大型船舶锚泊综述∗
2017-12-25于汇源
于汇源 蔡 烽
(海军大连舰艇学院 大连 116013)
大型船舶锚泊综述∗
于汇源 蔡 烽
(海军大连舰艇学院 大连 116013)
随着人类探索海洋的步伐日益加快,船舶大型化也呈现出欣欣向荣的发展趋势,锚泊操纵更是成为了十分热门的话题。广袤无垠的海洋带来大量机遇的同时,也造成了很多悲惨的事故。其中由于锚泊操作不当而引起的海上事故[1~2]更是不胜枚举,使得人们对于大型船舶的锚泊操纵愈来愈关注。为了便于广大海员了解掌握锚泊操纵的相关内容以及当前研究热点问题,论文就大型船舶锚泊进行了研究综述。
大型船舶;锚泊操纵;综述
1 引言
通常情况下,船舶的状态主要分为在航、搁浅以及停靠泊三个状态,而锚泊也是停靠泊的一种方式。锚泊是一种船舶操纵中最为常用的操纵方式之一,因此有必要对大型船舶锚泊进行介绍,本文则分为五个部分对其进行介绍。
2 大型船舶的操纵特性综述
2.1 因为大型船舶质量大使得其惯性大,与一般船舶相比,有着不同的操纵特点
1)操纵反应迟缓,舵效较差。相对于普通船舶来说,大型船舶每单位所对应的主机功率较普通船舶相对较低,船舶在启动、制动以及自身操纵控制时会显得比较迟缓,其控制船舶的能力远逊于普通船舶。并且维持舵效的最低航速也相对较大,在直航中转向或避让时,施舵后不能快速见效,舵效损耗的也比较快。
2)旋回性能好。与瘦长的集装箱船比较,相对肥大粗短的大型船舶,尽管旋回圈较大,但其旋回直径与船长比(D/L)值较小,呈现出良好的旋回性能,但降速明显。
3)追随性、航向稳定性及保向性能差。与普通船舶相比,大型船舶的吃水一般不会同比增加,但船宽、船长和吃水增加明显,方型系数Cb大,对船舶的操纵性能影响较大。追随性、航向稳定性与旋回性具有相反的性质,在操纵超大型船舶时,要掌握好一定的提前量,转向、避让时,一定要谨记“早用舵,用大舵角;早回舵,用大压舵角”的原则[3]。
4)质量和附加质量大,冲量惯性大,停船性能较差、紧急停车性能差。船舶在水中运动时,推开其运动前方的水体,其运动后方的水体又将填补在此之前被该船所占据的空位,即在水体中推动船体的同时,必然也使其周围的水体受到推动。这意味着除需克服船体本身的运动惯性力外,还需克服由于水体同时也被加减速而产生的惯性力。因此,在停船、停车时要有提前量,早用车、用大车头。陆冬青[4]运用MMG模型,进行了倒车停船运动仿真实验,并与两艘实船实验结果进行了对比,较好地解决了船舶倒车横向力的计算问题。但是由于两艘实船的排水量较小,因此并不能作为大型船舶倒车停船实验的结论,需进行实验分析后,才能得出大型船舶倒车横向力的计算结论。
2.2 大型船舶在受限水域中的操纵特点
大型船舶在浅水、狭水道等受限水域中航行时的各种效应较普通船舶更为明显,主要表现在:
1)阻力增大,船速下降,主机负荷提高;
2)船体下沉和纵、横倾变化更为明显,要求有足够的富裕水深;
3)旋回性能变差,旋回中速度下降较深水中略小;
4)舵效下降,航向稳定性提高;
5)因航道宽度和水深的变小,船舶保向所需的压舵角明显增大;
6)因船速慢且船舶水线上下受风、流影响的面积大。
2.3 外界因素对大型船舶操纵的影响
2.3.1 风、流对大型船舶操纵的影响
船舶在不同的运动状态时,会受到不同方向风的作用,使得船艏、船艉与风作用力的相对位置关系发生变化,造成了船舶保向困难、偏转等现象。除此以外,还会产生一定的风致漂移速度,当船舶横向受风、船速近似为零时,可利用浅水中风致漂移速度的表达式进行大致计算,对于掌控船舶靠离泊位和锚泊操纵都是大有裨益的。刘敬贤[5]利用求锚泊静止外力极限公式和临界风速公式进行了估算;针对锚泊船因受强风走锚,冯树强[6]采用Hughes公式计算了风压力,绘制出了船舶在不同条件下所受的风力表,得出在风力的作用下船舶会发生偏荡现象,使得卧底锚链的长度减小,锚泊力下降;杨林家等[7]为了能定量估算风动力,结合汤忠谷等人的研究和回归计算,推倒出风动力计算公式。与经常使用的Hughes公式相比较,从三个角度计算,较为详细地估算了风动力;廖河树[8]提出了极限风速的概念,并采用实例对其进行了解释说明,得出了出链长度与极限风速之间的关系。但是由于其在建模分析的过程中,并未考虑浅水修正,因此得出的结果较实际还是存在着很大差距,需通过加入浅水修正进行分析,才能保证结果与实际情况相差不多。
船舶由于受到流的作用,会使得船舶被压向下方移动,特别是在低速航行时。在易产生不均匀水流的区域,水流会形成转船力矩,当流速差较大时,往往会对船舶操纵造成极大风险。与此同时,流也会影响船舶的施舵效果以及对地速度等。文献[6]绘制了在一定流速下三种不同吃水状态时船舶所受的流压力表,但公式中的水动力系数给出的较为模糊。
2.3.2 浅水效应对大型船舶操纵的影响
船舶在浅水水域时,随着水深与吃水之比的减小,其运动特性就会发生相应的改变,即出现浅水效应,产生的主要原因是水过浅或者船体吃水过深及船速过高引起的。它使船艏兴波形状发生变化、船体振动加剧、船速下降且加速困难,导致船舶舵力下降舵效变差、旋回性变差、船体下沉、船舶纵倾改变。浅水效应对大型船舶的影响,主要表现在:
1)当水深吃水比小于2.0时,船舶的旋回直径相比深水增加较快;
2)根据流体连续性原理流,由于船底空间压缩,使得船体周围的水流速度明显加快船舶的旋回直径相比深水增加较快,其相对流速、兴波阻力、摩擦阻力以及主机负荷显著增加,船速明显下降;
3)商船直航时一般艏下沉大于艉下沉,根据受限水域中船艏下沉量,对于低速、大型船舶来说,浅水航行船舶发生艏倾,易发生“刮底”,对于船舶的推进装置构成了极大的威胁;
4)船舶的横移变得困难,尤其被拖轮顶推、拖带时,表现得更加明显。
为了保证船舶的安全航行,在浅水航行时必须注意以下几点:
1)选择适当的航速
通过已经测得水深、吃水,可以采用傅汝德公式计算出最大的实际航速。若是港口当局给出了航行水域的规定速度,可以凭借计算出的傅汝德系数查出失速比,以及航速—轮转速对照表,从而确定船舶的实际轮转速度。最后,结合操船者的经验,选择更为合理的航速。
2)估计富余水深
一般情况下,富裕水深应保持如表1的数值。
3)防止向水深一侧偏转
浅水航行时,若是航道两侧之间水深差异较大呈一种斜面状,则船舶通过时可能出现向水深一侧偏转的状况。并且斜面的坡度越大,傅汝德系数越大,导致偏转越大。因此,为了克服这种现象,必须要向水浅一侧压舵。1934年,英海军的“纳尔逊”战列舰舰艉部搁浅就是因为航道水深的差异产生的偏转力矩造成的。
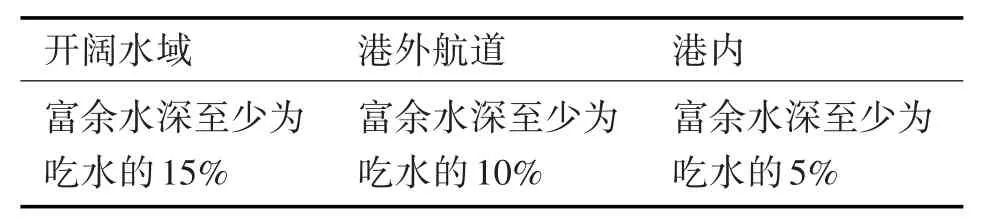
表1 不同水域富余水深保持值
2.3.3 岸吸、岸推和船吸、船推对大型船舶操纵的影响
大型船舶的体型和吨位所造成的吸力、推力大是与其制动力增加量不成比例的。为避免吸推现象产生,则需留有更宽的富余位置,特别是两大型船舶交会通过时,更需留有足够的距离。陈建锋等[9]通过岸吸力和船吸力估算公式以及回转力距估算公式,对岸壁效应和船吸作用进行了定性分析。但是没有量化的分析,难以体现出各个影响因素在整个作用过程中的主次,相应增加操船者采取正确措施的难度。
2.3.4 偏荡对大型船舶操纵的影响
大型船舶在大风浪中锚泊常常会产生严重的“偏荡”,这种“偏荡”是引发锚泊船舶走锚、碰撞、触礁、搁浅等事故的重要因素。黄国樑、藤野正隆[10]称偏荡为鱼尾状摆动,并采取模型试验和静态平衡的特征值分析了单点系泊的船体在风和流作用下的鱼尾状摆动特性;孙大铭等[11]为了研究偏荡运动,建立了运动方程,通过四阶龙格一库塔算法仿真,对锚链冲击力和锚链力进行对比,建立比较合理的船舶走锚预警系统;云会杰等[12]则重点介绍了偏荡运动的特性、危害以及抑制偏荡的主要方法,例如车舵法;张玉喜等[13]、汤健勇等[14]均采用分离建模的思想,前者仿真得出船舶影响偏荡运动各个因素变化趋势,得出单锚泊船舶在风流中保证安全锚泊的出链长度的计算公式,后者在利用MMG方程时,仿真了单、双锚泊的运动,分析了各个因素对于锚泊船的影响;龚少军[15]则指出锚泊船在受到风、流压力以外,还受到偏荡、波浪影响,因此分别讨论了影响船舶在大风浪中偏荡的四个方面,最后通过实例计算了多个因素下的安全出链长度。
3 大型船舶锚地选择
3.1 适当的水深
在无涌浪、遮蔽良好的锚地,锚位水深应该为本船吃水的1.2倍以上;对于有涌浪、开敝的锚地,选择锚位水深时最小水深应大于本船吃水的1.5倍加上2/3最大波高;在深水区选锚位时,锚位水深不要超过一舷链长的1/4,同时也要考虑到船舶的最大起锚能力。
3.2 良好的底质与海底地形
锚抓力来源于底土的抗剪切程度,如果底土在锚的剪切力作用下不发生断裂,锚体不发生翻转,则锚抓力可以达到无限大,或者说直到锚体发生变形为止。一般底土可以分为两类[16]:一类是粘性底质,如粘土底、沙底等。一类是松散的,如细砂底、粗砂底等。通过研究发现海底的底质抓力最好的是粘土,其次是泥沙,然后沙底较差,沙砾、贝壳等最差不适合船舶长时间锚泊。另外,海底的地形也会影响锚抓力,比如陡峭的地形,或者凹凸不平的地形,会对锚抓力产生不利影响。
3.3 符合水深要求的旋回半径
对于大型船舶来讲,其抛锚点与其他锚泊船之间应该保持符合要求的安全旋回余地,以避免造成与他船之间的紧迫危险局面。对于旋回半径的大小选取,顾慧生,林乐虎[17]按与浅滩、陆岸等固定障碍物的距离、与其他锚泊船、浮标等活动物的距离这两种情况给出了参考;苏永康[18]则在此基础上增加了双锚泊时的半径:船长+45m;林毅[19]确定锚泊船旋回余地则按照港区是否遮蔽、有无涌浪来确定。
3.4 安全出链长度
锚抓力一方面是由锚抓底底土对其作用力,另外一方面则是由于卧底锚链与底土之间产生的摩擦力。因此,足够的出链长度是必要的。文献[9]给出了经验公式:
文献[15]详细讨论了大风浪中偏荡中波浪等外界因素对出链长度的影响,并通过与锚抓力公式的计算,精确地得出安全出链长度;杨旺强[20]给出一般船舶锚泊分别在风速为20m/s和30m/s的经验估算公式:
阅读文献发现,关于锚地的适当水深、符合水深的旋回余地以及安全出链长度方面研究,多数给出的都是经验性建议。因此,有必要找出具体的理论方便计算适用于锚泊的水深。
4 大型船舶锚泊操纵的注意事项
4.1 做好进锚地前的准备工作
大型船舶进入锚地前的减速、淌航、试车、控制船等步骤,均须提前做好准备。其减速、淌航的时机,视锚地情况而定。锚泊船淌航试车后,要以缓速进入锚地。此时速度经试车后得到控制,可短暂地进车以提高舵效,有利于控制船舶进入到预定的锚泊位置。
4.2 掌握船艏方向
对于大型船舶来说,应该注意时刻掌握船艏方向,以便船舶可以实现精确抛锚。在正横或正横前受外力(偏顶)到达抛锚点的锚泊操纵中,若操纵水域受限或船舶空载,可以采用始终将船艏线或者矢量线对准抛锚点的方法进行锚泊[22]。当定点锚泊时,通过分析抛锚点与锚泊点的关系,以锚泊点相对抛锚点位置作为估算依据,做到“早、控、顶”[23];当船舶满载、顺水时要早降速,晚停车;空载、顶流时,可适当晚降速,早停车[24]。
4.3 确定锚泊操纵的余速
为了确保更好抓底,必须具备适当的后退速度,一方面有利于抛锚,另一方面可以避免因速度过大对锚机、锚链造成损坏。抛锚时,如果还是按照正常后退速度抛锚,一边松出链长,一边让锚去抓牢海底,这样就容易导致断链,从而还会造成锚刹车带的损坏危险。因此,必须要对船舶的余速进行判断。可以利用船舶的倒车水花、双向多普勒计程仪、雷达显示的SPD/GPS(船舶沿船艏方向的对地速度)和SOG(船舶对地速度)以及正横附近物标方位变化进行判断。文献[20]针对GPS、倒车水花及正横串视目标三种方法,提出了不足之处以及注意事项;董新[25]结合ARPA雷达上6min矢量显示来判断船舶的移动方向和速度以及附近物标的相对速度。阅读文献发现大型船舶抛锚时的余速基本都是给出一定范围的数值,没有相应的理论进行求解、量化分析。
4.4 确定锚泊操纵的抛锚方法
对于大型船舶尽可能采用退抛法,一般情况下不采用进抛法。采用退抛法船速比较容易掌握和控制,而进抛法船速的控制要比退抛法更困难一些,抛锚时对锚机刹车带磨耗也要大一些,也易刮蹭船体。阅读文献发现,多数文献对于锚泊操纵的抛锚方法介绍的十分详细。但是,对于深水锚泊水深的划分却不尽相同。一种是按照30m~60m、超过60m的水深进行划分,另外一种则是以25m水深为分界点进行划分。
5 大型船舶锚泊模型研究
一般计算锚泊力均采用公式:
式中:Pa为锚的系留力(N),Pc为锚链的系留力(N),Wa为锚在海水中的重量(kg),Wc为每米锚链在海水中的重量(kg/m),l为平卧海底的链长(m),λa为锚的抓力系数,λc为锚链摩擦阻力系数。
通过对锚泊力公式进行分析,锚泊力的强弱主要是由单位长度链重和卧底链长决定的,同时和锚链的摩擦阻力系数有关,而关于这方面的研究早已展开。文献[14]将船舶锚泊系统看作是三维空间下的运动,采用集中质量法来描述偏荡过程中锚链运动,而后通过运动耦合条件以及动力耦合条件将船—链藕合成为一个整体;刘勇等[26]胡晓芳、丁德勇[27]均根据悬链线理论进行研究,前者研究了悬链部分的链长与所受水平外力的关系,后者则以单个链环为微元对锚链所形成悬链线方程为基础,完成了不同链径锚链在抛锚长度等方面的综合分析;于洋,蒋治强[28]指出以二维悬链线理论、假定无流影响为条件的方法适用范围有限,因此推导出斜向流作用下的三维锚链线微分方程。模拟得出三维与二维悬链线主要差别在于侧向弯曲;韩璇[29]运用了因次分析法论证了锚索参数估算公式的构造形式,做了拟合精度分析。在此基础上,得到了表征均匀锚索和组合锚索的悬垂线特性的参数方程,并分析了全锚链锚索、全钢缆锚索和组合锚索的深水锚泊性能;国振等[30]建立以卧底锚链和悬链线分界处为原点的悬链线方程,分析组合锚索链的受力及方程的解法,结合实例计算组合锚索链的状态参数;杨鑫[31]将一根锚链划分为多段,同时应用切比雪夫拟合锚链的受力分析,简化了锚链力计算过程。在对静力悬链线理论推导时,得到了一个力与位置的方程组,指出力、位置与方程左右两边等式的关系;郑瑞杰[32]给出了锚链拖地与不拖地的计算公式,并通过无量纲计算比较了悬链曲线理论和抛物线理论之间的差异。系统地介绍了无、有荷重锚链及其计算方法,以此为基础提出了综合悬链法,将荷重锚链等效为一整条锚链,然后按照无荷重锚链公式进行计算。
关于锚泊模型研究,一方面,很多文献都简化了悬链线模型,将导缆口至海面的锚链直接简化为水下的锚链,但是由于其裸露在空气中受力不同,所以也就意味着并未对整条锚链进行研究。另外一个方面,多数文献研究锚链受力仅仅是假设受到一个力作用,所以应当探寻同时受到多种外力的情况。此外,较多的文献在研究锚链的受力过程中基本都忽略了锚链自身是可以发生弯曲的,因此将其看成一根不可拉伸的曲线进行计算,影响了计算精度。
6 大型船舶锚泊展望
针对当前研究存在的不足,本文提出了以下解决问题的途径:
1)利用分离型建模的思路,建立了锚泊船运动的数学模型和锚链的数学模型,考虑锚泊船同时受多个外力作用,并利用Matlab对锚泊船的偏荡运动进行仿真,得出船舶在偏荡以及走锚时的运动形态和各运动参数的变化趋势,从而研究锚泊船在风流作用下的偏荡运动。同时采用Matlab对单锚泊和双锚泊等锚泊方式进行仿真计算,分析各因素对偏荡运动的影响,得到规律性结论。
2)通过对现有的旋回直径公式进行分析,并利用实例对船舶所需的旋回半径进行估算,最后找出能较为准确求旋回直径的公式。
3)考虑到锚链质量不断变化,是变量系统。因此,运用密氏方程结合运动学原理或者采用瞬间冲力公式,对重力抛锚类自由落体阶段锚系统受力分析,求出重力抛锚类自由落体阶段在一定锚机刹车力下的出链长度和最大刹车力下的临界抛锚水深,以及锚下降速度大小与抛锚水深的关系,估算海水中锚链重力、破断力。
4)通过对大型船舶所受的锚泊力与外力大小比较,求出安全出链长度。随后与教材、文献中给出的出链长度公式进行比对,判断其计算效果。
5)利用运动学公式结合锚泊船的出链长度计算出锚泊船的抛锚时余速。或者采用锚泊船对锚链的作用力,算出锚泊船抛锚时的余速。
6)在建立悬链线方程时,将坐标原点建立在卧底锚链和悬链线的分界处,但是由于锚链受到外力作用,所以有可能部分卧底锚链被拉起。因此,针对此种情况应该分两种情形对其进行深入研究,从而形成对悬链线特性的完整分析。由于锚链各部分的受力不同,因此为更好研究锚链线受力情况,采用系数法将整条悬链线等效为两成分锚泊线,对传统悬链线方程作出改进,从而实现了对整条锚链的研究。
7 结语
随着船舶大型化,人们对海洋探索更加地频繁,但是由于部分操船人员自身经验不足、对船舶性能了解不足以及对海洋环境的认知度不高,导致经常发生锚泊安全事故。所以针对此现象,本论述从五个大方面对大型船舶深水锚泊进行了阐述,目的在于让操船人员对于大型船舶深水锚泊有一个更加清晰地认识,减少海上危险事故发生,为操船人员提供生命保障。希望通过此篇文章,能够加深操船人员对于大型船舶锚泊及其船舶自身性能的认知,提高大型船舶深水锚泊的精准性、可靠性与安全性。
[1]吴臻.由两起锚泊作业引发的一些思考,船舶安全管理论文集[M].哈尔滨:人民交通出社,2008:228-231.
[2]刘涛.浅谈船舶的走锚事故,中国航海科技优秀论文集[M].成都:人民交通出版社,2010,12:19-31.
[3]董新.超大型船舶的锚泊操纵[J].航海技术,2008,5(S1):22-23
[4]陆冬青.船舶倒车停船运动仿真研究[J].舰船科学技术,2007(4):110-113,116.
[5]刘敬贤.大型船舶安全锚泊优化方案[J].武汉船舶职业技术学院学报,2005(4):26-28.
[6]冯树强.锚泊船走锚原因与应对措施[J].天津航海,2015(4):5-7.
[7]杨林家,杨佐昌,于洋.船舶走锚预警系统[J].大连海事大学学报,2005(1):29-32.
[8]廖河树.安全锚泊的极限风速研究[J].集美航海学院学报,1996(4):10-14.
[9]陈建锋,郑睿.大型散货船舶操纵与管理注意事项[J].航海技术,2009(2):2-6.
[10]黄国樑,藤野正隆.关于风和潮流下单点系泊船体鱼尾状摆动的研究[J].海洋工程,1987,8:1-14.
[11]孙大铭,洪碧光,李强等.单锚泊船舶走锚预警系统的研究[J].航海技术,2010(5):2-4.
[12]云会杰,杨天华.论锚泊船舶的偏荡与防止[J].天津航海,2011(3):12-13.
[13]张玉喜,洪碧光,杨林家等.锚泊船在风流中的偏荡运动研究[J].大连海事大学学报,2009(4):25-29.
[14]汤健勇,王飞.水流中船舶单双锚泊偏荡运动响应研究[J].哈尔滨工程大学学报,2015(1):12-18.
[15]龚少军.大风浪中偏荡及波浪对出链长度影响的估算[J].南通航运职业技术学院报,2003(4):26-29.
[16]杨宝璋等.舰船操纵的理论与方法[D].大连:海军大连舰艇学院,1993.
[17]顾惠生,林乐虎.超大型散装船舶锚泊安全要点[C]//2007:232-236.
[18]苏永康.浅谈锚泊操纵安全[C]//船舶航泊实践研究论文集,2010:87-92.
[19]林毅.大型船舶锚泊操纵探讨[J].航海技术,1998(2):34,62.
[20]杨旺强.大型船舶抛、起锚中遇到的问题与应对措施的探讨[J].港口科技,2010(4):30-32,35.
[21]周发强.大型船舶进人抛锚点的儿种操纵方法[J].中国水运,2014,下半月:25-26.
[22]潘国华.北仑港大型船舶定点抛锚的操纵及锚泊点分析[J].航海技术,2013(2):15-18.
[23]魏东兵,李德鑫.超大型船舶抛起锚操作中的几个注意问题[J].航海技术,2012(6):12-14.
[24]赖永彪.抛锚操作与事故预防[J].航海技术,2010(2):27-28.
[25]董新.超大型船舶的锚泊操纵[J].航海技术,2008(S1):22-23.
[26]刘勇,徐海军,李振锚.锚泊船舶的安全警戒范围[J].航海技术,2015(5):31-33.
[27]胡晓芳,丁德勇.锚链直径对船舶锚泊能力的影响[J].中国舰船研究,2014(4):109-112+119.
[28]于洋,蒋治强.海流对深水锚泊船锚链静力特性的影响[J].中国航海,2013(1):101-104.
[29]韩璇.深水锚索锚泊性能研究[D].大连:大连海事大学,2008.
[30]国振,王立忠,李玲玲.新型深水系泊基础研究进展[J].岩土力学,2011(S2):469-477.
[31]杨鑫,锚泊系统的快速计算及其应用[D].大连:大连理工大学,2015.
[32]郑瑞杰.锚泊系统受力分析[D].大连:大连理工大学,2006.
Review of Large Ship Mooring
YU Huiyuan CAI Feng
(PLA Dalian Naval Academy,Dalian 116013)
Large ship anchoring manipulation is the very popular topic,which caused by anchoring improper operation of mari⁃time accidents[1~2]are too numerous to list,make people for large ships anchor control becomes more and more noted.In order to fa⁃cilitate the seafarers'understanding of anchorage control related content,and the current research hot topic,are reviewed in this pa⁃per,the large vessels are studied.
large ship,anchorage control,review
U675.922
10.3969/j.issn.1672-9730.2017.11.003
Class Number U675.922
2017年5月6日,
2017年6月26日
于汇源,男,硕士,研究方向:大型船舶抛锚。蔡烽,男,博士,副教授,研究方向:大型船舶抛锚。
