一 种 新 型 金 属 探 测 小 车 的 研 制
2017-12-15李万兵
李万兵, 黄 健
(西京学院 机械工程学院, 西安 710123)
一种新型金属探测小车的研制
李万兵, 黄 健
(西京学院 机械工程学院, 西安 710123)
设计了一个自动金属探测的移动小车。采用LDC1000电感数字传感器作为金属探测传感器,传感器连接自制的电感线圈,当金属物靠近线圈时,传感器输出的数字量将会发生明显的变化,通过硬件SPI接口将数据送给STM32进行处理显示。自制线圈可将探测的有效距离提高到10 cm。以STM32作为主控,设计了电机驱动电路和蓝牙通信电路,通过手机可遥控小车的行驶,检测到金属时有声光报警提示。测试结果表明,手机遥控有效遥控距离达到10 m,能够探测到直径为0.6 mm的细铁丝,以及比它更大的金属,金属面积越大,效果越明显。
金属探测; 移动小车; 感测技术
0 引 言
电感感测技术是一种无接触、低功耗的感测技术,在工业生产和实验研究中得到了广泛的应用。目前常用的电感感测技术,应用电磁感应物理原理检测金属物品,但大多数输出是模拟信号,要经过放大、滤波、A/D采集才可接入微处理器进行处理,因此存在误差大、精度差等缺点。
为有效解决该问题,本文提出采用新型数字电感传感器LDC1000作为传感器,通过在印制电路板(PCB)上绘制一个电感线圈或用细铁丝绕制线圈的方法,实现对金属物的检测,小到0.6 mm的细铁丝。LDC1000输出28位的数字量,可用SPI串行总线方便地与各种微处理器连接,达到采集和处理的目的。28位的数字量可实现对金属物高分辨率、高精度检测,广泛应用在灰尘、污垢、油和潮湿环境中,实现线性角位置、位移、运动、压缩、振动、金属成分检测,以及汽车、消费、计算机、工业、医疗和通信在内的很多其他应用的高精度测量[1-5]。
1 系统设计框图
系统设计框图如图1所示。图中主控采用STM32F103ZET6,该处理器共有3个硬件SPI接口、8个定时器、3个串口、144个引脚,是基于Cortex M3的32位微处理器,功能强大,资源丰富。LDC1000通过固定在小车底部自制的电感线圈检测金属,当检测到金属物后通过硬件SPI2接口将数据快速传递给STM32去处理,STM32将处理后的数据通过硬件SPI1送给3.66 cm TFT真彩屏显示。手机可用蓝牙遥控小车的行驶,采用DRV8825控制电机的行驶,通过底部的电感线圈检测金属物品,由于采用步进电动机,故可以提高小车行驶的准确度和精度。
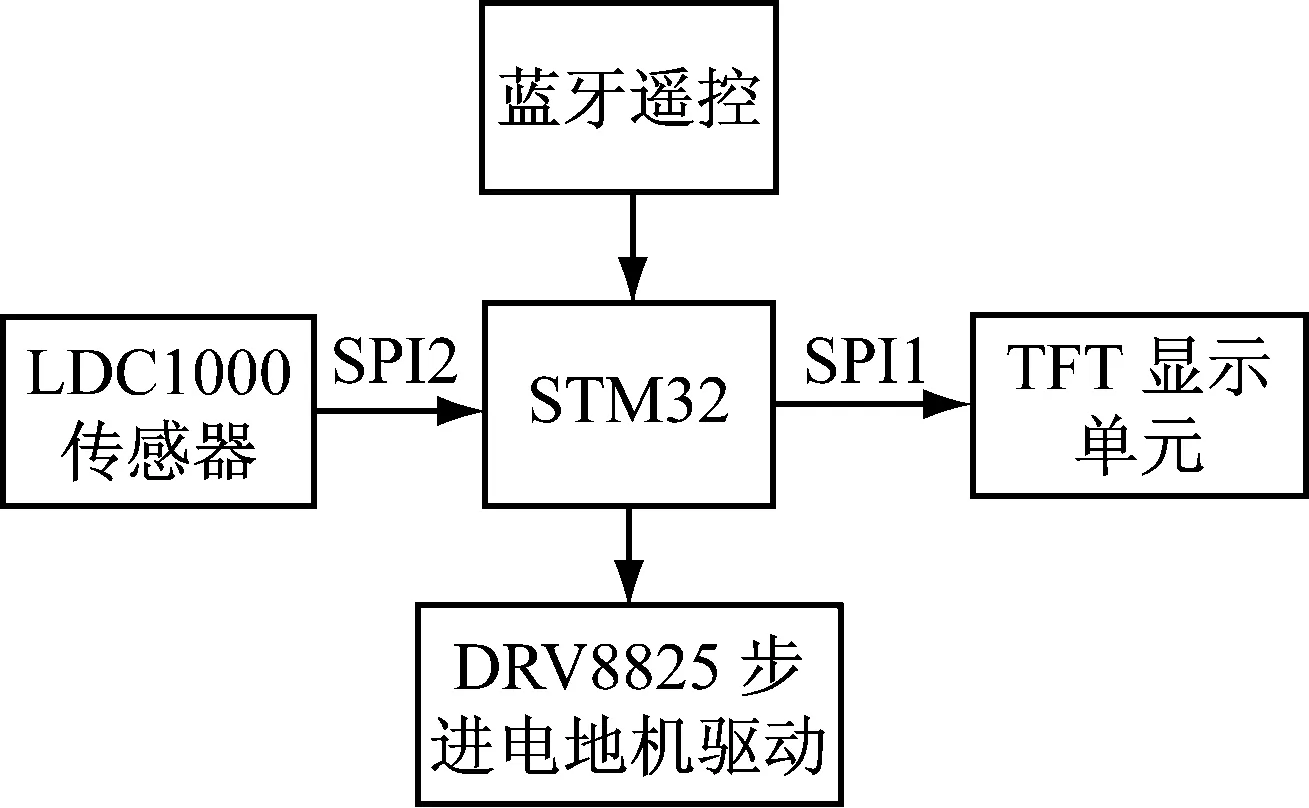
图1 系统框图
2 硬件电路设计
2.1 LDC1000传感器设计
LDC1000原理图如图2所示,图中PB12~PB15、PC9均是STM32F103ZET6的IO口,其中PB12~PB15是硬件SPI2接口。图中:PB12产生SPI2的片选信号SPI2_NSS; PB13产生SPI2的时钟信号SPI2_SCK;PB14产生SPI2的主入从出的数据传送信号SPI2_MISO; PB15产生SPI2的主出从入数据传送信号SPI2_MOSI。以上4条信号线构成硬件SPI2的连接线,完成数据的读写操作[6-7]。 图中PC9通过STM32F103ZET6的定时器产生6 MHz的方波,输入给LDC1 000作为时钟信号,可使硬件SPI2的读写速率达到4.5 MB/s。
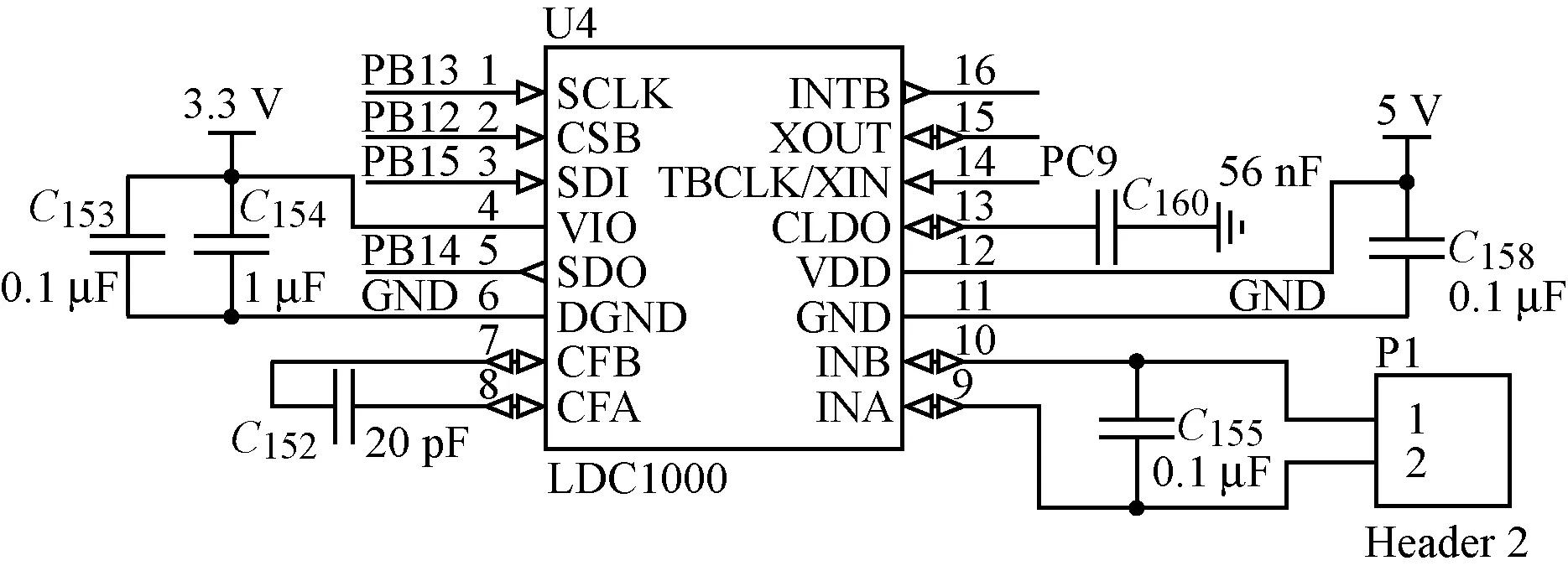
图2 STM32与LDC1 000连接图
自制线圈如图3所示,此线圈是在PCB中绘制的,直径达到10 cm。图中线圈相当于电感,给该电感配置一个合适的电容。当外部有金属物体时,就会产生LC谐振,LC的谐振频率通过下式计算:

(1)
式中:Fsen是LC谐振频率,Fex是外部时钟基准频率,取值为6 MHz;Fcnt是LDC1000内部计数器值;RT是LDC1000内部寄存器设置的响应时间。对式(1)两边分别求倒数,并做适当变化,可得:
RT(1/Fsen)=3Fcnt(1/Fex)
(2)
式中:1/Fsen是LC谐振周期;1/Fex是基准时钟周期。式(2)表明在RT个LC谐振周期内,可使用LDC1000的Fcnt计数器记录基准时钟的个数来推算LC的谐振频率。
根据电涡流原理,检测细小的金属,必须要产生足够大的涡流,就必须增大电感量L。通过多次实验,绘制了直径为10 cm的电感线圈,线的粗细为0.1 mm,电感量为0.270 mH,与其匹配的电容大小为3nF,如图3所示。

图3 PCB下绘制电感线圈
2.2 步进电动机驱动电路设计
DRV8825具有片上1/32微步进分度器,最大电流可达2.5 A,可驱动39、42步进电动机。本设计中采用的是42步进电动机。步进电动机与DRV8825的连接图如图4所示。

图4 DRV8825步进电机驱动电路图
图4中M0、M1、M2是细分选择控制位,当全部为“1”时,得到最高32细分。PE15连接到DIR,控制步进电动机的方向;PE14由STM32F103ZET6的定时器1产生PWM(脉冲宽度调制)波,控制电动机的转速[8]。经实测,驱动42步进电动机时,频率范围在10~28 kHz,频率越高,电动机转速越快。
2.3 TFT显示单元电路设计
TFT显示单元采用5.27 cm SPI接口真彩屏,显示电路设计如图5所示。
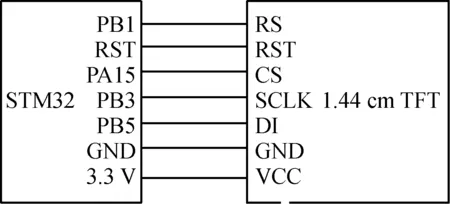
图5 TFT显示电路设计原理图
为提高5.66 cm TFT真彩屏的刷屏速度,采用STM32F103ZET6的硬件SPI1接口与TFT真彩屏相连。因为对TFT液晶屏,只有写屏操作,没有读操作,所以硬件SPI只需要3根线。其中SCLK连接到PB3(SPI1_SCLK);DI连接到PB5(SPI2_MOSI);CS连接到PB12(SPI2_NSS).其余RST为复位信号,GND要共地,VCC接3.3 V。
2.4 蓝牙模块电路设计
蓝牙模块电路设计如图6所示。蓝牙模块通过串口的RXD和TXD可实现数据从接收和发送,将蓝牙模块的RXD连接到STM32F103ZET6的PD5(串口2的TXD)引脚,将蓝牙模块的TXD连接到STM32F103ZET6的P65(串口2的RXD)引脚,通过串口2控制蓝牙模块的收发,可与手机或其他有蓝牙装置的设备通信。无线通信的最远距离可以达到10 m。
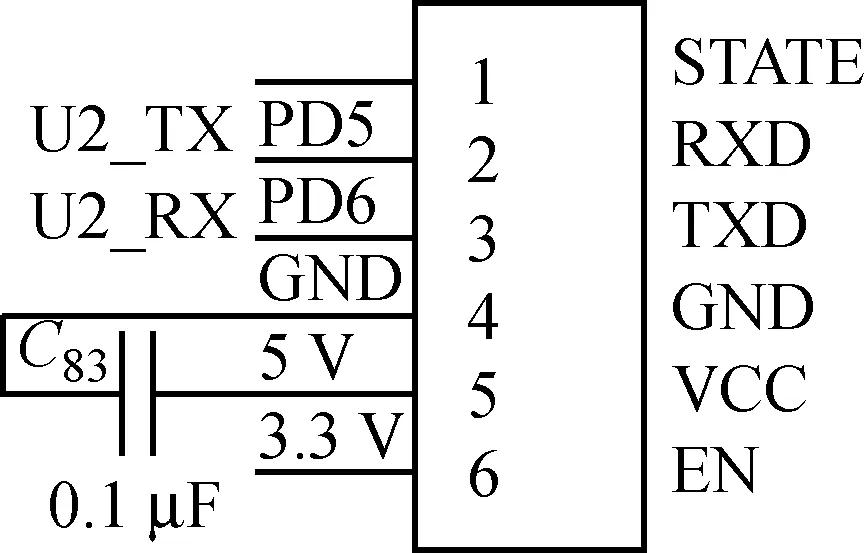
图6 蓝牙通信电路设计
3 软件设计
3.1 软件设计流程图
软件设计流程图如图7所示。首先对定时器、SPI接口进行初始化,然后通过硬件SPI2接口循环采集LDC1000的金属探测值。为了使检测值稳定、可靠。共循环采集50次,进行冒泡排序,去掉最大值和最小值各10个,用剩下的30个求均值,并将结果送给5.27 cm TFT屏显示。同时,小车接收手机蓝牙遥控信息,根据发生的不同字符,控制小车的前进、后退、左转、右转,探测寻找别的金属物品。
3.2 SPI读写时序
为了提高速度,对SPI的读写操作采用硬件方式。设计中LDC1000和3.66 cm TFT均用到了SPI时序,以LDC1000为例,图8中给出了其读写时序[9-10]。
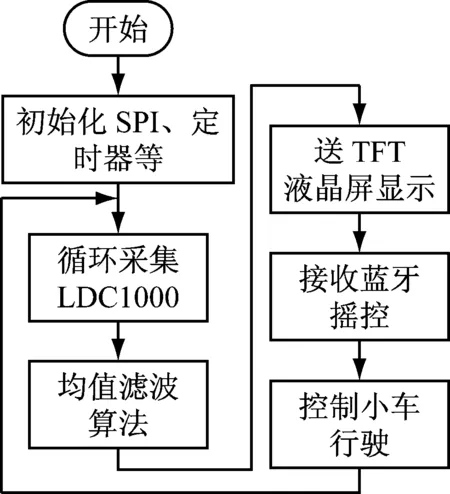
图7 软件流程图

图8 SPI读写时序
图7中,给出了SPI读写1 Byte的时序图,该时序遵循以下步骤[11-15]:
(1) 片选信号CSB置零。
(2) STM32通过SDI向LDC1000写入访问寄存器地址,其中最高位为0,表示写入,最高位为1,表示读出,剩余7位为寄存器地址。
(3) 步骤(2)共用8个SCLK时钟周期,在此期间,SDI处于高阻状态。
(4) 如果命令为读,步骤(1)中最高位为1,表示读出,SDO线上发送来自其地址寄存器的8 Byte。
(5) 如果为写,SDI线接收来自STM32F103ZET6的8位数据,并将其写入相应的寄存器中。
(6) 完成读写后,片选置高,释放对该从机的控制。
4 测试结果
测试分静态测试和动态测试两种。静态测试时,装配并调试好硬件电路,测试1角、5角、1元硬币、细铁丝(直径d=0.6 mm),得到数据如表1所示。
从表1可以看出,距离与频率值之间有一定的对应关系,随着距离的增大,频率值变大。但是因材质和面积的不同,得到的值不同。当面积减小时,变化就非常小,比如细铁丝,当<5 mm时,基本上没有变化。
动态测试时的场地如图9所示。场地周围用0.6 mm的细铁丝围成,将自制线圈安装成距离地面距离为5 mm,从表1中可知,这种情况下效果最好。在场地中随意放置1角、5角、1元硬币若干。
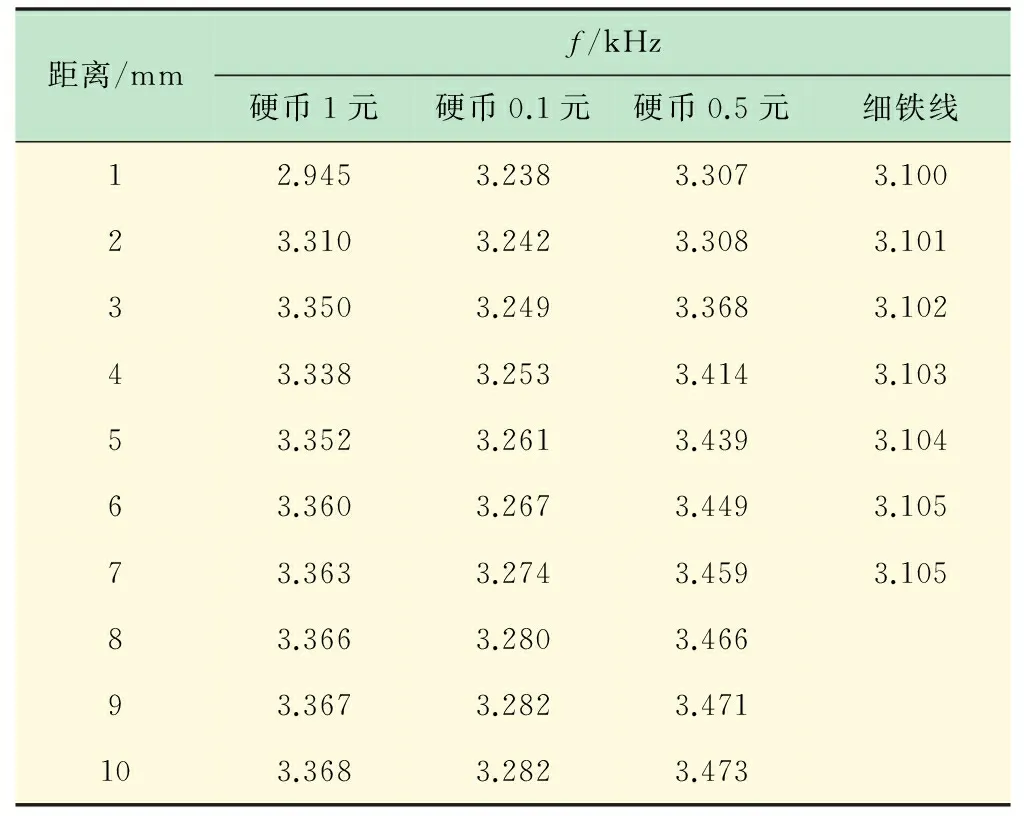
表1 不同金属与频率值之间的对应关系
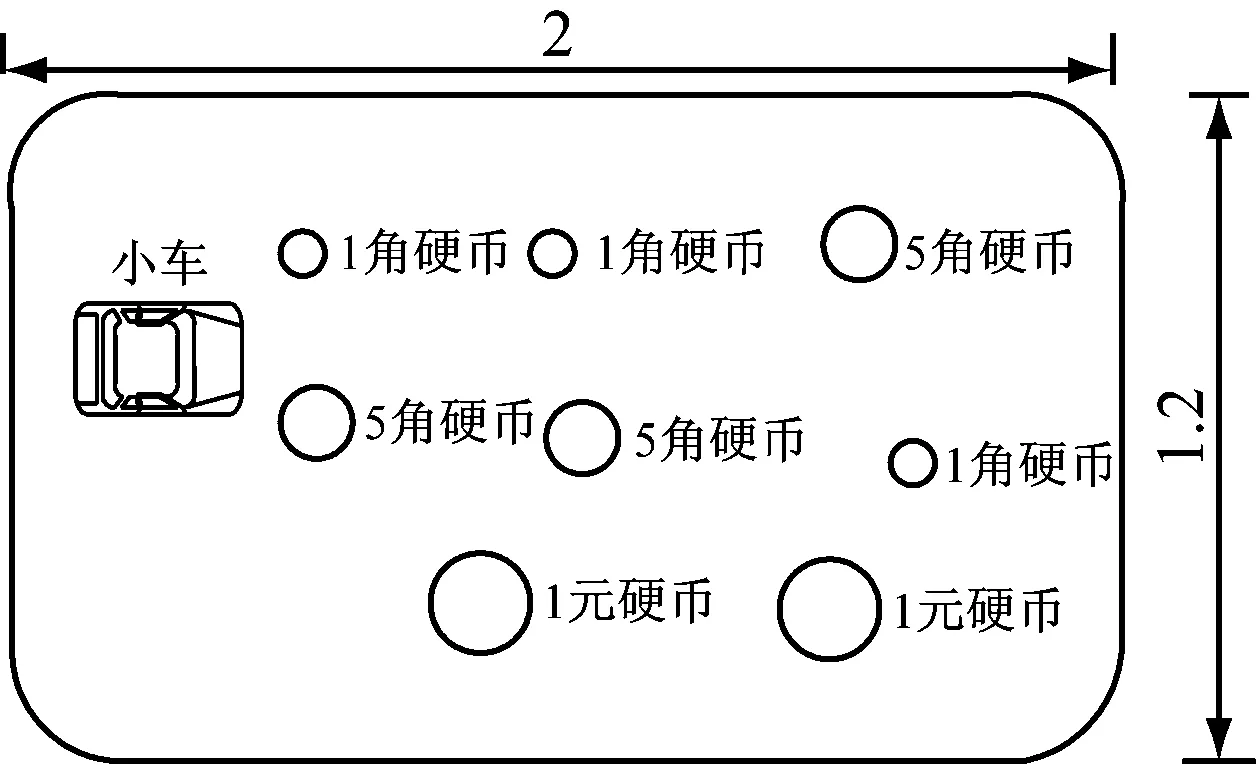
图9 测试场地(m)
动态测试时,将小车随意放在场地中某个位置,用手机遥控小车行驶,分别在空白处、细铁丝处、1角硬币、5角硬币、1元硬币测得的数据与表1所示的数据(距离为5 mm)时的一致。
根据此规律,增大金属的面积或者体积,有效检测距离将会达到提升。当将金属物品换成铝块或者铁块时,有效检测距离可达到10 cm。此外,根据前面所述原理,增大电感量,即将线圈绕制地更大,检测的效果和距离也会进一步提高。
5 结 语
本文采用LDC1000数字电感传感器设计的金属检测装置可实现对金属物体的探测。采用蓝牙遥控小车,可提高探测的范围。也可将LDC1000硬件电路和自制线圈拆下,将其安装在其他设备上,构成其他用途的探测仪。本设计不仅可探测金属,还可探测金属物体的成分和大小,具有一定的实用价值,可应用在灰尘、污垢、油和潮湿等恶劣环境中。
[1] 余炽业, 宋 跃, 雷瑞庭.基于STC12C5A60S2 的智能循迹小车[J]. 实验室研究与探索,2014,33(11):46-49.
[2] 黄 健. 一种新型数字电感传感器的设计与应用[J].计算机测量与控制,2015,23(7):2597-2599.
[3] 黄 健. 基于ARM的数字电感传感器设计[J].宇航计测技术,2015,35(5):57-60.
[4] 黄 健,张善文.基于LDC1614的精密刻度盘设计[J].深圳大学学报(理工版),2017,34(2):188-194.
[5] 司开波,黄 健,吕林涛.多通道数字电感传感器设计[J]. 宇航计测技术,2016,36(1):62-68.
[6] 王子辉,叶云岳.基于CMOS传感器的智能循迹小车图像识别技术研究[J].传感技术学报,2009,22(4):484-488.
[7] 彭建学,叶银忠,侍 尉,等. 基于跨导测量的金属探测方法[J].电测与仪表,2013,50(4):82-85.
[8] 金 立,贾存良,王 梅,等. 基于PIC单片机的智能循迹小车设计[J].工矿自动化,2010(8):129-132.
[9] 莫太平,杨宏光,刘冬梅. 面向多路线的智能循迹小车的设计与实现[J].自动化与仪表,2014(4):6-9.
[10] 贺桂芳. 一种新型智能金属探测仪的设计[J]. 仪表技术与传感器,2016(1):13-15.
[11] 师树恒,赵 斌,郭朋彦,等. 基于MK60N512的智能循迹小车设计[J].机床与液压,2014,42(2):91-96.
[12] 王茹茹,宋开宏,明 军,等. 基于开放线圈系统金属探测仪传感器的特性分析[J].合肥工业大学学报(自然科学版),2015,38(3):354-357.
[13] 宋永献,马娟丽,贺乃宝,等. 基于TMS320F2812的智能循迹小车控制系统设计[J].计算机测量与控制,2011,19(9):2128-2130.
[14] 李艳红, 李自成,孙仕琪. 基于STM32单片机的金属物体探测定位器系统的设计与实现[J].仪表技术与传感器,2016(4):63-66.
[15] 王丽君,马龙升,钟皇平,等.可自主移动的金属物体探测定位仪设计及开发[J].实验技术与管理,2015,32(5):107-110.
ResearchonMetalDetectionCarBasedonLDC1000
LIWanbing,HUANGJian
(School of Mechanical Engineering, Xijing University, Xi’an 710123, China)
A mobile car with automatic metal detection is designed. LDC1000 digital inductance sensor is used as the metal detection sensor, sensor is connected with the inductance coil which is made by authors. When the metal is near the coil, the digital output data sampled by sensor will change greatly, The data are sent to STM32 through the hardware SPI interface for process and display. The coil can effectively improve detection distance to 10cm. STM32 is used as the main control, the motor drive circuit and Bluetooth communication circuit are designed, through the mobile phone the car can be remotely controlled. When some metal has been detection, it will send out sound and light alarm signal. Test results show that the metal detection car can use mobile phone remote control, the effective range is up to 10 m, it can detect 0.6 mm diameter of thin wire, the metal area is larger, the effect is more obvious.
metal detection; mobite car; sensing technology

TP 273
A
1006-7167(2017)11-0087-04
2017-03-03
陕西省教育厅科学研究计划项目(15JK2170); 西京学院基金项目(XJ150110)
李万兵(1985-),男,甘肃会宁人,硕士,讲师,研究方向:智能信息处理。Tel.:13571882719; E-mail:565200245@qq.com