自激振动力补偿红枣振动采收试验装置设计
2017-12-16张慧明刘玉冬
崔 健,张慧明,付 威,坎 杂,刘玉冬
(1.石河子大学 机械电气工程学院,新疆 石河子 832003;2.新疆生产建设兵团农业机械重点实验室,新疆 石河子 832003)
自激振动力补偿红枣振动采收试验装置设计
崔 健1,2,张慧明1,2,付 威1,2,坎 杂1,2,刘玉冬1,2
(1.石河子大学 机械电气工程学院,新疆 石河子 832003;2.新疆生产建设兵团农业机械重点实验室,新疆 石河子 832003)
针对传统的树冠强迫振动方法作业过程中采收效果差及伤树(枣)率高等问题,提出一种将自激振动理论与力补偿理论相结合的振动采收方式,并设计出一种基于自激振动力补偿的红枣采收试验装置,以提高振动采收效果,降低红枣与果树的损伤。为此,介绍了试验装置的结构与工作原理,并对关键工作部件进行了设计。通过对激振装置主要运动部件的运动过程进行理论分析,获得了拨杆滚筒的运动学方程,得出了拨杆滚筒的振幅表达式并分析了主要影响因素,同时计算出拨杆滚筒需要力补偿控制系统进行激振力补偿的扭转角度阈值为19.4°,为红枣采收试验装置的试验研究提供了理论基础。
红枣;采收;自激振动;力补偿
0 引言
红枣(jujube)是我国广泛种植的特色林果[1],其种植面积和产量均占全世界的99%[2-3]。枣树适应性强,结果稳定,便于管理,同时能防风固沙,具有良好的生态价值;红枣营养丰富,用途广泛,其药用价值和经济价值极高。截止2014 年底,新疆红枣种植面积已经达到50.7万hm2,占全国红枣总面积1/3,位居全国第1位[4]。新疆红枣种植业的迅猛发展提升了红枣收获机械的市场需求。
红枣收获作业是枣园生产全过程中最重要的环节,其季节性强、劳动密集,所用劳动力占整个生产过程所用劳动力的35%~45%[5]。近年来,国内外相继开展对红枣机械采收的相关研究。2003年,韩国忠南国立大学S.W.Lee对红枣的物理力学特性进行研究,研制了一种基于树冠振动的红枣收获机,采收率达到95.8%[6]。2009年,新疆农垦科学院机械装备研究所研制出一种采用抱摇式收获方法的4YS-24 型红枣收获机,适于收获树干直径大于100mm的枣树,采净率达到85%以上[7]。目前,国内外红枣收获方式主要采用惯性激振器产生强制性振动,实现枣-枝分离。该种方式在采收过程中枝条与拨杆容易发生缠绕,并造成果枝的大面积摩擦损伤和果品的击打损伤。因此,提出将自激振动与力补偿理论相结合的方式,并设计了一种基于自激振动力补偿的红枣采收试验装置,旨在为红枣收获技术的研究提供参考。
1 结构组成及工作原理
1.1 结构组成
本文设计的红枣采收试验装置可分为机械采收系统和电控系统两个部分,如图1所示。机械采收系统主要由机架、拨杆滚筒、弹性元件、电动车及夹具等组成;电控系统主要由伺服电机与驱动器、角度传感器、扭矩传感器及PLC控制箱等组成。其中,夹持装置通过螺栓固定于电动车上,电动车放置于支撑架的轨道上。拨杆滚筒与机架通过轴承相连,滚筒立轴上下两端对称安装一对弹性元件,立轴上端与角度传感器相连接,下端与扭矩传感器和伺服电机相连接,角度传感器、扭矩传感器及电机,均与可编程控制器PLC相连,构成力补偿控制系统。
1.2 工作原理
工作时,枣树利用夹具固定于电动小车上,电动小车在电动机带动下沿试验台轨道前进;当枣树到达激振装置工作区域时,振动拨杆插入枣树树枝,拨杆受到枣树枝的阻碍,使弹性元件发生形变产生扭转力矩,从而起到蓄能作用;当拨杆克服枣树枝的阻碍,随之弹性元件产生弹性恢复力,通过振动拨杆反作用于树枝。由于树枝粗细不同,弹性元件的扭转力矩时刻发生变化,因此拨杆受到树枝的阻碍产生的激振力是多变的、无规律的,不能提供定量的、持续作用的区间力,此时采用自动控制系统及力补偿机构对拨杆产生多变的激振力实施力的补偿,使拨杆产生的激振力维持在一定区间,满足振动采收激振力的要求。由PLC、伺服电机及驱动器、角度传感器,扭矩传感器组成了力补偿控制系统,将角度传感器及扭矩传感器采集到的角度和扭矩信号通过通信线传递给PLC,PLC将信号反馈给伺服电机及驱动器,进而完成力的补偿,完成红枣收获过程。

(a) 主视图

(b) 俯视图
1.角度传感器 2.双膜片联轴器 3.弹性元件 4.拨杆滚筒 5.扭矩传感器 6.伺服电机 7.驱动器 8.PLC 9.控制箱 10.变频器 11.电机 12.夹持装置 13.配重箱 14.电动小车 15.支撑架 16.机架 17.轨道
图1 基于自激振动力补偿红枣采收试验装置结构示意图
Fig.1 Structure diagram of jujube harvest test device based on self-excited vibration and force compensation
2 主要结构部件设计
2.1 激振装置
激振装置是试验装置的核心部分,主要通过弹性元件提供的回复力及力补偿控制系统提供的激振力实现枣-枝分离。激振装置主要由拨杆滚筒、立轴、弹性元件及轴承等组成。
2.1.1 拨杆滚筒的设计
通过对枣树树枝拓扑结构的统计分析,确定拨杆滚筒的结构参数及拨杆的空间分布与距离。拨杆在采收过程中与枣树和红枣直接接触,因此拨杆的材料选择及外形尺寸的设计将直接影响采收率和损伤率。为了尽量减少采收过程中拨杆对枣树树枝及红枣的击打损伤与摩擦损伤,同时参考国内外其他果蔬采收机械的研究与使用经验,本装置(见图2)采用稳定性和柔韧性较好的PA6柔性聚酰胺棒。根据枣园调研,枣树树冠直径在1~2.2m左右 ,拨杆的长度应介于最大树冠半径和最小树冠半径之间[8],选择长度为530mm、直径为15 mm的圆柱形杆。拨杆滚筒主体选用直径200mm、壁厚10mm的薄壁圆管,圆管两端焊接实心堵头及实心滚筒轴,轴端开有键槽,用于连接伺服电机、角度传感器及扭矩传感器等力补偿系统元件。滚筒主体均布15×10个直径为15mm的通孔,并在通孔上焊接螺母与套丝的拨杆进行螺纹紧固连接,在拨杆套丝一端放置平垫和弹垫,以防止拨杆在振动过程产生松动。
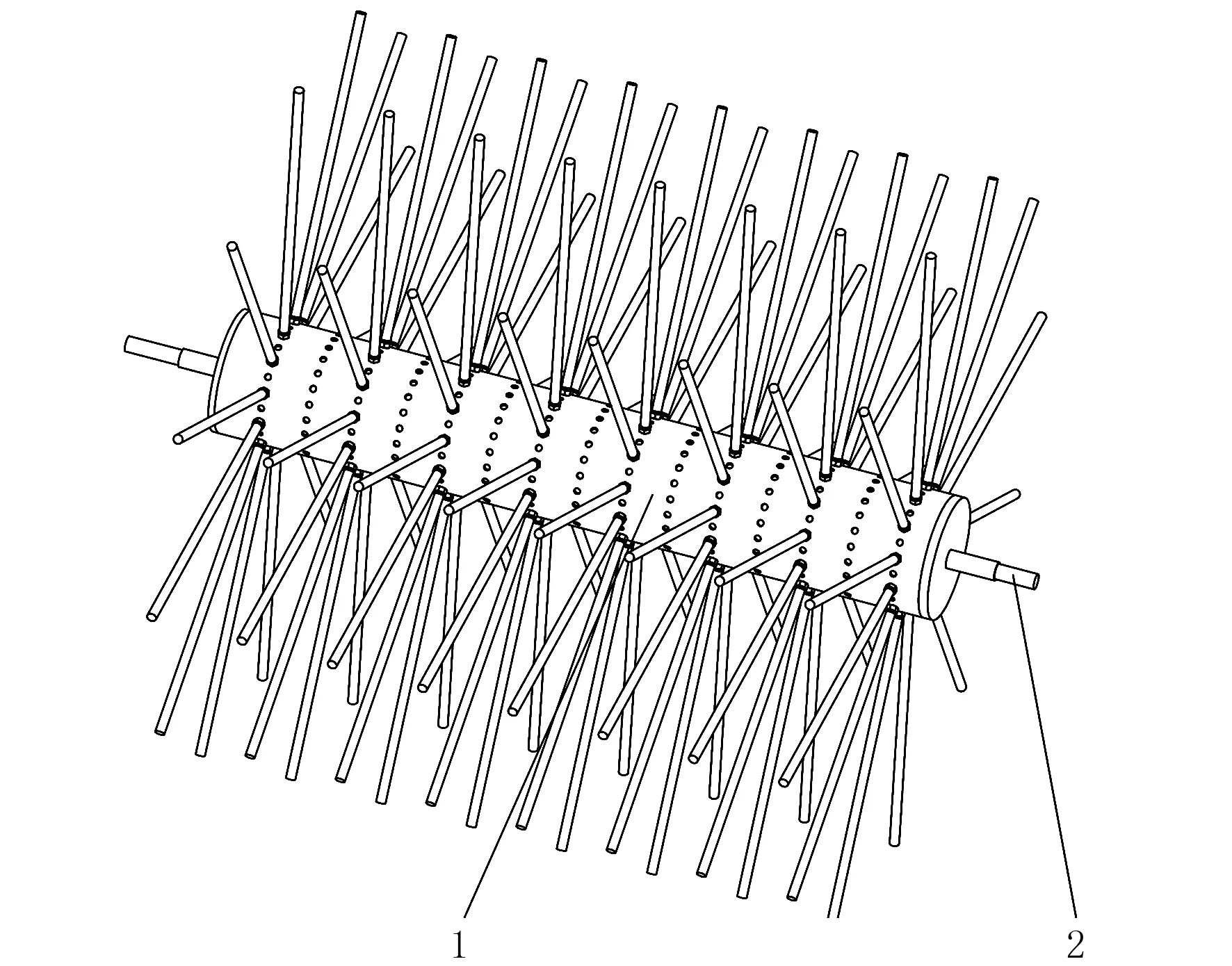
(a)
(b)
2.1.2 弹性元件的设计
弹性元件是激振装置的主要执行部件,一端与机架相连,一端安装于拨杆滚筒立轴。激振装置转动产生弹性恢复力,主要用于提供拨杆滚筒在自激振动过程中的初始激振力(自激振动系统自身能源),其结构特点和强度直接影响红枣采收的损伤率和采净率。弹性元件的最大弯曲应力、强度及刚度应满足下述条件[9],即
式中W—弹性元件的抗弯截面系数;
d—弹性元件截面直径;
K1—弹性元件的曲度系数;
[σb]—弹性元件的许用弯曲应力。
式中Kt—弹性元件的扭转刚度;
I—弹性元件截面的轴惯性矩;
E—弹性元件材料的弹性模量。
经计算,弹性元件材料为碳素弹簧钢丝,弹簧钢丝直径d=3mm,工作圈数n=13,扭转刚度为19.6N·mm/(°),一端与机架相连,另一端通过打孔与拨杆滚筒的桶身连接。
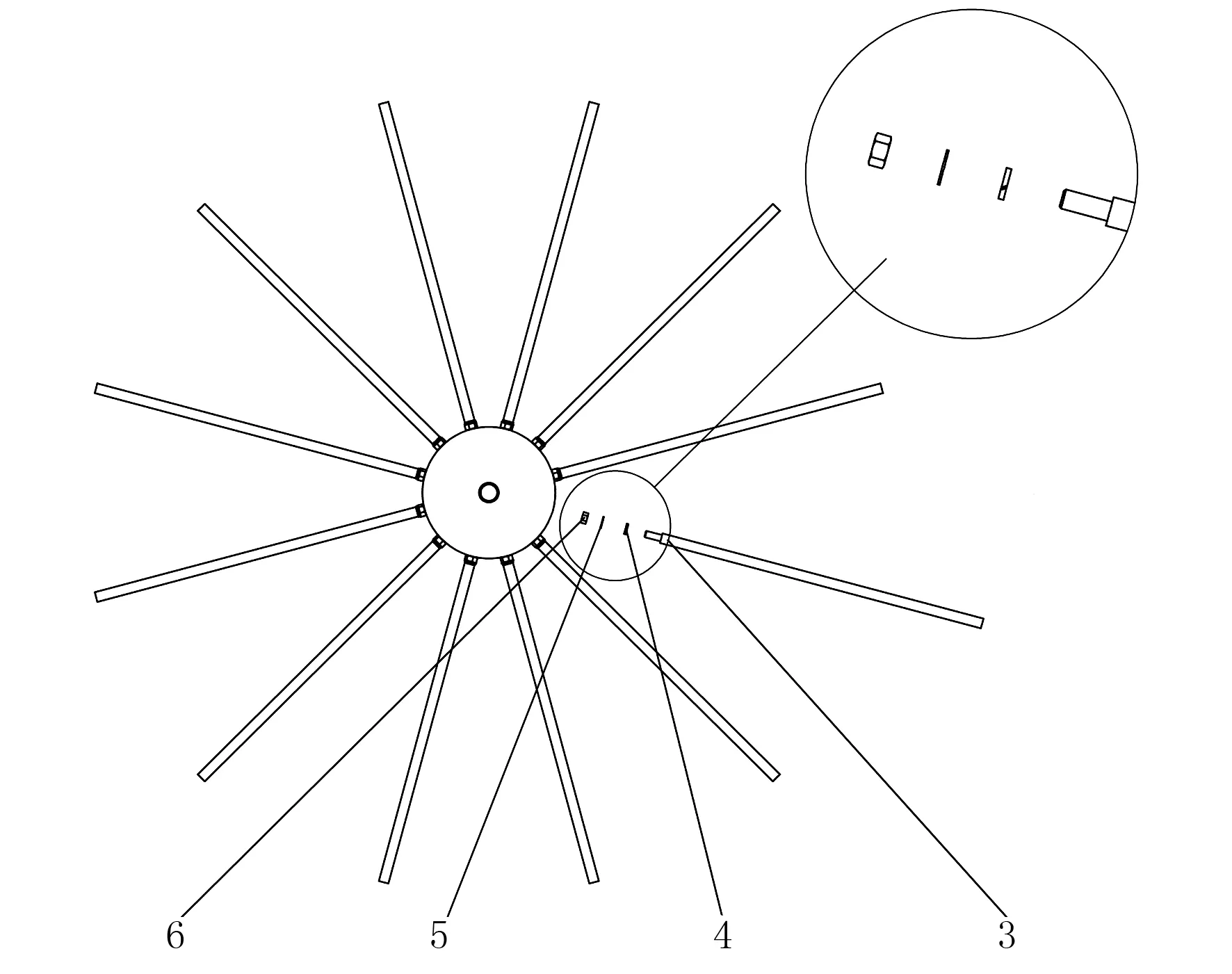
2.2 夹持装置
电动小车上安装有一个夹持装置,主要用于固定枣树,以防止枣树在振动过程中发生倾倒或偏移。夹持装置主要由固定板、手轮、螺纹杆及夹板等组成,如图3所示。

1.螺纹杆 2.夹板 3.壳体 4.手轮 5.固定板
固定板上均布9×9个直径为10mm的螺纹孔,利用螺栓固定于电动小车上。壳体是夹持装置的支撑部分,对枣树及由螺纹杆和夹块组成的主要夹持部件起到支撑的作用,壳体上均布4个直径为15mm的螺纹孔,螺纹杆通过螺纹孔固定于壳体上。螺纹孔一端焊接手轮,一端安装于夹板上的滑槽内。试验时,将枣树置于4个夹板之间,通过转动手轮调节夹板之间的间距,以适应不同树径的紧固需求。
3 电控系统设计
电控系统主要由系统硬件和系统软件两部分组成。系统硬件主要由角度传感器、扭矩传感器、伺服电机、驱动器以及PLC等组成,系统硬件配置如表1所示。扭矩传感器和角度传感器均通过联轴器与拨杆滚筒轴端同轴连接,伺服电机与驱动器连接通过支架固定在机架上,并且通过联轴器连接在扭矩传感器下方。

表1 控制系统硬件配置表
PLC是控制系统的核心部分,主要进行数据的采集与运算,程序流程如图4 所示。控制系统输入信号4个,模拟量1个,数字量3个;输出信号1个,模拟量1个,数字量0个。输入部分由启动/停止开关、角度传感器及扭矩传感器组成,完成试验台启停控制及拨杆滚筒在采收过程中转动角度,以及滚筒立轴所受扭矩的检测。输出部分由伺服电机及驱动器组成,主要完成在自激振动过程中拨杆滚筒所受弹性元件的回复力不足时激振力的补偿。
4 激振装置运动分析
4.1 拨杆滚筒运动分析
4.1.1 模型建立
拨杆滚筒的拨杆在弹性元件的回复力作用下做回转运动击打枣枝,对拨杆滚筒进行运动分析,探寻拨杆滚筒振幅与相位差的影响因素,为后续力补偿控制系统的调试及研究提供理论依据。根据系统简化力学模型,将模型简化为单自由度扭振系统,拨杆滚筒振动动力学模型如图5所示。
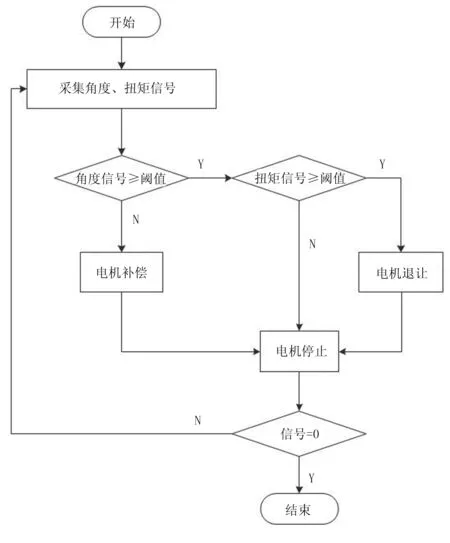
图4 PLC控制程序流程图

图5 拨杆滚筒运动受力示意图
拨杆转动惯量为[10]
(1)
滚筒转动惯量为[11]

(2)
拨杆与滚筒总的转动惯量为

(3)
系统的弹簧刚度为
(4)
根据图5,应用牛顿第二定律,可得
(5)
代入式(3)、式(4),可得系统运动微分方程为
(6)
式中m1—拨杆的质量;
m2—滚筒的质量;
L—拨杆的长度;
d—滚筒的直径;
θ—拨杆的转动角度/弹性元件的扭转角。
4.1.2 模型求解与分析
式(5)的特征方程为
J0r2+kt=0
(7)
扭振系统的固有角频率为[10]
(8)
所以式(6)的通解为
θt=A1cosωnt+A2sinωnt
(9)
拨杆滚筒初始扭转角度为θ0,即
(10)
由式(9)和式(10)联立可得
(11)
则方程(6)特解为
(12)
(13)
将式(13)带入式(12)可得
θ(t)=Asin(ωnt+φ)
(14)
其中,由式(15)和式(8)化简可以得到拨杆滚筒的振幅A和相位差φ为
(15)
由式(14)可知:拨杆滚筒在不受外力情况下扭转角度θ呈周期性变化,周期为2π/ωn。其中,ωn为系统的固有频率,由系统本身物理参数决定。由式(17)可知:激振装置的振幅A与相位差φ也取决于系统本身的物理参数(拨杆的质量m1与长度l,滚筒的质量m2与直径d,弹性元件的扭转刚度k及拨杆滚筒初始扭转角度θ0)。
4.2 拨杆滚筒力补偿角度阈值计算
取滚筒、拨杆和扭簧组成质点系,将拨杆作为一个质点,代入式(3),得到拨杆滚筒动量矩为
(16)
当滚筒扭转角为θ时,扭簧产生的力矩为
M(e)=Ktθ
(17)
由动量矩定理可得
L0=M(e)
(18)
代入式(18)和式(19),整理可得
(19)
通过矮化密植红枣物料机械物理特性试验研究可知:骏枣从白熟期到完熟期的果柄拉断力完为8~6N左右,灰枣从白熟期到完熟期的果柄拉断力完为5~3N左右[12]。为使枣树上的红枣在激振过程中完全脱落,取最大果柄拉断力8N为临界拉断力,代入式(19)可得到
(20)
化简可得关于扭转角度θ的不等式为
(21)
其中,m1为拨杆的质量;m2为滚筒的质量;l为拨杆长度;d为滚筒直径。根据式(4),kt=k/2,k为弹性元件扭转刚度,将m1=0.025kg、m2=30kg、l=530mm、d=200mm、kt=9.8N·mm/(°)代入式(21)可得:θ≥19.4,即激振装置扭转角度阈值为19.4°。当扭转角度小于19.4°时,则需要力补偿系统进行激振力的补偿以达到采收效果,反之则不需要进行力补偿。
5 结论
1)针对红枣收获过程中劳动强度大、收获效率低且易造成果枝和果品的损伤等问题,结合自激振动与力补偿理论,设计了一种基于自激振动力补偿的红枣采收试验装置。
2)通过田间调研与理论计算,确定了试验装置的主要部件的结构参数,并根据力补偿控制系统的要求设计了电控系统。
3)对激振装置主要运动部件的运动过程进行了理论分析,获得了拨杆滚筒的运动学方程并分析了拨杆滚筒振幅与相位差主要影响因素,为红枣采收试验装置的试验研究提供了理论基础。
4)为达到采收效果并满足自激振动的要求,计算了拨杆滚筒需要进行激振力补偿时的扭转角度阈值,当扭转角度小于19.4°时需要力补偿控制系统进行补偿,反之则不需要补偿。
[1] 付威,何荣,曲金丽,等.自走式矮化密植红枣收获机的设计[J].农机化研究,2014,36(4):106-109.
[2] 俞言琳,杨杰,赵妤.谁捧“火”了新疆红枣[J].中国林业,2010(1):12-15.
[3] 郭晓成,李倩娥.枣树栽培新技术[M].杨凌:西北农林科技大学出版社,2005:8-10.
[4] 新疆维吾尔自治区统计局.新疆统计年鉴[M].北京:中国统计出版社,2015.
[5] SandersK F.Orange harvesting systems review[J].Biosystems Engineering,2005,90(2):115-125.
[6] Lee S W.Mechanical Jujube (Zizyphus Jujuba Miller)Harvester[C]//CSAE/SCGR 2003 Meeting.Montréal:The Canadian Society for Engineering in Agricultural,Food and Biological Systems,2003:6-9.
[7] 汤智辉,孟祥金,沈从举,等.机械振动式林果采收机的设计与试验研究[J].农机化研究,2010,32(8):65-69.
[8] 何荣,坎杂,付威,等.矮化密植红枣收获机激振装置设计与运动分析[J].农机化研究,2014,36(2):64-67.
[9] 孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[10] 哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2002.
[11] Singiresu S.Rao.机械振动[M].李欣业,张明路,译.北京:清华大学出版社,2009.
[12] 杨红英.矮化密植红枣采收装置采收部件的设计及试验研究[D].石河子:石河子大学,2013.Abstract ID:1003-188X(2017)10-0018-EA
Design of Jujube Harvest Test Device Based on Self-excited Vibration and Force Compensation
Cui Jian1,2, Zhang Huiming1,2, Fu Wei1,2, Kan Za1,2, Liu Yudong1,2
(1.College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832003, China; 2.Agricultural Machinery Key Laboratory of Xinjiang Production and Construction Corps, Shihezi 832003,China)
In order to improve the vibration recovery effect and reduce the damage of jujube trees and jujubes,a way combined self-excited vibration theory and force compensation theory was presented, and the jujube harvest test device based on self-excited vibration and force compensation was designed for poor harvest effect and high damage rate in the traditional operation process with crown forced vibration. This paper introduces the structure and working principle of the test device, and designed the key working parts. The kinematic equation of deflector rod roller was obtained by theoretical analyze the motion process of vibration device’s main moving parts, and the threshold of torsion angle when deflector rod roller need force compensation was 19.4°, and the expression of response amplitude was derived and the main influencing factors on amplitude were analyzed to provide a theoretical basis for experimental study of jujube harvest test device.
jujube; harvest; self-excited vibration; force compensation
2016-07-27
国家自然科学基金项目(51365049);石河子大学高层次人才科研启动项目 (RCZX201510)
崔 健(1976-),男,新疆石河子人,硕士,(E-mail)18509935524@163.com。
付 威(1977-),男,黑龙江五常人,副教授,硕士生导师,博士,(E-mail)fuwei001@126.com。
S225.93
A
1003-188X(2017)10-0018-05