捣固车模拟仿真操作系统的开发与研究
2017-12-25宁广庆晋兵营
宁广庆,晋兵营
(郑州铁路职业技术学院,河南 郑州 451460)
捣固车模拟仿真操作系统的开发与研究
宁广庆,晋兵营
(郑州铁路职业技术学院,河南 郑州 451460)
捣固车是铁道线路维修的重要设备,集机械、电气、液压、气动、激光、计算机及自动控制技术于一体,具有生产效率高、结构复杂、价格昂贵等特点。采用模拟仿真技术开发捣固车培训系统可有效解决工学矛盾,降低培训费用。综合运用计算机、多媒体技术,模拟仿真DCL-32型捣固车驾驶、施工作业流程,开发出驾驶训练软件和仿真作业平台。运用虚拟环境营造训练情景,避免了捣固车学员操作练习过程中对设备和线路的损伤,达到了岗位技术培训标准,提高了教学水平。
捣固车;模拟仿真;操作系统;开发与研究
DCL-32型连续式抄平起拨道捣固车是铁路线路大修、维修的主力机型,其作为国外引进技术设备之一,集机械、电气、液压、气动、激光、计算机及自动控制技术于一体,具有生产效率高、结构复杂、价格昂贵等特点,对操作人员的专业技术要求很高。目前,对该设备操作人员和新上岗人员的培训及岗位技能鉴定都是采用封锁专用线或段管线在作业中进行的,存在较大的问题。一是成本高、安全风险大。DCL-32型捣固车每作业1个小时,仅柴油消耗就需近600元,据估算,将1名新操作人员培训成熟练工,仅燃油消耗和机械损耗人均就达1.8万元。另外,在专用线、段管线上作业培训无法完成正线的作业内容和项目的培训,需封锁正线边作业边培训,增加了对运输生产的干扰,新手在营运线作业,易造成晚点甚至会破坏既有设备。二是师资不足,DCL-32型捣固车有6个号位,需6位操作人员同时工作,每个号位的操作差异较大,现有的培训模式中师资不足的问题突出。三是培训周期长,因操作人员不足,导致施工作业和培训不能兼顾,工学矛盾突出。目前培训成熟一组(6位)操作人员需作业数百公里线路,培训时间至少2个月。随着捣固车装备数量的增多和工务职工队伍的扩大,提高大机作业人员综合素质和操作技术水平已成为发挥设备最佳效能的关键,而传统的集训方式难以满足当前的培训需求。开发研究DCL-32型捣固车模拟仿真操作系统已成当务之急。
1 系统总体设计
DCL-32型捣固车业务分别由驾驶运行和施工作业两部分构成。模拟仿真操作系统完全按照捣固车现场工作真实环境进行开发。其中,驾驶模拟系统分别由DCL-32型捣固车前司机室驾驶操作面板、GYK运行监控仪、制动机大小手闸、控制按钮和行车流程等软、硬件组成。作业模拟系统主要以该捣固车1号位作业操作面板、液压、电控元器件、控制系统操作按钮等配合作业流程进行软、硬件开发,实现作业操作流程的模拟仿真。捣固车模拟仿真操作系统总体设计为外形尺寸及结构布局与真车1 ∶1大小相同的模拟仿真操作平台,同时又可运用局域网络技术组成软件教学平台,既可单独操作练习,又可小组互联学习,完成作业模拟或驾驶运行模拟操作培训与考核。
2 系统架构
根据系统总体设计思路,捣固车作业模拟仿真操作台需要有硬件和应用软件两大部分组成。硬件是模拟操作台的基础,通过硬件(驾驶位、作业操作台、仪器仪表控制面板、计算机等)操作人员能够进行人机对话和系统操控;系统正确响应操作人员的交互信息需要软件的功能来完成。由于捣固车各功能系统的组成相对比较复杂,所需控制信息及硬件较多,系统应用软件应具备模块化、层次化、耦合度低、可移植性等特点。DCL-32型捣固车驾驶、作业模拟操作台应用软件系统分为数据层、服务层、业务支持层、应用展现层等4个层次,各层级按照不同的功能和需求又可以划分为多个子系统(如图1)。
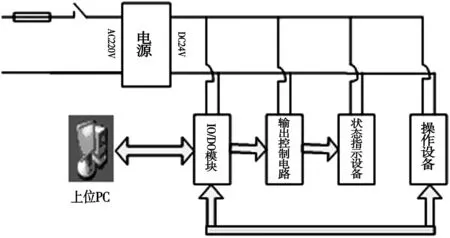
图1 模拟仿真操作系统架构
2.1 数据层
数据层主要由XML、逻辑数据模型、物理数据模型等组成。所有系统支持数据或历史记录数据最终进入数据层,并对实训操作台系统数据进行统一管理、统一存储。
2.2 服务层
服务层为操作台系统提供用户注册、登录验证、任务请求、成绩上传、接受教师机控制等服务,保存用户的各种状态和训练及考试成绩数据。
2.3 业务支持层
业务支持层分为作业操作系统、输出控制系统、作业控制系统、数据采集系统4个部分。
任务操作系统:对发送任务的判断和控制。
输出控制系统:对实训操作台系统内的指示灯输出的控制。
作业控制系统:通过操作台的输入情况对模拟作业操作过程进行控制。
数据采集系统:对操作台的输入输出信号量进行监控和数据分析。
2.4 应用展现层
应用展现层完成系统与用户的信息交互以及各种信息的展现,包括输入输出、内容呈现、功能呈现。
输入输出:包括仿真实际操作过程的输入设备和简单输出设备(显示灯、按钮等)。
内容呈现:系统对整车、场景和专家提示的呈现功能。
功能呈现:通过功能呈现,达到系统与用户的信息交互。
3 系统配置
3.1 硬件设备与环境
硬件设备由计算机、车体、模拟操作台、视景显示系统等组成。捣固车驾驶、作业模拟系统均采用与真车外形一致的驾驶舱、操作台和三维建模仿真控制软件。操作台仪表、按钮、控制键盘等与实物相同。
(1)计算机、服务器端/客户端:CPU,I5-2400(3.1 G,6 M);主板,Intel H61及以上;扩展槽,1个PCI-E*16,≥2个PCI-E*1;内存,4G DDRIII 1333;显卡,HD 64501G独立显卡。
(2)车体:由捣固车前驾驶室和1号作业位组成的模拟驾驶操作台车体。
(3)高流明三通道边缘融合投影技术、穹形幕布组成的视景显示系统。
(4)系统结构参数(如图2所示):系统电源,AC 220/380(±15%),50 Hz;系统额定总功率,600 W;控制计算机额定功率,400 W;操作台额定功率,200 W;操作台模块电压,DC 24 V及DC 5 V;操作台额定电流,10A(直流)。
图2 系统结构参数
3.2 软件系统特征
(1)基于局域网技术构建。基于局域网技术构建网络化仿真培训、考核系统,系统的所有功能模块通过局域网联成动态的、有机的整体,具备统一的登录、验证、管理机制,所有模块均处于终端显示器的监控与管理之下。
(2)系统控制逻辑仿真原理。系统采用建模技术、视景融合呈现技术、VR实现技术、数据库技术、机械电子技术、加密技术等多项新技术。
捣固车操纵台上的开关、按钮、控制器是整车控制系统的参数输入端,控制系统中所有电器以I/O接口或导线连接,用以控制系统内部之间的得电、失电关系。控制系统的工作受驾驶室开关和控制器的控制,并与控制系统内部各类电器的状态及它们的连接关系相关。
(3)操作流程模拟仿真。系统能够准确响应捣固车各项控制逻辑关系的操作,实时计算驾驶、作业流程中每个动作的相关条件。运动方式,动作过程,操作效果,液压、气动、电气、机械系统的结构、关联关系及动作时序均根据实际形式进行一对一的模拟仿真。操作信息能够根据实际情况实时更新并输出相关的模拟计算结果,完成操作过程动作仿真。
(4)驾驶、作业情景模拟仿真。按照DCL-32型捣固车实际作业工位分布设计操作平台,驾驶室、作业操作台上的各种操作手柄、显示设备、开关、发音、发光、报警系统按照实际情况进行控制和响应,所有的显示系统具有与真实系统相同的接口、菜单结构、按钮及功能。情景再现捣固车运行前方线路、站、车、信号及特殊天气变化,使虚拟操作环境与现场真实情景高度统一。
(5)软件运行要求。操作系统,window7 64位或windows Server2008 64位;数据库,SQLServer2008;运行环境,.net framework 4.0;Web服务,IIS6.0或以上版本。
系统所需的所有数据存储及数据的同步管理由服务器及软件对应开发,满足模拟仿真需要。
(6)系统安全设计。系统采用加密技术来保证数据的安全,分别采用配置文件加密、中间件加密和应用系统加密。配置文件加密是对配置文件内存储的关键数据(如流程、输入输出信号表等)进行加密处理后再存储于数据库内;中间件加密是对系统内所有调用的外部文件(如FLASH、视频、模型、配置文件等)进行加密;应用系统加密是对整个软件系统运行过程进行加密处理,采用加密狗的方式。
4 系统整合
通过三维建模、视景融合技术、VR实现技术、数据库技术等多项功能融合,将数据层、服务层、业务支持层、应用展现层整合为模拟仿真应用系统,以实现捣固车驾驶、作业操作仿真演练与考核功能。
(1)全三维化实现虚拟仿真车辆再现。网络模拟仿真操作软件运用三维数字化技术全部虚拟仿真车辆主体、司机室及内饰,电气设备,作业装置等。驾驶台上的GYK设备及其他显示设备,能够随着学员的演练,实时发生相对应的改变,显示内容、操作方式、内部逻辑与功能与实际车辆一致。
(2)作业仿真操作平台。作业仿真操作平台内的设备尺寸、外观、颜色、材质质感、功能与实际车辆一致,且与实际车辆上的对应设备具有相同的功能与控制逻辑。通过电、气路数字逻辑模拟实时、动态的数据接收,逻辑运算,控制输出,学员在虚拟条件下操控车辆上可操控的设备时,电气、仪表、显示、报警设备能够按照实际的逻辑关系触发或响应,响应的结果、现象与实际车辆一致。
(3)虚拟与仿真融合。系统采用全三维的虚拟仿真技术融合,再现捣固车驾驶、作业环境,并通过鼠标按照实际操作步骤进行操作流程演练。停车后,操作者可以在车辆内漫游,操作各种设备。
(4)教师端与学员端。系统设计单独操作的学员端和网络教学管理的教师端两种运用模式。系统能够通过教员控制台完成对系统的维护、用户管理、成绩评判、成绩管理、任务设置、故障设置、非正常行车设置、编制考核任务、通知学员考试、实时监控等功能。学员端能够接收教师端下达的任务,并对下达的任务进行练习、操作。
(5)网络化交互演练系统。配备快速以太网交换机,为系统提供网络通信,网络传输介质具备一定的抗干扰能力。多个子系统如制动系统、行车前整车检验、特殊天气运行设置及紧急情况处置等能逼真地进行控制逻辑及功能仿真。
模拟驾驶、模拟作业操作系统均能将操作者练习过程中的步骤即时记载,并在演练后反馈成绩。通过这两大系统满足学员对DCL-32型捣固车操作练习的培训需求。
5 结语
通过计算机模拟仿真进行铁路大型养路机械操作培训是一种安全、高效率、低成本替代真车实物培训的绝佳选择。DCL-32型捣固车模拟仿真操作系统良好地实现了驾驶运行、施工作业操作演练培训功能,开创了大型养路机械培训教学新模式。
[1]任杉,韩青.D09-32型捣固车结构、工作原理及电气控制系统分析[J].林业机械与木工设备,2009,37(9):41-43.
[2]霍立伟.大型养路机械D09-32型捣固车常见故障防治措施[J].中国机械,2014(9):140-140.
[3]傅文智,毛必显.抄平起拨道捣固车[M].北京:中国铁道出版社,2010.
[4]韩志青.捣固装置的振动分析[J].铁道建筑,2001(4):13-16.
TheDevelopmentandResearchofSimulationOperatingSystemforTampingWagon
NING Guangqing ,JIN Bingying
(Zhengzhou Railway Vocationnal and Technical College , Zhengzhou 451460, China)
Tamping wagon plays an important role for rail maintenance, it combines mechanical, electrical, hydraulic, pneumatic, laser, computer and automation, it is efficient but costly and has complex structure;With the simulation technology ,developing the tramping wagon training system can efficiently solve the contradiction between work and study, reduce the training costs. This project takes the advantages of computer and multimedia; simulates the procedures of driving and operation of DCL-32, which are realized by software. It helps us to avoid the damage to the railway during the training with the virtualization. The training results fulfill the requirement for manipulator and enhance the quality of teaching.
tamping wagon; simulation; operation system; development and research
2016 - 12- 10
河南省科学技术厅重点攻关项目(122102210257)
宁广庆(1960—),男,河南郑州人,郑州铁路职业技术学院副教授,研究方向为机械设备与维修。晋兵营(1972—),男,河南偃师人,郑州铁路职业技术学院副教授,博士研究生,研究方向为工程机械控制技术及运用。
TB24
B
1008-6811(2017)03-0010-04
赵 伟]