随队支援干扰目标选择辅助决策方法
2017-12-19成晓鹏
齐 锋,成晓鹏,王 枭
(电子工程学院,合肥 230037)
随队支援干扰目标选择辅助决策方法
齐 锋,成晓鹏,王 枭
(电子工程学院,合肥 230037)
随队支援干扰是现代空袭作战中重要的电子对抗手段,随队飞行过程中对干扰目标的选择是随队支援干扰飞机作战运用研究的重点和难点问题,详细分析了随队支援干扰飞机的作战阶段划分及主要作战行动,针对雷达网的探测距离和综合发现概率指标,建立了随队支援干扰下的计算模型,并主要尽可能地降低雷达网的综合发现概率,提出了基于动态规划的干扰目标选择辅助决策模型。最后,以某种作战背景为基础,进行了作战过程仿真和辅助决策结果分析,验证了该方法的可行性和有效性,该方法求得的结论也支持随队支援干扰飞机其他方面的作战运用研究。
随队支援干扰,发现概率,动态规划,干扰目标选择
0 引言
在空袭反空袭作战中,作战双方为了获取信息、传递信息、利用信息控制,都大量地使用了雷达、通信、计算机、光电等电子装备。武器系统对电子设备的依赖,导致作战双方在电磁领域里展开了一场以“削弱敌方电子设备的功能,保护己方电子设备的功能”为目的的激烈的“电子对抗”。在航空兵突防作战中,电子对抗贯穿始终,夺取制电磁权成为夺取制空权的关键[1]。突防过程时,采用的电子对抗手段主要包括远距离支援干扰飞机、随队支援干扰和突击飞机的自卫干扰[2]。随队支援干扰由速度和机动性能都能够达到与突击飞机相当的作战飞机实施,通过挂载干扰吊舱,随同突防飞机编队一起进入敌方火力打击范围之内继续为己方部队实施电子支援干扰,当敌方雷达对突击编队方位进行探测时,干扰能够可以从雷达天线的主瓣进入,大大提高了干扰效果,为近距突防的实现提供了保证。
随队支援干扰飞机在随同编队遂行作战任务过程中,和编队中的飞机一样,面临敌方防空警戒雷达的探测发现,随着突防的深入,面临的威胁雷达也将愈来愈多。突防过程中,随队支援干扰飞机需依据实时的电子对抗侦察信息,实现快速识别、定位和威胁评估,进行准确的干扰时机和干扰目标选择,从而高效地执行对敌防空系统的压制任务,降低敌方雷达网对突击编队的探测效能,缩短敌方预警时间,从而掩护突击飞机的突防,完成作战任务。因此,进行随队支援干扰目标选择辅助决策方法研究,从而为现实的空中突防作战提供基础理论指导,具有重要的军事应用前景。
1 随队支援干扰的典型作战过程
随队支援干扰飞机在执行掩护突击编队任务时,通常与攻击机群混合编队飞行,同时突防和接近目标,由随队支援干扰系统实施干扰,掩护攻击机群的作战行动,以提高其在突防和攻击中的生存能力[3]。混合编队方式是指每个攻击编队配置1~2架干扰飞机,由干扰飞机施放积极干扰掩护后方的作战编队。通常情况下,随队支援干扰飞机的作战行动过程可分为6个阶段,即:开始伴飞阶段、侦察阶段、随队支援干扰阶段、区外干扰阶段、掩护返航阶段和返航阶段,如图1所示。
1.1 开始伴飞阶段
开始伴飞阶段是指开始执行作战任务时,干扰飞机在前,作战飞机在后,混合编队沿着相同的航线朝目标飞行。这个过程中随队支援干扰飞机在混合编队内与其他突防飞机一起飞行,且不施放干扰。
1.2 侦察阶段
侦察阶段是指干扰飞机在飞行一段时间后,对敌方雷达目标进行侦察定位,确定敌方雷达的部署位置、工作参数和工作样式等信息,为下一阶段实施干扰分配做准备。这一阶段随队支援干扰飞机在飞行编队内执行侦察定位任务。
1.3 随队支援干扰阶段
随队支援干扰阶段是指在完成对敌方雷达的目标侦察任务后,随队支援干扰飞机在飞行编队内实施干扰任务,为己方突防编队提供支援干扰。这一阶段随队支援干扰飞机在飞行编队内执行干扰任务。
1.4 区外干扰阶段
区外干扰阶段是指在进入敌方的火力杀伤范围之后,为了继续进行有效的电子干扰,同时保证干扰飞机的生存率,干扰飞机在预定的干扰阵位内执行区外干扰任务。预定干扰阵位的设置必须保证随队支援干扰飞机在该区域内能够对敌方雷达目标实施压制干扰。此时,干扰机位于目标附近,通过辐射强干扰信号掩护目标,一般采用遮盖性干扰方式[4]。这一阶段干扰飞机与突防飞机编队分离,进抵预设的干扰阵位,执行区外干扰任务。
1.5 掩护返航阶段
掩护返航阶段是指为了保证己方的突防飞机编队在完成任务后能够顺利返航,干扰飞机需要继续在敌方火力控制范围之内继续实施积极干扰。
1.6 返航阶段
返航阶段是指在所有的突防飞机已经安全退出敌方火力杀伤范围之后,随队支援干扰飞机也退出战斗过程,与突防编队合批、一起返航。
根据随队支援干扰飞机的作战过程,随队支援干扰飞机的信息截获、处理及决策过程如图2所示。
2 随队支援干扰效能指标计算
随队支援干扰的作战目标是敌方的防空警戒雷达,雷达是利用目标对电磁波的反射现象来发现目标并测定其位置的,其最基本的功能是发现目标和测量目标的坐标。而雷达对抗的目的,则是要破坏或降低雷达的这两种功能。随队支援干扰的根本目的是压缩敌方雷达的探测距离,进而降低雷达对随队支援干扰飞机掩护编队的发现概率。
如图2所示,在进行雷达干扰目标选择决策时,需要分别计算无干扰和有干扰下单部雷达探测距离、发现概率及雷达网的综合发现概率等指标。
针对随队支援干扰下的雷达探测距离,在多个文献中已经阐述[4-6],本文重点说明雷达发现概率的计算方法,并将其作为干扰目标选择决策时核心指标。即要求在干扰条件下,尽可能地降低雷达网对目标的综合发现概率。
假设N部雷达组网时,认为信息能够完全共享,则对目标的综合发现概率为:
式(1)中Pdi为第i部雷达对目标的发现概率。
下面讨论Pdi的计算方法。
2.1 目标与雷达的接触概率
假设雷达的扫描角度范围为θs(圆周扫描时,θs=360),则雷达完成一次扫描需要的时间为:
式(2)中:θα为对空警戒雷达水平波瓣宽度(度),Ω为对空警戒雷达天线扫描角速度(度/秒)。
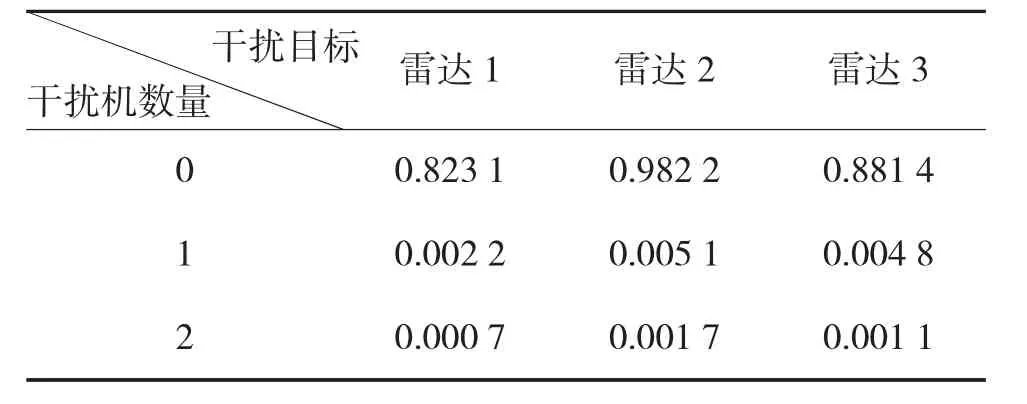
假设目标处于雷达探测区域的时间为tin,若tin 若tin>ts,则目标一定会与雷达发生接触,在时间tin内与雷达的接触次数为: 无干扰下,当目标到雷达的距离为R时,设定虚警概率PF=10-6,当脉冲积累数n较大时,常规雷达对目标的平均发现概率近似计算公式为[8]: 其中n计算方法为: 其中 fr为雷达脉冲重复频率(Hz),SN(R)为雷达接收到的单个脉冲的信噪比,其计算方法为: 式(7)中:Pt为雷达发射功率(单位:W),Gt为雷达发射天线增益(倍),为雷达工作波长(m),Kb为波尔兹曼常数,取1.38×10-23J/K,T0为以绝对温度表示的雷达接收机噪声温度,取T0=290°K时,KbT0=4×10-21W/Hz,Δfr为雷达接收机带宽(Hz),Fn为噪声系数(倍),Lr为系统损耗因子(倍),Rt为为目标到雷达的距离(m),μ为新体制雷达的改善因子(倍)。 随队支援干扰条件下警戒雷达对目标的发现概率式(2)仍然适用,只不过此时公式中的雷达接收到的单个脉冲的信噪比SN变为信干比SJ,其计算方法为: 其中,Pj为雷达干扰机发射功率(W),Gj为干扰机发射天线增益(倍),γj为干扰信号对对空警戒雷达天线的极化损失,一般取γj=0.5,Δfj为干扰信号带宽,Lj为雷达干扰机的综合损耗因子(倍);其他符合含义同上。 综上所述,一部雷达在随队支援干扰下综合发现概率是目标到雷达的距离和目标在雷达探测区域之内时间的函数,即: 假设经过随队支援干扰设备侦察与目标定位获得了目标的用频、信号参数和位置信息等信息,通过目标特征知识库进行识别后,获得雷达目标N个,设随队支援干扰吊舱具有同时干扰M个目标的多目标干扰能力,干扰多个目标时,认为均分其有效干扰功率,在问题描述中可认为有M部干扰功率相同的干扰机,其总干扰功率为干扰吊舱的功率。以干扰后雷达(网)的综合发现概率下降程度最为效益指标,可建立目标选择的动态规划模型。 将问题按对雷达目标的选择分为n个阶段,阶段变量 k=1,2,…,n。 状态变量sk:表示进行第k个雷达目标选择时,可用的干扰机数量; 决策变量xk:表示用于干扰第k个目标的干扰机数量; 状态转移方程:sk+1=sk-xk 阶段指标vk(sk,xk):表示第k阶段用xk台干扰机干扰第k部雷达时,第k部雷达对目标的发现概率。 最优值函数fk(sk):表示第k阶段初干扰机数为sk时,从第k至第n个雷达综合发现概率,得到动态规划的基本递推方程为: 在上述动态规划模型中,因为干扰机数量M和雷达目标数量N都是离散值,因此,可以采用离散变量的分段穷举法进行动态规划的求解[9]。 假定蓝方的防空雷达网由3部雷达组成,红方的突击编队由一架歼击轰炸机和一架电子干扰飞机组成,如图2所示。其中蓝方的雷达1~雷达3的功率依次递增,分别部署在蓝方阵地的北部、中部和南部;红方突击编队以蓝方雷达1为打击目标,以1 000 km/h的速度向目标机动。红方的电子干扰飞机具有同时干扰两个目标的能力,在突击过程遂行随队支援干扰任务。图3中(a)~(d)是几个典型时刻的空袭作战过程仿真图(仿真步长取5 s)。 1)图3(a)是仿真时间推进到700 s时的态势图,红方电子干扰飞机还处于侦察阶段,由于雷达对抗侦察相对于雷达探测在距离上具有优势,电子干扰飞机优先发现雷达信号,通过目标的识别判断,对其发现概率超过0.1的区域进行辅助计算和绘制,判断出突击编队距离雷达的探测区域尚早,无需实施干扰。 2)图3(b)是仿真时间推进到855 s时的态势图,红方突击编队即将进入蓝方雷达探测区,尤其是蓝方雷达2对红方突击编队的发现概率超过0.1,具备了形成空情的可能性,电子干扰飞机以全部功率对雷达2实施干扰。 3)图3(c)是仿真时间推进到1 090 s时的态势图,蓝方雷达1对红方突击编队的发现概率也超过0.1,此时需要综合考虑对前期的干扰目标雷达1和现在新出现的威胁目标雷达2的目标选择问题,按照上述动态规划方法进行决策,电子干扰飞机同时对雷达1和雷达2实施干扰。 4)图3(d)是仿真时间推进到在1 310 s时的态势图,蓝方雷达3对红方突击编队的发现概率也超过0.1,此时干扰目标选择需要综合考虑蓝方3部雷达,同样,按照上述动态规划方法进行决策,电子干扰飞机选择雷达2和雷达3进行干扰。 下面以1 310 s时的作战场景为例,说明利用动态规划进行决策的计算过程。此时根据电子干扰飞机上侦察到的雷达信号,进行分析识别和作战效能预测时,3部雷达的发现概率均超过了0.1,需要综合考虑目标选择问题。该时刻,在不同干扰情况下各雷达对突击编队的发现概率如表1所示: 表1 不同干扰情况下各雷达对突击编队的发现概率 根据边界条件f4(0)=0,利用逆序解法,可求得: 即计算得出最优的干扰策略是同时干扰雷达2和雷达3,此时的综合发现概率为0.828 4。 随队支援干扰飞机的目标选择是研究随队支援干扰飞机作战运用的一项重要内容,本文研究了随队支援干扰飞机的作战过程,提出了在随队突防过程中的关键时节,基于动态规划模型,实时选择干扰目标的方法,能够尽可能地降低突击编队被发现的概率,实现了在给定兵力下的优化运用。同时根据该方法的求解结论也可以进一步进行其他方面的作战运用研究,如干扰兵力的需求问题,在上述实例中,可以看到,在1 310 s时,即便使用优化的目标选择方法,编队被发现的概率还是高达0.828 4,显然若是在1 310 s前不能完成突击任务,就要考虑增加干扰兵力的问题。 [1]曹志耀.计算机作战模拟系统设计原理[M].北京:解放军出版社,1999. [2]蔡亚梅,赵霜.美国几种先进机载自卫干扰系统的发展分析[J].中国航空武器试验训练靶场,2009,21(4):53-60. [3]陈晓榕,李彦志.随队支援干扰飞机发展历程及作战运用[J].四川兵工学报,2013,34(11):62-65. [4]邵国培,何俊.电子对抗战术计算方法[M].北京:解放军出版社,2010. [5]封志方,刘璘.随队支援干扰情况下雷达压制距离的仿真[J].四川兵工学报,2010,31(9):32-34. [6]陈伟华,张永顺.随队支援干扰环境下雷达暴露区算法[J].弹箭与制导学报,2004,24(2):383-385. [7]贲续进,齐锋,王新宇,等.随队支援干扰条件下编队突防航线规划研究[J].电子工程学院学报,2011,30(4):55-58. [8]邵国培.电子对抗作战效能分析原理[M].北京:军事科学出版社,2013. [9]胡运权.运筹学教程[M].3版.北京:清华大学出版社,2007. Research on Target Selection Method of Jamming with Team Basing on Dynamic Programming QI Feng,CHENG Xiao-peng,WANG Xiao Jamming with the team is an important electronic countermeasure in modern air strike,as well as the target selection is the key and difficult point of the operation research about jamming with the team.The operation process and phases of jamming with the team are analysed in detail.Taking the detecting distance of the radar net and comprehensive detecting probability into consideration,with aiming at reducing the comprehensive detecting probability of the whole radar net,a target selection method based on dynamic programming in the operation process ofjamming with the team is advanced.Finally,based on a simple scenario,the simulation of the operation process and the analysis about the decision result is finished in this paper,which demonstrates the feasibility and availability of the method.The further application of the research is discussed at last. escort-support jamming,detection probability,dynamic programming,target selection of jamming TN972;TJ85 A 10.3969/j.issn.1002-0640.2017.11.13 1002-0640(2017)11-0056-04 2016-09-11 2016-11-07 齐 锋(1974- ),男,河北唐山人,副教授。研究方向:作战仿真。2.2 无干扰时接触条件下雷达对目标的发现概率
2.3 雷达对目标的发现概率
2.4 单部雷达对目标的综合发现概率
3 随队支援干扰目标选择模型
4 干扰目标选择辅助决策仿真分析
4.1 仿真过程
4.2 辅助决策分析
5 结论
(Electronic Engineering Institute,Hefei 230037,China)
