大蒜芽端筛选及直立种植方案探究
2017-12-16魏玉珍邹栋林刘勇兰喜冠南
魏玉珍,邹栋林,刘勇兰,喜冠南
(1.南通大学 机械工程学院,江苏 南通 226019;2.南通科技职业学院 机电工程系, 江苏 南通 226007)
大蒜芽端筛选及直立种植方案探究
魏玉珍1,邹栋林2,刘勇兰2,喜冠南1
(1.南通大学 机械工程学院,江苏 南通 226019;2.南通科技职业学院 机电工程系, 江苏 南通 226007)
我国作为世界大蒜主要生产国,目前的种植方式以人工为主,大蒜种植业机械化发展缓慢。随着对大蒜种植技术的深入研究,芽端朝上的直立种植方式逐渐成为必要的农艺要求。为保证大蒜的品相质量并提高种植效率,针对如何实现大蒜芽端方向筛选和保证种植的直立度,通过对大蒜的繁殖方式、种植农艺及外形几何等方面进行分析,提出了一种芽端方向筛选方案和3种不同的直立种植方案,并展开装置设计、方案优劣分析及可行性验证,旨在为我国大蒜播种机的优化提供参考。
大蒜;直立筛选;特征分析
0 引言
根据对膳食营养的深入研究,大蒜不仅因其独特的辛辣风味成为日常饮食的一种必备佐料,而且具有很高的营养价值和医用价值。大蒜既可提供人体所需元素,改善糖代谢,又可降压降脂、杀菌消毒,且因其富含有机锗而具有强大的抗癌效应,被赞誉为“天然广谱植物抗生素”。目前,大蒜已经成为很多国家的主要农业经济作物,种植面积也逐年增加。在我国,大蒜总产量、出口量及种植面积都居于世界前列[1]。然而,由于大蒜芽端朝上直立种植的特殊农艺要求,大蒜种植业的机械化发展仍存在较大难度。
在国外,大蒜种植的相关专利技术主要集中在韩国和日本,其次是欧美国家。韩国的手扶式大蒜播种机采用转勺式排种器投种,较好地控制了蒜瓣的输送数量和速度,但大蒜的芽端方向筛选准确度、种植直立度均较低。日本的压穴式大蒜播种机采用半球锥压穴,较好地利用球面特点控制大蒜的直立度,但因其随机排种方式使得大蒜芽端方向不可控。捷克的大蒜载种机采用振动抖槽定向器,较好地保证了蒜瓣输送过程中的直立度,但入土后的直立度难以保证。美国的农业种植以规模化、专业化为特点,大蒜播种机集合了开沟、投种、覆土、覆膜等一系列作业,自动化程度高,种植效率高,但大蒜芽端筛选的准确度和直立度很低[2]。
在国内,大蒜种植机械也得到一定发展,典型机型为山东五征集团研制的一款大蒜播种机械,利用锥形播种斗压出播种穴并进行投种,能够初步达到大蒜直立种植的要求,但其直立度受到拖拉机的前进速度等因素的影响较大。然而,目前国内大蒜种植机械化并不成熟,仍然以人工方式分辨芽端、直立插入土中。根据相关大蒜生产调查发现,每户3人1天可种植大蒜的面积仅666.7m2多,雇佣人工每人每天的工资约为150~200元。该方式虽然保证了芽端方向筛选的准确度和种植的直立度,但劳动强度大、种植效率低且大蒜生产的人工成本高[3]。
因此,机械化是我国大蒜种植业发展的必然趋势,而如何保证芽端方向筛选的准确度和种植的直立度是大蒜机械化发展中需要解决的关键问题。本研究针对如何实现大蒜芽端朝上、直立种植的问题展开,基于对大蒜的特征分析,提出一种大蒜芽端方向筛选方案和3种直立种植方案,并进行装置设计,通过各方案的优劣分析,为我国大蒜种植机的优化设计提供参考。
1 大蒜特征分析
1.1 大蒜的繁殖方式
常见的大蒜头实则为鳞茎,蒜瓣为鳞芽,蒜头结构示意图如图1所示。生活中,蒜瓣通常会被误认为大蒜的种子,然而其本身只是一种地下块茎。由于大蒜的花发育不良,产种极少,种子难育且遗传性不稳定,因此通常利用蒜瓣的无性繁殖来种植大蒜,且发育周期短、性状遗传好,有利于提高大蒜的存活率和保证较大产量。
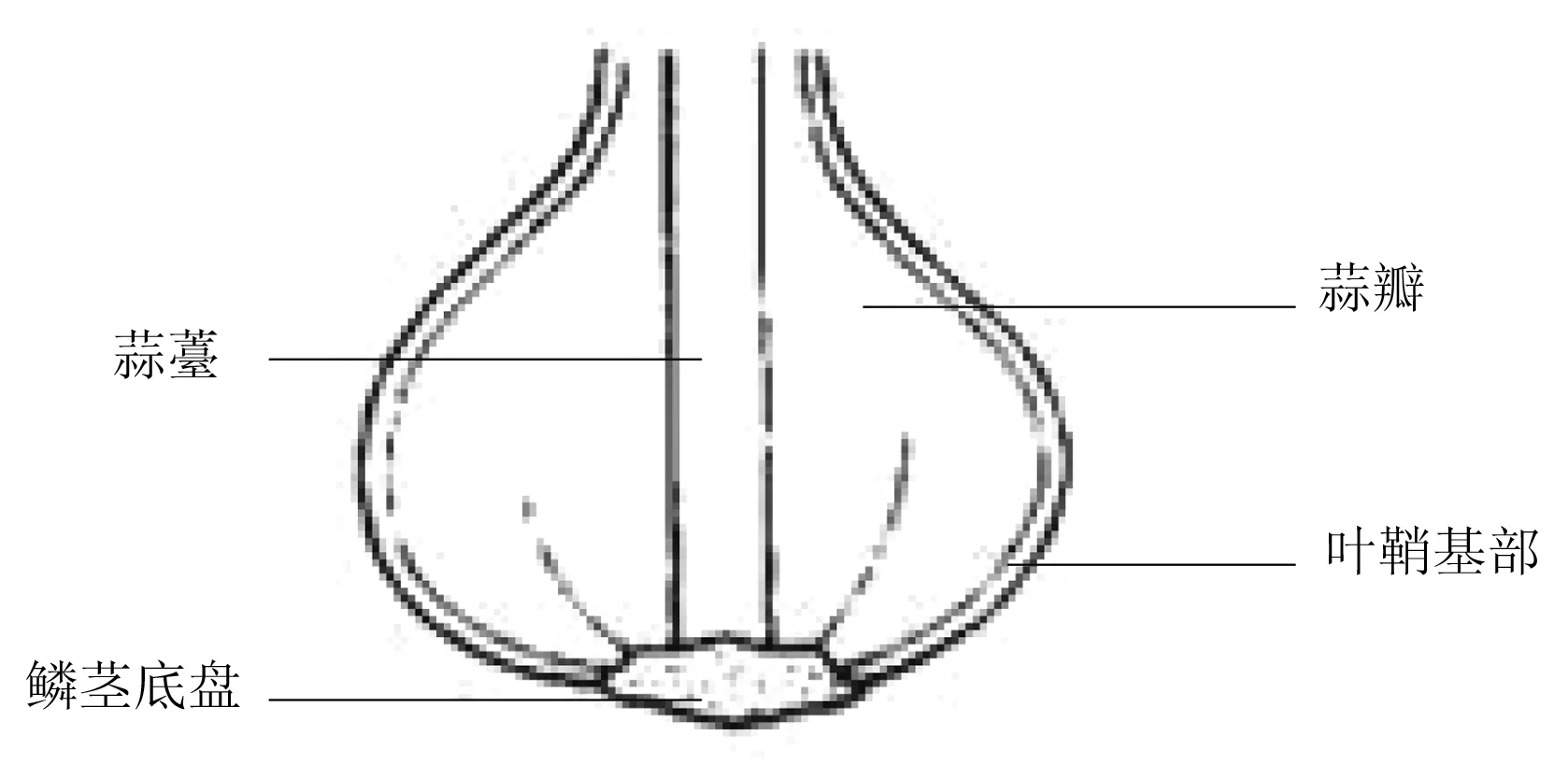
图1 蒜头结构示意图
1.2 大蒜的农艺要求
根据大蒜销售的相关调查得知,大蒜外观的品相对其经济价值影响非常大,尤其对于大蒜出口销售,品相好的大蒜市场价格通常约为品相差的3~4倍。此外,有专家的实验研究表明,直立种植方式带来的大蒜产量约是随机播种的5倍[4-5]。
本研究中取3组白皮大蒜,每10粒为1组,改变条件进行直立种植实验,结果如表1所示。
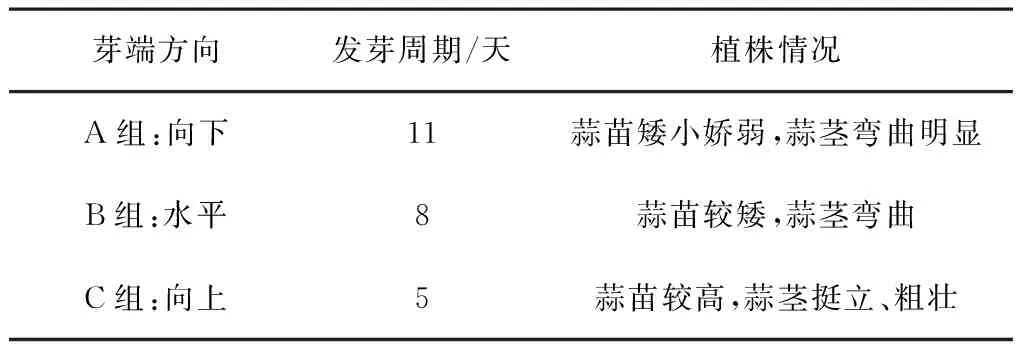
表1 大蒜直立种植实验结果
根据实验结果的统计可得:
1)大蒜芽端向下时,发芽周期长,蒜苗生长缓慢,相比同期的B组和C组,其蒜苗植株矮小娇弱、蒜茎弯曲程度大且明显。
2)大蒜芽端水平放置时,相比同期植株较矮且蒜茎存在弯曲。
3)大蒜芽端向上时,发芽周期短、蒜苗健壮有力、生长速度快,相比同期植株蒜茎直立粗壮。
随着人们对大蒜种植技术的深入研究,芽端朝上、直立种植逐渐成为大蒜种植过程中需要满足的特殊的农艺要求。该方式不仅可缩短发芽周期,且可提高大蒜外观质量,甚至可提高大蒜产量。因此,如何保证该特殊的农艺要求成为大蒜种植机械研制的焦点[6-7]。
1.3 大蒜的几何分析
大蒜头因其根部被修剪而成小圆平面,蒜瓣则围绕着一根圆柱木质化茎盘紧密圆周排列,其品种多样但外形特征大致相同。
通过对大蒜的几何分析可得:
1)蒜瓣外形极其不规则,大致呈现月牙状但芽端与根部差异较小,故可循规律并不明显;
2)蒜瓣大小不一致,尺寸偏差范围较大,对于大蒜种植机械的排种精度影响较大;
3)蒜瓣皮薄易被损伤,粒多易发生堵塞,故对于大蒜种植机械的蒜种输送提出较高要求;
4)通过物理学中不规则物体重心悬挂法测得,蒜瓣处于直立状态时,重心分布靠近根部,如图2所示。
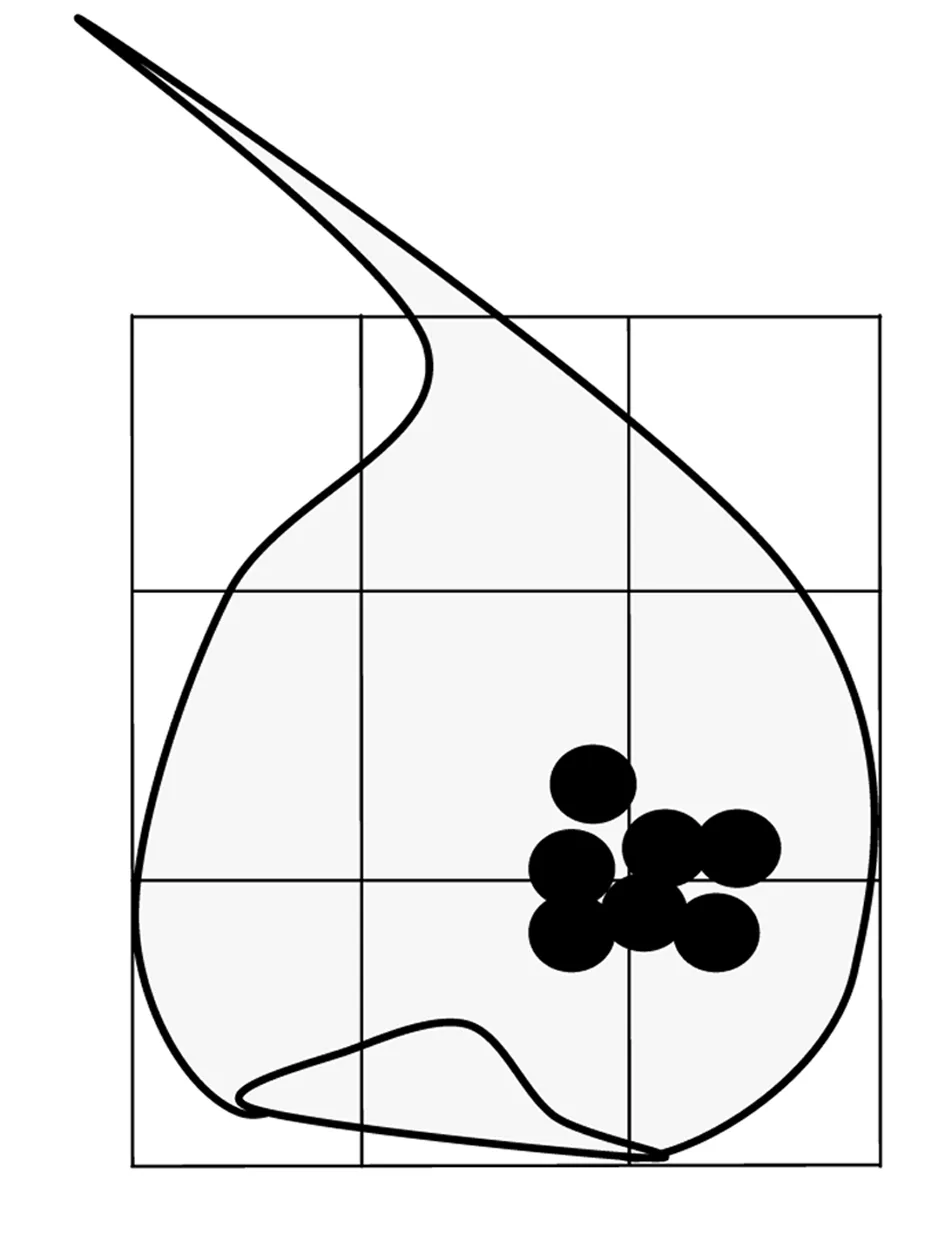
图2 大蒜重心分布图
综上所述,为保证大蒜性状稳定遗传,通常采用蒜瓣进行无性繁殖。为了满足大蒜市场销售的高品相质量需求,芽端朝上、直立种植的特殊农艺引起了广大蒜农的关注,很多专家学者的深入研究也进一步验证了直立种植的合理性,如何保证该农艺要求成为了大蒜种植机械的研究焦点。然而,大蒜外形不规则、皮薄易损伤、粒多易堵塞等问题是直立种植研究的难点,本研究针对这些难点提出了一种芽端方向筛选方案和3种直立种植方案。
2 大蒜芽端方向筛选方案
基于上文对大蒜特征的分析发现,大蒜芽端与根部的差异甚微,纯机械的筛选方法很难保证较高的筛选准确度,因此提出了采用颜色传感器的筛选方法。即在播种前将大蒜根部进行染色处理(染色剂须对大蒜生理活性无影响),通过颜色传感器进行方向区分,从而完成芽端方向筛选。
该方案主要组成部分有取种器、输送管道、筛选器、单粒排种器及主箱体等机构,如图3所示。
工作原理:将染色处理过的大小均匀的蒜瓣放入主箱体中,取种器周期性转动从而将蒜瓣周期性地输送到输送管道中,单粒排种器控制蒜瓣输送速度,使单粒蒜瓣依次进入筛选器中,利用筛选器中的颜色传感器完成大蒜芽端方向的筛选。
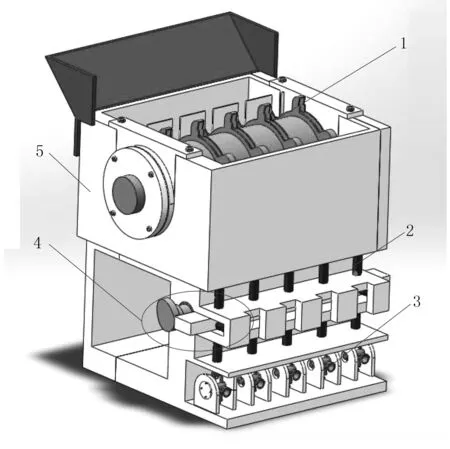
1.取种器 2.输送管道 3.筛选器 4.单粒排种器 5.主箱体
为了实现大蒜的芽端筛选,设计重点如下:
1)图4为取种器。其在大转轴上阵列分布着若干个(可根据实际种植需求设计数量)弯钩状的取蒜钩,取蒜钩的宽度小于蒜长且大于蒜宽,从而保证取种器每转动1周每个取蒜钩只取1粒蒜瓣,较好地解决因蒜瓣数量过多导致输送管道发生堵塞问题。

图4 取种器结构示意图
2)输送管道的直径小于蒜长大于蒜宽,从而使得蒜瓣处于直立状态,便于后期进入筛选器进行筛选;同时,输送管道采用弹簧管,由于其伸缩性强且整个装置在种植过程中存在机械振动,可有效减少输送管道中蒜瓣堵塞现象。
3)图5为单粒排种器。其凸轮转动使得滑块周期性水平运动,当滑块上的孔与输送管道口对接时,蒜瓣进入滑块下方的输送管道中,反之蒜瓣不会进入下方,从而实现阶段性地单粒排种,为下一步筛选工作奠定基础。其中,弹簧的作用是使滑块自动复位。
4)图6为筛选器。其在轴I上阵列分布着若干底部安装颜色传感器的锥形杯,且随着轴I的顺时针转动而转动;当蒜瓣由输送管道进入筛选器的锥形杯时,若根部朝下则颜色传感器识别后发出信号,控制轴II顺时针转动,从而将该类蒜瓣输送到收集管道I中;若根部朝上则颜色传感器识别后发出信号,控制控制轴II逆时针转动,从而将该类蒜瓣输送到收集管道II中;然后,再通过特定的换向装置将收集管道I和II中的芽端方向进行统一,为下一步直立种植工作做准备。
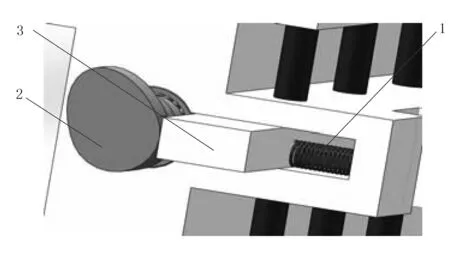
1.弹簧 2.凸轮 3.滑块

1.锥形杯 2.颜色传感器 3.轴I 4.轴II
3 大蒜直立种植方案探究
3.1 方案1
该方案主要由送种机构、隔板导杆、弹簧、压穴转盘、凸轮及压穴模组成,如图7所示。
工作原理:该方案的设计原理是大蒜点播技术。整个机构由拖拉机驱动,压穴转盘4的转动带动其上的压穴模在土壤压出一个个锥形种穴;已经完成芽端筛选的蒜瓣,保持芽端朝上被输送到送种机构中,随后自由落入已经压好的种穴中;隔板导杆随着凸轮的转动进行周期性水平运动,即周期性地阻断送种机构的管道。
为了实现大蒜的直立种植,设计重点如下:
1)为了保证蒜瓣处于直立状态,送种机构的管道直径和压穴模直径同理,以蒜瓣的尺寸为参考设计,大于蒜瓣宽度小于蒜瓣长度。
2)隔板导杆的周期性水平运动是为了保证每次只能有1个蒜瓣落入到种穴中,避免出现一穴多种的情况。
3)蒜瓣从隔板下落到种穴的时间要与拖拉机前进1个株距的时间保持一致,拖拉机前进1个株距时,蒜瓣能够正好落入种穴中。
4)送种机构前段部分采用倾斜设计,目的是减小蒜瓣下落速度,且保证蒜瓣从送种机构倾斜处下落至隔板位置所需时间与隔板导杆水平运动1次的时间一致。
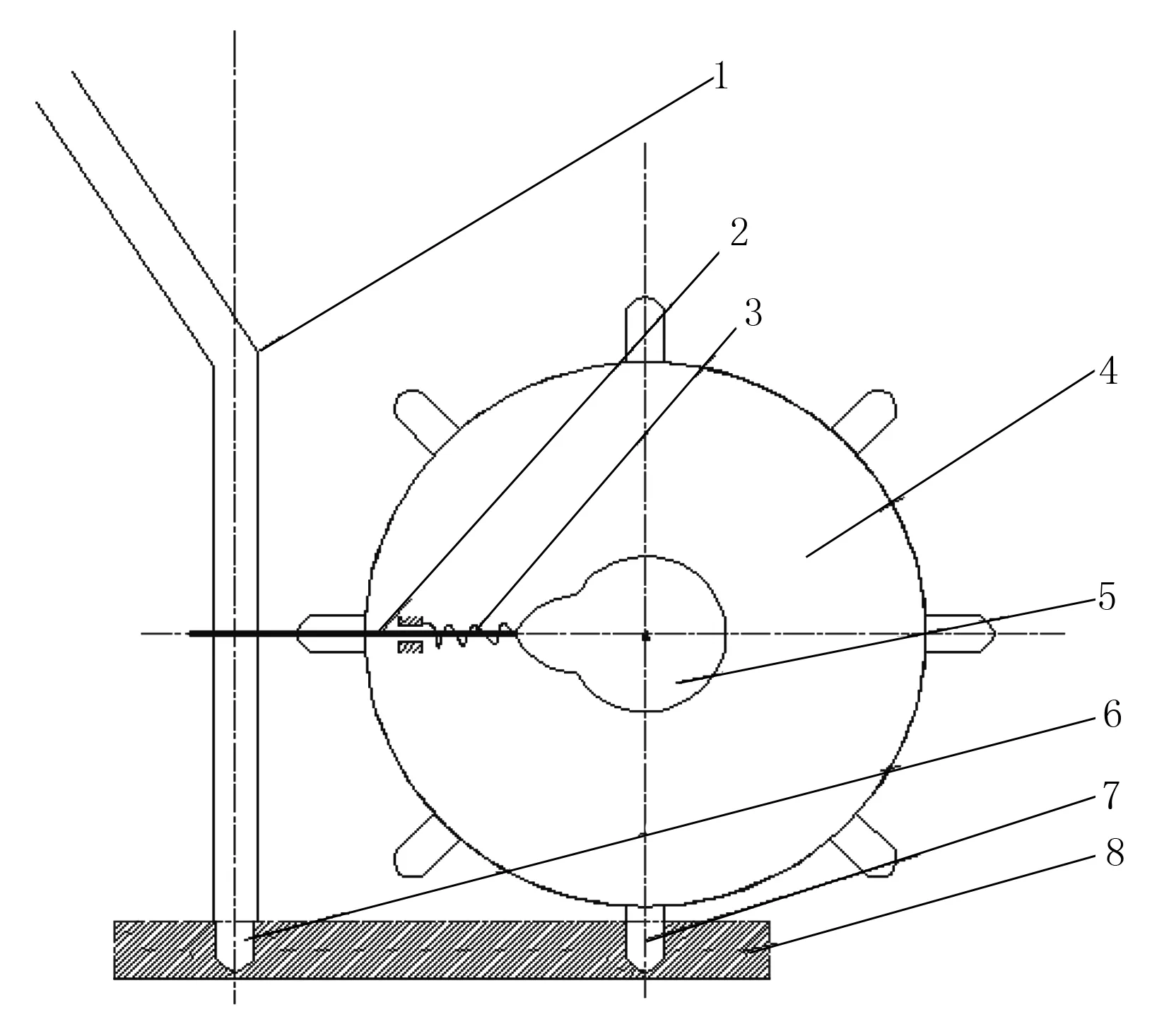
1.送种机构 2.隔板导杆 3.弹簧 4.压穴转盘 5.凸轮 6.种穴 7.压穴模 8.土壤
3.2 方案2
该方案主要组成部分包括气缸、机架、连杆I、播种爪可动件、连杆II、播种爪固定件及导蒜管等机构,如图8所示。

1.气缸 2.机架 3.连杆I 4.播种爪可动件 5.连杆II 6.播种爪固定件 7.导蒜管
工作原理:将已经完成芽端筛选的蒜瓣保持芽端朝上,通过特定的排种器间歇性地输送到导蒜管中。图5所示状态为直立种植机构的常态,在该状态下蒜瓣不能落入种穴中。当气缸1带动连杆I向上运动时,连杆II将逆时针旋转,直至播种爪可动件运动到竖直状态;此时,蒜瓣可以顺利从播种爪中落下,进入到种穴中。
为了实现大蒜的直立种植,设计重点如下:
1)导蒜管固定在机架上,播种爪固定件与导蒜管固定连接,与播种爪可动件铰链相连;而气缸运动带动连杆I、II运动,从而控制播种爪的开闭。
2)通过调整气缸的运动与排种器排出蒜瓣的速度,保证每个种穴中只落入1粒蒜瓣。
3)为保证蒜瓣处于直立状态,导蒜管的直径和由固定件与可动件组成的播种爪直径同方案1,以蒜瓣的尺寸为参考设计,大于蒜瓣宽度小于蒜瓣长度。
4)播种爪的固定件与可动件为圆弧状瓣件且其内壁均附有弹性橡胶垫片,以减小蒜瓣的损伤。
3.3 方案3
该方案主要组成部分包括导蒜管、支架、螺栓I、拨蒜杆、播种爪、主体、压蒜杆、弹簧、螺栓II、滚轮及凸轮等机构,如图9所示。
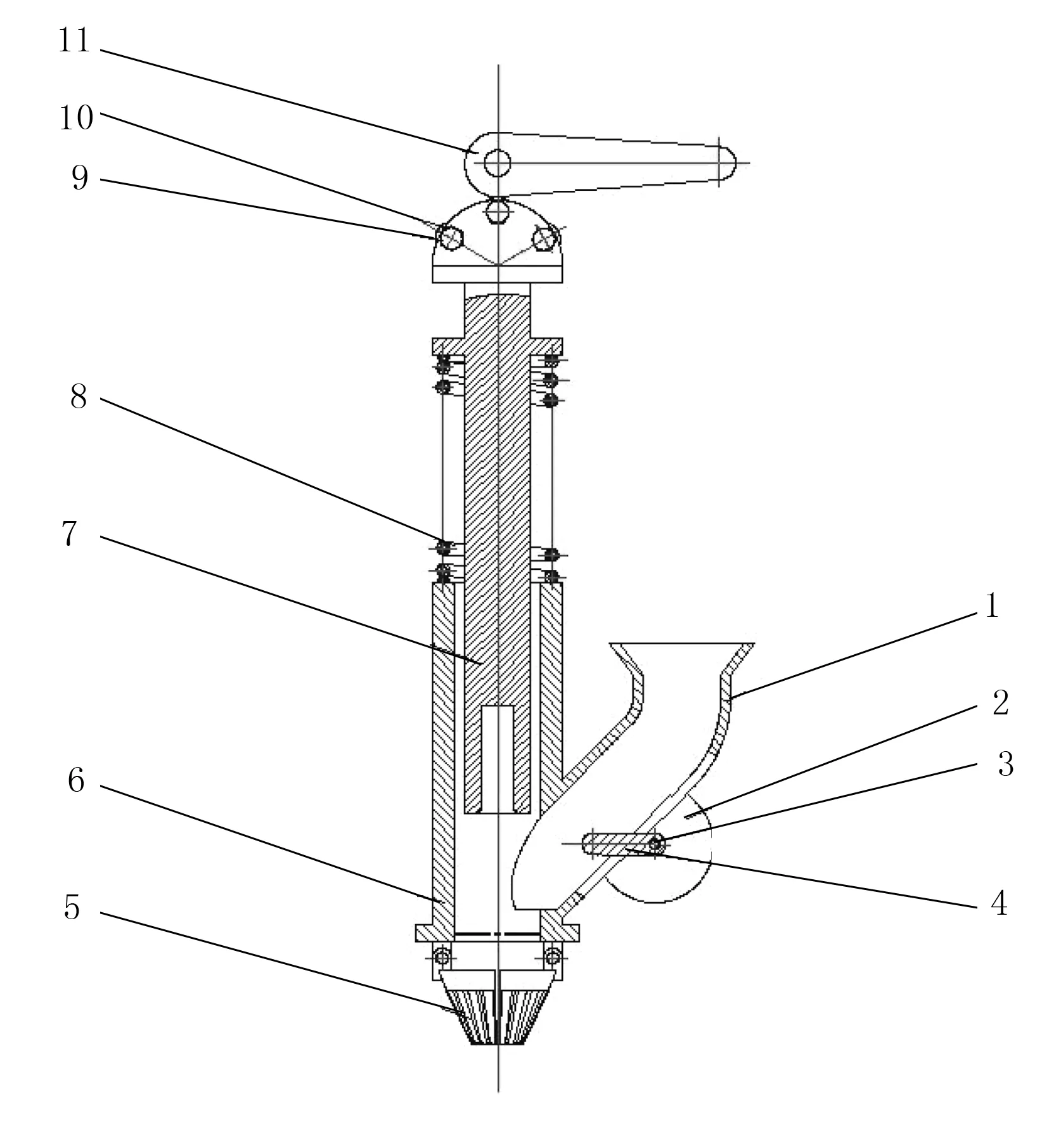
1.导蒜管 2.支架 3.螺栓I 4.拨蒜杆 5.播种爪 6.主体
工作原理:将已经完成芽端筛选的蒜瓣保持芽端朝上,通过特定的排种器间歇性地输送到导蒜管中,由拨蒜杆周期性运动控制蒜瓣输送速度,蒜瓣最终落入到播种爪中且成直立状态;同时,凸轮机构在电机的带动下转动,推动滚轮下压压蒜杆沿主体内腔竖直往下运动,压蒜杆下压蒜瓣促使播种爪张开,从而蒜瓣被压入种穴中;随后,播种爪在扭簧作用下回位,压蒜杆在弹簧作用下也向上归位,完成了一次种植。
为了实现大蒜的直立种植,设计重点如下:
1)右边导蒜管外端设有小的凸轮机构,通过与播种速度协调一致,来保证一次只能通过1颗蒜瓣,并将调整装置上的蒜瓣压入到播种爪中,在种沟中保持直立。
2)压蒜杆的端部设计为中空段且内附有弹性橡胶套,其目的是避免压蒜杆下压蒜瓣时损伤芽端。
3)播种爪的材料采用塑料(塑料相对于金属材料质地更软,不至于损伤蒜瓣),压蒜杆将蒜瓣压入播种爪后使其扩张;此外,播种爪与机构主体采用扭簧连接,从而保证压蒜杆撤回后播种爪能自动复位。
4)非封闭式的播种爪将蒜瓣插入种穴过程中,播种爪扩张,周围的泥土通过爪的间隙进入并覆盖住蒜瓣,从而保证当播种爪撤回后蒜瓣依然能够呈现稳定的直立状态。
3.4 方案优劣分析
方案的优劣分析如表2所示。
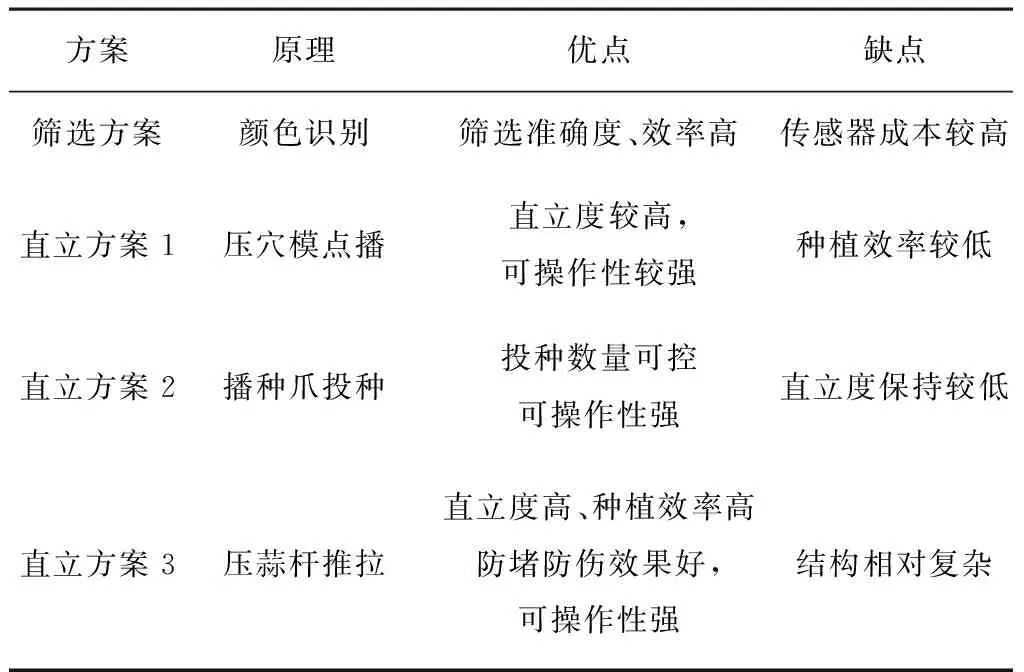
表2 方案优劣分析
为了验证方法的可行性,制作简易的设计装置并进行试验验证。利用硬纸板做出简易的大蒜筛选器的锥形杯并粘贴固定在一段塑料水管上,用牙签作为轴II,模拟大蒜筛选方案,可实现蒜瓣的分类功能;用薄铁片制作直立方案1中的压穴转盘、方案2中的播种爪固定件与可动件(铆钉将二者进行铰接)和方案3中的播种爪,取50粒白皮蒜瓣进行简单模拟实验。试验结果发现:该3种方案均可实现大蒜的直立种植,但直立度保持程度存在差异,方案3的直立效果最佳,与地面夹角范围约为80°~ 90°;方案1与方案2中大蒜与地面夹角范围约为60°~ 85°。
4 结论
1)为实现大蒜芽端方向筛选,提出了一种基于颜色传感器识别原理的筛选方案。通过取种器中的取种钩实现单粒取蒜,利用弹簧管的伸缩特性保证蒜瓣输送通畅;再结合单粒排种器的作用,三者相互配合,保证了蒜瓣输送数量和速度,有效地减小了蒜瓣因数量过大而发生拥堵现象。本方案相比于纯机械结构,筛选效率高,准确度高,且符合机械化的发展趋势。
2)为实现大蒜直立种植,提出了3种种植方案:方案1采用压穴转盘压出锥形穴,利用锥形穴内壁特点扶正蒜瓣直立;方案2采用周期性开闭的播种爪进行种植,利用其结构特点保持蒜瓣的直立状态;方案3采用的播种爪受到蒜瓣挤压扩张后,土壤进入将蒜体覆盖,从而实现撤离后蒜体仍处于直立状态。
[1] 崔荣江,张华,徐文艺,等.我国大蒜机械化生产现状及发展思路探讨[J].农机化研究,2015,37(3):264-268.
[2] 林悦香,尚书旗,杨然兵.大蒜生产机械的现状与发展[J].农机化研究,2012,34(3):242-245.
[3] 李立新, 李小忠, 钱志兵.大蒜播种机械现状与发展方向[J].现代农业科技,2012 (21):220-221.
[4] 金诚谦,袁文胜,吴崇友,等.大蒜播种时鳞芽朝向对大蒜生长发育影响的试验研究[J].农业工程学报,2008(4):155-158.
[5] 崔荣江,张华,徐文艺,等.大蒜种体入土后的直立栽种条件研究[J].农机化研究,2015,37(2):83-86.
[6] 邹帅,魏玉珍,刘勇兰,等.大蒜直立筛选方法探究及其装置方案设计[J].农机化研究,2015,37(11):67-70.
[7] 王娟,史留勇,袁成宇,等.大蒜蒜瓣识别与转向装置设计[J].农机化研究,2013,35(6):94-97.
Method Inquisition of Garlic Bud Screening and Upright Planting
Wei Yuzhen1, Zou Donglin2, Liu Yonglan2, Xi Guannan1
(1.School of Mechanical Engineering, Nantong University, Nantong 226019, China; 2.Department of Mechanical and Electronics, Nantong Technology Vocational College, Nantong 226007, China)
China is one of the major producing countries of garlic, but the domestic mechanization in garlic planting develops slowly for the artificial panting method. With the people-depth study of garlic planting technology, the pattern of upright planting with upward buds has become an essential requirement gradually. In order to ensure the quality of garlic and to improve the planting efficiency, the reproductive pattern, agronomic requirements and geometric characters has been analyzed in the present study. And then, one bud screening method and three upright planting methods were proposed to overcome how to screen accurately and seed uprightly. Moreover, devices design, advantages analysis and feasibility verification were conducted for the optimization of the garlic planting machines in China
garlic; upright screening; characteristics analysis
2016-08-25
国家自然科学基金项目(51476080);南通市市级科技计划项目(MS12015088);南通市传热强化与过程节能重点实验室项目(CP12012004)
魏玉珍(1990-),女,山东日照人,硕士研究生,(E-mail)2587394994@qq.com。
喜冠南(1956-),男,江苏南通人,教授,博士,(E-mail)guannanxi@ntu.edu.cn。
S223.94
A
1003-188X(2017)10-0113-06
