耕深均匀性的拖拉机电控液压悬挂系统
2017-12-16谢志勇
宋 玲,谢志勇
(1.怀化职业技术学院 机械系,湖南 怀化 418000;2.娄底职业技术学院 机电工程系,湖南 娄底 417000)
耕深均匀性的拖拉机电控液压悬挂系统
宋 玲1,谢志勇2
(1.怀化职业技术学院 机械系,湖南 怀化 418000;2.娄底职业技术学院 机电工程系,湖南 娄底 417000)
耕深均匀性是拖拉机作业过程中一个重要的衡量指标,为此提出了一种耕深均匀性的拖拉机电子液压悬挂系统的控制方法。首先介绍了该系统的结构组成及耕深控制原理,然后建立了系统的物理模型,并分析了耕深值和提升臂转角存在的关系,以便利用提升臂转角来间接测量实际的耕深值。以设定的耕深值为输入,实际耕深值为负反馈,采用PID控制算法对该系统的耕深控制过程进行了仿真分析,实现了在线校正实际耕深与设定值的偏差。最后,通过田间试验分别验证了156mm耕深值和200mm耕深值的控制过程,证明了该控制方法的可行性。结果表明:提出的控制方法能够保证耕作过程中耕深的均匀性,也大大降低了驾驶员的操作强度。
拖拉机;电液悬挂系统;耕深均匀性;PID控制
0 引言
拖拉机在田间牵引农具作业时,其耕深的均匀性是衡量拖拉机作业水平高低的一个重要指标[1-2],特别是现代农业对作物的耕深均匀性要求愈来愈高。传统的拖拉机液压悬挂系统具备位置调节功能,能使得农具与拖拉机相对位置不变[3]。其机械控制装置的原理是:当外提升臂的转角发生变化时,提升臂就会通过相应的机构推动控制阀的主阀芯,使其偏离中位,液压油进入油缸推动活塞带动提升臂转动直至原有位置;但由于机械杆件和弹簧存在迟滞及摩擦因素会导致该类机械系统存在控制精度低和响应慢的缺陷[4-5]。所谓位置控制,就是要保证作业的耕深均匀控制策略,这对浅耕作业是极其重要的,现代拖拉机悬挂系统采用电子控制方法实现田间作业的多种目标控制。从控制的角度来看,位置控制是一个典型的闭环控制,将实际耕深作为负反馈,输入值是目标耕深,输出是控制阀的电压信号,控制阀调节油缸来带动农具升降。由于实时测量耕深值比较困难,通常做法是采集外提升臂转角信号,再经过比例换算得出耕深值。针对位置控制方法,谢斌等[6]提出了利用倾角传感器农具耕深的方法,根据悬挂机构几何关系出倾角传感器值和实际耕深。朱思洪等[7]采用PID控制策略并利用MatLab仿真分析了该系统。李明生等[8]设计了模糊PID自适应控制器,进行了位置控制和牵引力控制分析,并搭建了试验平台。鲁植雄等[9]设计了耕深模糊控制器,进行了力位综合控制研究,最后实现了双参数控制;但这些控制方法过于复杂,并不适合真实的作业过程控制。为此,提出了一种基于外提升臂转角的耕深控制方法,用提升臂转角间接测量实际耕深值,并以此构建电控液压悬挂系统,实现了耕深的自动控制。最后,通过仿真实验和田间实验验证了该控制策略能够保证耕深的均匀性,且具有较高的测量精度和较快的响应时间,证明了系统的可行性。
1 电液悬挂系统结构及控制方法
1.1 系统结构及原理
拖拉机电子液压悬挂系统一般由液压泵、换向阀、油缸、电子控制单元、传感器、悬挂机构、显示器和控制面板构成[10],如图1所示。
具备多种控制方法的电控系统通常有位置控制、阻力控制、滑转率控制及3种参数的综合控制。因此,传感器涉及到转角传感器、拉压力传感器、转速传感器和低速雷达等。传感器的安装位置如图1所示。液压泵由发动机带动运转,油缸为单向缸,农具下降时可以利用自重。比例换向阀为三位三通阀。
当拖拉机在田间作业时,驾驶员根据作业要求在控制面板上设置耕深值,系统开始执行位置控制策略。当出现地面不平整或油路泄漏等原因导致当前耕深与设置耕深不相当时,系统会计算出差值,根据PID算法输出信号给比例阀,由比例阀控制油缸的升降,保证耕深的均匀性。
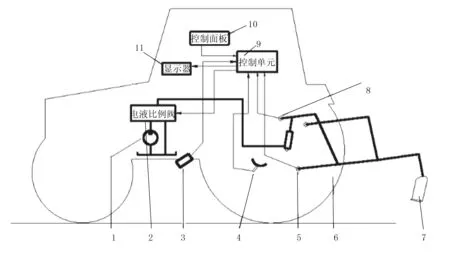
1.液压泵 2.比例换向阀 3.低速雷达 4.轮速传感器 5.拉力传感器 6.悬挂机构 7.农具 8.位置传感器 9.控制单元 10.控制面板 11.显示器
1.2 耕深控制方法
位置控制实际上为一个闭环反馈控制[11],如图2所示。

图2 位置控制框图
驾驶员在控制面板上设置的耕深值为输入参考量,传感器间接测得的耕深值为实际量,输入参考量与实际量的差值作为PID控制的输入,从而使得偏差尽可能地接近零;PID算法计算出一个输出值给比例阀,比例阀通过阀芯的移动以便切换油路的通断。若偏差为正,则实现油缸的下降,农具下放至设置的耕深值;若偏差为负,则说明耕深超过了设置值,此时油缸上升,农具上提,在拖拉机作业过程中,驾驶员只需要根据作业要求设置好耕深,无需繁琐操作。采用PID算法实现位置自动控制,简单有效,并且能够保证较高的精度。
2 系统建模及仿真分析
农具的升降通过悬挂机构实现,角度传感器的安装在提升臂铰链处,用于测量提升臂的转角。实际耕深值是通过和换算而来,因此提升臂的转角与耕深值的关系必须事先明确。
2.1 系统建模
拖拉机电控液压悬挂系统的建模有数学建模和物理建模两种方法。这里用Simulation X软件进行了系统的物理建模。系统分为悬挂机构、液压系统和控制信号部分[12]。悬挂机构采用的是三点悬挂,该机构沿拖拉机行走方向的中心线左右对称,所以做理论分析时通常简化为一个平面六连杆机构,如图3所示。

图3 悬挂机构平面示意图
机构主要由外提升臂AD、上拉杆CG、下拉杆BF、提升臂DE、内提升臂AJ等组成。其中,将转角传感器安置在外提升臂转角与机体的铰接点A处,用于测量外提升臂相对初始位置的转角值,并计算出与农具垂直方向的位移差值,即实际农具耕深关系。通常中大型拖拉机由主副两个油缸共同控制农具升降,因此建模时也采用了两个油缸。
液压系统构成如图4所示。液压泵由发动机带动,通常根据设计要求选用相应型号的定量齿轮泵;液压系统都有一个额定压力;安全阀用于保护系统过载;换向阀是用来控制液压缸的行程和速度。电控液压悬挂系统采用的均是电液比例换向阀,由电信号控制换向阀的阀芯行程,实现流量的比例控制。
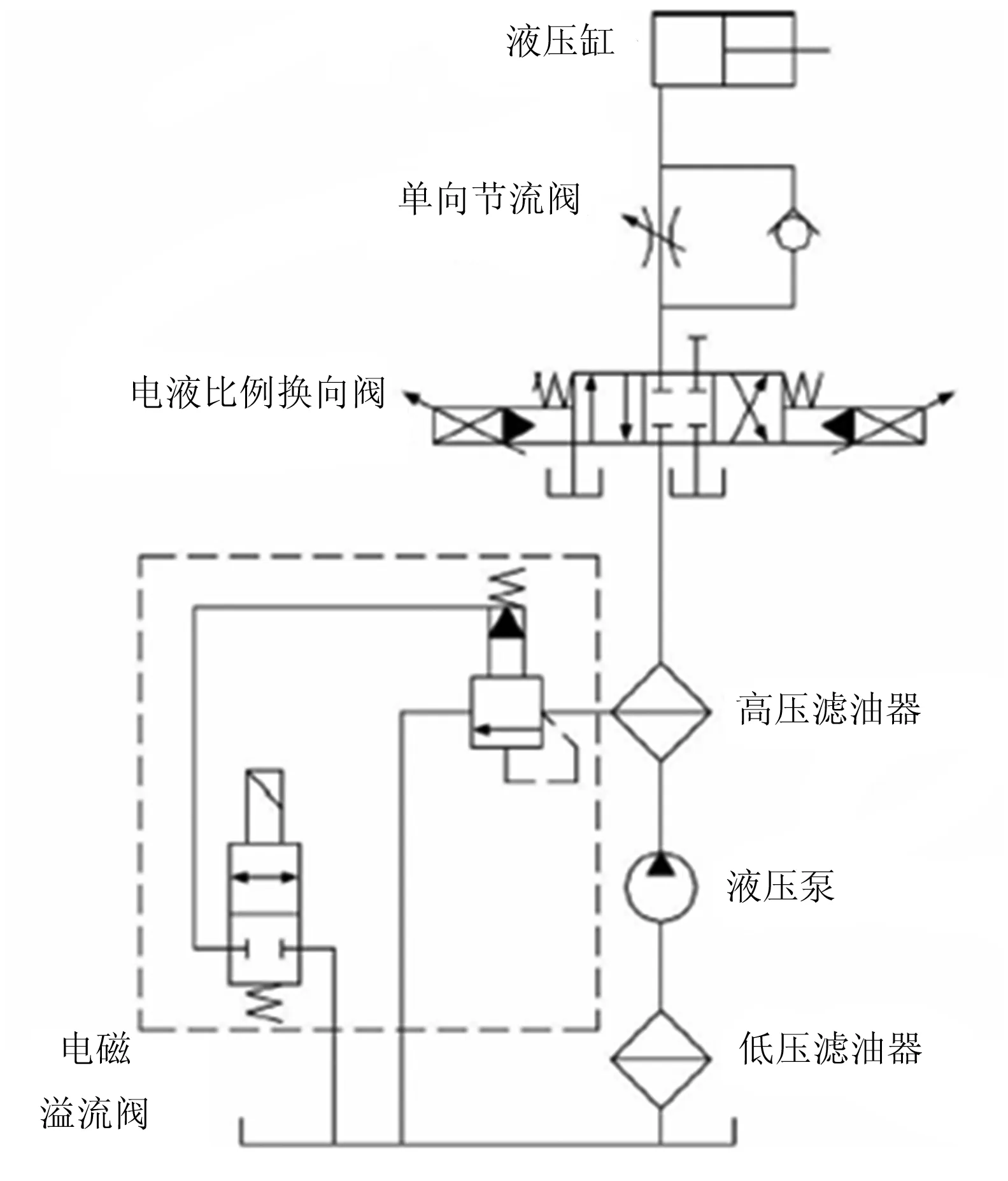
图4 液压系统构成
当换向阀的主阀芯在中位时,换向阀的所有通道都关闭,此时阀打开,液压油回到油箱;当阀芯在左位时,液压油进入油缸左腔,推动活塞运动,农具随之提升;当阀芯在右位时,油缸左腔和油箱相通,农具会在自重的作用下开始下降,油缸左腔内的油液回流到油箱中。
2.2 提升臂转角与耕深关系
模型中,设外提升臂顺时针旋转为正,逆时针为负,外提升臂水平状态记为0°,耕深记为农具质心相对初始位置垂直方向的位移。将外提升臂从水平位置逐渐顺时针旋转至30°,每隔2°记录一次耕深值。用线性关系拟合出数据趋势线,可以得到如图5所示的关系图。
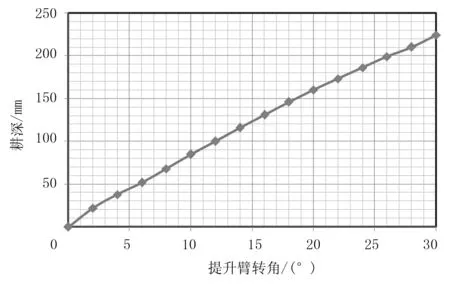
图5 外提升臂转角与耕深关系
耕深与外提升臂转角的线性关系为
y=7.3849x+8.3199
(1)
拟合的公式相关系数接近1,说明耕深值与提升臂转角的线性关系较为接近。因此,实际耕深测量时,只需要传感器测出外提升臂相对初始位置的转角,经过线性关系换算即可得出相应的耕深值。
2.3 耕深控制仿真分析
PID算法由比例、积分和微分算子组成[12]。比例控制器的输出和输入的偏差成比例,通过调整比例系数的大小使系统趋于稳定;积分项表示系统输入偏差的累积,有利于减小稳态误差;微分项表示输入偏差的变化率,通过预测变化的趋势,便于提前缩小偏差,有效提高系统的动态性能,通过这3项配合使用能够解决大部分工业中的控制问题。
对于简单的拖拉机电液悬挂系统位置控制,PID算法可以进行精确的控制,利用Simulation X软件中建立的模型[13-15],预先设置外提升臂转角值,并将外提升臂的实际相对转角作为反馈,调整比例、积分、微分3参数,仿真得到系统响应值。图6为位置控制下系统响应图。
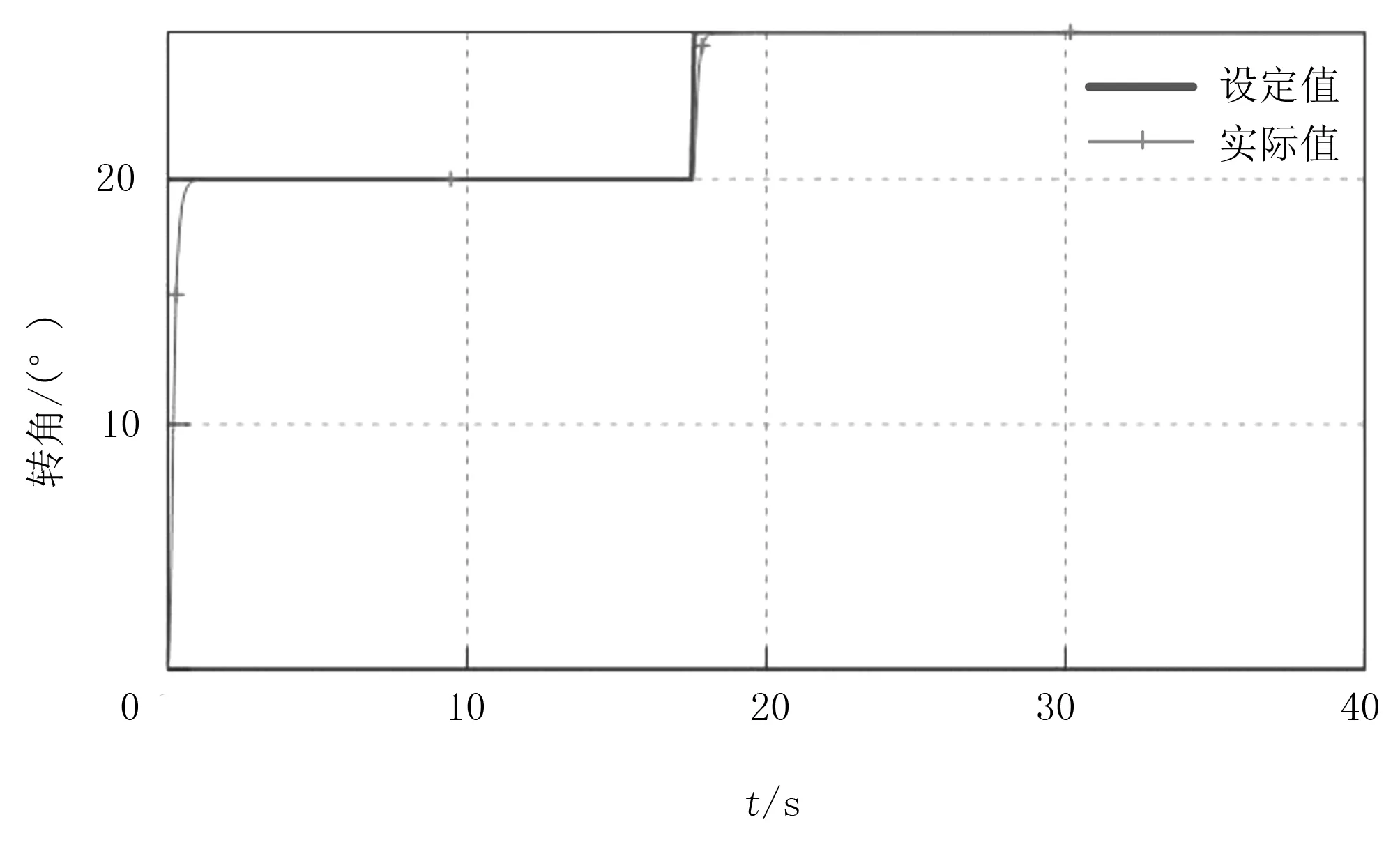
图6 位置控制系统响应
设置外提升臂转角初始为20°,然后变为26°,以测试系统的响应。图6中,粗实线表示设置的转角值,带十字细实线表示实际外提升臂转角值,即系统响应结果。结果表明:PID算法能够快速响应,1.2s后外提升臂转角达到设置的20°;当设置转角变为26°后,系统经过1.4s后达到设置的26°。此时,相应的耕深变化情况见图7所示。
由图7可以看出:在这一过程中,耕深值从160mm快速响应变为200mm。仿真结果表明:PID控制算法能够实现耕深变化的快速响应,且能够维持耕深的均匀性,也保证了作业过程中的稳定性。采用外提升臂转角间接测量耕深值,满足了对耕深均匀性的控制要求。
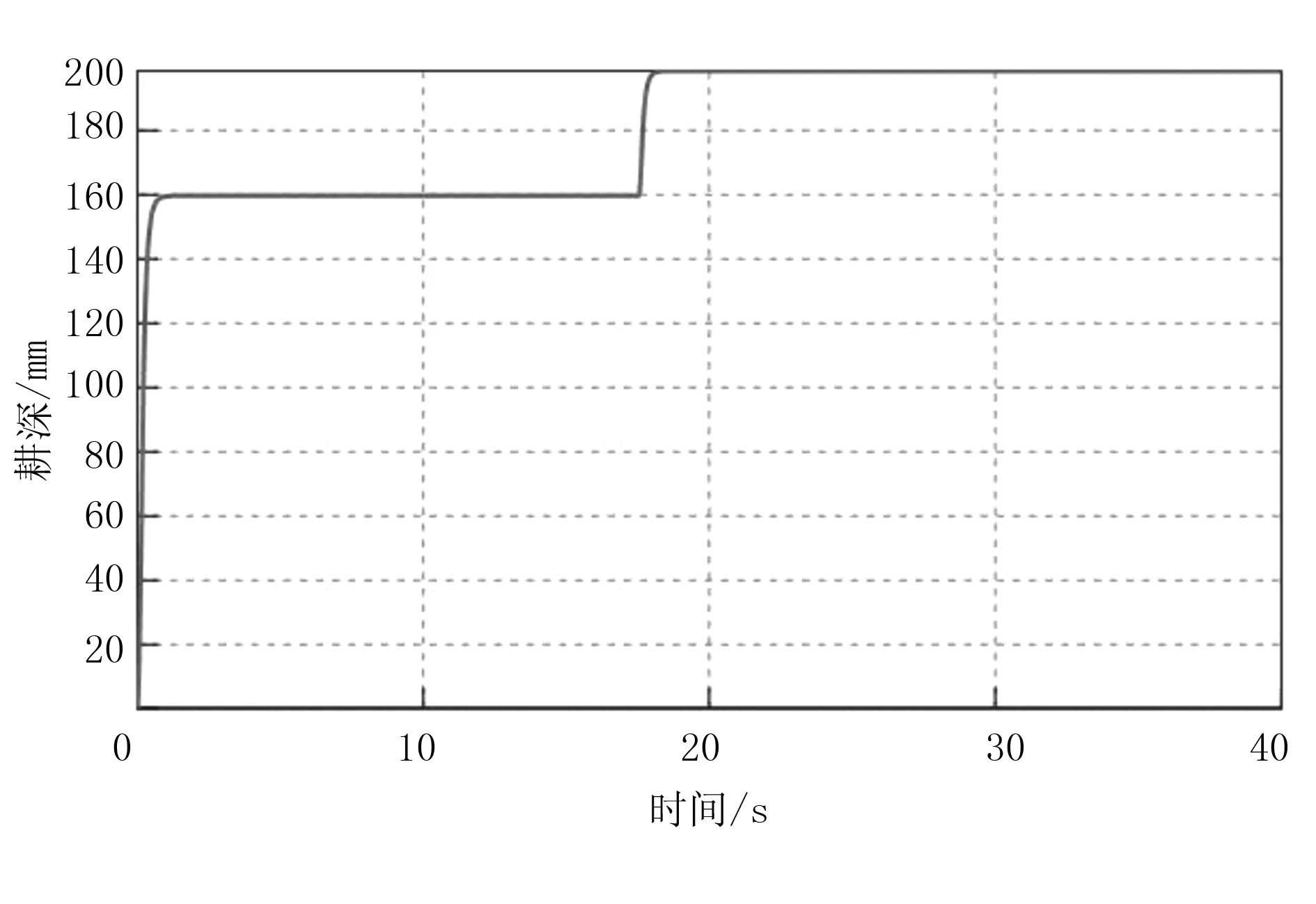
图7 位置控制耕深
3 田间试验及分析
为了验证设计系统的可行性,需要进行田间试验,通过安装电液比例阀、角度传感器、DSP处理器和控制面板等,将原有机械式液压悬挂系统改装为电控液压悬挂系统。首先,需要标定控制面板旋钮输出电压值,标记对应的耕深值;然后,标定角度传感器,测出机械转角与输出电压关系,并按照外提升臂转角与耕深关系,得到电压与对应耕深;最后,将程序下载至DSP处理器中并调试[16-17]。在测试过程时,先将农具下放至犁尖与地面接触处,拖拉机开始前行,并保持6km/h的时速。设定外提升臂转角为20°,按照转角与耕深关系,可以得到此时耕深应为156mm;待拖拉机行驶18s后,再将转角设置为26°,通过计算此时的耕深应为200mm。试验取拖拉机行驶40s的过程进行分析和研究。通过对农具后方的耕沟进行测量,就可以得到实际的耕深值。为了比对系统设定理论耕深、仿真结果和实际测量的耕深是否存在偏差,将三者的试验数据融合到图8中进行直观比较分析。
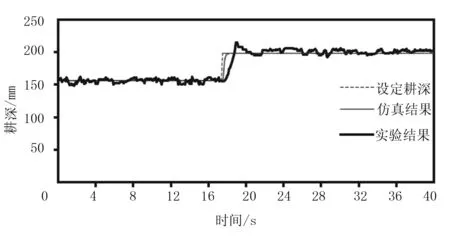
图8 试验结果与仿真结果对比
由图8可以看出:在前0~18s,耕深设为156mm时,实际耕深为156mm左右,只有较小幅度的波动;当将耕深设为200mm后,外提升臂下降,农具自动下放,此时耕深开始增加,由于惯性作用,当耕深达到200mm时,农具还会继续下放,随后回到200mm处,并始终维持在200mm左右,从耕深的切换到稳定工作时间小于2s。在实际的过程中,耕深存在较小的偏差是由于田间土地的不平整原因引起的,但整体趋于稳定。试验结果表明:采用外提升臂转角作为耕深值的间接测量方法也同样具备了较高的精度,并且简单易行;采用PID算法作为位置控制算法,能够很好地保持耕深的均匀性,且波动幅度较小。
4 结论
从耕深均匀性的耕作要求出发,设计开发了一种基于位置控制的拖拉机电控液压悬挂系统,通过测量外提升臂转角间接得到耕深值,保证了提升臂转角的稳定性。采集实际外提升臂转角作为负反馈,并应用PID控制算法,消除设定值与实际反馈值的偏差。仿真结果与田间试验结果均表明:提出的方法能够使农具准确、快速到达设定的耕深位置,响应速度快,并能够保证耕深的均匀性,大大降低了驾驶员的劳动强度。此外,还可以从燃油经济性的角度出发,基于牵引力均匀性提出阻力控制方法和滑转率控制方法,或者兼顾耕深均匀性和燃油经济性,提出位置与阻力的综合控制方法等。
[1] 李博, 李清荣, 何培祥, 等. 微耕机耕深自动控制系统[J]. 西南师范大学学报:自然科学版, 2015, 40(4):74-77.
[2] 聂友红, 康杰, 何家慧, 等. 耕深自动调节控制系统设计与试验研究[J]. 农机化研究,2015,37(2):143-145.
[3] Raheman H. An electromechanical implement lift system with position control for low horse power tractor[J].Agricultural Engineering International: CIGR Journal, 2014,16(4):112-121.
[4] 刘义, 高翔, 王寅晓, 等. 拖拉机电-液悬挂系统耕深自动控制的研究[J]. 机床与液压, 2012, 40(1):51-53.
[5] 罗锡文, 单鹏辉, 张智刚, 等. 基于推杆电动机的拖拉机液压悬挂控制系统[J]. 农业机械学报, 2015, 46(10):1-6.
[6] 谢斌, 李皓, 朱忠祥,等. 基于倾角传感器的拖拉机悬挂机组耕深自动测量方法[J]. 农业工程学报, 2013, 29(4):15-21.
[7] 朱思洪, 张超. 拖拉机电-液悬挂系统PID控制仿真研究[J]. 中国制造业信息化, 2008, 37(21):49-53.
[8] 李明生, 赵建军, 朱忠祥, 等. 拖拉机电液悬挂系统模糊PID自适应控制方法[J]. 农业机械学报, 2013, 44(S2):295-300.
[9] 鲁植雄, 郭兵, 高强. 拖拉机耕深模糊自动控制方法与试验研究[J]. 农业工程学报, 2013, 29(23):23-29.
[10] 曹磊磊, 高翔, 韩江义. 拖拉机悬挂机构参数对提升速比的影响[J]. 江苏农业科学, 2014, 42(5):344-346.
[11] 蔡高奎, 夏长高. 电动拖拉机电动悬挂系统的设计与性能仿真[J]. 农机化研究, 2015,37(1):140-143.
[12] 杨航, 刘凌, 阎治安, 等. 双闭环Buck变换器系统模糊PID控制[J]. 西安交通大学学报, 2016, 50(4):35-40,67.
[13] 曹恺, 王伯铭, 王孔明. 基于ADAMS的悬挂式单轨车辆曲线通过性能分析[J]. 机车电传动,2016(1):75-78,83.
[14] 韩晓东, 刘冬, 丛明, 等. 基于Plant Simulation的发动机检测生产线仿真分析[J]. 组合机床与自动化加工技术, 2015(11):58-60,64.
[15] 王荣, 王宏宇, 金镜, 等. 基于 ANSYS 的大耕深旋耕刀结构优化设计[J]. 农机化研究, 2015,37(5):136-139.
[16] 陈婉秋, 陈雄, 高峰, 等. 基于DSP的目标跟踪半实物仿真系统设计[J]. 电光与控制, 2016,23(2):61-64.
[17] 张强, 冯仰松, 郭朋. 基于多核DSP互联架构的SAR处理研究与设计[J]. 电子技术应用, 2016,42(1)37-39, 43.
Electronic-Control Hydraulic Hitch System of Tractor with Tillage Depth Uniformity
Song Ling1, Xie Zhiyong2
(1.Department of Mechanical, Huaihua Vocational and Technical College, Huaihua 418000, China;2. Department of Mechanical and Electrical Engineering, Loudi vocational technical college, Loudi 417000, China)
As the tillage depth uniformity is an important measure in the process of tractor’s work, a control method of tractor’s electronic hydraulic hitch system with tillage depth uniformity is proposed. Firstly, the system structure and depth control principle are introduced. Secondly, a physical model of the system is established, and the relationship between the lifting arm angle and tillage depth is analyzed, thereby lifting arm angle is used to indirectly measure actual depth value. PID control algorithm for the system of the depth control process is simulated and analyzed. The tillage depth value is set as an input, actual depth value is negative feedback, and the correction of actual deviation with the set value of deep tillage is implemented online. Finally, the field testverifies the 156mm and 200mm depth value of the deep tillage control process, and proves the feasibility of the control method. The results show that the proposed control method can ensure uniformity of the process of cultivating deep tillage, and also reduce the intensity of the driver's operation.
tractor; electronic-control hydraulic hitch system; tillage depth uniformity; PID control
2016-06-14
国家自然科学基金项目(51175173);湖南省农业机械管理局企业创新项目(2014-3)
宋 玲(1982-),女,湖南怀化人,讲师,硕士,(E-mail)sling82@126.com。
S219.033;TH173
A
1003-188X(2017)08-0237-05
