果实采摘机械手的结构设计及工作能力研究
2017-12-16陈艳艳申东东
陈艳艳,申东东
(鹤壁职业技术学院 机电工程学院,河南 鹤壁 458030)
果实采摘机械手的结构设计及工作能力研究
陈艳艳,申东东
(鹤壁职业技术学院 机电工程学院,河南 鹤壁 458030)
随着社会经济水平的不断提高,我国农林业取得长足发展,果农在种植水果时开始逐渐引进机械化、自动化设备,以提高种植效率。传统收获时果农最为繁忙的季节就是成熟季,果农常需要花费大量人工采摘果实,不仅效率低,且有一定危险性,采摘机器人便在这样的背景下诞生了。为此,针对采摘机器人的工作原理、工作空间,结合采摘作业实际需求,进行采摘机械手的结构设计及工作能力评价,旨在为相关产业发展提供理论依据。
果实采摘机械手;结构设计;工作能力
0 引言
随着我国农业发展规模的不断壮大,对相关技术多样化、精准化、高效化的要求更为迫切,农业开始逐渐实现机械化及智能化。目前,农业机器人已经在农业生产中发挥重要作用,通过机器人可实现农业育苗、种植、移栽、组织培养及果实收获等作业,并展现出广阔的应用前景。机器人可提升果实采摘效率,降低采摘过程中造成的损伤率。统计表明:果实采摘占据整个农业生产费用接近50%。为降低过时采摘成本,提高农民收入,研制果实采摘机器人成为农业发展重要一环。目前,欧美发达国家已经开始使用果实采摘机器人辅助果农展开果实采摘作业。例如,荷兰已经开始使用黄瓜采摘机器人。水果采摘机器人具有较强通用性,主要基于水果采摘方式较为类似。随着我国水果种植量不断增加,果园面积与日俱增,研制并使用果实采摘机器人协助生产已经成为大势所趋。
1 果实采摘机器人研制的难点
相比于工业机器人,果实采摘机器人在工作上存在一定难度。首先,果实采摘机器人的作业对象复杂程度高。不同于工业生产,果实具有一定柔软性,同一果树上发育程度不同,各种物理及机械特性差异大,果实采摘机器人缺乏人类自主判断能力,在采摘过程中要避免伤到果树及果实有一定难度。农作物随时间和季节变化较大,由此导致果实采摘机器人作业环境具有多变性。果实成熟时一般都是夏秋季节,果树枝繁叶茂,很多果实重叠生长,果实采摘机器人难以发现被隐藏在内部的果实,且采摘机器人需要在采摘过程中识别枝叶和果实,并能够成功避开障碍采摘果实。不同于工业机器人使用需进行专业培训,使用果实采摘机器人的对象均为农民,文化程度较低,难以操作现代化程度较高的机器人,因此要求机器人操作具有一定的人性化特点,只需要进行简单操作便可执行相关动作。
由于果实采摘机械手在程序及感应能力上有较高要求,制造成本较高,对农民而言难以接受,因此需要研制出低成本、高效、人性化及智能化果实采摘机械手,就技术层面来看难度较大。
2 果实采摘机械手结构设计
基于果实采摘机械手需求,结合我国果实采摘实际状况展开果实采摘机械手设计。从已有经验来看,当前有两种机械手结构较为实用:一是柔性拨簧式采摘工作装置;二是直流变频振动式采摘工作装置。第2种机械手是目前使用较多的形式,也是本文采用的设计方式。直流变频振动式采摘工作装置具有稳定性强、结构科学易操作等特点,如图1所示。
机械手作为果实采摘机器人最关键部位,其结构及相关参数必须设计合理,才能够保证采摘作业的有效完成。在进行机械手设计前必须确定相关参数,如机械手的自由度、关节数、机械配置及组成形式等。从经验来看,其自由度一般不少于6。其中,有3个自由度是决定机械手位置的关节,可以是旋转关节或移动关节。关节形式可多种多样,一般有4种基本形式,分别为关节型、圆柱坐标、直角坐标及极坐标。美国在进行番茄采摘机器人研究时,主要采用仿生学原理模仿人类手臂执行采摘作业,并可实现一些难度较高的作业,其结构如图2所示。其通过手腕绕固定轴旋转能够实现多个复杂动作,真正实现人体仿生,将机械手臂分为手腕和手臂两部分,结合适当驱动可做出各种复杂动作。

1.采摘手柄 2.支撑支撑座右铭 3.护罩壳 4.偏心转轴 5.偏心轮

1.机械手末杆关节 2.末端执行器 3.采摘目标
确定工作装置后即可对机构进行选型。机械手基本结构为空间链式,相比于工业机器人作业环境,果实采摘机器人在作业环境复杂性及不确定性上更上一层,因此在进行果实采摘机械手选型时主要注重以下几点:首先,机械手必须具备最优工作空间;机械手需要应对不同种类果实采摘工作,因此只有具备足够工作空间才能提高通用性。机器人作业时,其机械手臂围绕转动关节作业,其活动范围如图3所示。
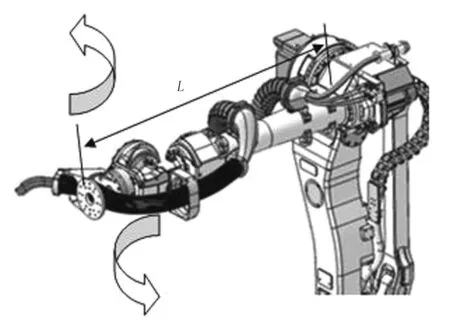
图3 机械手臂活动范围
从图3可以看出:机械手臂活动范围主要为绕其关节转动的球形几何体范围内。因此,当手臂关节到顶点处长度L越长,其工作范围越大。此时,若再拥有足够自由度,便可实现自由旋转及伸缩,通用性良好。机械手臂工作空间可用公式为
Vn= V (4L3/3)
Vn为体积指标;V为工作空间的体积;L为机械手臂关节到顶点总长度;为自由度。
本文采用自由度为6的机械手臂,经计算其机械手臂长度取3.4m最佳。
机械手臂不仅要具备一定工作空间,还需要具备一定人工智能系统,要具备的最基本能力为自动避障。植物茎叶生长具有一定随机性,因此机械手臂在采摘过程中需要避免伤到茎叶,同时需要避免茎叶对采摘工作带来的不便。驱动系统需要结合智能控制系统选择合适行进路线及手臂运动形式。本文采用传感器结合单片机控制系统,从根本上改变传统采摘机械手智能化低下的现状。通过输入程式控制机械手,操作人员可通过摄像头观测到的状况对机器手进行调整。对一般状况,机械手可自行做出准确判断;对于一些突发状况,可自动启动紧急状况预警系统,停止作业并将信号传递到操作人员,操作人员可现场判断并做出决策。机械手作业程序较为复杂,其工作流程如图4所示。

图4 果实采摘机器手臂工作流程图
机械手最为关键的是抓取结构,由于果实存在各种不同形状,采摘过程中要求机械手具有较强柔性。本文结合常见果实形状,设计出一种柔性较高可调节抓取结构的机械手,如图5、图6所示。
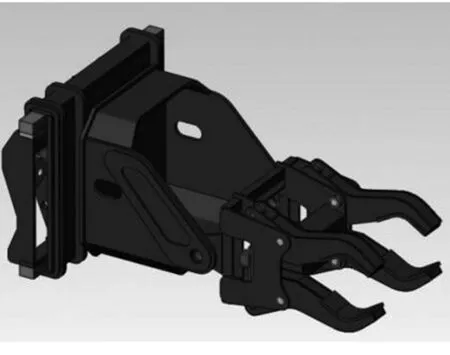
图5 机械手结构1

图6 机械手结构2
这两种结构分别应对不同形状果实,只要根据具体要求更换机械手抓取机构即可。抓取机构更换简单,且通过通用程式调节。机械手结构1针对长条状果实有良好采摘效果,如各种黄瓜、丝瓜等。若遇到类似球形果实,可将机械手更换为机械手结构2,四爪机构能够有效将球状果实抓住,保证4个接触点具有相同受力。果实采摘机器人工作时,主要由夹持装置抓取需要采摘对象,并由驱动装置为其提供工作所需要的动力。压力传感器可控制夹持装置夹取果实的压力,确保果实可以被有效摘取却不对果实外表及内部造成刮伤及夹伤。自由伸缩及切割装置可控制末端执行器自由伸缩,进行果实采摘及放置工作。
3 果实采摘机械手数据分析
果实采摘机械手的运动需要结合被采摘对象进行数据分析,只有通过科学的数据分析才能够在根本上保证采摘工作顺利展开。大多数果实均为椭圆形,因此本文以苹果为例展开数据分析。
首先,分析苹果形变时的弹性性能。苹果收到机械手挤压力作用会发生弹性形变,抓取过程中只要苹果不运动,其动力势能不变,机械手机械能转变为苹果形变势能。假设空间直角坐标系为xyz,δx、δy、δz、Txz、Tyz、Tzx分别为6个应力分量,其中δx、δy、δz为3个方向正应力,γxz、γyz、γzx为切应力,ξx、ξy、ξz为线应变。由此计算应变能密度,则
vξ=1/2(δxξx+δyξy+δzξz+Txzγxz+Tyzγyz+Tzxγzx)
通过积分表示苹果形变势能Vξ为
Vξ=∫∫∫vξdxdydz,由此可解得
Vξ=1/2(δxξx+δyξy+δzξz+Txzγxz+Tyzγyz+Tzxγzx)dxdydz
苹果在运动过程需要建立其微分方程,将苹果任意位置的移动分量用u、v、w表示,加速度分量分别为ρ∂2u/∂t2,ρ∂2v/∂t2、ρ∂2w/∂t2,设体力分量分别为fx、fy、fz,平衡方程为
∂δx/∂x+∂Tyx/∂y+∂Txz/∂z+fx-ρ∂2u/∂t2=0
∂δy/∂y+∂Tyz/∂z+∂Txy/∂x+fy-ρ∂2v/∂t2=0
∂δz/∂z+∂xz/∂x+∂Tyz/∂y+fz-ρ∂2w/∂t2=0
于是可得基本方程为
δx=E[uθ/(1-2u)+ξx]/(1+u)
δy=E[uθ/(1-2u)+ξy]/(1+u)
δz=E[uθ/(1-2u)+ξz]/(1+u)
Tyz=Eγyz/[2(1+u)]
Tzx=Eγzx/[2(1+u)]
Txy=Eγxy/[2(1+u)]
其中,E为弹性模量。由此可得几何方程为
ξx=∂u/∂x,ξy=∂u/∂y,ξz=∂u/∂z
γxz=∂u/∂z+∂w/∂x,γyz=∂w/∂y+∂v/∂z,
γxy=∂v/∂x+∂u/∂y
删除体力分量,可重新整理运动微分方程为
∂2u/∂t2=E[∂θ/(1-2u∂x)+Δ2u)/(2ρ(1+u) ]
∂2v/∂t2=E[∂θ/(1-2u∂x)+Δ2v)/(2ρ(1+u) ]
∂2w/∂t2=E[∂θ/(1-2u∂x)+Δ2w)/(2ρ(1+u) ]
θ=∂u/∂x+∂v/∂y+∂w/∂z
Δ2=∂2/∂x2+∂2/∂y2+∂2/∂z2
苹果采摘过程三维运动均可通过该方程表示。
苹果采摘时需要确定其重心。首先建模,球形模型为(x-a)2+(y-b)2+(z-c)2-R2,表达形式为2ax+2by+2cx+R2-(A2-B2-C2)=x2+y2+z2。
若对于n个点,上式矩阵形式为
将该式简化为Am=B。其中,m可利用最小二乘法算出为m=(ATA)-1ATb,由此可得球心坐标。
为保证算法计算精度及效率,可利用八点法进行目标位置求解。机械手精度范围内矩形区域左上角点为(xmin,ymin)、右下角为(xmax,ymax),则矩阵内部随意一点均可表示为
x=xmin+rand()%(xmax-xmin)
y=ymin+rand()%(ymax-ymin)
其中,rand()为C++程序自动生产的均匀分布随机函数,在0~32~767之间,%为余数识别定位流程如图7所示。
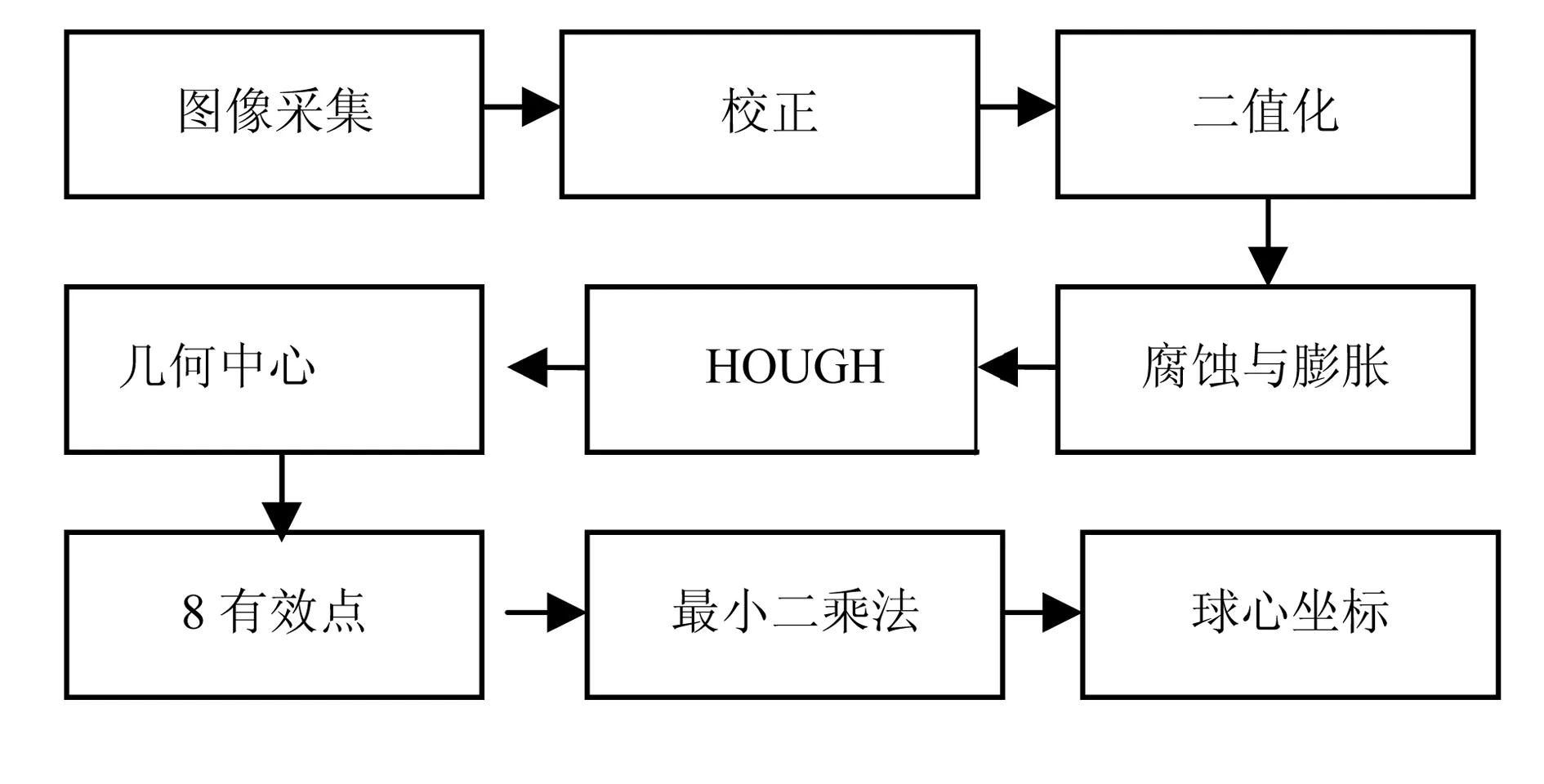
图7 识别定位流程图
4 结论
本文所述的果实采摘机械手具备一定通用性,采摘果实十分理想,可用于实际生产。其通过简单思想实现复杂作业,成本低廉,且果农可在经济承受能力范围内购进,提高了生产效率并降低成本。
[1] 方建军.移动式采摘机器人研究现状与进展[J].农业工程学报,2014(2):273-278.
[2] 阎 宏.Java 与模式设计[M].北京:电子工业出版社,2002.
[3] 钱锡康.七自由度机器人机械结构设计[J].北京航空航天大学学报,1998,2(3):354-357.
[4] 日本机器人协会.机器人技术手册[K]. 北京: 科学出版社, 2012.
Study on Structure Design and Working Ability of Fruit Picking Manipulator
Chen Yanyan, Shen Dongdong
( Hebi Polytechnic,Hebi 458030,China)
With the continuous development of social economy, agriculture and forestry in China achieved rapid development, growers in fruit planting began the gradual introduction of mechanization and automation equipment to improve the efficiency of planting. The traditional out of date harvest is mainly started by artificial operation. The busy season is fruit ripening season planting fruit trees consequences of agricultural, farmers often need to spend a lot of artificial cost picking fruit. Hand picking is not only a low success rate, and there is a certain risk, mechanical picking to replace artificial picking has become an important driving force for fruit market development, the robot is born in this context of the picking robot. Picking robot research mainly from its working principle, working space combined with the actual demand of picking operation. Through the picking robot can effectively reduce the uncertainty of artificial operation, and fundamentally improve the fruit picking efficiency. In this paper, the structure design and work ability of fruit picking manipulator is studied, which provides theoretical basis for the development of related industries.
fruit picking manipulator; structural design; work ability
2016-06-15
河南省教育厅科学技术研究项目(15B520188)
陈艳艳(1984-),女,河南新乡人,实验师,(E-mail)chenyanyan0617@163.com。
S225.93
A
1003-188X(2017)10-0137-04
