基于偏差率的悬挂式深松机力位综合控制策略探析
2019-01-14杨少奇张磊李玲玲
杨少奇 张磊 李玲玲


摘要 为了能够有效地克服深松作业中单独位控制时发动机负荷不稳定和单独力控制时耕深不均匀的缺点,本文提出了一种基于耕深偏差率和牵引阻力偏差率之比的力位综合控制策略,不仅可以保证耕深的均匀性,而且还能兼顾发动机负荷的稳定性。通过理论分析和计算提出的这种力位综合控制策略,以期为拖拉机电液悬挂系统的力位综合控制提供参考,进而提高深松作业效果和作业质量。
关键词 悬挂式深松机;偏差率;耕深;力位综合控制;策略
中图分类号 TP273;S233.1 文献标识码 A
文章编号 1007-5739(2019)23-0149-02 開放科学(资源服务)标识码(OSID)
与传统机械式液压悬挂系统相比,电控液压悬挂系统利用控制器、传感器和智能算法等先进的仪器和技术,可以有效地实现力控制、位控制和力位综合控制等多种控制方式,有利于提高作业效率和作业质量[1]。其中,力位综合控制不仅可以保证耕深的均匀性,还能兼顾发动机负荷的稳定性,有效地克服了单独位控制时发动机负荷不稳定和单独力控制时耕深不均匀的缺点。
现有力位综合控制的实现方式是先把力传感器测得的牵引阻力通过土壤比阻换算为等价耕深[2],再利用综合系数(也称权重系数,在0~1之间)把换算后的等价耕深值与位传感器测得的实际耕深值进行加权和,得到一个综合耕深值,最后将综合耕深值与目标耕深值进行比较,通过控制器的智能控制算法,输出控制信号,实现耕深的自动控制[3-8]。不过,这种控制方式在对牵引阻力进行等价耕深换算时需事先假定一个常数,即土壤比阻。这种将牵引阻力值通过固定的土壤比阻值进行换算的方式难以适应复杂的土壤环境以及土壤比阻波动范围比较大的工作环境。
事实上,可以利用传感器实时检测获得的牵引阻力值和实际耕深值计算出实时的土壤比阻。在获取实时土壤比阻数据的基础上,本文探索一种基于偏差率的力位综合控制策略,以期提高力位综合控制的适用性。
1 系统结构
力位综合控制系统主要包括拖拉机、悬挂式深松机、拉力传感器、倾角传感器和控制器。其中拉力传感器有3个,分别安装在上拉杆、左下拉杆和右下拉杆上;倾角传感器有2个,分别安装在上拉杆和左下拉杆上。系统的总体结构方案如图1所示。
2 力位测量原理
2.1 牵引阻力测量原理
田间深松作业时,通过对电液悬挂的受力分析,易知上拉杆受压力,左、右下拉杆受拉力。以悬挂式深松机为研究对象,作用于悬挂式深松机的水平方向上的受力图以及各作用力的受力方向如图2所示。F1的大小等于中拉杆上拉力传感器测得的数值,方向沿着中拉杆的轴线方向;F2和F3的大小分别是左下拉杆和右下拉杆上的拉力传感器测得的数值,方向沿着下拉杆的轴线方向[9]。
由深松机在水平方向上受力平衡可得关系式,即:
F1cosβ+(F2+F3)cosα+F4=0(1)
由式(1)可求得牵引阻力F4。
2.2 耕深测量原理
建立下拉杆角度α与深松机耕深h的数学关系模型,即可通过采集到下拉杆的倾角数值,可以得到耕深数值。悬挂式深松机的三点悬挂运动结构,如图3所示。其中A为下铰接点,B为上铰接点,C为上悬挂点,D为下悬挂点,A、B、C、D组成四连杆机构,A、B视为机架固定不动,杆CD(即深松机)通过拉杆BC和拉杆AD的连接可以绕着机架旋转,从而实现深松机的提升或降落。
在深松机从最高点降落到最低点的过程中依次测量若干个数据点,{(αi,hi)}(i=0,1,…,n),利用最小二乘法求出拟合曲线,找出映射关系式,即:
h=b0+b1α(2)
式(2)中,b0为截距(cm);b1为斜率;建立耕深测量的数学模型,计算补偿值。将深松机调到任意位置保持不动,人工测量的实际耕深与通过下式计算的耕深之间的差值即为补偿值。
h=b0+b1α+c(3)
式(3)中,c为补偿值(cm)。
2.3 实时土壤比阻计算原理
实时的土壤比阻数据能够为力位综合控制提供控制依据。控制器实时应采集倾角传感器和拉力传感器的信号,经过事先输入的公式计算出对应的耕深和牵引阻力,可以计算出实时的土壤比阻,计算公式如下:
3 力位综合控制原理
3.1 等偏差率控制原理
首先,确定田间作业的基准耕深h0。然后,通过田间预作业一定距离(30 m左右),利用控制器采集传感器的数据并计算得到预工作的土壤比阻,其数值范围为(k1,k2)。取其中位数(k1+k2)/2作为基准土壤比阻。
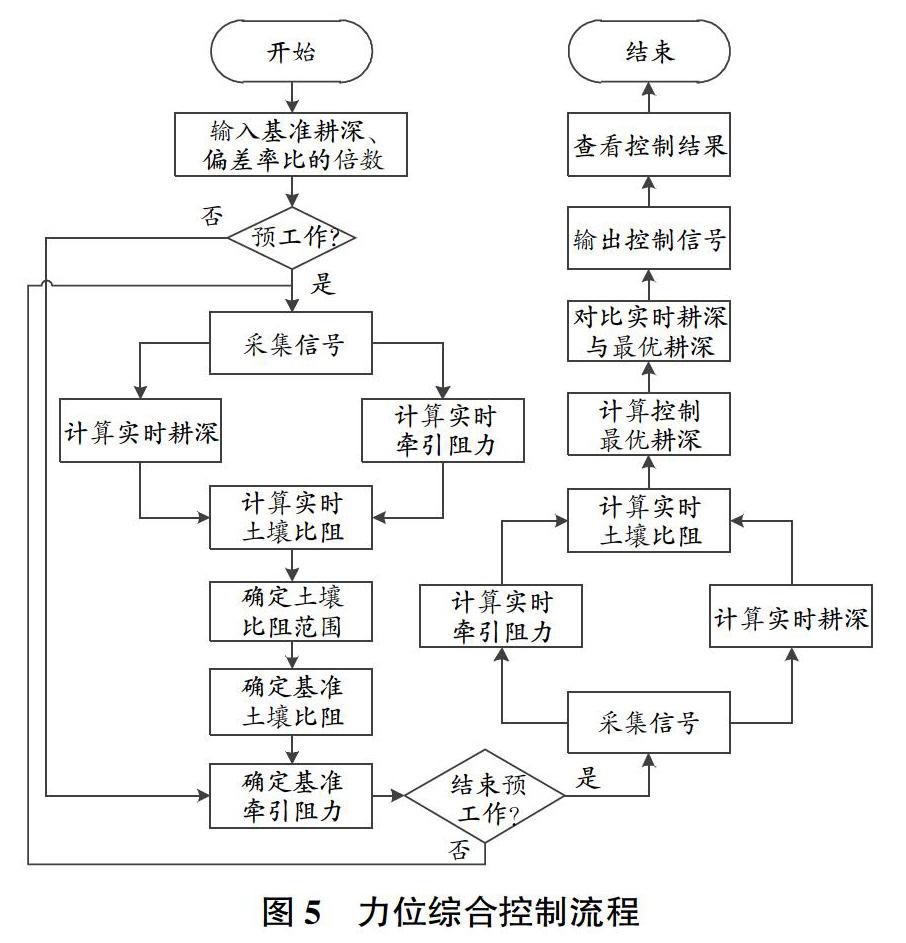
力位综合控制流程较为复杂,具体流程如图5所示。建立牵引阻力测量模型和耕深测量模型,通过采集拉力传感器信号和倾角传感器信号计算得到实时牵引阻力和实时耕深,利用实时牵引阻力和实时耕深得到实时土壤比阻。在实际控制中,首先确定基准耕深和p值,然后,进行一定距离的田间预作业以获得基准土壤比阻,根据基准土壤比阻确定基准牵引阻力。此时,假定一个最优耕深并分别表示出在最优耕深时的耕深偏差率和牵引阻力偏差,令两者之比的绝对值等于p,用解方程求解出的最优耕深作为实际控制中的控制目标,通过对比实时耕深与最优耕深,输出控制信号,实现力位综合控制。
4 结语
本文建立了牵引阻力测量模型和耕深测量模型,通过采集拉力传感器信号和倾角传感器信号计算得到实时牵引阻力和实时耕深,并利用实时牵引阻力和实时耕深获得实时土壤比阻。通过建立最优耕深时的耕深偏差率和牵引阻力偏差率之比为p的倍偏差率的方程,求解出最优耕深值。提出了以最优耕深为控制目标的力位综合控制策略,并画出力位综合控制流程,实现了力位综合控制。
经过理论分析和计算提出的这种力位综合控制策略,为拖拉机电液悬挂系统的力位综合控制提供了参考,以期提高深松作业效果和作业质量。
5 参考文献
[1] 鲁植雄,郭兵,高强.拖拉机耕深模糊自动控制方法与试验研究[J].农业工程学报,2013,29(23):23-29.
[2] 陈志.农业机械设计手册(下)[M].北京:中国农业科学技术出版社,2007:1858-1859.
[3] 赵国栋.电动拖拉机电动悬挂装置设计与试验研究[D].北京:中国农业科学院,2019.
[4] 马勇,李瑞川,李玉善,等.不同土壤比阻下拖拉机耕深均匀性研究[J].农机化研究,2019,41(12):156-160.
[5] 赵建军,朱忠祥,宋正河,等.重型拖拉机电液悬挂比例控制器设计[J].农业机械学报,2014,45(增刊1):10-16.
[6] 谢凌云.大马力拖拉机电液悬挂系统耕深自动控制研究[D].镇江:江苏大学,2016.
[7] 王素玉,刘站,李瑞川,等.基于土壤比阻的大功率拖拉机变权重力位综合控制研究[J].农业机械学报,2018,49(2):351-357.
[8] 商高高,谢凌云,季顺静.拖拉机悬挂系统耕深自动控制策略的研究[J].中国农机化学报,2016,37(7):136-140.
[9] 杨少奇.基于BP神经网络的土壤比阻预测模型[D].长春:吉林大学,2019.
