新型具有力感知的柔性果蔬采摘机械手研究
2017-12-16肖英奎李永强付英达
肖英奎,李永强,谢 龙,付英达
(吉林大学 生物与农业工程学院工程仿生教育部重点实验室,长春 130022)
新型具有力感知的柔性果蔬采摘机械手研究
肖英奎,李永强,谢 龙,付英达
研发了基于设施农业的果蔬采摘机械手,包括具有3个旋转关节自由度的采摘机械臂及具有力反馈功能的三指果蔬采摘末端执行器,并对其控制系统进行了开发。通过采摘模拟试验,验证了其作业性能、采摘效果。试验结果表明:采摘机械手各关节与控制系统配合良好,运行稳定;采摘末端执行器手指控制灵活,传感器响应灵敏,能够实现稳定抓取并不损伤果实,具有推广价值。
果蔬采摘;机械手;柔性抓取;力觉
0 引言
随着信息网络技术、机器人技术的不断发展,农业机器人的研究也取得了很多成果[1-2]。现已开发出来的农业机器人有喷药机器人、水果采摘机器人、果实分拣机器人及蔬菜嫁接机器人等[3-5]。
多样化、精确化、规模化的农业生产是现今的主要发展趋势[6-7]。由于果蔬的采摘、收获、嫁接及农药的喷洒等农业作业以往基本都是由农民手动完成的,存在自动化程度低、效率不高、劳动量大等问题,而具有智能化、自动化的农业机器人可在一定程度上解决以上问题[8-10]。从长远看,农业机器人具备了比人工劳动力更高的经济性,具有重要的研究意义[11-12]。
1 采摘机械手结构与特点
1.1 采摘机械手整体结构
从采摘过程看,要实现采摘动作灵活,关节机械手是最有效的结构。所设计的采摘机械手主要由末端执行器、大臂、小臂、腰部及基座构成,具有3个自由度。3个主动旋转关节包括腰关节、肩关节及肘关节,如图1所示。为了满足关节结构紧凑、承载能力强的要求,采摘机械手采用谐波齿轮作为传动机构,所设计的三自由度采摘机械手所使用的是 XB1 单级谐波齿轮,内径为85mm,柔轮直径为61mm,速比范围在80~160。由于本文采摘机械手采用刚轮作为输出件,波发生器作为输入件,所以传动比为80。
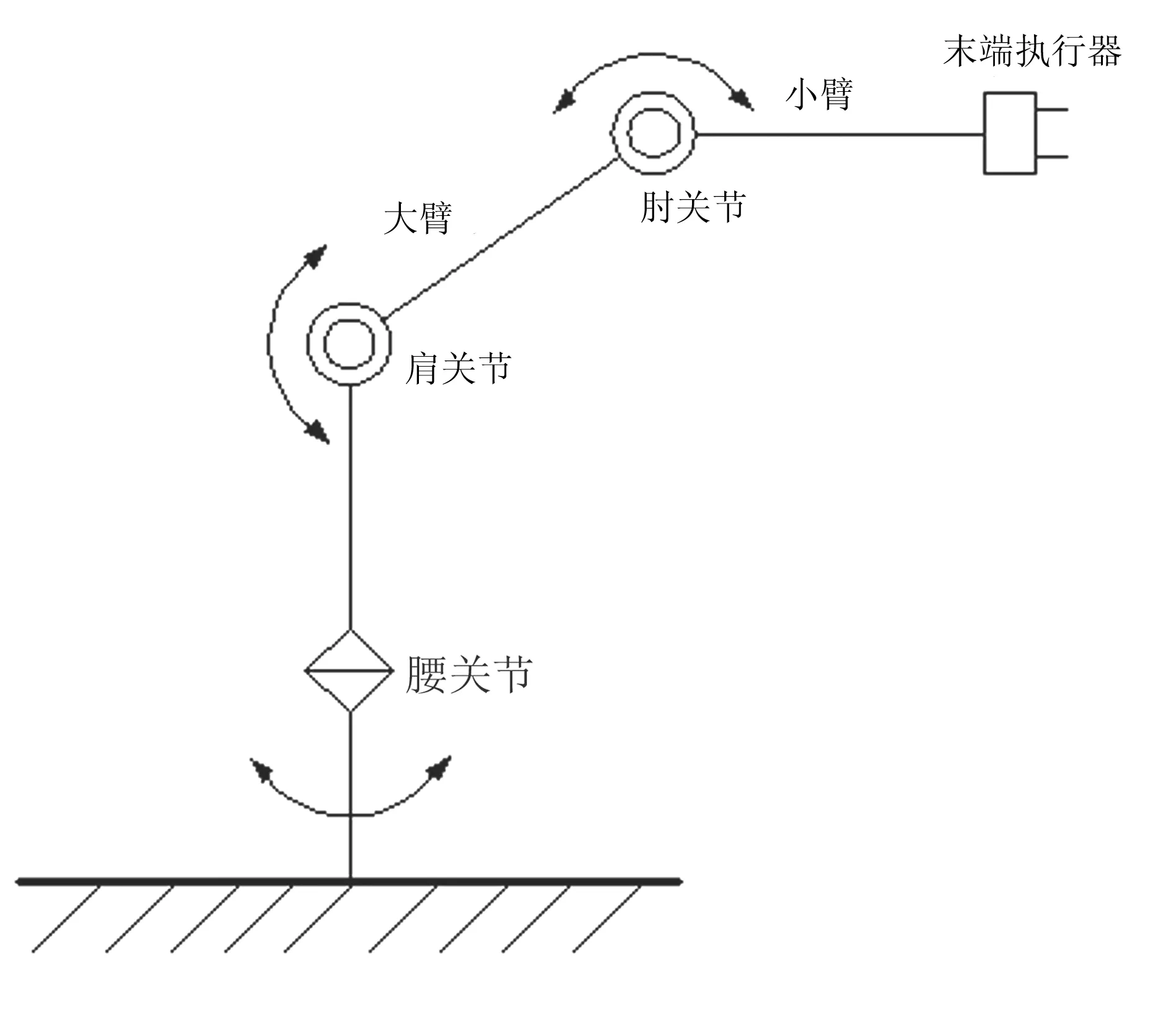
图1 采摘机械手整体结构示意图
1.2 末端执行器结构
末端执行器由两个柔性手指、压力传感器、拱形滑道、传动齿轮组、数字电机、电机驱动模块及外壳构成,如图2所示。使用5线4相数字电机作为末端执行器柔性手指的驱动器。两个较小齿轮中,一个为主动轮,另一个为从动轮;两个较大的从动齿轮通过连杆及手指基座分别与两个柔性手指连接;步进电机输出动力通过齿轮组传动机构传送到柔性手指,柔性手指沿着拱形滑道进行开合动作。柔性手指包括手指骨架和橡胶指面:手指骨架为弹性钢片,起到支撑作用;橡胶指面由耐磨并且防老化的橡胶材料制成,指面上刻有仿人手手指指纹纹路。柔性手指中,一个柔性手指由较宽的橡胶指面和手指骨架组成,另一个柔性手指由2 个较窄的橡胶指面和U 字形手指骨架组成,形成两个分指,如图3所示。这样可减少用于驱动手指的电机数量,简化了结构又可保持三指抓取的稳定性。在柔性手指中添加有传感器[11],可实现抓取的智能化控制,使手指具有力觉反馈。
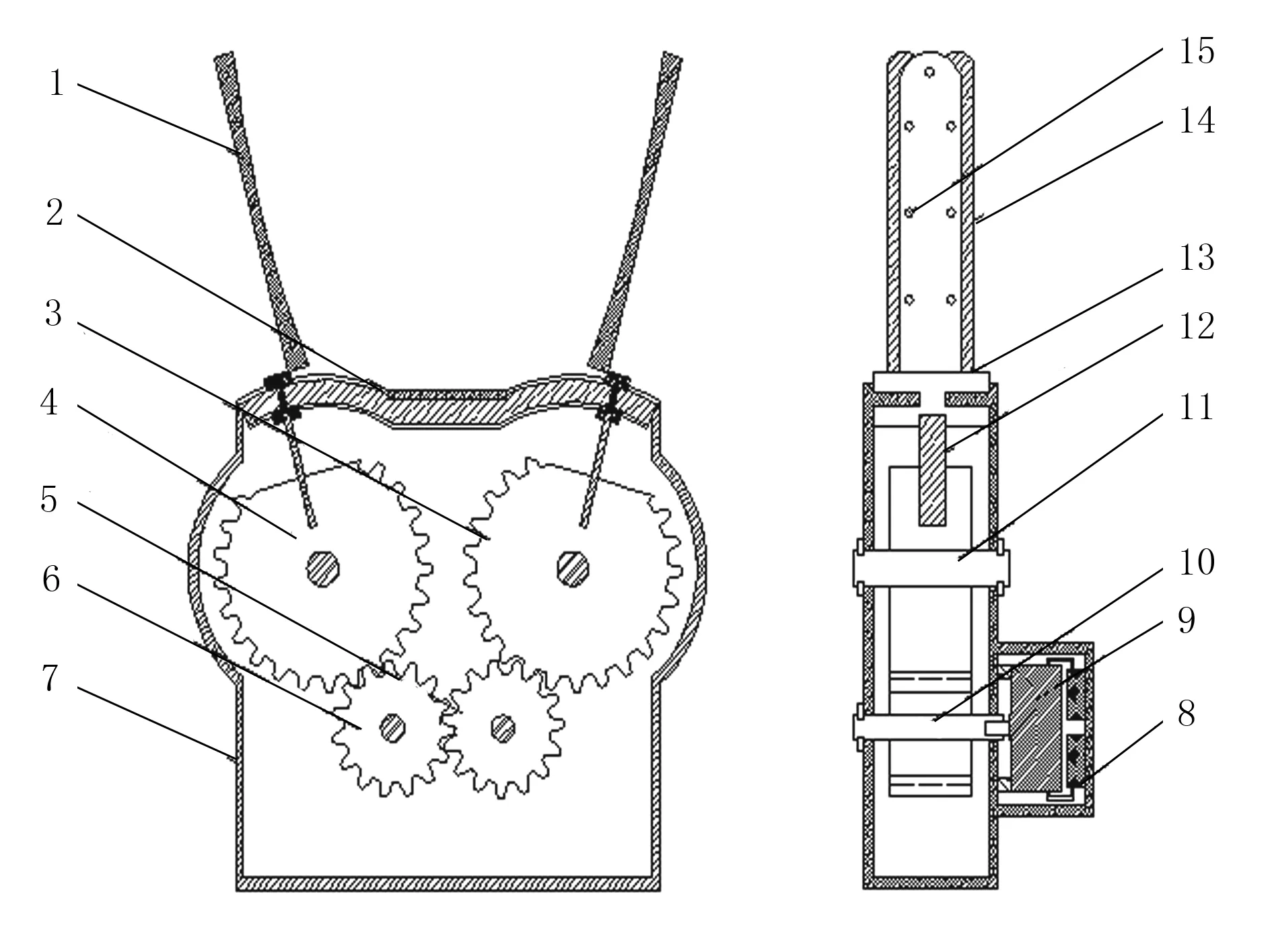
1.柔性宽指 2.双拱形滑道 3.从动齿轮a 4.从动齿轮b
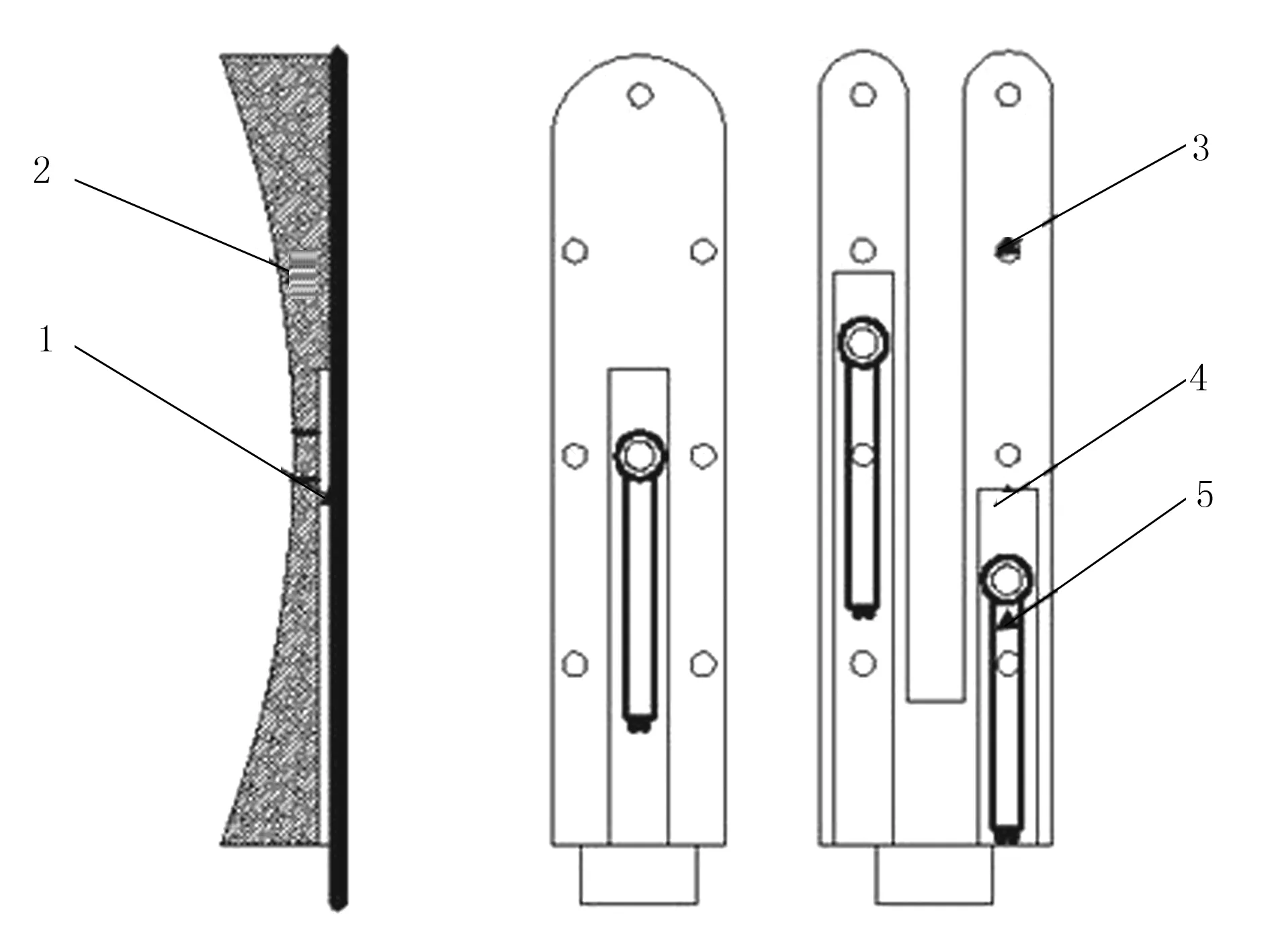
1.弹性钢片 2.橡胶制面 3.螺孔
2 控制系统
2.1 控制系统硬件
采摘机械手控制系统采用模块化设计,主要包括运动控制模块、电源模块、通信模块及传感器电路模块,采用PC机+运动控制卡的控制模式来控制机械臂各关节驱动器(交流伺服电机)。运动控制卡通过工控机中的PCI插口连接到工控机主板上,通过62芯的输入输出端子排将运动控制卡的管脚和交流伺服电机的驱动器进行连接,利用PCI总线实现工控机与运动控制卡的通讯;采用上位机(PC机)+下位机(单片机)的模式来控制末端执行器柔性手指的抓取与释放动作。采摘机械手控制系统硬件整体结构如图4所示。
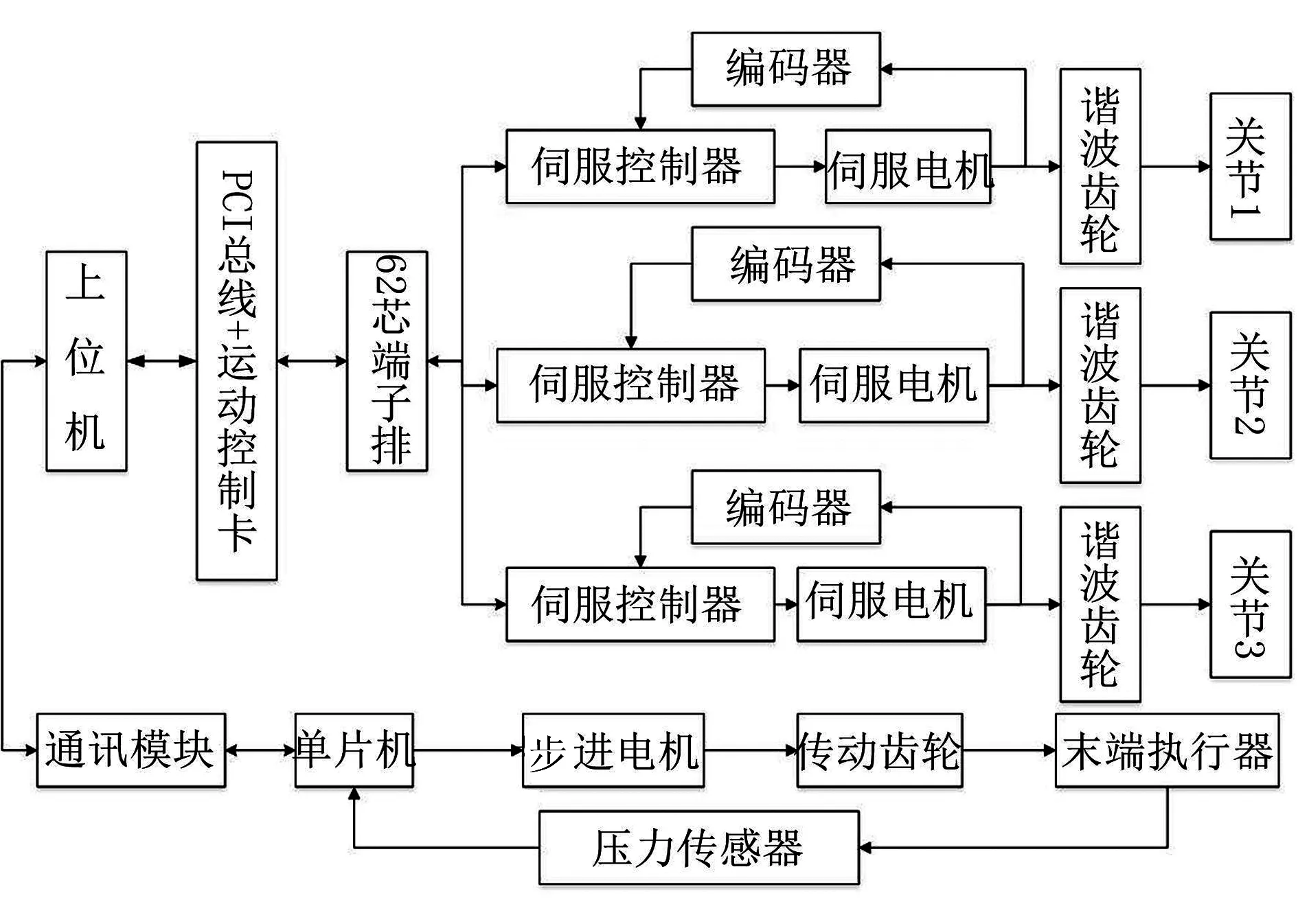
图4 控制系统硬件结构图
末端执行器的控制系统由上位机(工控机)、串口通讯模块、下位机(单片机)、数字电机及电机驱动器、压力传感器及相应信号处理模块(信号放大模块、AD转换模块)组成,如图5所示。
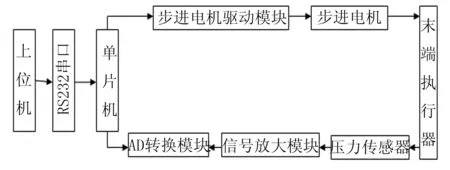
图5 末端执行器控制子系统
2.2 3自由度采摘机械手功能
由于该采摘机械手的手部依据仿生功能的理念,指面采用了橡胶材料,其表面上设计类似于指纹的纹路,因而其表面可提高摩擦附着性能,抓取目标物体时更加稳固;同时,其伺服系统可以很好地控制机械手抓取力度,降低对物体的机械损伤,可以实现不同形状、大小物体的自适应抓取。
在执行抓取目标物体过程中,该3自由度采摘机械手装置的运行步骤大致可分为以下几步:首先,通过人机交互功能,设定目标物体的三维位置信息,主控器(上位机)依据三维位置信息控制其腰部关节、大臂关节和小臂关节的联动,来完成对目标物体定位;到达指定目标位置后,主控器向手部控制器发指令,启动抓取目标物体操作,并进行力觉判断。其次,在抓稳目标物体即达到初始设定的力后(该力保证目标物体的无损等),向主控器请求取回目标物体操作。最后,其机械手运动归位后,主控器通知仿生手部释放目标物体,作业完毕。
2.3 采摘试验方案
通过操作界面中输入目标果实位置后,机械臂将末端执行器送至目标位置,上位机通过串口向下位机发送抓取指令,通过力觉反馈信号,控制采摘手指步进电机启停,并向上位机发送返回指令。采摘具体流程如图6所示。
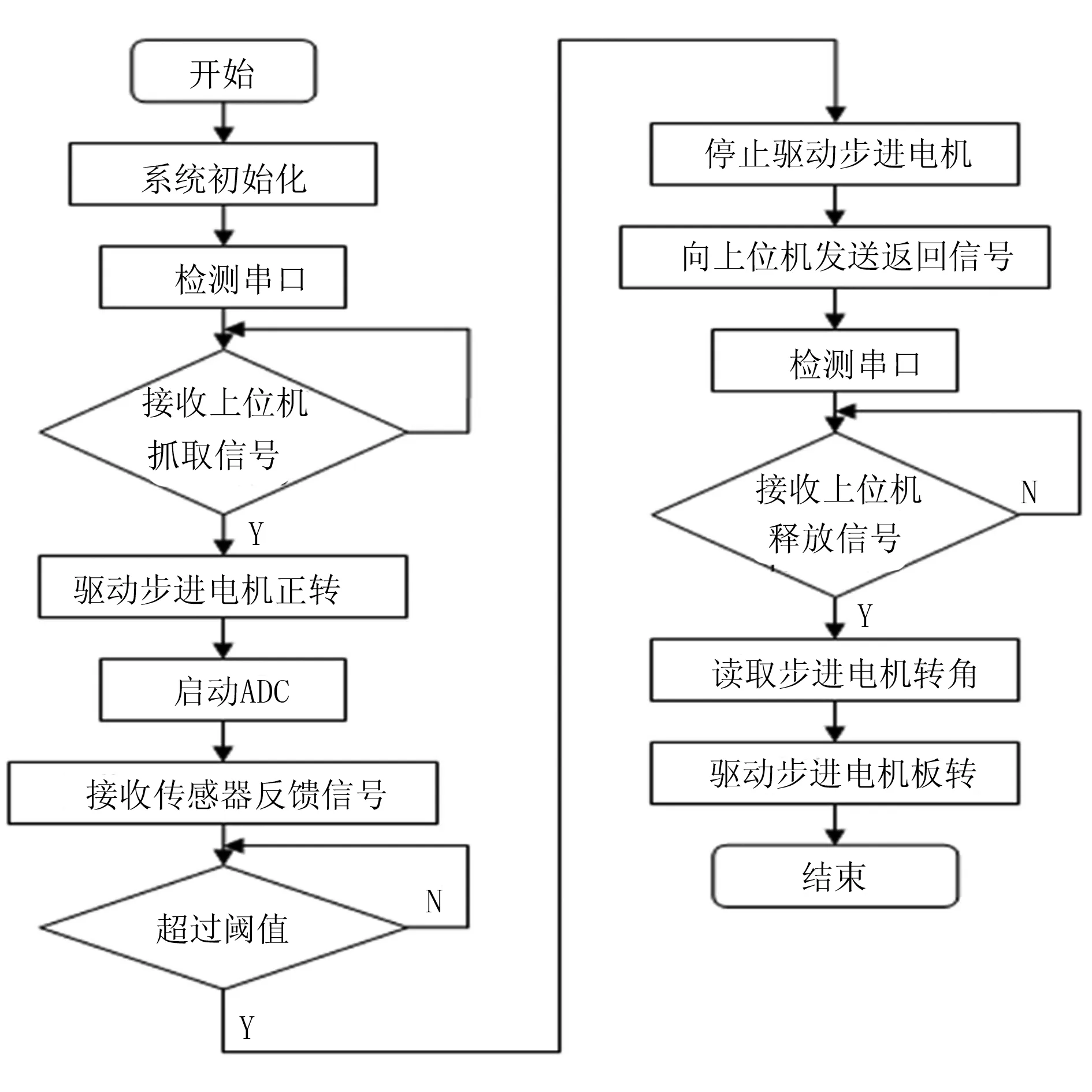
图6 采摘流程图
3 3自由度采摘机械手性能测试
为了验证采摘机械手的有效性及其各方面性能,对其进行模拟采摘试验,主要包括机械手抓取果实时的定位成功率、采摘成功率及采摘平均速度,并对结果进行分析,从原理上验证采摘机械手完成任务的可行性。

图7 采摘试验黄瓜架
试验以黄瓜为采摘对象,将黄瓜果实按照图7方式悬挂于黄瓜架中,通过观察黄瓜果实位置和采摘机械手起始位置,设定采摘机械手的目标位置和最优路径及相应参数,采摘机械手根据程序设定自动完成采摘任务。根据果实位置不同,设定多组参数。采摘机械手分2个试验:试验1测试采摘机械手定位、采摘成功率等方面内容;试验2通过测量采摘机械手的采摘运动时间,来检验采摘机械手的采摘效率。图8为采摘机械手进行模拟采摘试验现场图。

图8 模拟采摘试验
试验1、试验2在采摘的黄瓜架中选取4个不同的位置,进行4组采摘试验。在进行模拟试验时,机械手运动平稳,4组试验中,共计进行了60次采摘试验,试验结果如表1、表2所示。
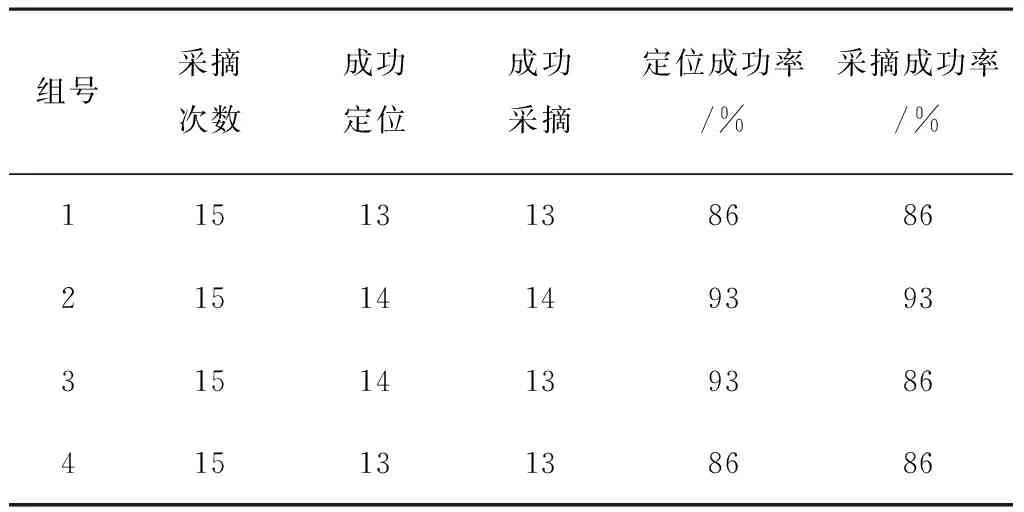
表1 模拟采摘试验结果1
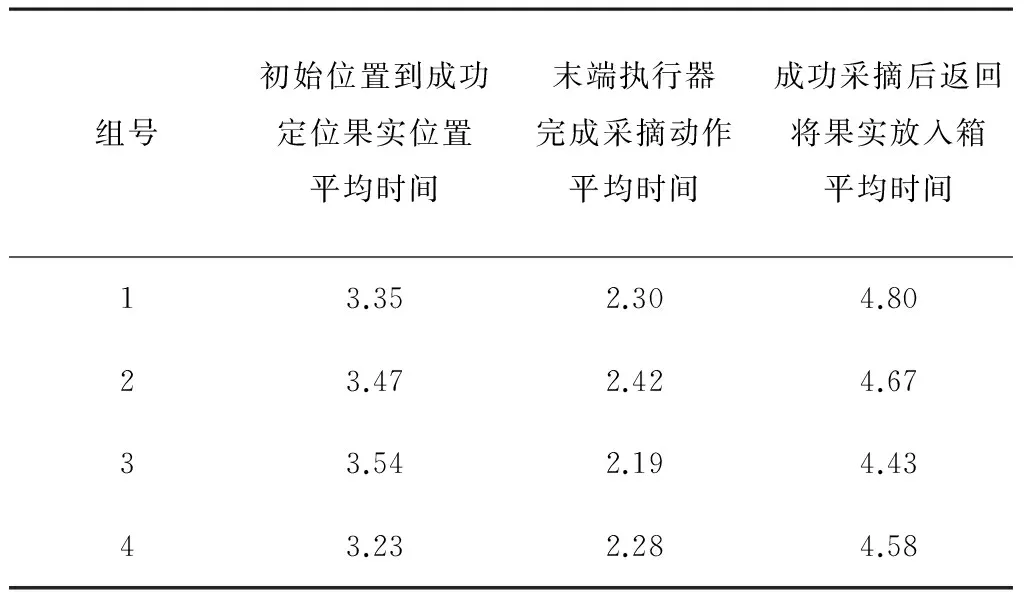
表2 模拟采摘试验结果2
在4组试验中总共进行了60次模拟采摘试验,成功定位54次,成功采摘53次,总定位成功率为90%,总采摘成功率为88%。不能成功定位和采摘的主要原因是:末端执行器手指的抓持范围目前还有限,超出手指抓持半径,果实将不能被成功抓取。
由于4组试验黄瓜位置的不同,与机械手设置的初始位置及收获箱的距离不相同,因此机械手由初始位置运动到目标果实位置的时间及完成整套采摘动作的时间每组都有一定差别,但影响不大。60次采摘试验中,由初始位置到成功定位果实位置平均时间为3.40s,末端执行器完成采摘动作平均时间2.30s,由成功采摘后返回将果实放入箱平均时间为4.62s。从试验结果可以看出:采摘机械手各关节与控制系统配合良好,运行稳定,能够满足采摘要求;下位机对于末端执行器手指控制灵活,传感器响应灵敏,阈值设置合理,能够实现稳定抓取并不损伤果实;在成功采摘以后,并没有发生果实从手指中脱落现象,但采摘手的采摘成功率及采摘速度还有待提高。
4 结论
1)设计了一种具有力反馈功能的三指采摘末端执行器。针对黄瓜果实表皮易受到损伤的特点,选取柔性橡胶材料作为采摘手指指面,在柔性手指中嵌有三套贴片薄膜压力传感器,使采摘手具有力反馈功能,解决了抓取过程中的滑移及脱落问题。结合实验室现有三自由度机械臂,制作出具有三自由度黄瓜采摘机械手样机。在采摘机械手机械结构搭建完成的基础上,设计了控制系统的总体方案。
2)对采摘机械手进行了模拟采摘环境的整机采摘试验,根据果实位置将试验分为4组,并进行重复试验,得到试验数据,验证了采摘机械手采摘作业的可行性,并找出存在的问题和需要改进的部分,为以后开展进一步研究奠定了坚实的基础。
[1] Cox S. Information technology: the global key to precision agriculture and sustainability[J].Computers and Electronics in Agriculture, 2002,36(2):93-111.
[2] Zhang N, Wang M, Wang N. Precision agriculture—a worldwide overview[J]. Computers and Electronics in Agriculture, 2002, 36(2-3):113-132.
[3] 寿华梁.农业采摘机械臂关节伺服控制系统研究[D].杭州:浙江工业大学,2009.
[4] 姬江涛, 郑治华,杜蒙蒙,等.农业机器人的发展现状及趋势[J].农机化研究,2014,36(2): 1-4.
[5] 李国利,姬长英,翟力欣.果蔬采摘机器人末端执行器研究进展与分析[J].中国农机化, 2014(5):231-236.
[6] Shiigi Tomowo,Kondo N,Kunta Mitsutaka,et al.Strawberry harvesting robot for fruits grown on table top culture[C]//2008 ASABE Annual International Meeting. Rhode Island:American Society of Agricultural and Biological Engineers(ASABE), 2008.
[7] 李文婷, 刘昌权, 王志胜.伺服分度装置的控制系统设计与实现[J].机械与电子, 2012(3): 58-61.
[8] 丁辉, 陈晓林.基于PLC三轴伺服控制系统的果蔬采摘机械手设计[J].农机化研究, 2016,38(7):182-186.
[9] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农业工程,2013(6):10-13.
[10] 王燕,杨庆华,鲍官军,等.关节型果蔬采摘机械臂优化设计与试验[J].农业机械学报, 2011(7):191-195.
[11] 王儒敬, 孙丙宇. 农业机器人的发展现状及展望[J].中国科学院院刊, 2015(6):803-809.
[12] 张一星. 小型农业机器人试验平台设计与试验[D].杨凌:西北农林科技大学, 2014.
Study on a New Type of Flexible Fruit and Vegetable Picking Manipulator with Force Sensing
Xiao Yingkui, Li Yongqiang, Xie Long, Fu Yingda
(School of Biological and Agricultural EngineeringKey Laboratory of Bionic Engineering,Ministry of Education, Jilin University , Changchun 130022,China)
This paper developed a manipulator of fruits and vegetables picking based on agricultural facilities, including 3-DOF picking manipulator with rotational joint structure and, three finger picking end actuator with force feedback function. The control system of picking manipulator is developed. The performance of the operation and picking results were verified by the simulation experiment. Experimental results show that each joint movement state of the picking manipulator is good and the response of the picking manipulator is rapid and the control system of the picking manipulator is stable operation and picking end actuator controls flexibly and the sensor response is sensitive and picking end actuator is able to grasp stably not to damage the fruit.The picking manipulator has the value of popularization.
fruit and vegetable picking;manipulator; flexible grasping; force sense
2016-08-14
吉林省教育厅高校科研课题(20141028)
肖英奎(1965-),男,长春人,教授,(E-mail)xiaoyk@jlu.edu.cn。
S225.92;TP202
A
1003-188X(2017)10-0133-04
