弧焊机器人和变位机协调运动分析及模拟仿真
2017-12-19邵长春李水明
邵长春+李水明


【摘 要】本文建立弧焊机器人和变位机耦合性数学模型,在MATLAB仿真软件环境下,采用MATLAB神经网络对运动方程进行模拟仿真。
【关键词】弧焊机器人 变位机 耦合 MATLAB
【中图分类号】G 【文献标识码】A
【文章编号】0450-9889(2017)10C-0188-03
变位机与机器人间的协调工作,使得焊接过程存在的平、横、立、仰问题归结为平焊过程,文中提到的最佳待焊位置指的就是焊缝水平位置。为了提高焊接强度,降低焊接工艺的复杂程度,进而提高焊接的质量和效率,弧焊机器人和变位机要达到协调运动。因此建立相应的数学模型并对模型进行理论分析非常重要。
弧焊机器人变位机工作系统中各个功能模块可以建立相应的数学模型,但建立的数学模型要用到非常多的数学公式。通过人工计算不现实,也不能看出机器人变位机之间的相互影响关系。为了能够直观了解机器人变位机之间的耦合性能,对所建立的数学模型进行模拟仿真。
MATLAB软件是计算机技术以及数学理论发展的产物,功能强大,尤其在矩阵运算方面,因此得到广泛应用。本文利用MATLAB软件对所建立的数学模型进行模拟仿真,探索弧焊机器人变位机离线编程的方法。
一、理论基础
(一)弧焊机器人变位机运动学原理
矩阵运算可以表示某一点、一个向量、特定坐标系的平移运动、旋转运动。在实际的工程设备中,矩阵可表示一个物体或者其它的运动组件在坐标系运动。本文研究的就是用矩阵来表示弧焊机器人变位机的各个功能模块和各个组件的相对运动关系。
本文以IRB1400型号机器人作为研究的对象,该型号机器人模型有六个关节角度,具体如图1所示:
IRB1400型号机器人主要参数指标是:关节转角、连杆扭角、连杆长度、连杆距离和连杆的个数。这些参数决定了机器人的运动范围。具体参数如表1所示:
变位机工作原理就是拖动待焊工件,使焊缝不断移动到最佳待焊位置。变位机的主要参数:θα和θβ,代表两个关节角度。为了便于分析,在建立运动学数学模型时,往往选取变位机作为弧焊机器人系统的一部分,如图3所示:
依据D-H描述法,确定每一个杆件的参数和相互关系,在每一個连杆上设置一个坐标系,用矩阵变换原理来表达相邻连杆的参数和相互关系,包括焊枪和变位机待焊点之间的关系。
根据D-H描述法,在弧焊机器人各个关节的位置变换中,第N+1关节的局部坐标系相对前一坐标系N的位置姿态矩阵的表示如下:
二、对运动方程模型进行模拟仿真
(一)基于神经网络模拟仿真的建立
通过矩阵的变换运算,可以对弧焊机器人变位机系统运动进行正解和逆解运算并可以建立相应的数学模型。通过正解与逆解运算公式的程序求解,即可以把弧焊机器人变位机系统的运动进行量化。当正解与逆解运算的因果关系对应,则可以说明运动模型是正确的;反之,可以认为数学模型建立错误,相应的运动也会出现错误。本文是基于MATLAB神经网络对运动学模型进行模拟仿真。
弧焊机器人变位机系统在工作过程中会因为自身的的震动而使得焊枪发生抖动现象,会造成焊枪“蚁动”现象,实际焊接位置与理论焊缝有偏差。为此在计算过程中加反馈因数,对实际运动进行实时调整。
表2数据是弧焊机器人变位机系统在实际作业过程中选择的运动点数据:
MATLAB仿真软件通过对焊缝上这些特殊点的处理,在模拟仿真过程之前,MATLAB软件可以得到比较光滑的曲线焊缝。如图4,就是由已知特殊点生成的焊缝曲线。
利用上一节的运动数学模型公式,在MATLAB里输入相应的控制程序,焊缝曲线是可以根据特殊点生成。利用MATLAB神经网络,对模拟程序进行相应的训练,包括训练信息Training Info、训练参数Training。通过训练,即可以得到模拟仿真图形。
(二)仿真效果分析
通过对参数训练和对控制信息的训练,可以得到各个系统的运动情况。
分析误差范围,看是否在允许的范围之内。由图6可以看出运动时间是0到5秒之间,各个运动的线性速度的波动值的变化在0至1.2之间,完全可以达到精度要求。
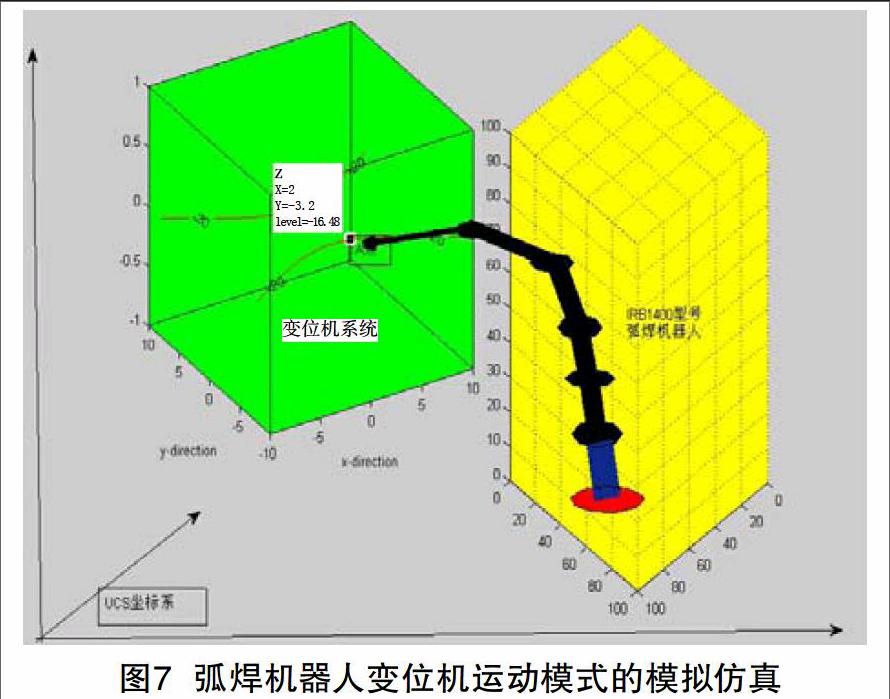
同时,在仿真过程中,可以利用神经网络系统生成作业示意图,如图7所示。
利用MATLAB对系统建立的数学模型进行仿真,容易验证弧焊机器人变位机系统末端运动轨迹正解矩阵的正确性。除去机械设备本身的因素造成的误差,如果正解模拟仿真运算与逆解仿真运算相吻合,就可以证明系统模型是正确的。反之,如果正解运算与逆解运算相差太大,则说明模型建立出现了错误。通过模拟仿真,可以及时发现问题,并能为实际的作业过程提供理论性的指导。
焊枪位置姿态与变位机位置姿态协调性运动的规划受很多因素的影响,比如工艺参数、工件形状和板厚等,其最终的姿态是难以进行精确量化的,所以必须依靠大量的经验知识积累。因此,将弧焊机器人与变位机的协调运动所得到的数学模型应用于实际生产中,在运算的复杂程度方面得到很大降低。当然,在生产应用中,还要借助其他很多的理论知识,比如基于焊缝特征的焊缝中心线信息获取方法,智能感应控制实现焊缝的识别等。
【参考文献】
[1]蔡自兴.机器人学[M].北京:清华大学出版社,2000
[2]林尚扬.中国从焊接大国向世界焊接强国迈进——我国焊接生产现状与发展中的几个问题[J].航空制造技术,2002(11)
[3]文巨峰,倪受东,颜景平.人工神经网络在机器人学中的应用探讨[J].制造自动化,2001(8)
【作者简介】邵长春(1985— ),硕士,柳州铁道职业技术学院讲师,研究方向:工业机器人技术及自动化控制。
(责编 丁 梦)endprint