基于数字PI算法的精准施肥控制系统设计及仿真
2017-12-16李宜汀张富贵卢剑锋吴雪梅樊国奇
李宜汀,张富贵,卢剑锋,吴雪梅,樊国奇,高 贵
(1.贵州大学 机械工程学院,贵阳 550025;2.贵州省烟草公司毕节市公司,贵州 毕节 551700;3.贵州省烟草公司黔西南州公司,贵州 兴义 562400)
基于数字PI算法的精准施肥控制系统设计及仿真
李宜汀1,张富贵1,卢剑锋1,吴雪梅1,樊国奇2,高 贵3
(1.贵州大学 机械工程学院,贵阳 550025;2.贵州省烟草公司毕节市公司,贵州 毕节 551700;3.贵州省烟草公司黔西南州公司,贵州 兴义 562400)
为了使施肥速度与机器行进速度同步,提出了一种基于数字PI算法的闭环施肥系统,主要由传感器、PLC、脉宽调制电机驱动器(PWM驱动器)、GPRS模块及直流无刷电机组成。通过检测拖拉机的速度信号及外槽轮转速,PLC根据所输入决策经PWM驱动器对外槽轮下料速度进行闭环控制,从而实现精准施肥。仿真实验结果表明:基于数字PI算法的闭环控制系统提高了施肥精度和响应速度,机具操作简单,在田间工作性能稳定。
精准施肥;数字PI算法;PLC;PWM
0 引言
据统计,我国化肥施用量是国际标准的1.93倍[1]。肥料较低的利用率和较大的施用量造成了经济上的巨大损失和严重的环境污染,因此实行科学的变量施肥是农业可持续发展函待解决的问题。精准施肥技术根据作物类型对施肥量进行匹配,使肥料利用率大幅度增加。我国现有的施肥机具大多采用直流电机作为驱动源,PWM脉宽调制技术运用于驱动直流电机时低速性能好、稳速精度高、调速范围宽且动态响应快,其较强的抗干扰能力保障了野外作业的稳定性。
近年来,众多学者对精准施肥技术进行了设计仿真。2010年,梁春英等根据机械动力学原理和电学原理建立了变量施肥控制系统的数学模型,选取PID参数改善了控制系统性能[2]。2012年,张睿等基于PWM技术设计了一种闭环控制肥料抛撒幅宽调控系统,通过试验建立了幅宽与圆盘转速的数学模型[3- 4]。日本的TABATA公司设计了一种颗粒肥变量施肥机,使用外槽轮排肥盒作为排肥机构,通过监测施肥机的前进速度用以控制外槽轮的转速,以实现精准施肥;施肥机的最大施肥误差为5%,系统响应时间为0.95~1.90s。在众多研究中,采用数字化算法实现施肥量控制的并不多见。为此,本文通过实验拟合出施肥函数曲线,建立离散化后的数字PI施肥算法模型,构建系统的虚拟开环频率传递函数,并通过计算机进行仿真,选取最优PI参数[5]。
1 施肥系统组成及原理
变量施肥机具的总体结构示意图如图1所示。整个机体经悬挂装置固定在拖拉机后部,与拖拉机行进速度一致。系统工作时,拖拉机通过万向节传输过来的动力带动旋耕刀片松土,外槽轮在直流电机的带动下开始下料,落入排肥管的肥料经排肥舌均匀地施入土壤,完成施肥过程[6]。移速传感器安装在拖拉机后轮轴上检测整套装置的前进速度(见图2),外槽轮的下料速度则依靠安装在排肥轴上的转速传感器(见图3)进行反馈[7]。

1.转速传感器 2.排肥管 3.行走轮 4.排肥舌

图2 移速传感器安装图 图3 旋转编码器安装图
首先,根据以下方法测出施肥函数曲线:使拖拉机保持匀速行驶,反复改变外槽轮的转速大小,直到肥料施用率的误差在允许范围内,记录下此时Va和VP作为一组对应点并输入到PLC;反复得到多组对应点后,在PLC内部子程序采用线性插图值法可计算出相邻对应点间的拖拉机移速与外槽轮转速对应关系,形成施肥决策;施肥决策可在触摸屏上进行选取[8]。施肥机具行进过程中,当移速采样周期结束时,安装在拖拉机上的速度传感器将速度信号传送到控制器PLC中,PLC根据选取的施肥量曲线和所采集到的信息做出判断,控制PWM电机驱动模块对直流电机无极调速;在此过程中,转速传感器将外槽轮转速反馈到PLC中,并经过控制器内部设定的数字PI算法实现整个施肥系统的闭环控制,以实现精准施肥过程[9]。此外,触摸屏中可直观显示出传感器的实时数据,并可经过GPRS无线模块发送到工作站上位机中,用以作为今后调研的参考,这对作物施肥量曲线的改进大有裨益[10]。
2 控制系统设计
2.1 总体方案
控制系统的流程如图4所示。总控PLC采用了西门子公司生产的CPU 224xp[11]。拖拉机蓄电池提供的12V电源经升压模块为系统供应24V电源。PLC接收到移速传感器的速度信号后匹配出相应模拟量电压到PWM电机驱动模块,后者输出所需占空比的高频脉冲对直流电机进行无极调速。转速传感器反馈的速度信号经转换后与给定电机电枢电压对比,经PI调节器迅速响应到给定速度并消除误差。无线模块将实验中的作物类型与实验数据传输到上位机中存储起来[12-13],放置在驾驶室的触摸屏经PPI通讯协议与PLC进行数据交换。由于施肥对象及土壤肥瘦的改变对应着不同的施肥量,且野外工作的地理环境复杂多变,因此使用者可在触摸屏上选取手/自动施肥模式用以控制施肥量。

图4 控制系统流程图
2.2 直流电机的PWM驱动控制
控制系统电机驱动模块选用了宏恩HE-5030-Z 可逆脉冲宽度调制(PWM)驱动模块,以实现直流电机的无极调速。可逆PWM变换器的电路原理图如图5所示。4个电子电力开关的通断时间实现了电动机电枢电压的改变,得到可变占空比的电压脉冲。当VT1和VT4同时通断时,发动机M电枢两端承受电压+Us;VT2和VT3同时通断时,电动机M电枢两端则承受电压-Us。在1个周期T中,VT1和VT4(或VT2和VT3)的导通时间ton与周期T的比值等于电动机电枢平均电压值Ud与Us的比值,即
(1)

图5 PWM脉宽调制原理图
2.3 GPRS模块的数据传输
GPRS模块选用巨控公司生产的GRM 202G无线模块,该模块通过PPI协议与PLC通讯并作为主站对其进行读写操作。GPRS模块安装流量卡后,连接网络的上位机通过组态软件可绑定GPRS模块内的各个变量(见图6),实现对PLC各存储区的数据采集整理与遥控操作。传感器采集到的拖拉机移动速度及外槽轮的转速在每个数据采集周期被上位机中储存起来,做成趋势图或报表的形式,成为日后改进施肥函数曲线的依据。
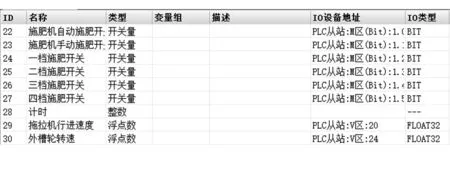
图6 GPRS模块绑定变量示意图
3 数字化PI算法的设计与实现
3.1 积分分离算法
在传统的模拟电路PI调节器中,由于受到元器件的物理条件限制,只能在不同所得指标中求折中;而采用数字PI算法时,PLC的强大逻辑运算能力和数字运算能力就可发挥巨大作用,若加以适当运用,则可大幅度提高系统性能[14]。
在调速系统常用的PI调节器中,比例调解器能起到快速响应的作用,积分调节器则会在有偏差的作用下逐步消除偏差,使系统趋于稳定。在积分分离算法中,P调节器可独立于I调节器存在,两个调节器亦可同时发挥作用。积分分离算法的表达式为
(2)
CI=1(|e(i)|≤δ)或CI=0(|e(i)|>δ)
式中Tsam—CPU采样时间;
KP—比例调节系数;
KI—积分调节系数;
e(k)—比例调节误差;
e(i)—积分调节误差;
δ—可接受误差常值。
由式(2)可知:确定积分分离算法中的比例调节系数KP和积分调节系数KI,即可实现对整套控制系统的PI数字化调节。
3.2 数字转速调节器的设计
在整个闭环系统中,取转速环小时间常数TΣn等于转速滤波时间常数Ton,使用积分分离算法作Z变换并运用线性定理和平移定理得
(3)
则转速调节器脉冲传递函数为
(4)
而控制对象的脉冲传递函数为
(5)
其中,控制对象脉冲传递函数放大系数为
(6)
式中R—电枢电阻;
Ce—电动势系数;
Tm—机电时间常数;
Ka—转速反馈储存系数,此处在CPU中用一个字进行存储。

综上所述,离散系统的开关脉冲传递函数为
(7)
(8)
其中,开环放大系数(单位为s-2)为
(9)

系统的开环虚拟对数幅频特性为
(10)
系统的开环虚拟对数相频特性为
φ(λ)=180°+tan-1τ1λ+tan-1τ4λ
-tan-1τ3λ-tan-1τ2λ
(11)
由以上分析可知:确定了中频带宽h后,采用相角裕度最大法则,根据系统相频特性计算出最大相角裕度γmax,γmax对应的虚拟角频率即为虚拟截止频率λc;根据幅频特性可得系统开环放大系数K0,即可确定系统的开环传递函数,之后进行闭环控制仿真。整个计算和仿真过程通过MatLab 软件编程实现。
3.3 数字PI算法性能分析
选取不同的中频带宽h进行仿真后对比结果如表1所示。分析表中数据可知:当h=7时,各参数较为均衡,故选取中频带宽h=7建立数学模型。以阶跃信号模拟输入电压信号,将无数字化PI控制策略时域响应图(见图7)与带有数字化PI控制策略的时域响应图(见图8)对比可知:数字化PI控制策略减少了系统的振荡次数,在瞬间消除掉了超调量的影响,并在0.3s内使系统输出完全趋于稳定,能够满足施肥机械在实际生产中的准确性和快速性。

表1 不同中频带宽响应参数表

图7 无数字化PI控制策略系统时域响应图

图8 含数字化PI控制策略系统时域响应图
系统的频域bode响应如图9所示。相位裕度达到了34.04°,中频带宽较长,可见系统不仅稳定,响应也很迅速。

图9 系统频域响应bode图
4 实验结果及分析
4.1 施肥决策函数的确定
2016年6月,在贵州省大方县黄泥塘镇针对种植烟叶的田地进行了整机测试。烟叶施肥量标准为675kg/hm2,所施肥种为无机复合肥料。由于贵州省属于山地地形,平整土地较小,实验根据烟草株距换算后选取施肥量标准为2.8kg/30m进行验证。其中,整套机具选用了耕王804拖拉机作为动力源进行移动及旋耕,将收纳袋用扎带固定在排肥舌处接收肥料。实验时,将接近开关安装在拖拉机后轮轴上,接近开关每检测到一个螺钉时会返回一个脉冲值到PLC的高速计数器中,通过加装螺钉可使拖拉机后轮每转1圈返回16个脉冲以提高测速精度。将空心旋转编码器安装在排肥轴上通过z相信号线获取转速信息并存储在PLC中。实验开始时,拖拉机以固定速度匀速行驶,以后轮作为参考,当后轮驶过0m标志线时,由驾驶员打开触摸屏上预设的施肥速率恒速施肥,计时员开始计时;拖拉机驶过30m标志线时则关闭施肥状态并停止计时,将收纳袋用电子秤称重;记录此间接近开关返回的脉冲值、施肥量及施肥时间。施肥量误差小于5%时标志出该组实验数据,否则以该拖拉机移速为准改变排肥轴转速继续实验,共得出5组满足条件的数据,如表2所示。

表2 施肥函数实验数据记录表
在5个数据点间使用线性插值的方式确定出烟叶无机复合肥施用函数决策,并输入到PLC中。
4.2 数字化PI调节器性能检测
实验选取了黄泥塘镇4处实验田地,根据田地尺寸计算出标准施肥量后使用石灰粉标记出田地范围,实验前将加入肥箱中的肥料量先称重并记录。实验开始后,拖拉机驾驶员在经过田地标志线时点击触摸屏开启自动施肥模式,并在每垄施肥结束后停止施肥。当实验田地施肥完成后,将剩余肥料排出用收纳袋装好称重,两次称重的差值与标准施肥量对比即可求出误差率。实验分为含数字PI算法的施肥控制组与非数字PI算法的施肥控制组进行施肥误差率对比,如表3所示。

表3 有无数字PI控制策略施肥量对比表
施肥系统工作时的传感器感应数据在上位机中以10s为周期采集一次,生成图10所示报表。

图10 组态软件实时报表生成图
由实验数据可知:含数字化PI控制策略的施肥过程中施肥量精度有了一定提高,烟叶无机复合肥施肥量误差在5%以内。
5 结论
1)设计了一套精准施肥系统,该系统结构简单,易于操作,可满足农业生产中的施肥精度要求。由于选用了直流电机驱动外槽轮转动,系统维修与维护方便,适于大部分地区的旋耕施肥一体化。
2)建立了精准施肥系统的数字化PI控制策略的
数学模型,并用MatLab仿真,对PI参数进行了整定,使施肥系统输出响应快,稳态精度高,建立的二阶系统虚拟传递函数抗干扰能力较强,适应施肥机具野外的工作状况。
3)经GPRS模块返回的实时数据结合施肥误差可不断修改施肥决策,优化精准施肥。
4)施肥机具的移速采集及人机交互界面在智能化方面还应当有所提升,各种作物的施肥函数库有待进一步完善。在今后的研究中,应不断尝试使用新型传感器采集移速信息,优化人机界面,以提升精准施肥程度,并在实验中获取其他作物的施肥函数,真正做到因材施肥。
[1] 孙国祥,陈满,汪小旵,等.变量施肥机分关键技术研究现状分析 [J].江苏农业科学2014,42(2):333-338.
[2] 梁春英,衣淑娟,王熙,等. 变量施肥控制系统PID控制策略[J].农业机械学报,2010,41(7):157-161.
[3] 张睿,王秀,赵春江,等. 链条输送式变量施肥抛撒机的设计与试验[J].农业工程学报,2012,28(6):20-25.
[4] 李加念,洪添胜,冯瑞钰,等. 基于脉宽调制的文丘里变量施肥装置设计与试验[J].农业机械学报,2012,28(8):105-110.
[5] 张辉,李树君,张小超,等. 变量施肥电液比例控制系统的设计与实现[J].农业工程学报,2010,26(S2):218-222.
[6] 李文哲,袁虎,刘宏新.沼液沼渣暗灌施肥机设计与实验[J].农业机械学报2014,45(11):75-80.
[7] 古玉雪,苑进,刘成良,等. 基于模糊系统的开度转速双变量施肥控制序列生成方法[J].农业工程学报,2011,27(11):134-139.
[8] 吕品.PLC和触摸屏组合控制系统的应用[J].自动化仪表,2010(8):49-51.
[9] 付威,罗锡文,曾山,等. 水稻精量旱穴播机穴距电液比例控制系统的设计与试验[J].农业工程学报,2015(9):25-31.
[10] 耿向宇,李彦明,苗玉彬,等.基于GPRS的变量施肥机系统研究[J].农业工程学报,2007,23(11):164-167.
[11] 邵利敏,王秀,刘晓颖,等.基于PLC的变量施肥控制系统设计与试验[J].农业机械学报,2007,38(11):84-87.
[12] 张宏坡,康龙云.基于OPC技术的PLC上位机管理系统[J].制造业自动化,2011(18):78-81.
[13] 姚舟华,魏新华,左志宇,等.自动灌溉施肥机工作状态监控系统[J].农业机械学报,2012,43(S1):44-47.
[14] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.Abstract ID:1003-188X(2017)10-0108-EA
Design and Simulation of Precision Fertilization Control System Based on Digital PI Algorithm
Li Yiting1, Zhang Fugui1, Lu Jianfeng1, Wu Xuemei1, Fan Guoqi2, Gao Gui3
(1.College of Mechanical Engineering, Guizhou University, Guiyang 550025, China ;2.Bijie Branch of Guizhou Provincial Tobacco Corporation, Bijie 551700, China ;3.Qianxinan Branch of Guizhou Provincial Tobacco Corporation,Xingyi 562400, China)
In order to make the rate of fertilization consistent with the speed of the machine, this paper presents a closed loop fertilization system based on the digital PI algorithm. It mainly consists of sensor, PLC, pulse width modulation motor driver(PWM driver), GPRS module and DC brushless motor. According to the speed of the tractor and the outer groove wheel, PLC makes PWM driver to control the speed of the external groove wheel by the input decisions, so as to realize the precision fertilization.The simulation and the experimental results show that the closed loop control system of the digital PI algorithm can improve the precision and speed of fertilization.The whole set of equipment is simple in operation and stable in the field.
precision fertilization; digital PI algorithm; PLC; PWM
2016-08-11
贵州省科技重大专项(黔科合重大专项字[2014]6015-6号);贵州省烟草公司毕节市公司科技项目(贵烟毕科[2015]3号);贵州省烟草公司黔西南州公司科技项目(贵州烟司[2015]41号)
李宜汀(1992-),男,贵州六盘水人,硕士研究生,(E-mail)494314787@qq.com。
张富贵(1973-),男,贵州仁怀人,硕士生导师, (E-mail)zhfugui@vip.163.com。
S224.2;TP23
A
1003-188X(2017)10-0108-05
