基于专家模糊PID控制的生物炭炭化炉的研究
2017-12-16张志霞夏聆智王永刚陈温福
张志霞,夏聆智,王永刚,陈温福,孟 军
(沈阳农业大学 a.信息与电气工程学院;b.农学院,沈阳 110866)
基于专家模糊PID控制的生物炭炭化炉的研究
张志霞a,夏聆智a,王永刚a,陈温福b,孟 军b
(沈阳农业大学 a.信息与电气工程学院;b.农学院,沈阳 110866)
加热炉的特性参数由于受负荷或干扰因素的影响,具有时变性、大滞后、大惯性及一定非线性的特点。生物炭作为一种新型土壤改良剂与全球温室效应缓解良药吸引了各国研究人员的兴趣,其制取设备—生物炭炭化炉是一种特殊的加热炉,它不仅要求精准控温避免超调,还要求可控升温速率,这对于该炉的设计提出了不小的挑战。为此,应用专家模糊PID控制系统实现了生物炭的精确制备,并在MatLab/Simulink仿真的基础上,验证了该设计满足生物炭炭化高精度、无超调的要求。
炭化炉;模糊控制;专家控制;PID控制
0 引言
在PID控制系统中,一旦负载发生变化,为了达到更好的控制效果,需要对PID参数进行二次调节。因此,依靠单独一组PID参数进行控制的传统纯PID控制不能满足工业领域的动态要求[1]。自适应控制运用现代控制理论在线实时修改控制策略,然而其控制品质取决于对模型辨析的精确程度,在复杂系统中难以实现。专家PID控制策略虽然可以根据工作人员们的经验作为知识存储在数据库中,实现实时最佳控制;但如果被控对象不易精确描述,各种信号不易定量表示,则专家PID控制策略会受到限制。由此,人们将视角转换到了模糊数学领域,引入模拟人类思维方式的模糊控制,结合PID控制研制出了模糊PID控制器,其简单、实用、鲁棒性强,满足了工业领域的动态要求[2]。
由于具有时变性、大滞后、大惯性及一定的非线性等特点,加热炉的精准控温是十分困难的,同时负载的变化或其他干扰会影响被控对象的特性参数。作为加热炉的一种,生物炭炭化炉对温度的控制要求更高。近年来研究结果表明,炭化温度与升温速率对生物炭产量与品质起着最主要的作用。低温(约300℃)低加热速率(3~5℃/min)的环境使得生物炭产量相对较高,原因归咎于在该种环境下热解过程(解聚、水解、氧化脱羧与脱水)中的第4步骤—脱水反应时间加长,易形成稳定物质(生物炭)。升温速率的提高会缩短脱水反应的时间,导致产生较高比例的不稳定产品(气体和生物油),使生物炭的产量降低;但高速率升温可以优化生物炭的芳香结构(可延长生物炭的寿命)、比表面积(增加电导率和阴阳离子交换能力,即营养元素的交换容量以及利用率)和孔隙结构(适合微生物的生长)[3-5]。同时,由于炉内控温系统一般不具备逆向调节功能(降温能力),其降温主要依靠炉体自身散热,如若系统发生超调现象,将会对生物炭产物造成不可逆影响。因此,为了满足炭化要求,控制器应既可跟踪阶跃信号,对于一阶上升信号也应有很好的跟踪性能。由此,引入专家控制既可以在保护设备的同时避免系统发生温度超调,也可使该控制器具有自我调节能力。
本文设计一套控制理论用以实现炭化炉精准控温,并基于MatLab仿真结果证明该理论可以实现生物炭的精确制备。
1 专家-模糊PID控制器的设计
在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的关键,系统的动态信息越详细,越能实现精确控制[6]。但是,在复杂系统中,变量过多,对于正确地描述系统模型往往很困难,于是工程师便利用各种方法来简化系统模型,以达成控制的目的,但却不尽理想。换而言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力[7]。因此,人们尝试着以模糊数学来处理这些控制问题。模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既有系统化的理论,又有大量的实际应用背景。模糊PID控制是在PID控制的基础之上发展起来的,它基于模糊控制理论,通过分析误差e与误差变化率ec,在线实时调节PID的参数Kp、Ki和Kd。模糊PID控制克服了纯PID或模糊控制器的缺点,能适应各种场合的控制需要,稳定性、鲁棒性、精准性均高于传统PID[8]。
一般来讲,模糊控制器内部控制规则一旦确定就不宜更改,自适应力、灵活性和交互性不是很好,尤其是输出的量化因子大小选取问题是一个难点。如果其值较小,控制效果不明显,甚至无控制效果;较大则系统出现超调现象。相反,专家系统为非封闭系统,可使该控制系统具有自我调节能力,在线处理的灵活性也可使系统的升级较为简单[2]。因此,将模糊PID控制与专家控制相结合,就会得到一款高精度、高适应能力的控制器。
专家控制器通过控制模糊控制器的输出量化因子可使该控制系统具有调节能力,也可起到保护设备、防止温度超调过高目的。因此,它可以稳定炉内温度,避免一些测量引起的误差及在误差范围内的温度冲击,迅速满足测试要求。专家控制器主要由知识库内的专家决策控制,控制语句为“if then”的形式。将专家控制与模糊PID控制相结合得到专家模糊PID控制器,专家模糊PID控制器主要由模糊化、模糊推理、反模糊化和专家决策构成。
1.1 模糊PID控制器
经典PID控制器是由比例项(P)、积分项(I)、微分项(D)线性组合而成的[9]。公式为
其中,Kp、Ki、Kd分别为比例、积分和微分环节的参数。
其中,比例环节用于成比例的反映系统的误差e、Kp的大小在一定范围内影响着控制信号反应的快慢,积分环节起到消除静差的作用。Ki过小,则收敛时间较长;Ki过大,易在前期形成积分饱和,使系统出现较大的超调量。微分环节反应误差e的变化率,在大滞后系统中尤为重要,它可以提前预判出系统的变化方向,从而在控制早期引入修正信号,提高系统的动态特性,其作用相当于“抑制”变化;但Kd值过大会使控制信号出现“毛刺”现象。
本文选用二维模糊控制器Mamdani型模糊推理方法。模糊控制器的原理可以理解为:首先,将实际中的误差e、误差变化率ec由基本论域(实际范围)变为模糊论域,分别记为E与EC,一般的处理方式多采用基本论域乘以其对应的量化因子;但在实际应用中,为了简化计算,也有分段取整离散化的处理方式。当误差e与误差变化率ec转变为模糊论域后,根据其模糊集的隶属函数确定E与EC对于某个模糊集中元素的隶属程度,然后由模糊规则给出模糊输出量,最后将模糊输出量反模糊化并乘以其量化因子得出最终实际输出。
1.1.1 模糊化
模糊化过程就是将输入的精确量转换为模糊集中的元素,但这种转化不是定性的转化(即“是”与“不是”),而是一种概率的认为。例如,误差e模糊化后,其30%隶属于NS,70%隶属于ZO。令误差e与误差变化率ec及PID参数的KP、KI、KD的模糊论域定义为{6,5,4,3,2,1,0,-1,-2,-3,-4,-5,-6},模糊集为{NB,NM,NS,ZO,PS,PM,PB}。模糊集中元素的多少影响模糊控制的灵敏程度。模糊集元素越多,模糊控制器控制越精准;但元素的增加会导致模糊规则语句成倍数增长。因此,模糊集元素个数选择应适当。
隶属函数:隶属函数可以被定义为线性或非线性函数。为了体现控制系统的“刹车”能力,防止超调现象,选ZO为高斯型,ZO之外的隶属函数选择为三角型。同时,为了防止出现“刹车过头”—响应曲线出现跌落现象现象,因此ZO对应的模糊论域范围应较小,NS峰值对应的横坐标适当右移大于-2,PS峰值对用横坐标适当左移小于+2。其余,模糊集中元素峰值横坐标分别对应-6、-4、+4、+6。
1.1.2 模糊规则
在关系函数得到确认后,根据专家经验与实验结果分析,设计控制规则调整表。
1)阶跃型。当误差e在图1中I段时,此阶段为全速加热阶段。此时误差较大,无论ec为何值,Kp均应以较大值输出,达到快速减少误差的目的;但由于炭化炉属于大惯性加纯滞后系统,如果滞后情况严重,Kp值选择应适中,防止系统出现振荡现象;系统滞后时间越长,Kd取值应越大,增加系统的稳定性;同时,为了避免积分环节饱和引起的超调现象,Ki应较小或取零。
2)当误差e在图1中Ⅱ段时,此阶段为快速加热阶段。为了保证系统避免出现超调现象,这时Ki、Kd大小应适中,以保证系统的响应速度,Kp值应较小。
3)误差e在Ⅲ段时,系统处于收敛阶段。为使系统有较好的稳定性,应增大Kp和Ki,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,应适当选取较大kd值。其原则是:ec较小时,kd可取大些,通常取为中等大小;当ec较大时,kd应取小些。
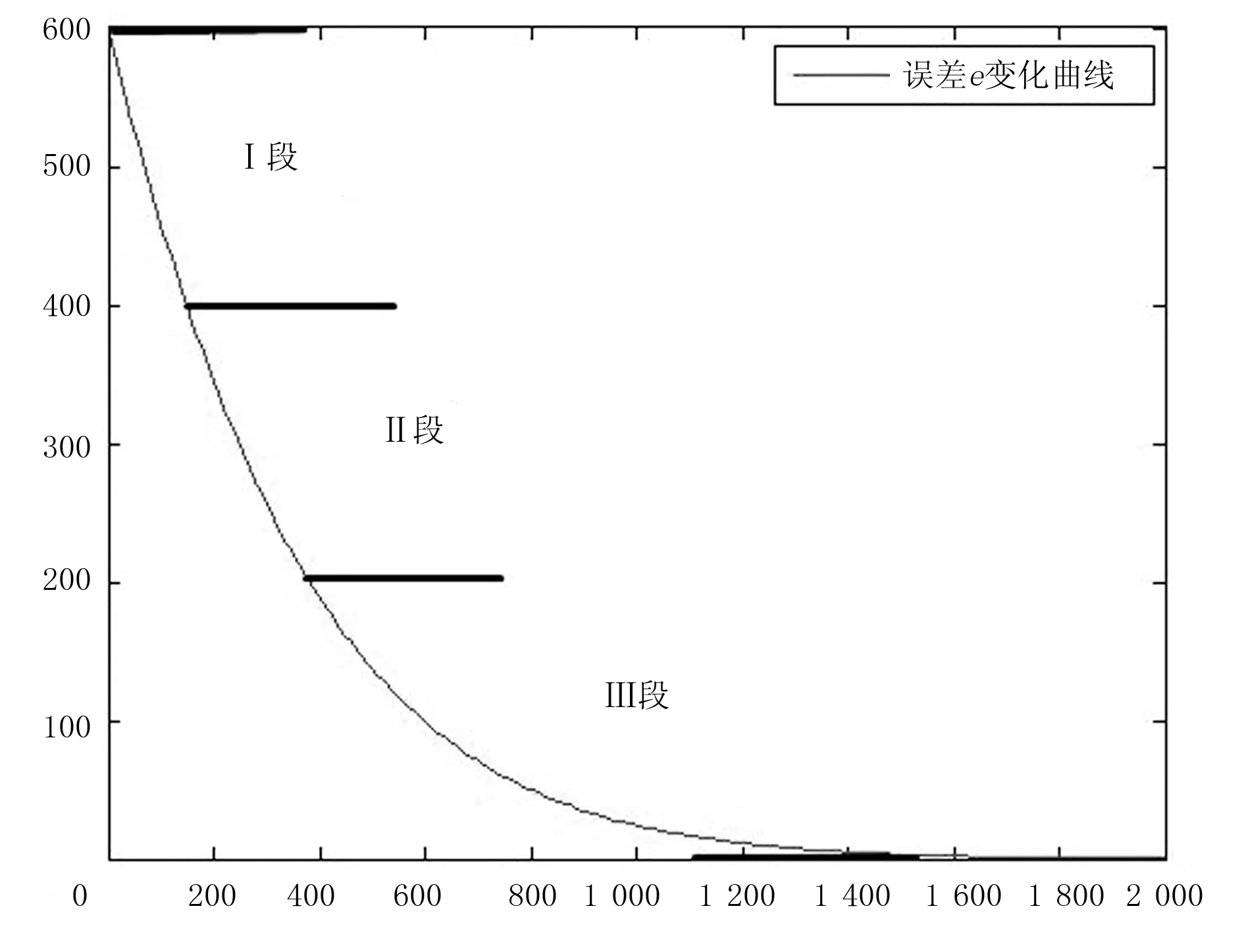
图1 阶跃型输入情况下系统误差e变化曲线
4)一阶上升型输入信号,即对炭化炉控温的同时,控制其加热速率。该种情况在图2中Ⅰ、Ⅱ阶段为跟踪上升曲线阶段。对于滞后系统来说,一般不会反生超调现象。该种输入信号情况下,比例环节作用为加强控制系统的跟踪特性,缩短Ⅰ时段时间,使Ⅱ时段时间相对延长。但Kp过大会使系统围绕上升曲线发生振荡现象,过小则会延长Ⅰ阶段时间,同时系统易发生超调现象。在一阶上升型输入中起最主要作用的是积分环节,积分环节决定系统对Ramp型的跟踪能力。Ki过小,跟踪能力弱,升温速率不足;过大,将会引发超调现象。

图2 一阶上升型输入情况下系统误差e变化曲线
Ⅰ段为未收敛跟踪阶段:该时段内,输入信号值逐渐升高,误差e变大,误差变化率为正数。此时,为了使系统快速到达Ⅱ阶段,Kp、Kd值不宜过大;系统响应的斜率是否满足要求和系统响应速率取决于Ki的大小,所以此阶段应增加积分环节系数Ki的大小。
当系统到达Ⅱ阶段时:误差e维持恒定,误差变化率ec为零。此时为系统上升曲线跟踪收敛阶段,系统已实现平稳跟踪输入信号。为了防止误差扰动及Ⅱ阶段到Ⅲ阶段斜率的阶跃现象照成微分环节出现较大波动,Kd值应较小值,Kp、Ki取适当值,以避免响应出现波动。
Ⅲ阶段可看作系统输入阶跃信号阶段:为了缩短此阶段时长以及避免发成超调现象,Ki、Kd均取较小值,Kp取值不宜过大。
由以上要求设计出的模糊控制规则如表1所示。
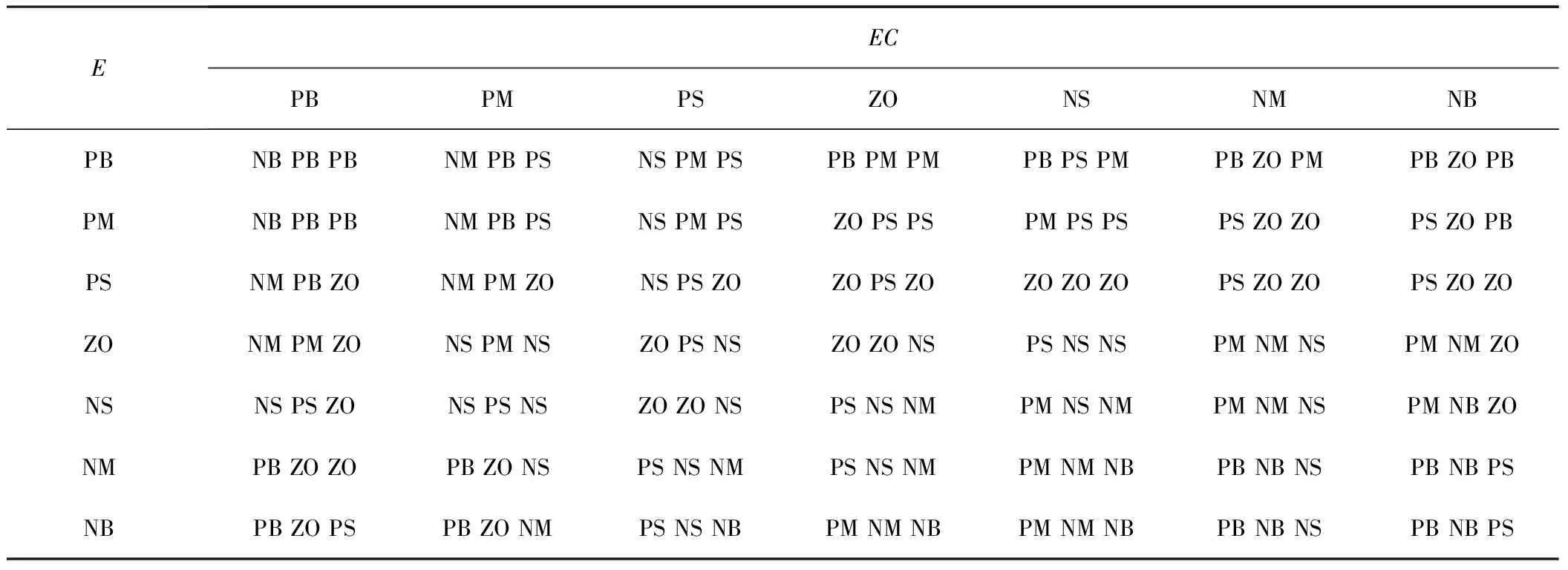
表1 模糊控制规则表
表内的3个模糊集元素由左到右分别表示Kp、Ki、Kd的模糊集元素。
根据表1,可以得到49×3个模糊规则,可以被描述如下:
If E=Aiand if EC =Bjthen kp( ki, kd)=Cij
其中,Ai、Bj和Cij分别是误差E,误差变化率EC和PID参数KP、KI、KD的模糊集中元素。
1.1.3 反模糊化
模糊控制器将输入模糊化,通过模糊控制规则表得出结论后,将该结论反模糊化后乘以量化因子,即可得到模糊控制器的控制输出。目前,常用的反模糊化方法有最大隶属函数法、重心法及加权平均法等。最大隶属函数法就是取隶属程度最大的规则对应的结果为控制器的输出,其计算简单、易于在实际中实现,但对于输入的小范围变化不够灵敏,控制器不够精确。因此,本文采用重心法,即将模糊输入对应的每个模糊结论乘以其隶属程度求和后除以隶属程度之和,公式为
其中,n为输出模糊集中元素个数;ci为输出模糊集中的元素;μc(ci)为ci元素的隶属度。
通过重心法,对于输入的较小范围变化,输出也会有相应的响应变化,使得控制器具有较好的动态特性。
1.2 专家控制规则
专家控制器构建方法各不相同,但归结起来,其实现方法可分为两类:一类是保留控制专家系统的结构特征、分层递推、模仿人类智慧、有等级的智能系统;另一类是以某种控制算法(例如PID控制)为基础、引入专家系统技术、以提高原控制器的决策水平。专家式控制器虽然功能不如专家系统完善,但结构较简单、研制周期短、实时性好,具有广阔的应用前景。该控制器通过MatLab中的S函数来实现,其具体规则如下:
1)若超调量超过20%,则立即停止加热。由于模糊控制器对于PID参数只是一种范围性的调节,其目的为误差大时,使系统快速跟踪输入信号;误差小时,使系统“减速”,避免超调。因此,出现该种情况多为PID初始参数选取不佳,应调整PID初始参数,一般只需缩小Ki大小即可。
2)若超调量超过5%(研究结果表明,超调量在5%以下时,对生物炭性质影响不大[5]),宣布该次实验失败,同时缩小模糊控制器输出的积分量化因子与比例量化因子。该种措施会减小系统超调量,在重复实验中,若其他条件不变(加料多少,初始温度等不变),最终会达到理想效果。
3)当误差变化率变号特别频繁时,该种情况多为微分量化因子过大,使系统出现“毛刺”现象,此时专家控制应缩小微分量化因子。
2 炭化炉温控系统结构
炭化炉温控系统结构如图3所示,采用专家模糊PID控制。

图3 温控系统结构
模糊控制器由MatLab中自带Fuzzy工具箱编写,专家控制由S函数编写。炭化炉传递函数通过飞升曲线测量方法测得,炭化炉内的温度一般由温度传感器来采集。炉内温度作为炭化炉的反馈环节,它与实际设定值之间的差为误差e,误差e的变化率设为ec。该温控系统中含有两套控制系统,即模糊PID控制和专家控制。当未发生超调现象时,模糊PID控制系统起主要作用;当发生超调后,专家控制根据超调量,自动修改模糊控制器的输出,使得重复性实验最终可以达到理想效果。因此,该系统具备自我调节能力。对于阶跃型信号,它在前期控制力度大,升温速率快,在误差较小的后期控制力度减少,防止超调;对于一阶上升型信号,它具备良好的跟踪特性,可以实现炭化炉的可控升温速率。图4为仿真模型。
3 仿真验证

利用Fuzzy工具箱与S函数分别编写模糊控制器与专家控制器。输入信号为阶跃信号与一阶上升信号,其输入情况下系统响应如图5所示。
传统与专家模糊的原始PID参数均为0.6、0.004、30。从图5中可以看出:对于阶跃式输入,专家模糊PID控制比传统单纯依靠PID控制的控制器有着更好的动态特性,无超调值,且收敛时间较快;专家模糊PID具有快速的升温速率,当接近预设值(600℃)时,专家模糊控制系统出现了“刹车”现象。即系统开始时,以更快的速度接近预设值,在临近预设值时,突然将响应速率降低;在避免超调现象的同时,提高了系统的收敛时间,满足生物炭炭化炉的理论要求。
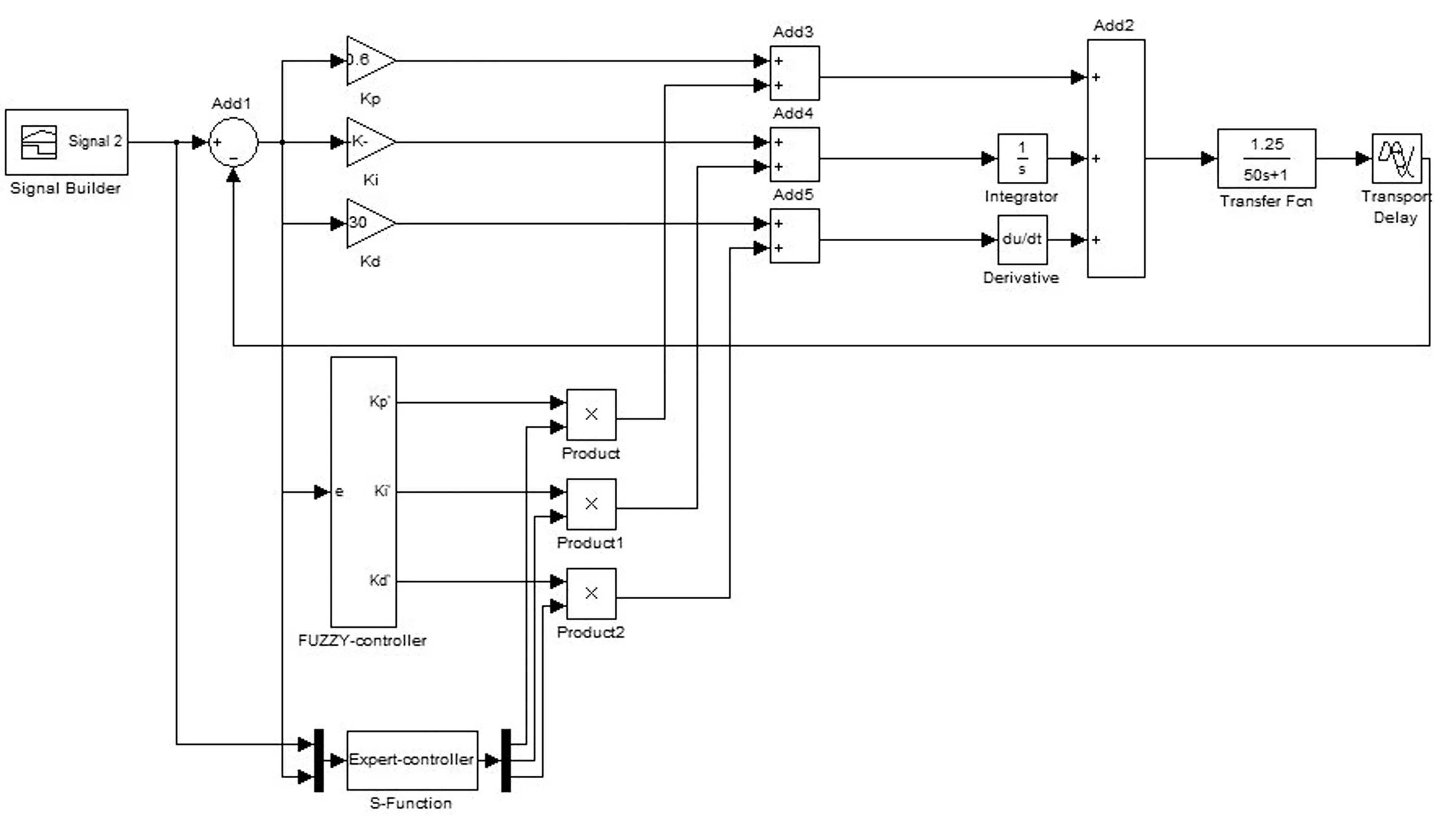
图4 温控系统仿真图
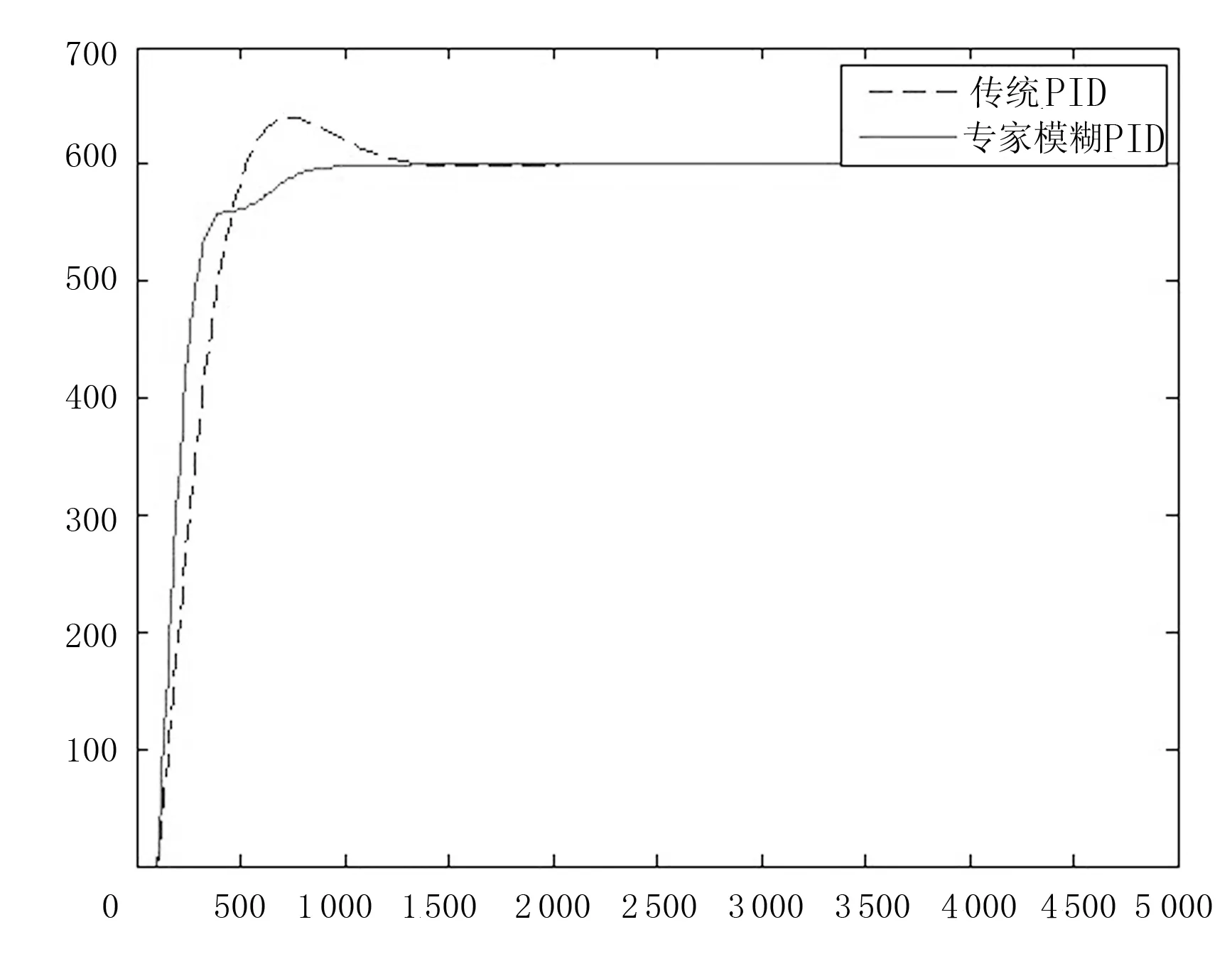
图5 阶跃型输入情况下系统响应
大斜率一阶上升型输入情况下系统响应如图6所示。

图6 大斜率一阶上升型输入情况下系统响应
PID初始参数同上,输入模拟升温速率为1℃/s,终温为500℃的控制信号。图6上显示出专家模糊PID控制比传统PID控制有更好的响应曲线,可以更好地跟踪输入信号,保证响应斜率。在最后阶段,由于误差变化率较大,因此出现“刹车”现象,从而避免了超调。设定升温速率越快,“刹车”效果越剧烈,但由于ZO隶属函数为高斯型且宽度较窄,所以不会发生“刹车过头”(响应曲线出现跌落现象)。
小斜率一阶上升型:输入信号为0.3℃/s,终温为600℃。由图7可以看出:专家模糊PID控制的Ⅱ阶段(收敛跟踪阶段)持续时间明显较长且响应信号斜率平稳,更加符合炭化要求。在传统PID控制中,对于一阶上升信号,输入斜率越高,跟踪信号的斜率与超调量就越不能兼得。若要保证斜率,则一定会产生超调现象;若要避免超调,则跟踪信号斜率会较低。
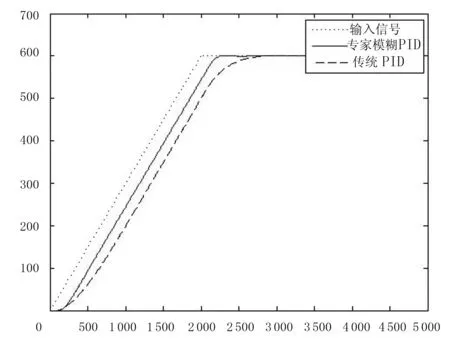
图7 小斜率一阶上升型输入情况下系统响应
如若系统发生超调现象,通过专家控制,该系统可以自我调节量化因子大小,通过几次重复性实验,使得该控制系统可以满足炭化要求。该系统通过两次重复实验自动调节模糊控制器的输出,第3次达到炭化要求,如图8所示。
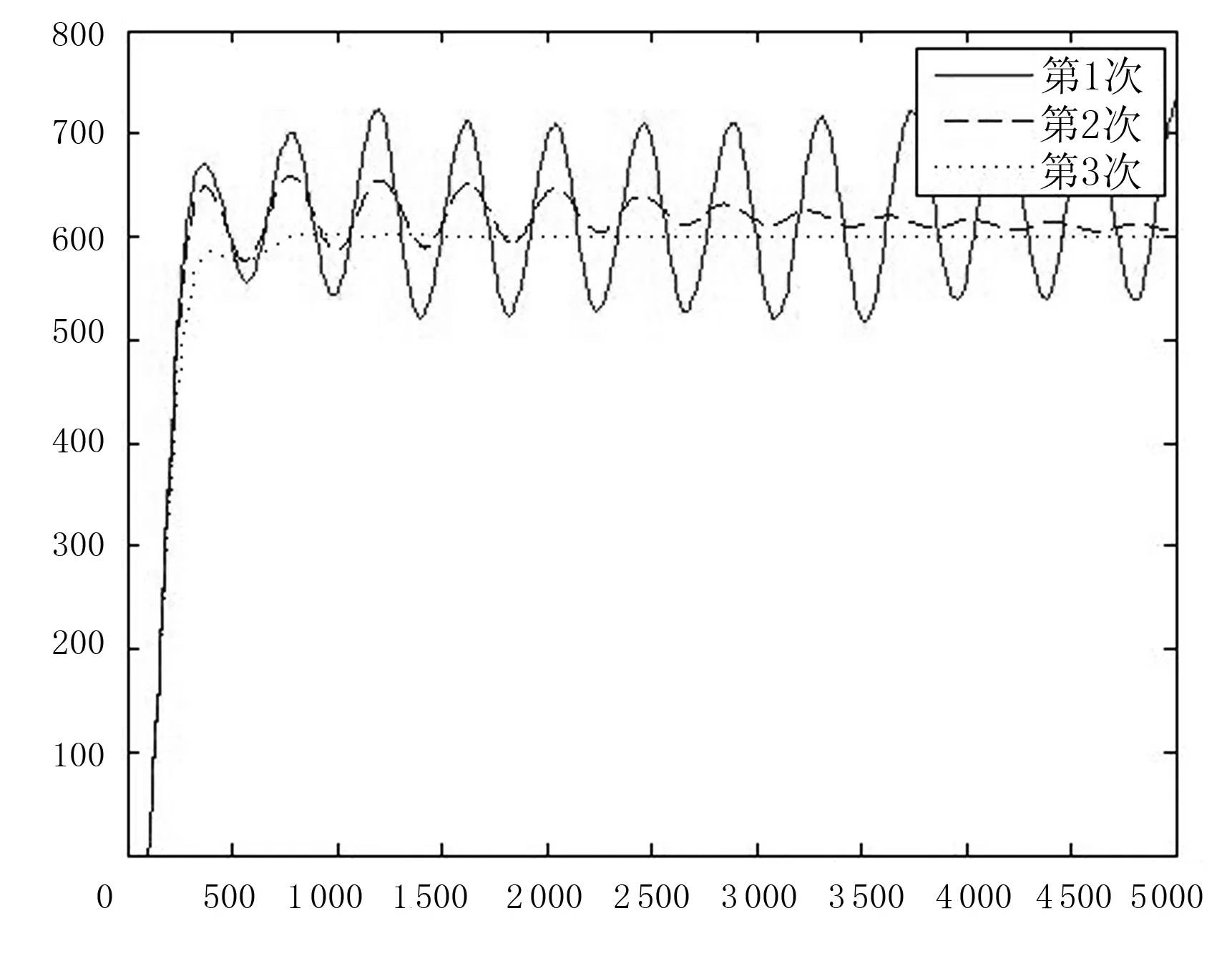
图8 专家系统调节下的阶跃输入响应
4 结论
设计了一款基于专家模糊PID控制的生物炭炭化炉,通过仿真验证其对于阶跃信号、一阶上升信号均具有很好的跟踪特性,实现了生物炭的精确制备,为生物炭的制取与定性分析实验提供了强有力的工具。模糊PID控制器简单、实用、鲁棒性强,满足工业领域的动态要求。引入专家控制既可以在保护设备的同时避免系统发生温度超调,也可使该控制器具有自我调节功能。
[1] 高胡锦晖,胡大斌.PID参数模糊自整定控制器的设计与仿真研究[J].海军工程大学学报,2005(1):97-100.
[2] 刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社, 2011:270-297.
[3] Harder B.Smoldered-Earth Policy:Created by Ancient Amazonian Natives,Fertile,Dark Soils Retain Abundant Carbon[J]. Science News, 2006,169:133-143.
[4] Lehmann J. A Handful of Carbon[J]. Nature, 2007, 447: 143-144.
[5] 陈森. 生物质热解特性及热解动力学研究[D].南京:南京理工大学,2005.
[6] V.A.Oliveira, L.V.Cossi, M.C.M.Terxeira. Synthesis of PID controllers for a class of time delay systems[J].Automatica, 2009, 45(7):1778-1782.
[7] K.S.Tang,K.F.Man,G.Chen,S.Kwong.An Optimal Fuzzy PID Controller[J].IEEE Transactions on Industrial Electronics,2001, 48(4):1104-1110.
[8] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报, 2000(3):47-50.
[9] G.J.Silva,A.Datta,S.P.Bhattacharyya. Structure and Synthesis of PID Controllers[M].London:Springer-Verlag Press,2000.
[10] 张兴权.热解炭化炉:中国,CN200620028222.5[P].2006-01-26.
[11] 周永宏.秸秆炭化炉:中国,CN200830026230.0[P].2008-04-11.
Study on the Carbonization Furnace Based on Expert-fuzzy PID Controller
Zhang Zhixiaa, Xia Lingzhia, Wang Yongganga, Chen Wenfub, Meng Junb
(a.College of Information and Electrical Engineering; b.Agronomy College, Shenyang Agricultural University, Shenyang 110866,China)
The characteristic parameter of the heating furnace is influenced by the load or the interference, which has the features of time varying, large delay, large inertia, and certain nonlinearity. Biochar as a new soil amendment and the effective medicine for the mitigation of global greenhouse effect has attracted the interest of researchers all over the world, and the carbonization furnace for producing biochar is a special kind of heating furnace, which not only requires the precise temperature control to avoid overshoot, but also need to control the heating rate that is difficult challenge of the design of the furnace. In this paper, the expert-fuzzy PID controllor is adopted to achieve the precise preparation of biochar. And basing on the Matlab/simulink, it is verified that this kind of expert-fuzzy PID controller is meeting to requirements of the high accuracy and no overshoot for producing biochar.
carbonization equipment; fuzzy controller; expert controller; PID
2016-01-26
公益性行业(农业)科研专项(201503136);辽宁省重点科技攻关项目(2015103031);中国博士后科学基金会(2015M571328)
张志霞(1976-),女,山东淄博人,副教授,硕士生导师,(E-mail)syzzx7@163.com。
孟 军(1977-),男,沈阳人,教授,博士生导师,(E-mail)mengjun1217@163.com。
S216;TP18
A
1003-188X(2017)02-0204-06
