压电陶瓷迟滞神经网络建模与线性补偿控制*
2017-12-26许素安梁宇恩
许素安,金 玮,梁宇恩,张 锋
(1.中国计量大学机电工程学院,杭州 310018;2.浙江机电职业技术学院,杭州 310053)
压电陶瓷迟滞神经网络建模与线性补偿控制*
许素安1*,金 玮1,梁宇恩2,张 锋1
(1.中国计量大学机电工程学院,杭州 310018;2.浙江机电职业技术学院,杭州 310053)
针对压电陶瓷的迟滞非线性,本文首先进行实验测量得到压电陶瓷的位移迟滞数据;通过分析实验数据,引入线性方程实现压电陶瓷输入电压与输出位移关系的线性化,并建立了基于多项式拟合算法的神经网络迟滞模型;根据迟滞模型设计前馈控制器,分别采用了前馈开环和前馈结合PID的方法对压电陶瓷迟滞非线性进行补偿控制实验。实验结果表明,采用前馈开环控制,压电陶瓷位移主环迟滞减小了91.84%,位移次环迟滞减小了85.67%,位移跟踪的平均相对误差为2.97%;采用前馈结合PID控制,压电陶瓷位移主环迟滞减小了96.42%,位移次环迟滞减小了88.44%,位移跟踪的平均相对误差为2.04%。证明了该控制方法能有效地抑制压电陶瓷的迟滞非线性。
迟滞非线性;神经网络;前馈;控制
压电陶瓷驱动器是微位移机构的主要驱动装置,而微位移技术是精密仪器和精密机械的核心技术之一。压电陶瓷具有机电耦合效率高、位移分辨率高、响应快等优点,被广泛应用于微机械、微电子、精密加工、生物医学、机器人和航空航天等领域[1]。但其固有的迟滞非线性严重影响了系统的控制精度和稳定性。针对压电陶瓷的这一问题,许多国内外的学者对其进行了大量研究,提出了迟滞建模和抑制迟滞非线性的方法。
当前,Preisach模型[2]和PI(Prandtl-Ishlinskii)模型[3]应用较为广泛,原理简单,但实现形式较为复杂且难以实现在线控制;改进型PI迟滞模型结构相对简单,但积分环节使模型复杂化[4-5];迟滞多项式模型,例如利用极坐标[6-7]或最小二乘法原理[8]的方法进行建模,方法简便,但存在分段建模的局限性,模型误差较大。利用神经网络等智能模型,例如引入迟滞算子扩展神经输入空间[9-11]或采用多项式拟合算法的方法[12]将迟滞非线性的多映射转换为一一映射,模型简单、精度较高且适应性较强。
目前,对压电陶瓷迟滞非线性进行补偿控制的方法多采用基于迟滞模型的前馈开环控制或闭环控制。开环控制较为简便,响应速度较快且易于实现,但控制精度相对较低;闭环控制使控制精度得到提高,但增加了系统的复杂性,反馈环节容易引起系统的不稳定[13-14]。
综合关于压电陶瓷迟滞非线性建模和迟滞补偿控制的方法,本文首先通过实验测量得到压电陶瓷的位移迟滞数据;然后分析实验数据,引入线性方程实现压电陶瓷输入电压与输出位移关系的线性化[15],并建立基于多项式拟合算法的神经网络迟滞模型;最后根据迟滞模型设计前馈控制器,分别采用前馈开环和前馈结合PID的方法对压电陶瓷迟滞非线性进行补偿控制实验,有效地抑制了压电陶瓷的迟滞非线性。
1 迟滞模型
人工神经网络是由大量的网络节点相互联接来模拟人脑神经元网络的一种运算模型,具有自学习能力、 联想存储功能以及容错能力强等优点,经典的BP神经网络已经在实际工业中得到广泛的应用和验证。本文采用多项式拟合和BP前馈神经网络相结合的方法建立压电陶瓷迟滞模型。
1.1 系统装置
压电陶瓷位移测量采用双频激光外差干涉法,该测量方法具有抗干扰能力强、可溯源性等优点。实验中双频激光干涉仪的型号是ZYGO-ZMI2000,理论分辨率为0.309 nm;压电陶瓷的型号是AE0505D16F,理论分辨率为100 nm/V,最大位移是17.4 μm,最大驱动电压是150 V;气浮隔振台的型号是SPFO-I-B,固有频率垂直方向小于1.5 Hz,水平方向小于2 Hz,减小了振动等对实验结果的影响;压电控制器作为压电陶瓷位移驱动装置,型号是THORLABS BPC301,可通过程序控制提供0~150 V的驱动电压;整个控制系统的运行由C#编程进行控制。如图1所示为控制系统的实物图。

图1 控制系统的实物图
1.2 迟滞位移的测量
压电陶瓷迟滞位移的测量应用双频激光外差干涉法的原理,通过实验获得该压电陶瓷的驱动电压与对应位移值的数据。
本文利用C#编写的压电陶瓷位移测量程序控制压电控制器对压电陶瓷施加间隔为1 V的0-60-0 V、0-30-0 V的三角波形电压值,每间隔25 s电压变化1 V;同时,每间隔0.5 s对每个施加电压下的压电陶瓷位移量采集一次,可连续采集50次并显示,得到如图2所示的压电陶瓷位移测量程序图,图中曲线为压电陶瓷的位移-数据采集个数曲线。

图2 压电陶瓷位移测量程序图
首先,对每个电压下采集得到的50个位移数据进行求平均计算来减小系统误差,从而得到建模所需的压电陶瓷的输入电压与输出位移数据对。然后,通过MATLAB对获得的数据对进行绘制,得到如图3所示的压电陶瓷迟滞特性曲线,其中实线为上升曲线,虚线为下降曲线。由电压0 V到饱和电压之间升降压过程的闭合位移曲线称为迟滞主环,由电压0 V到某个小于饱和电压的电压值之间升降压过程的闭合位移曲线称为迟滞次环。迟滞环的宽度是指上升曲线和下降曲线对应位移之差的最大值,求得压电陶瓷位移迟滞主环的宽度为1 049.948 nm,迟滞次环的宽度为367.382 nm。
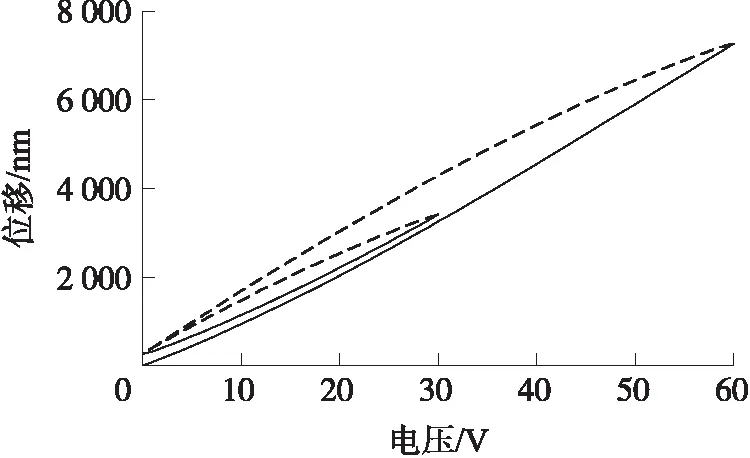
图3 压电陶瓷迟滞特性曲线
1.3 迟滞模型的建立
1.3.1 多项式迟滞模型
本文针对压电陶瓷的迟滞非线性,利用多项式拟合的方法对压电陶瓷迟滞特性曲线进行辨识和建模。根据1.2节中所求取的压电陶瓷输入电压与输出位移数据对,运用MATLAB进行基于最小二乘原理的曲线拟合。当拟合多项式为四阶时,拟合精度较高,从而建立压电陶瓷迟滞多项式模型。将压电陶瓷的实验迟滞曲线与拟合曲线对比,得到如图4所示的压电陶瓷迟滞多项式拟合结果,其中,实线为实验曲线,虚线为拟合曲线。

图4 压电陶瓷迟滞多项式拟合结果
此时的拟合得到的迟滞数学模型如式(1)~式(4)所示.
主环上升曲线模型:

(1)
主环下降曲线模型:
(2)
次环上升曲线模型:
(3)
次环下降曲线模型:
(4)
式中:u1、u2、u3、u4为多项式模型的输出电压;d1、d2、d3、d4为实验位移输出值,公式中的实验位移输出值的单位为微米。
1.3.2 神经网络迟滞模型
利用多项式拟合的方法建立的压电陶瓷迟滞模型只能分段进行,且压电陶瓷迟滞具有多映射性,所以,在此基础上,构造一个两输入单输出的压电陶瓷迟滞神经网络模型,既解决了分段建模可能引起的较大误差,也可以将多映射的迟滞非线性转换成一一映射。具体方法是将多项式拟合得到的输出电压u1、u2、u3、u4与实验位移输出值d1、d2、d3、d4作为神经网络的输入数据,而实验输入电压作为神经网络的输出数据,从而建立基于多项式拟合算法的神经网络迟滞模型。
压电陶瓷迟滞神经网络建模首先需对建模数据进行标准化处理。神经网络的输入输出数据差值较大,因此为了提高模型精度,加快模型收敛速度,需要将神经网络的输入与输出数据进行归一化处理,使输入与输出分布在[-1,1]之间。我们利用C#定义了premnmx函数实现相应实验数据的归一化计算和处理。
然后,确定BP神经网络模型的层数及各层相应神经元参数。三层结构的神经元可以逼近任意的连续函数,因此模型选择含有输入层、隐层和输出层三层网络结构。采用试凑法来确定各层相应神经元参数值,将隐层神经元数目设定为10,训练的目标误差为0.0005,利用C#编程建立压电陶瓷迟滞神经网络模型,经过数据处理后得到如图5和图6所示的神经网络建模结果,图中实线为实验曲线,虚线为神经网络的输出曲线。该迟滞神经网络的建模误差在0.42 V以内,平均相对误差为0.66%。

图5 基于多项式拟合的神经网络辨识
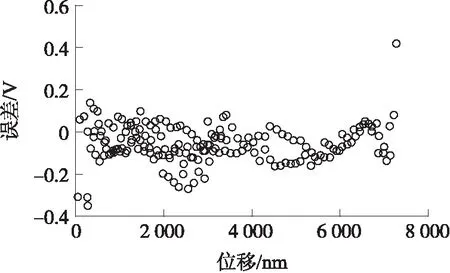
图6 基于多项式拟合的神经网络辨识误差
2 控制算法及实验
本文实验中的压电陶瓷迟滞补偿控制系统分为前馈开环控制系统和前馈结合PID复合控制系统。前馈控制能够使被控对象的输出值在出现偏差前进行控制调节,是一种预测控制:反馈控制是在输出值出现偏差后进行控制调节,因此具有一定滞后性。前馈结合PID复合控制既利用PID提高系统精度,又利用前馈克服了反馈中的时间滞后性。此控制系统只需要计算控制量的增量,因此,PID算法采用离散化的增量式PID,其表达式如式(5)所示:
Δu(k)=u(k)-u(k-1)=Kp[e(k)-e(k-1)]+
Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]
(5)
式中:Kp、Ki和Kd分别是比例、积分和微分系数e(k)、e(k-1)和e(k-2)为期望值与实际输出之间的误差值。
2.1 前馈开环控制
前馈一般有基于给定的前馈和基于扰动的前馈两种,本次实验采用的是给定的前馈开环控制方法,如图7所示为前馈开环控制系统结构图。

图7 前馈开环控制系统结构图
图7中,u(t)是系统的输入电压,为间隔1 V的0-60-0 V、0-30-0 V的三角波形电压值,且每间隔25 s电压变化1 V;d(t)是系统的位移输出值;f(t)是期望位移。
若压电陶瓷的迟滞特性能够用算子精确描述,并且逆迟滞算子存在,则输出位移d(t)与期望位移f(t)相等。此时,驱动电压与输出位移为线性关系。线性化后的电压-输出位移关系为f(t)=A+Bu(t),式中A,B为任意常数。
根据1.1节中迟滞位移测量得到的压电陶瓷输入电压与输出位移数据对确定该线性方程如式(6)、式(7)所示:
主环线性方程:
f1(t)=116.541u(t)+276.206
(6)
次环线性方程:
f2(t)=104.405u(t)+276.206
(7)
式中:f1(t)、f2(t)分别是主环、次环线性化后的位移值。
由于实验中对压电陶瓷迟滞补偿控制是慢速下的定位运动,所以直接利用1.3.2节中所建立的迟滞神经网络模型作为前馈控制器。控制器的输入为期望位移量f(t),f(t)经多项式模型输出拟合电压up(t),f(t)与up(t)同时作为BP神经网络的输入,神经网络运算得到驱动电压uh(t),施加于压电陶瓷。
实验采用C#编程实现。首先,引入线性方程将压电陶瓷的输入电压与位移线性化,得到线性化后的位移值f(t);f(t)经过前馈控制器计算后得到补偿电压uh(t),控制压电控制器输出电压驱动压电陶瓷产生位移d(t);同时,利用C#编写的采集程序每间隔0.5 s对每个施加电压下的压电陶瓷位移量采集一次,每个电压下可连续采集50次并显示。得到如图8所示的前馈开环控制程序图,图中曲线为压电陶瓷的位移-数据采集个数曲线。

图8 前馈开环控制程序图
对前馈开环控制实验得到的数据进行分析处理,并通过MATLAB绘制出如图9所示的前馈开环控制迟滞曲线。其中,实线为上升曲线,虚线为下降曲线。

图9 前馈开环控制迟滞曲线
在前馈开环控制情况下,压电陶瓷位移迟滞主环宽度由1 049.948 nm缩小到85.665 nm,迟滞减小91.84%;迟滞次环宽度由367.332 nm缩小到52.651 nm,迟滞减小85.67%。
2.2 前馈结合PID复合控制
在前馈开环控制的基础上,引入PID控制算法,可进一步减小跟踪误差,改善压电陶瓷迟滞非线性。如图10所示为前馈结合PID复合控制系统结构图。
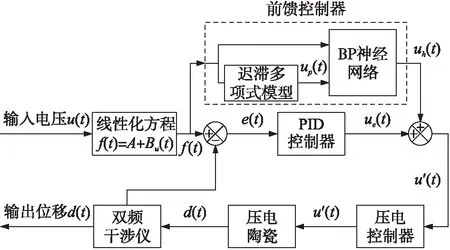
图10 前馈结合PID复合控制系统结构图
图10中,u(t)是系统的输入电压;d(t)是系统的位移输出值;线性方程f(t)=A+Bu(t)与前馈开环控制中的方程相同;e(t)是系统的输出误差值;ue(t)是PID控制器的输出电压;前馈控制器与前馈开环控制中的相同,uh(t)是经过前馈控制器计算后的补偿电压;最终施加到压电陶瓷的电压u′(t)=uh(t)+ue(t)。
实验采用C#编程实现了压电陶瓷的输入电压与位移线性化与PID控制算法;将线性化位移f(t)与系统输出位移d(t)比较,所得误差e(t)作为PID控制器输入,获得附加补偿电压ue(t),与前馈补偿电压uh(t)求和得到驱动电压u′(t),驱动压电陶瓷发生位移d(t);同时,利用C#编写的采集程序每间隔0.5 s对每个施加电压下的压电陶瓷位移量采集一次,每个电压下可连续采集50次并显示。
对前馈结合PID复合控制实验得到的数据进行分析处理,并通过MATLAB绘制出如图11所示的前馈结合PID复合控制迟滞曲线。其中,实线为上升曲线,虚线为下降曲线。在前馈结合PID复合控制情况下,压电陶瓷位移迟滞主环宽度由1 049.948 nm缩小到37.606 nm,迟滞减小96.42%;迟滞次环宽度由367.332 nm缩小到42.456 nm,迟滞减小88.44%。
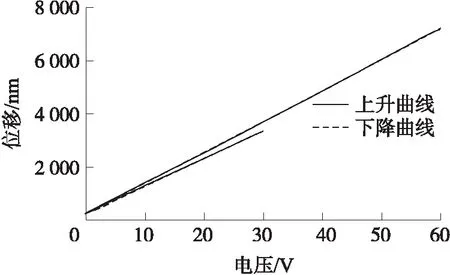
图11 前馈结合PID复合控制迟滞曲线
根据应用不同控制方法下的实验结果,得到如表1所示的压电陶瓷迟滞补偿控制结果。
在以上两种控制方法的基础上,给定期望输出位移量,分别经过前馈开环控制系统与前馈结合PID控制系统运行后得到输出位移量,进行数据处理并利用MATLAB绘制前馈开环与前馈结合PID控制输出位移对比曲线,如图12所示。
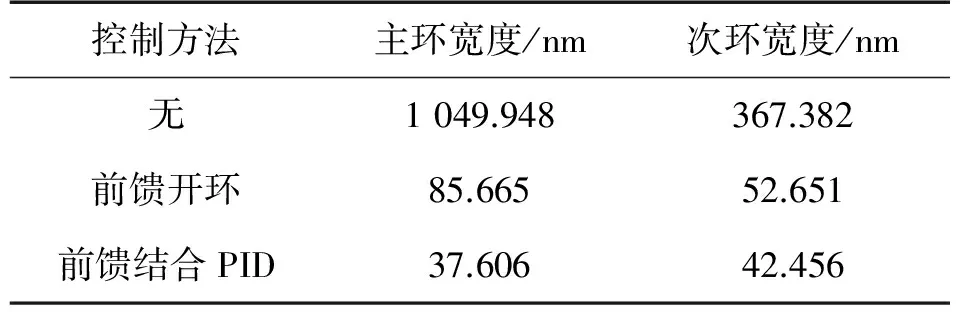
表1 压电陶瓷迟滞补偿控制结果

图12 前馈开环与前馈结合PID控制输出位移对比曲线
采用前馈开环控制方法,位移跟踪误差在333.357 nm以内,平均相对误差为2.97%;采用前馈结合PID控制方法,位移跟踪误差在306.903 nm以内,平均相对误差为2.04%。
2.3 步阶位移稳定性
为了验证所采用控制系统的适用性和稳定性,进行了步阶位移稳定性测试实验,给压电陶瓷施加间隔为10 V的0-60-0 V三角波形电压值,每隔60 s变化1 V,最终得到步阶位移控制前后曲线,如图13所示。

图13 步阶位移控制前后曲线

3 结论
为了抑制压电陶瓷的迟滞非线性,本文首先通过实验测量得到压电陶瓷的位移迟滞数据;引入线性方程实现压电陶瓷输入电压与输出位移关系的线性化,并建立基于多项式拟合算法的神经网络迟滞模型,简化了先建立压电陶瓷迟滞正模型再求其逆模型的步骤,且拟合精度较高。采用前馈开环控制,压电陶瓷位移主环迟滞减小了91.84%,位移次环迟滞减小了85.67%,位移跟踪的平均相对误差为2.97%。采用前馈结合PID控制,压电陶瓷位移主环迟滞减小了96.42%,位移次环迟滞减小了88.44%,位移跟踪的平均相对误差为2.04%。步阶位移稳定性测试实验,前馈闭环控制后起止点位移差值的不确定度为4.451 nm,说明了所采用的前馈闭环控制系统具有良好的稳定性。证明了该控制方法能有效地抑制压电陶瓷的迟滞非线性。
[1] 范伟,林瑜阳,李钟慎. 压电陶瓷驱动器的迟滞特性[J]. 光学精密工程2016(5):1112-1117.
[2] Klaus K,Pavel K. Compensation of Complex Hysteresis and Creep Effects in Piezoelectrically Actuated Systems—A New Preisach Modeling Approach[J]. IEEE Transactions on Automatic Control,2009,54(3):537-550.
[3] Tan U X,Win T L,Ang W T. Modeling Piezoelectric Actuator Hysteresis with Singularity Free Prandtl-Ishlinskii Model[J]. Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics,December 17-20,2006,Kunming,China:251-256.
[4] 王俐,饶长辉,饶学军. 压电陶瓷微动台的复合控制[J]. 光学精密工程,2012,20(6):1265-1271.
[5] Wei T A,Pradeep K K,Cameron N R. Feedforward Controller With Inverse Rate-Dependent Model for Piezoelectric Actuators in Trajectory-Tracking Applications[J]. IEEE/ASME Transactions on Mechatronics,2007,12(2):134-142.
[6] 王希花,郭书祥,叶秀芬,等. 压电陶瓷迟滞特性的建模及复合控制[J]. 电机与控制学报,2009,13(5):766-771.
[7] Wang Xihua,Guo Shuxiang. Modeling and Compensation of Piezoelectric Ceramic Hysteretic Behavior[J]. Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation,August 9-12,2009,Changchun,China:977-981.
[8] 徐运扬,徐康康,沈平. AFM压电陶瓷驱动器类Hammerstein建模与参数辨识[J]. 传感技术学报,2015(1):23-27.
[9] Tan Yonghong. Modeling Hysteresis Inverse in Piezoelectric Actuators Based on Inverse Hysteretic Operator[J]. Proceedings of the 2007 IEEE International Conference,2007:129-132.
[10] 谭永红,张新良,董瑞丽. 基于扩展输入空间的迟滞神经网络模型[J]. 上海师范大学学报,2009,38(3):229-236.
[11] 赵新龙,汪佳丽. 未知控制方向的迟滞非线性系统预设自适应控制[J]. 控制理论与应用,2015(5):682-688.
[12] 钱飞,许素安,刘亚睿,等. 基于多项式拟合的压电陶瓷迟滞神经网络建模[J]. 计算机仿真,2015,32(1):361-366.
[13] 梁宇恩,钱飞,许素安. 基于单神经元PID控制器的压电陶瓷控制方法[J]. 计算机测量与控制,2015,23(11):3657-3660.
[14] 钱飞. 外差干涉纳米定位系统中PZT的迟滞特性研究[D]. 浙江:中国计量大学,2015.
[15] 谭志波. 压电陶瓷驱动器迟滞补偿方法研究[D]. 黑龙江:哈尔滨工业大学,2008.
NeuralNetworkModelingandLinearCompensation
ControlforHysteresisofPZT*
XUSuan1*,JINWei1,LIANGYuen2,ZHANGFeng1
(1.College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou 310018,China;2.Zhejiang Institute of Mechanical and Electrical Engineering,Hangzhou 310053,China)
In order to suppressthe hysteresis nonlinearity of PZT,firstly the hysteresis data of PZT is obtained by experimental measurements. Through the analysis of experimental data,relationship between input voltage and output displacement of PZT is linearized by introducing the linear equation and hysteresis model of PZT is established by combining the polynomial fitting with neural network.A feedforward controller is designed according to the hysteresis model. Compensation and controlling for hysteresis of piezoelectric ceramic is experimented by feedforward open-loop method and feedforward combined with PID method. Experimental results demonstrate that the primary ring hysteresis of PZT displacement is reduced 91.84% and the minor ring hysteresis is reduced 85.67% andthe mean relative error of the displacement track is 2.97% with feedforward open-loop method,and the primary ring hysteresis of PZT is reduced 96.42% and the minor ring hysteresis is reduced 88.42% andthe mean relative error of the displacement track is 2.04% with feedforward combined with PID method. This indicates that the control method cansuppress the hysteresis nonlinearity of PZT effectively.
piezoelectric ceramics;hysteresis nonlinearity;neural network;feedforward;control
10.3969/j.issn.1004-1699.2017.12.017
项目来源:国家自然科学基金项目(51105348)
2017-05-24修改日期2017-08-11
TP273.3
A
1004-1699(2017)12-1884-06
许素安(1975-),女,博士,现为中国计量大学教授,主要研究方向是纳米计量,微纳米测量技术与仪器,xusuan@cjlu.edu.cn;
金玮(1994-),男,现为中国计量大学硕士研究生,主要研究方向为纳米定位控制系统;
梁宇恩(1970-),男,硕士,讲师,主要研究方向是计算机应用;
张锋(1989-),男,硕士研究生,主要研究方向是纳米定位系统。
