四轮定位仪主销倾角检定模型及可靠性分析
2017-12-22刘全攀贺敬良杨文武
刘全攀,贺敬良,杨文武,陈 勇
(1.北京信息科技大学机电工程学院,北京 100192; 2.北京电动车辆协同创新中心,北京 100192;3.北京市海淀区计量检测所,北京 100083)
四轮定位仪主销倾角检定模型及可靠性分析
刘全攀1,2,贺敬良1,2,杨文武3,陈 勇1,2
(1.北京信息科技大学机电工程学院,北京 100192; 2.北京电动车辆协同创新中心,北京 100192;3.北京市海淀区计量检测所,北京 100083)
针对目前汽车四轮定位仪检定装置在检定过程中无法准确检定主销倾角的问题,基于空间几何分析,建立了四轮定位仪主销倾角检定数学模型。通过对模型空间几何关系的分析推导,验证了检定主销倾角的原理,并研制了基于多自由度空间正切机构的新型全自动四轮定位仪主销倾角检定装置。该装置采用了球铰底座和杆端关节轴承,能够独立完成主销后倾和主销内倾的调整,从原理上消除了主销合成运动所造成的运动误差。考虑运动副间隙,对检定装置进行了运动可靠性分析研究,建立了检定机构的非连续接触可靠性分析模型,分析并推算出了考虑倾角输出偏差的检定机构倾角输出偏差的方差公式。对装置进行了主销后倾角和主销内倾角检测,结果符合国标要求的精度。该设计为后续的四轮定位仪检定装置的设计提供了一定的借鉴。
四轮定位仪; 检定装置; 主销倾角; 检定模型; 运动副间隙; 可靠性分析
0 引言
四轮定位参数的准确与否影响汽车行驶的安全性和操纵稳定性。当汽车行驶一定里程后,悬架等各个部位的零件会产生磨损、变形,从而改变汽车原有的定位参数[1]。为了恢复汽车原有的标准定位参数,必须对其定位参数进行检测[2-3]。目前普遍使用的汽车四轮定位仪是3D四轮定位仪。其工作原理是通过摄像机采集反光板上的图像信息,并经过图像处理计算出车轮的定位参数[4-7]。四轮定位仪测量值的准确与否关乎定位参数的调整效果,因此必须对四轮定位仪的测量精度进行检定[8-11]。
本文基于空间几何分析,提出了一种新型检定数学模型,并对其进行数学分析和推导。在该模型的基础上,研制了一种新型全自动四轮定位仪主销倾角检定装置。考虑运动副间隙,对检定装置进行了运动可靠性分析。
1 主销倾角检定数学模型
1.1 主销后倾角检定数学模型
以模拟主销与摆臂的交点为坐标原点,摆臂所在轴线为X轴,铅垂轴为Z轴,建立坐标系。主销后倾角检定数学模型如图1所示。

图1 主销后倾角检定数学模型
图1中:OA为模拟主销;OB为摆臂;α为主销后倾角;β为主销内倾角;λ为前束角;θ为外倾角。
为便于计算,在该数学模型中,假设摆臂及模拟主销为单位长度。模拟主销上端点为A(X1,Y1,Z1)。假设Z1=l,则A的坐标为:
A=(-ltanβ,-ltanα,l)
(1)
由于已经假定摆臂为单位长度,则B=(1,0,0)。当摆臂绕模拟主销转动时,摆臂的另一端将会转过一个圆弧。则此时摆臂轴另一端点C的坐标为:
C=(cosλcosθ,sinλcosθ,-sinθ)
(2)
由于摆臂与模拟主销间的夹角在转动过程中不变,所以有:
∠AOB=∠AOC
(3)
已知点A、B、C、D的坐标,则可得到:
sinθ=(1-cosλcosθ)tanβ-sinλcosθtanα
(4)
四轮定位仪主销后倾角的检定过程为:分别将摆臂转过λ1和λ2,可测得外倾角θ1和θ2。将λ1、λ2、θ1、θ2代入式(4),可得:
sinθ1=(1-cosλ1cosθ1)tanβ-sinλ1cosθ1tanα
(5)
sinθ2=(1-cosλ2cosθ2)tanβ-sinλ2cosθ2tanα
(6)
式(5)与式(6)相减并整理,可得:

(7)
在绕主销旋转的过程中,摆臂外倾的角度是很小的;而在建立模型过程中,规定摆臂绕主销转过的角度是相对于摆臂初始位置对称的,即λ1=λ2。因此,建立模型的通常步骤是先转过一个角度λ1并测量此时的外倾角θ1,然后反方向转过角度λ2并测量相应的外倾角θ2。由此可将式(7)简化为:
(8)
反光板也会跟着摆臂转动一定角度。四轮定位仪高分辨率的摄像机通过搜集反光板上的图像信息,可得到λ和θ。通过式(8)计算得到α,然后将其与已知的主销后倾角角度进行对比,即可完成对四轮定位仪主销后倾角的精准检定。
1.2 主销内倾角检定数学模型
主销内倾角检定装置数学模型如图2所示。

图2 主销内倾角检定数学模型
图2中:OD为摆臂纵向倾角的轴线;η为摆臂纵向倾角。
A的坐标由式(1)可知,B=(1,0,0),垂直于摆臂轴线的纵向倾角轴线的一端点D=(0,-1,0)。当摆臂绕主销转动时,摆臂的另一端将会转过一个圆弧,垂直摆臂的纵向倾角所在的轴线OD也会转过一个圆弧。则摆臂纵向倾角轴线另一端点E的坐标为:
E=(cosηsinλ,-cosηsinλ,-sinη)
(9)
由于摆臂与主销之间的夹角在转动过程中是不变的,所以摆臂纵向倾角轴线与主销之间的夹角也是不变的。同理可得:
sinη=(cosλcosη-1)tanα-sinλcosηtanβ
(10)
四轮定位仪主销内倾角的检定过程为:分别将摆臂转过λ1和λ2,以测得相应摆臂纵向倾角η1、η2。将λ1、λ2、η1、η2代入式(10)中,可得:
sinη1=(cosλ1,cosη1-1)tanα-sinλ1cosη1tanβ
(11)
sinη2=(cosλ2,cosη2-1)tanα-sinλ2cosη2tanβ
(12)
将式(11)与式(12)相减并整理,可得:

(13)
同理,建立主销内倾角数学模型的步骤是:先转过λ1并测量此时的摆臂纵向倾角η1,然后反方向转过λ2并测量相应的η2。由此可将式(13)简化为:
(14)
通过式(14)计算得到主销内倾角,然后将四轮定位仪测得的主销内倾角与已知的主销内倾角进行对比,以完成对四轮定位仪主销内倾角的检定。
1.3 四轮定位仪检定装置
在主销倾角检定数学模型的基础上,研发了一种基于多自由度空间正切机构的新型全自动四轮定位仪主销倾角检定装置。该装置由电动推杆、支撑架、主销、杆端关节轴承、弧线拉杆、摆臂、反光板夹套、定位块、球铰底座、步进电机、主销锁紧旋钮、摆臂连接块、锁紧旋钮、双轴倾角传感器和直线导轨组成。其中,直线导轨滑块和电动推杆通过支撑架相连接,电动推杆的一端与杆端关节轴承固定连接,杆端关节轴承与模拟主销滑动连接。传感器位于主销的正上方,与主销固定连接。主销下端是可用步进电机驱动的球铰底座。摆臂的一端通过其伸出部分的通孔与球铰底座两面的通孔销连接;另一端与反光板夹套插接,并通过锁紧旋钮固定。反光板夹套另一端通过锁紧旋钮将四轮定位仪反光板固定在检定装置上。摆臂连接块与摆臂固定套接。弧形拉杆一端与摆臂连接块固定连接;另一端有弧形槽孔,主销锁紧旋钮穿过槽孔与主销连接。定位块的下端放在台面上,上端与摆臂的下方顶接。
该装置的创新点在于:基于多自由度空间正切结构,通过杆端轴承和球铰底座,把直线导轨和电动推杆的直线运动转化成主销后倾与内倾的独立运动,消除了合成运动产生的干涉误差。采用高精度双轴倾角传感器,提高了测量精度,增加了数显功能,减轻了检定装置质量,使结构设计更加合理化。
2 检定机构运动可靠性分析
2.1 非连续接触模型
本文设计的球铰机械臂式四轮定位仪检定装置的机构运动速度较低,且受力较小,因此铰链式运动副中销轴和轴套套孔可能会处于非连续接触的状态[12-13]。非连续接触模型如图3所示。销轴在轴套套孔中随机运动,销轴中心也在误差圆范围内随机分布。误差圆半径由轴套套孔直径与销轴直径之差决定[14]。

图3 非连续接触模型
检定装置的有效联接模型如图4所示。将铰链式运动副连接放大,以P点为轴套套孔中心,理想状态下连杆OP长为r;以C点为销轴中心。由于运动副间隙的存在,P点和C点不重合,因此实际状态下连杆长度OC包括铰链运动副的径向间隙,被称为有效长度,设为R。求解机构运动误差时,需考虑运动副径向间隙,故采用有效长度R代替理想长度r。

图4 有效联接模型
由几何关系可得:

(15)
G为运动副的间隙,也是误差圆半径,其大小为:

(16)
由于C点在运动副间隙内运动,所以:
(17)
由于销轴中心C在误差圆内随机分布,因此xG、yG也具有随机性。假设其均为正态分布,则xG的标准差为:

(18)
根据式(18)可知G的均值和方差,分别为:

(19)
(20)
E(G2)代表了G2的均值,则:
(21)
根据方差的定义,运动副径向间隙的方差为:
(22)
综合式(21)和式(22),可得xG的方差为:
(23)
同理可得yG的方差为:
(24)
根据标准正态分布的对称性,可知:
E(xG)=E(yG)=0
(25)
2.2 检定机构的运动可靠性模型


图5 平面正切运动示意图

主销的倾斜偏差为:
式中:Δs、ΔH分别为有效长度S、H的公差。
主销的倾斜偏差均值为:

(26)
有效长度的表达式分别为:
S=(s+xG1)2+yG12
(27)
H=(h+xG2)2+yG22
(28)
其均值也应满足:
E2(S)=E2(s)+2E(s)E(xG1)+E2(xG1)+E2(yG1)
(29)
E2(H)=E2(h)+2E(h)E(xG2)+E2(xG2)+E2(yG2)
(30)
由于上文已知E(xG)=E(yG)=0,所以该机构中的有效尺寸和实际尺寸的均值相等。也就是说,在机构运动可靠性分析中引入运动副间隙,不会改变公差的均值,即E(Δs)=E(Δs)。则连杆倾角偏差的均值可表示为:

(31)
由此看出,以有效长度代替实际杆长后,对主销倾角偏差的均值没有影响。
在计算主销倾角偏差的方差时,为便于计算和表达,主销倾斜角度可表示为:
μ=μ(s,h,xG1,xG2,yG1,yG2)
(32)
则主销倾角偏差的方差可表示为:

(33)





根据已推算出的σxG、σyG与EG、σG之间的关系,综合可得主销倾角偏差的方差为:


(34)
现给出检定机构参数的具体数值:h=150 mm,s=a±0.5 mm,G1=(0.01±0.001)mm,G2=(0.01±0.001)mm。由此可得主销倾角偏差的方差方程,即可知该检定机构的可靠性。检定机构在各运动状态时,主销倾角偏差的方差如表1所示。
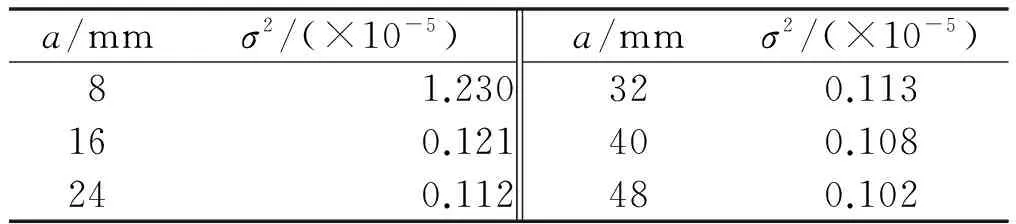
表1 主销倾角偏差的方差
将“有效长度”理论[15]应用到四轮定位仪检定装置的运动可靠性研究中,通过建立检定机构的运动副非连续接触的可靠性分析模型,分析推算出考虑运动副间隙的检定机构倾角输出偏差的方差公式。在分析四轮定位仪检定装置的倾角输出误差时,不仅考虑了构件基本尺寸的误差,而且考虑了运动副间隙带来的误差。
由表1可知,当运动副间隙很小时,四轮定位仪检定装置的运动精度可靠性可以得到保障;对于低速运动的检定装置,运动副间隙不会影响检定机构的倾角输出运动,因此可以忽略不计。
3 试验
根据设计要求,采用高精度数显水平仪,对所设计的四轮定位仪主销倾角检定装置进行主销倾角示值精度检测。分别将主销后倾和内倾0°、3°、6°、9°、12°、15°,然后将高精度数显水平仪放置在主销正上方测量主销的倾斜角,并进行5次重复性检测试验。主销后倾角示值相对误差、主销内倾角示值相对误差分别如表2、表3所示。

表2 主销后倾角示值相对误差

表3 主销内倾角示值相对误差
试验结果表明,可以通过杆端关节轴承和球铰底座把直线导轨和电动推杆的直线运动转化成主销后倾与内倾,倾斜角度可以通过双轴倾角传感器测得。从表2、表3可以看出,该检定装置的主销后倾角和主销内倾角示值精度满足国标要求。试验结果证明了该检定装置的可行性。
4 结束语
本文研制了基于多自由度空间正切机构的新型全自动四轮定位仪主销倾角检定装置。对四轮定位仪检定装置进行了考虑运动副间隙的运动可靠性分析,建立了检定机构的非连续接触可靠性分析模型,分析并推算出了考虑运动副间隙的检定机构倾角输出偏差的方差公式。代入数值计算可知:当运动副间隙很小时,四轮定位仪检定装置的运动精度可靠性可以得到保障;间隙对低速运动的检定装置的倾角输出运动影响不大,因此可以忽略不计。对该装置的主销内倾角和后倾角示值误差进行测试,试验结果满足国标精度要求,验证了该检定装置的可行性。
[1] 赵军,江东,段继伟.一种便携分体式四轮定位仪检定装置的研究[J].中国测试技术,2013,39(6):77-80.
[2] 张铁楠,涂亚庆,王德超.基于计算机视觉的汽车四轮定位技术研究[J].电子测量技术,2008,31(4):52-56.
[3] 沈峘,谭运生,金智林,等.考虑后轮主动转向的驾驶员模型研究[J].仪器仪表学报,2013,34(12):2736-2742.
[4] 赵前程,黄东兆,杨天龙,等.机器视觉3D四轮定位仪关键技术[J].仪器仪表学报,2013,34(10):2184-2190.
[5] RAKAY S,RAKAY S,WEISS R,et al.Adiusting wheel alignment on machinery equipment[J].Acta Montanistica Slovava,2012,17(4):348-353.
[6] 许张义,张桂香,周聪.线控转向中FlexRay总线的应用[J].电子测量与仪器学报,2013,27(3):258-263.
[7] BIAN X L,SONG B A,BECKER W.The optimization design of the McPherson strut and steering mechanism for automobiles[J].Forschungim Ingenieurwesen,2013,68(1):60-65.
[8] 徐观,苏建,陈熔,等.汽车主销后倾测量模型误差分析及标定方法[J].吉林大学学报(工学版),2008:38(1):17-20.
[9] 张利,卞晨,马学森,等.基于小波分析的汽车振动舒适性评价方法[J].电子测量与仪器学报,2014,28(4):352-359.
[10]高德赞.四轮定位仪检定装置及其检测原理的研究[D].长春:吉林大学,2012.
[11]张起勋,邵承会,张忠元,等.3D四轮定位仪校准装置关键检测技术研究[J].仪器仪表学报,2014,35(9):1979-1989.
[12]史天录.机构可靠性研究[D].西安:西北工业大学,1995.
[13]师忠秀,王锋.机构运动精度可靠性分析方法的研究[J].机械科学与技术,1997,16(1):115-121.
[14]黄玮,冯蕴雯,吕震宙,等.考虑铰链运动副间隙的机构运动可靠性分析模型[J].机械强度,2007,29(2):264-268.
[15]LEE S J,REDDY J N.The detemination of the probablilistic of velocities accelerations in kinematic chain with uncertaintly[J].Transmission and Automations in Design,1991,113(1):9-13.
VerificationModelandReliabilityAnalysisofKingpinInclinationAngleofFourWheelPositioner
LIU Quanpan1,2,HE Jingliang1,2,YANG Wenwu3,CHEN Yong1,2
(1.School of Mechanical and Electrical Engineering,Beijing Information Science & Technology University,Beijing 100192,China;2.Collaborative Innovation Center of Electric Vehicles in Beijing,Beijing 100192,China;3.Beijing Haidian Institute of Metrology,Beijing 100083,China)
At present, in verification process of the calibration device for automotive four wheel alignment, it is impossible to precisely detect the inclination of kingpin.Aiming at this situation, and based on spatial geometric analysis, the mathematical model of calibration is established. Through analysis and derivation of the spatial geometrical relationship of model, the calibration principle of inclination of kingpin is verified and a new automatic four wheel alignment inclination verification device is developed based on multiple-degree-of-freedom spatial tangent mechanism. In this device, the spherical hinge base and rod end bearing are used, thus the adjustments of caster angle and introversion angle can be accomplished independently, to theoretically eliminate the motion error caused by the kingpin resultant movement. The reliability analysis for the verification device is conducted in consideration of the clearance of kinematic pair, and the discontinuous contact reliability analysis model of the verification device is setup, the variance formula of the output deviation of the verification mechanism considering output deviation of the angle values is analyzed and calculated. The detection of caster angle and introversion angle are conducted by the device, and the results meet the precision requirements of the national standard.The design provides certain references for the design of the follow-up verification devices of four wheel alignment system.
Four wheel positioner; Calibration device; Kingpin inclination; Verification model; Kinematic clearance; Reliability analysis
修改稿收到日期:2017-06-27
刘全攀(1992—),男,在读硕士研究生,主要从事四轮定位仪检定方法与原理的研究,E-mail:582034855@qq.com;贺敬良(通信作者),男,博士,教授,主要从事车辆现代设计理论与方法的研究,E-mail:hejingliang@163.com
TH-39;TP27
A
10.16086/j.cnki.issn1000-0380.201712016
