于数值模拟的帆船起航阶段调帆策略研究[J]. 武汉体育学院学报,2013,47(1):58-61.
[5] 张志勇. 470级帆船稳向板的水动力性能研究[D]. 武汉:武汉体育学院,2016.
[6] 张子华,郑伟涛,马勇,等.基于CFD的赛艇阻力板空气动力性能数值模拟[J].体育科学,2012,32(4):35-40.
[7] 郑勤振,马勇,张志勇,等. 奥运会运动帆船船体外形测量的实验性研究[J].成人体育教育学刊,2015,31(6):76-80.
[8] BÖHM C,GRAF K. Advancements in free surface RANSE simulations for sailing yacht applications [J]. Ocean Eng. 2014,(90):11-20.
[9] BRYAN W. The Racing Rules of Sailing [M]. American:Wiley,2012:143-144.
[10] CIRELLO A,MANCUSO A. A numerical approach to the keel design of a sailing yacht [J]. Ocean Eng. 2008,(35):1439-1447.
[11] MA Y, TANG Y, WEST N,et al. Numerical investigation on trimming of a single sail in a regatta [J]. Sports Eng,2016,19(2):81-90.
[12] MA Y,ZHENG W T,HE H F. Evaluation of Hydrodynamic Performance of the Sailboard [C]//The 2007 Int Conference on Intell Pervasive Comput.Jeju Island,Korea,2007:468-470.
[13] MYLONAS D,SAYER P. The hydrodynamic flow around a yacht keel based on LES and DES [J]. Ocean Eng. 2012,(46):18-32.
[14] PAROLINI N,QUARTERONI A. Mathematical models and numerical simulations for the America’s Cup [J].Comput Methods Appl Mech Eng. 2005,(194):1001-102.
[15] VIOLA I M,ENLANDER J,ADAMSON H. Trim effect on the resistance of sailing planning hulls [J]. Ocean Eng. 2014,(88):187-193.
Investigation on Rudder Application for 470 Class Yacht Based on Mechanical Analysis
The hydrodynamic performance of the hull and appendage of the sailing boat is essential to improve the result in the sailing regatta and the rudder is an important appendage to adjust the course and balance the boat. In order to obtain the hydrodynamic characteristics of the rudder for 470 Class yacht,Reynolds-averaged Navier-Stokes Equations were used to simulate the viscous fl ow fi eld of the hull and rudder for 470 Class yacht based on the computational fl uid dynamics. It was indicated that the stalling angle of the rudder was 30 degrees when the displacement was 280kg and the speed was 2m/s to 8m/s. With the increase of the sailing speed,the wake fl ow of the hull would inf l uence the effective area and aspect ratio of the rudder. When the speed was 10m/s,the stalling angle of the rudder was 35 degrees. Lift-drag ratio will higher when the rudder angle was 10 degrees to 25 degrees. The rudder angle was 30 degrees to 35 degrees when a larger angle turn would happen in the sailing regatta. When a boat was making a penalty turn,it could effectively save cost penalty time if the speed of the sailing was improved and the rudder angle with the larger lift coeff i cient was used. The results of numerical simulation was applied to analysis of the rudder steering,passing each mark and getting rid of the penalty in the sailing regatta based on the racing rules of sailing.
470 Class yacht;rudder;hydrodynamics;stalling angle;numerical simulation
G804.6
A
2017-09-29;
2017-11-10
国家自然科学基金资助项目(51679183);湖北省自然科学基金杰出青年基金资助项目(2013CFA038);霍英东教育基金会高等院校青年教师基金资助项目(141112);湖北省高等学校优秀中青年科技创新团队计划资助项目(T201320);广东省体育局科研项目(GDSS2014155);武汉体育学院东湖学者计划;湖北省属高校优势特色学科群。
蔺世杰,男,在读博士研究生,主要研究方向为体育工程学、运动生物力学,Tel:(027)87192075,E-mail:shijielin900819@foxmail.com;马勇,男,教授,博士,主要研究方向为体育工程学、运动生物力学,Tel:(027)87191061,E-mail:mayong197803@163.com;郑伟涛,男,教授,博士,主要研究方向为体育工程学、运动生物力学,Tel:(027)87192018,E-mail:zhengweitao@sina.com。
1.武汉体育学院 研究生院,湖北 武汉 430079;2.武汉体育学院 体育工程与信息技术学院,国家体育总局体育工程重点实验室,湖北 武汉 430079;3.广东海上项目训练中心,广东 汕尾 516623 1. Graduate school of Wuhan Sports University,Wuhan 430079,China;2. School of Sports Engineering and Information Technology,Key Laboratory of Sports Engineering of General Administration of Sport of China,Wuhan Sports University,Wuhan 430079,China;3. Guangdong Marine Sports Training Center,Shanwei 516623,China.
