自主导航果园作业机器人设计——基于自适应遗传算法和样条曲线
2017-12-16李斌,李慧,葛蓁
李 斌,李 慧,葛 蓁
(1.重庆电子工程职业学院,重庆 401331;2.焦作师范高等专科学校 理工学院,河南 焦作 454000;3. 武汉工商学院 信息工程学院,武汉 430200)
自主导航果园作业机器人设计
——基于自适应遗传算法和样条曲线
李 斌1,李 慧2,葛 蓁3
(1.重庆电子工程职业学院,重庆 401331;2.焦作师范高等专科学校 理工学院,河南 焦作 454000;3. 武汉工商学院 信息工程学院,武汉 430200)
为了提高果园精细作业的自动化程度、降低作业成本、推动机器人产品的应用,设计了一种新的果园作业和管理的履带式移动机器人,并提出了一种基于自适应遗传算法和样条曲线的机器人自主导航算法,开发了基于VC++6.0编程的机器人PC控制器。机器人通过对位置角速度和姿态角速度的标定,在控制器中对信号进行处理,并发出控制信号,提高了机器人轨迹控制的精度。对果园作业机器人进行了测试,结果表明:果园机器人在不平整路面上的作业稳定性较好,将速度控制在0.15m/s时,机器人在20m的行驶过程中,其横向最大偏差仅为0.016m,控制精度较高,对果园复杂地形的适应能力较强,满足了果园作业机器人的设计需求。
果园作业;机器人;自主导航;自适应遗传
0 引言
果园机器人的作业对象和工作环境具有较高的不确定性,给其设计带来了较大的挑战,尤其是给实际应用带来了较大的困难。由于果树枝叶生长方向各向的不确定性,使机器人较难实现自主导航;在果园喷洒农药时,较难实现均匀喷药;在果实成熟需要采摘时,也有一系列的问题需要解决,而在山地果园作业时,还需要提高机器人的自适应能力。综合上述问题可知:在果园机器人进行作业时,需要一种可编程控制的综合作业和管理机器人,以提高机器人作业的自动机化程度,这对于实现果园的精细化作业具有重要的意义。
1 导航机构和自适应编码设计
常用果园作业机器人的移动结构主要有3种,包括轮式、履带式和复合式。其中,轮式机器人具有质量小、结构简单、控制方便、移动灵活及工作效率高等优点;但其运动的稳定性和作业环境及路况有关,在复杂的果园地形上,如何实现作业轨迹的精确操作,是果园机器人研究重点。本次研究采用履带式机器人,其虽然移动较慢,但对土壤的保护性较好,越障平稳,具有自动复位的功能。机器人的初始导航结构如图1所示。
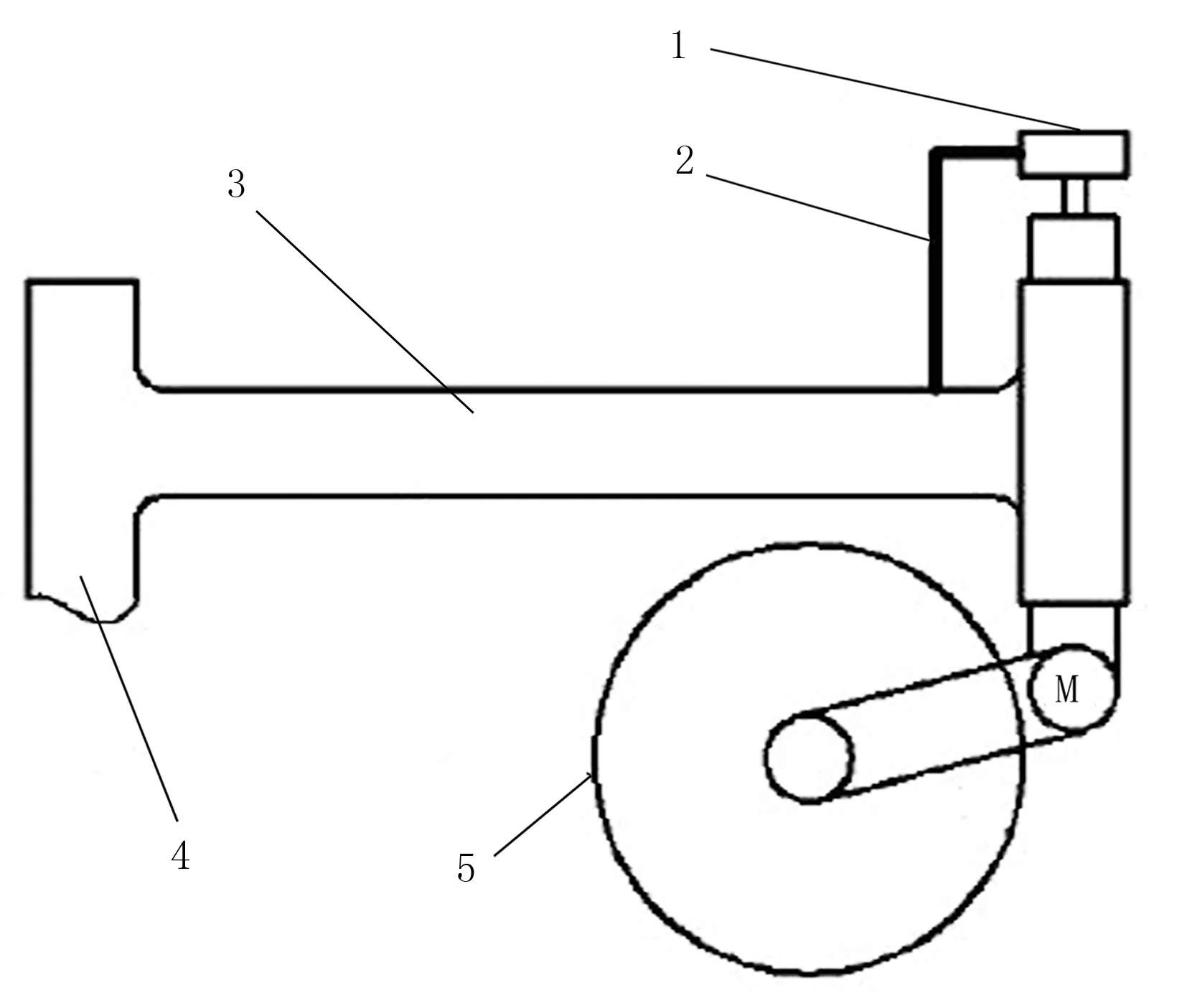
1.角度传感器 2.传感器固定装置 3.连接轴 4.果园机器人本体 5.导向轮
导航轨迹和机器人实际行进的偏差使用传感器来测量,然后根据测量值对位姿进行测算。虽然这种机器人导航结构简单,位姿也容易推算,但是机器人的导航只能在很小的角度内进行。因此,对导航机构进行了改进,得到了如图2所示的导航机构。
改今后的机器人增加了姿态角传感器和位置角传感器,可使机器人在较大的角度内进行导航。当机器人在不平坦的果园地面工作时,机器人产生的上下摆动会对机器人的稳定性造成影响,而调节架可使导向轮和导向管稳定地结合,降低摆动对机器人的影响。
图3为果园作业机器人的控制系统的示意图。机器人利用电位传感器得到导向机构的位姿偏差,利用数据采集卡把采集得到的模拟量转换为数字量;数字量经过PC机处理后,控制电机系统实现机器人的跟踪。
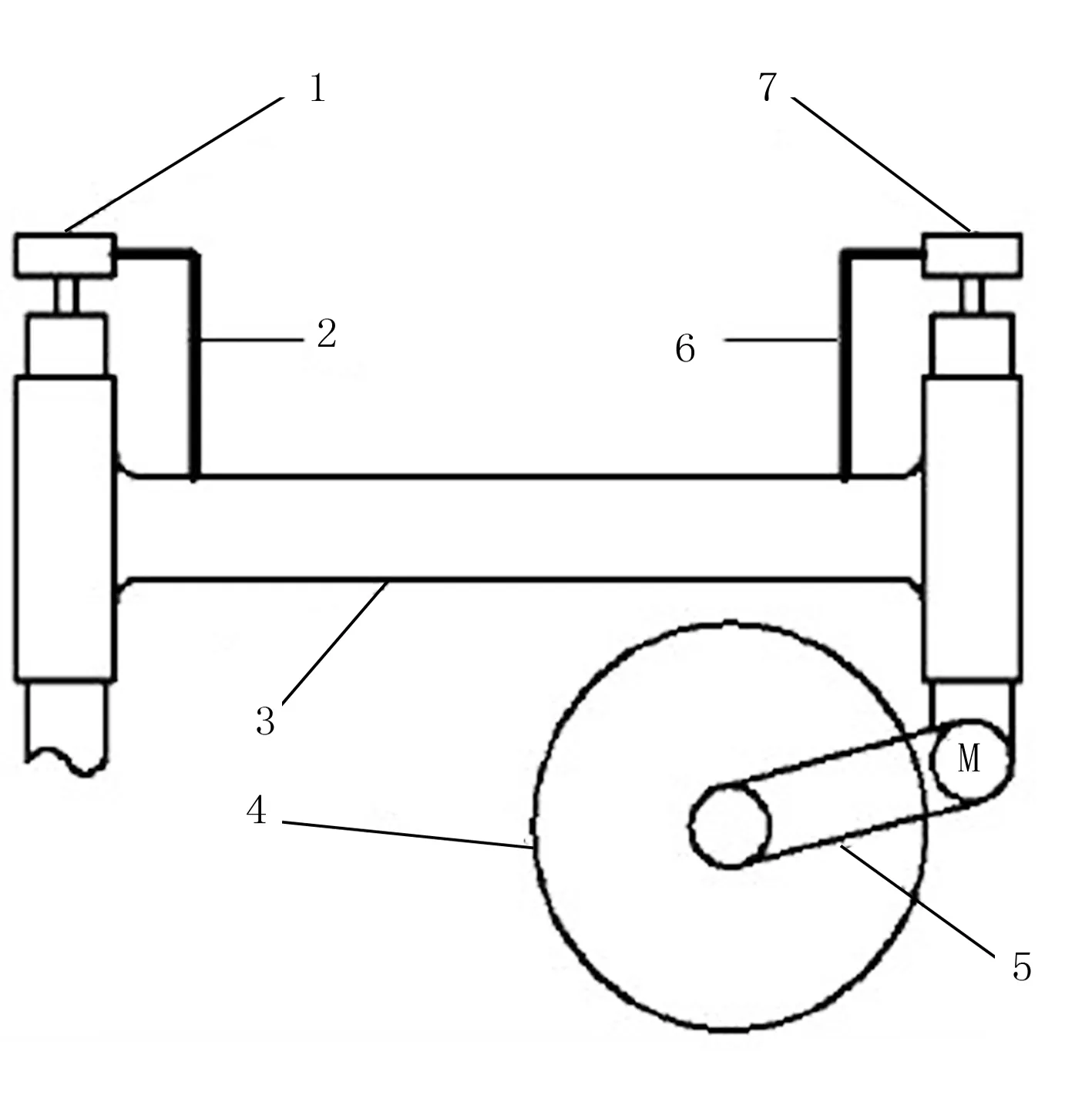
1.姿态角传感器 2、6.传感器固定装置 3.连接轴 4.导向轮 5.调节架 7.位置角传感器

图3 果园作业机器人控制系统
PC机对机器人导航系统控制采用VC++编程的方式,通过编码实现系统的自动化控制,主要流程如图4所示。在程序的编制过程中,主要考虑对系统各种构件的保护,因此当导航位置角和姿态角大于一定数值时,机器人需要具有自动停止的功能,控制器输出的电机PWM控制值也需要在一定的范围之内。根据传感器滤波和信号采集及信号传输与控制所需要的时间,机器人1个导航周期设定为100ms。
图5为机器人电机控制的结构示意图。机器人两侧履带分别用一个直流伺服电机驱动,上位机利用串口和Modbus 控制卡连接,控制卡可以同时控制左侧和右侧两路电机驱动器,来控制伺服电机的动作。上位机和Modbus控制卡采用Modbus工业通信协议。
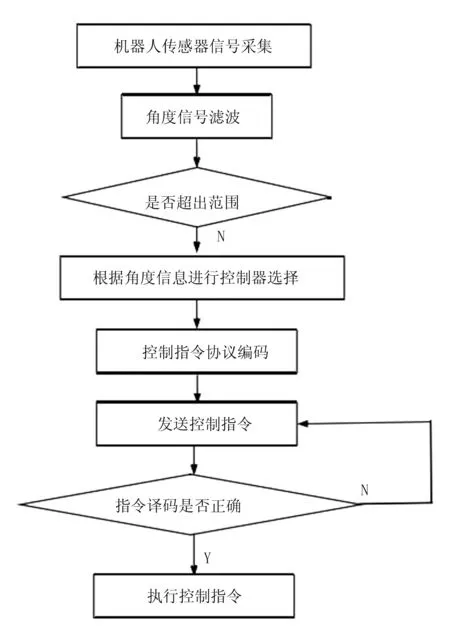
图4 机器人导航编码流程示意图
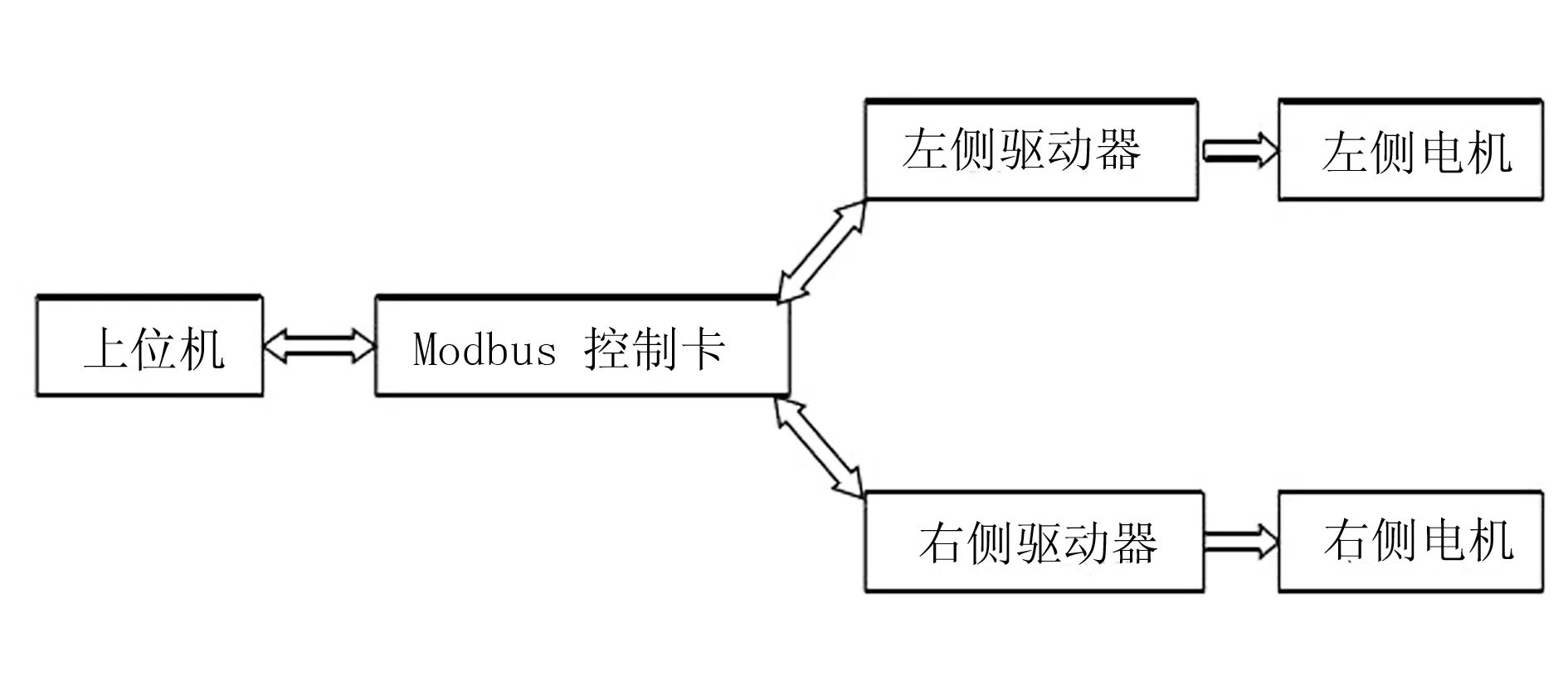
图5 电机控制结构图
2 基于自适应的遗传算法和样条曲线轨迹规划和导航
果园作业机器人的自主导航主要依赖于运动路径的规划。机器人运动规划一般分为两种方法:一种方法是轨迹规划,另一种方法是路径规划。路径规划一般是机器人按照某一性能指标搜索得到最优的规划路径;而轨迹规划是指机器人的各个节点在空间坐标上形成时间序列,包括位移、速度和加速度等。为了使机器人轨迹规划更加精确,引入了三次多项式插值的方法。考虑果园作业机器人在一定的时间内从初始位姿移动到目标位姿问题,首先利用逆运动学原理,求出起始位置和终止位置的位移;然后求解机器人通过初始位置和终止位置的光滑函数,将机器人在初始位置和终止位置的速度设置为0,将时间设定为自变量,利用三次多项式进行拟合,保证机器人移动速度的连续性。其中,三次多项式的表达式为
θ(t)=a1t3+a2t2+a3t+a4
(1)
其中,θ为广义坐标;t为时间;a为三次多项式的系数。初始和终止的约束条件为
(2)
其中,T为一个周期内机器人控制的总时间。因此得到三次多项式的计算系数为
果园作业机器人路径规划最短的样条曲线优化目标函数可以写成

(4)
(5)
假设机器人第部分的关节角速度为
(6)
则有
(7)
其中,q′和t′的数值由控制位置的横坐标和纵坐标决定,对x′值进行优化会直接影响t′值的大小,最大角速度发生的位置在ti或者(ti,ti+1)区间,则
(8)

1)确定群体的规模、变量维数、交叉概率、变异概率、集散因子和迭代次数,确定型值点;
2)求出型值点,计算机器人的移动控制点;
3)利用自适应编码的方法建立初始种群;
4)计算机器人每条染色体对应的时间控制点;
5)利用样条曲线计算染色体对应的速度、角速度、角加速度、角加加速度和关节力矩对应的数值,并判断数值是否超过约束的范围;
6)计算机器人移动本体的适应度值,按照适应度的大小进行排序;
7)计算种群的平均适应度值,并将此作为阈值,选取最大的平均适应度个体,加入子代个体;
8)将机器人移动速度较低的个体和优秀个体进行交叉,替代适应度较低的个体,使个体在约束范围内,并自动加入到子个体中;
9)通过自适应遗传算法确定交叉和变异的概率;
10)进行交叉和变异,产生下一代种群;
11)计算个体适应度的最大值,判别适应度值的范围,选取适应值较大的值,来替代种群中较差的染色体;
12)当满足终止条件时,停止计算;否则,进入步骤4),直到计算停止。
3 果园作业自主导航机器人性能测试
为了验证自适应遗传算法和样条曲线自主导航的精度,设计了果园作业机器人的试验样机。试验样机机器人本体包括机械本体和控制箱:控制箱主要由伺服电机、控制卡、电机驱动器和计算机组成,导航机构主要由位置角传感器、机器人姿态角传感器和连接轴组成。在进行试验时,在果园中预先铺设导航管道,按照机器人作业路线铺设导航管道行进。管道材料采用橡胶材质,橡胶管道和导航轮进行啮合,共同组成曲柄滑块机构。连接轴为连杆,通过检测连接轴的电位传感信号,对机器人相对于轨道的位姿进行检测;利用控制器驱动机器人两侧履带,通过控制速度,使机器人按照预设轨道行驶,实现机器人的自主导航功能。
图6为机器人实验测试的样机模型。试验地点选择在不平的路面上,由于果园里两行果树的平均行距一般为4m,所以将轨道的距离铺设为4m。本测试采用上海海智生产的电阻式角度传感器,传感器的型号为 WDJ22A-1-2K,结构如图7所示。WDJ22A-1-2K传感器的有效角度达到了340°,抗干扰性较强,输出信号稳定而平滑,分辨率很高。
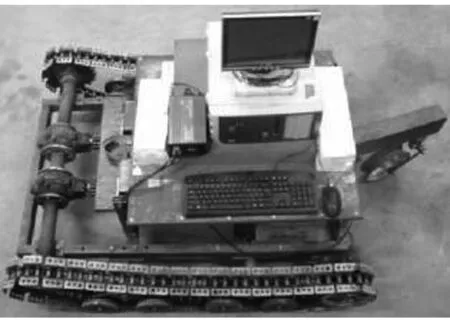
图6 机器人样机试验模型

图7 数据采集传感器
图8为机器人轨迹跟踪过程测得的误差曲线。其主要用于对机器人的横向偏差进行了行驶距离偏差测量,机器人的行驶速度控制在0.15m/s。由测试结果可以看出:机器人在20m的行驶测试过程中,使用自适应遗传算法和样条曲线对轨迹进行控制后,其横向的最大偏差仅为0.016m,控制精度较高,满足果园作业机器人的设计需求。
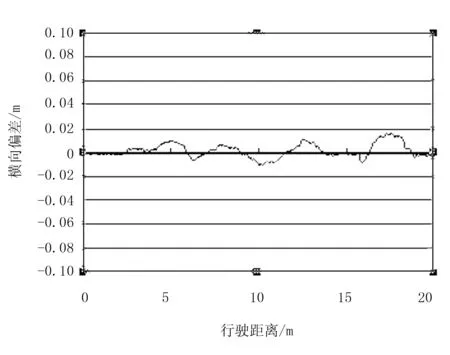
图8 机器人横向偏差测试曲线
4 结语
基于自适应遗传算法和样条曲线,利用VC++编程软件和PC处理器,设计了一种新的果园履带式作业管理机器人,提高了果园精细化作业的自动化程度。对机器人进行了测试,并在编程过程中使用了自适应遗传算法和样条曲线对轨迹进行了优化,对位置角速度和姿态角速度进行了标定。测试结果表明:利用PC处理器可以发出稳定的速度控制信号,提高了机器人控制的稳定性。由位移结果可以看出:机器人在20m的行驶测试过程中,其横向的最大偏差仅为0.016m,控制精度较高。由于计算条件的限制,研究了机器人横向的最大偏差,在后续的进一步研究中,需要对机器人的多种移动和控制性能进行考察,全面优化机器人的性能,使其可以合理地投入到果园作业机器人的市场中。
[1] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[2] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[3] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35(8):30-34.
[4] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[5] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014,34(7):1-7.
[6] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41 (7): 368-370.
[7] 张二鹏,马锃宏,耿长兴,等.温室悬挂喷施机跨垄作业控制系统设计[J].中国农业大学学报,2013,18(6): 170-174.
[8] 马锃宏,李南,李涛,等.钵体苗带式供苗移栽机的设计与试验[J].中国农业大学学报,2015,20(3):216-222.
[9] 张春龙,黄小龙,刘卫东,等.苗间锄草机器人信息获取方法的研宄[J].农业工程学报,2012,28(9): 142-146.
[10] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
[11] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农机工程,2013(6):10-13.
[12] 吴岩,杜立宇,高明和,等.农业面源污染现状及其防治措施[J].农业环境与发展,2011(1):64-67.
[13] 杨慧,刘立晶,刘忠军,等.我国农田化肥施用现状分析及建议[J].农机化研究,2014,36(9):260-264.
[14] 张霞,蔡宗寿,李欢.我国化肥生产能源消费现状分析[J].现代化工,2014,34(10):12-15.
[15] 付丽霞,李云乐.农业面源污染的现状、问题及对策探析[J].食品安全质量检测学报,2014,5(7): 2285-2289.
[16] 栾江,仇焕广,井月,等.我国化肥施用量持续增长的原因分解及趋势预测[J].自然资源学报,2013, 28(11):1869-1878.
[17] 沈德军.农作物叶面施肥的意义、机理及技术要点[J].安徽农学通报,2012,18(12):111-112.
[18] 鱼彩彦.叶面施肥技术在农业生产中的应用[J].农业与技术,2013,33(12):30.
[19] 曹莹,王秀英,孟军,等.秸秆利用现状及其生物炭化前景探析—以辽宁省彰武县为例[J].作物杂志,2012(4):9-12.
[20] 谢文艳,樊贵盛,周怀平.秸秆还田方式对旱地玉米产量和水分利用效率的影响[J].农业机械学报,2011,42(11):60-67.
[21] 慕平,张恩和,王汉宁,等.不同年限全量玉米秸秆还田对玉米生长发育及土壤理化性状的影响[J].中国生态应用学报,2012,20(3):291-296.
[22] 赵伟,陈雅君,王宏燕,等.不同秸秆还田方式对黑土土壤氮素和物理性状的影响[J].玉米科学,2012,20(6):98-102.
[23] 郑建斌.秸秆还田对水稻产量与土壤性状的研究初探[J].中国农业信息,2012(11):55.
[24] 杨滨娟,钱海燕,黄国勤,等.秸秆还田及其研究进展[J].农学学报,2012,2(5):1-4.
[25] 孔德刚,张超,张帅,等.秸秆深施机单体设计及秸秆深施装置的试验研究[J].东北农业大学学报,2013,44(2):115-120.
[26] 杨林,杨斌,康金波.SGTN-160 型灭茬旋耕起垄机的研发简介[J].农业机械,2009(6):86-87.
[27] 戴飞,张锋伟,赵春花,等.快速腐熟秸秆还田机设计与试验[J].农业机械学报,2010,41(4):47-51.
[28] 王文明,王春光.弹齿滚筒捡拾装置的研究与发展[J].农机化研究,2012,34(10):221-225.
[29] 王庆惠,王学农,陈发,等.滚刀式秸秆粉碎装置的设计及实验研究[J].新疆农业科学,2012,49(2): 279-284.
[30] 孔德刚,翟利民,刘立意,等.秸秆深施还田历经时间对蓄水效果的影响[J].东北农业大学学报,2013,44(5):90-97.
Design of Autonomous Navigation Orchard Operating Robot Based on Adaptive Genetic Algorithm and Spline Curve
Li Bin1, Li Hui2, Ge Zhen3
(1.Chongqing College of Electronic Engineering, Chongqing 401331,China; 2.College of Science and Technology, Jiaozuo Teachers College, Jiaozuo 454000, China; 3. School of Information Engineering, Wuhan Technology and Business University, Wuhan 430200, China)
In order to improve the automation level of the orchard fine work, reduce the operating costs, and promote the application of robot products, a new type of robot is designed, and an autonomous navigation algorithm based on adaptive genetic algorithm and spline curve is proposed, which is based on VC++6.0 programming. In the controller, the robot is processed by the signal in the controller, and the control signal is sent out to improve the accuracy of robot trajectory control. The test results can be seen from the test results, the stability of orchard robot on uneven pavement is better, and the speed control in 0.15m/s, the maximum deviation of the robot is 0.016m, the control precision is high, and the adaptive ability of orchard complex terrain is strong.
orchard operation; robot; autonomous navigation; adaptive genetic algorithm
2015-12-16
重庆市教委科学技术研究项目(KJ1402909);武汉工商学院科学研究项目(A2015005)
李 斌(1981-),男,重庆人,实验师。
葛 蓁(1983-),女,河南商城人,讲师,硕士,(E-mail) gezhen1983@sina.cn。
S225.93;TP242
A
1003-188X(2017)02-0047-05
