基于RSSI信号强度定位的夜间采摘作业机器人设计
2017-12-15马永兵
马永兵
(南京信息职业技术学院,南京 210023)
基于RSSI信号强度定位的夜间采摘作业机器人设计
马永兵
(南京信息职业技术学院,南京 210023)
为了提高果实采摘机器人在夜间作业的工作效率,提出了一种适用于果实采摘机器人夜间果实定位识别的方法,引入了RSSI信号强度定位技术,并在此基础上提出了一种泰勒级数展开的高精度定位方法。夜间采摘作业机器人采用接收到的RSSI信号强度对待采摘的果树进行定位,为了满足机器人移动时的实时定位,采用多次信道扫描的方式,提高了机器人定位的实时性。为了验证机器人夜间定位方法的有效性和可靠性,在夜间采摘环境下,对机器人的性能进行了测试。通过测试发现:机器人的定位精度较高,错误识别率较低,并且通过多次校正,可以有效提高作业精度,满足夜间作业的设计需求。
RSSI信号强度;果实采摘;泰勒级数;定位精度;实时性
0 引言
中国是一个水果生产大国,水果的采摘劳动作业量占到水果生产过程作业总量的1/3以上,并且在水果成熟期内,需要尽快地摘除,否则会发生腐烂,影响水果的质量。采用机器人进行机械化采摘,不仅可以降低人工成本,还可以提高采摘的精度,降低水果的损失,提高果实的采摘效率。为了满足在水果成熟期快速采摘的目的,尽快完成密集的水果采摘工作,设计时需要机器人不仅在白天可以正常工作,而且也具有夜间工作的能力。
虽然国内外对水果采摘机器人进行了大量的研究,但是对于夜间采摘机器人的研究还涉及较少。为此,本研究主要对采摘机器人的夜间工作模式进行了探索。在夜间作业时,需要机器人准确地识别待采摘果树,且能够自动地移动到果树位置,对水果进行采摘作业。为了提高机器人夜间作业的自主导航和位置识别能力,引入了基于RSSI信号强度定位方法,利用实时定位原理,快速选择信道,从而实现了水果的快速识别,对于提高采摘机器人作业效率和水平具有重要的意义。
1 采摘机器人总体设计
夜间采摘作业机器人的定位系统主要包括盲节点、锚节点、网关板及上位机,如图1所示。其中,网关板负责整个网络的调度;锚节点负责网络的数据传输和转发等功能,是已知位置的节点;盲节点为果树待定位的节点,位置信息最终通过上位机进行数据处理,从而可以精确的得到夜间待采摘果树的位置。

图1 夜间采摘机器人定位系统结构图
图1中,上位机和协调者的节点采用RS232串口进行通信,而协调者和锚节点与盲节点之间采用无线ZigBee进行通信。机器人的结构及夜间作业模式如图2所示。在夜间,受色彩的影响,直接利用机器人视觉对待采摘果实进行定位,效果不好。为了避免采摘夜间环境对采摘效果的影响,设计采用RSSI信号强度定位的方法,如图3所示。机器人的控制核心为PC上位机,可以对位置信息进行处理,并发出定位移动控制指令,驱动系统以轮式驱动为主。
基于信号强度定位主要分为两个阶段,包括离线测量阶段和实时定位阶段。离线测量主要是通过无线强度经验建立数据库,可以具体估算果树的位置。夜间采摘机器人定位的流程如图4所示。

图2 采摘机器人结构和夜间作业模式示意图

图3 采摘机器人RSSI定位系统

图4 采摘机器人夜间作业流程图
上位机运行客户端程序后,启动扫描进程,对信号的信道进行若干次扫描,从而得到待测位置发出的信号强度,并将信号强度值传送给服务器;服务器对接收到的信号强度进行处理,并对每个AP的RSSI平均值进行求解,最后去除数值的噪声,按照大小顺序进行排序。
机器人在行走过程中,需要对待采摘的果树进行实时测量,测量过程是连续的,因此可以进行历史位置的校正。假设机器人移动速度低于0.5m/s时,在几秒钟内,机器人不可能跨越较大的距离,每次定位从概率分布数据库中,选取概率较大的多条记录,根据机器人的历史数据库,排除一些不可能的位置,从而可以缩小定位的范围。
2 采摘机器人RSSI信号强度定位算法
机器人在果园进行采摘作业时,由于作业环境的复杂性,无线信号传输过程会受到影响,特别是障碍物、绕射和多径等因素的存在。因此,普遍采用的传输模型为
(1)
其中,PL(d)表示在信息传输距离为d时的路径损耗;PL(d0)表示单位距离的路径损耗;d0表示单位距离;X0表示均值为0的随机数,该随机数服从高斯分布;n是表示衰减因子,则果树锚点发出定位信号后,机器人接受到信号的强度为
(2)
其中,PR(d)是机器人接收到的信号强度指标,即RSSI;PT表示果树发射信号的功率;GT表示果实锚点发射天线的增益。为了使移动的机器人能够对果树进行实时定位,利用IEEE802.15.4标准对信号衰减模型进行简化,则有
RSSI=
(3)
但考虑到环境、成本、定位精度要求等因素,所以实际测量中测距模型可以进一步简化为
RSSI=-10nlgd-A
(4)
其中,d表示果树发射信号的锚节点和待定位盲节点之间的距离,A表示盲节点和锚节点之间距离为1m时RSSI值。得到了RSSI和d的函数关系,可计算出移动机器人和定位果树之间的实时距离,使机器人可以高效率的定位。
假设果园定位的无线网内有N个已知的果树锚节点,其坐标为(x1,y1), (x2,y2),…,(xN,yN),RSSI测量值为(RSSI1,RSSI2,…,RSSIN),通过式(4)模型可以侧得待测的节点到锚节点的距离d1,d2,…,dN,可以表示为
(5)
在方程进行求解时,可以利用泰勒级数展开进行迭代计算,假设待定位节点的真实坐标是(x,y),于是公式(5)通过处理可得
(6)
(7)
果树的真实位置和近似位置偏移量的和为

(8)
于是有

(9)
利用泰勒级数在近似位置展开,去掉一阶偏导各项可得
(10)
各偏导数经计算为
(11)
(12)
综和上述可得
(13)
整理得
(14)
令
(15)
则式(14)可简化为
Δdi=axiΔx+ayiΔy
(16)
于是可得
(17)
定义
(18)
可以得到
HΔρ=Δd
(19)
用LS求解可得
(20)
3 采摘机器人夜间作业定位测试
为了验证所设计的泰勒级数算法和RSSI定位方法的有效性与可靠性,对机器人夜间的作业效果进行了测试。夜间机器人采摘作业与白天作业有所不同,为了实现机器人的定位,将果树设置为锚节点和盲节点,如图5所示。

图5 夜间果实采摘场景
图5表示夜间果实的采摘场景,将果树中的关键位置布置无线网络节点, E树便是果树定位的已知锚节点。首先对机器人进行测距实验,当实际距离待采摘果树为20m时,通过120次信道的扫描,并每隔20s测试接收信号的强度,最终测定锚节点信号的强度平均值为-15.58dBm,通过公式计算可得距离d=20.18m,精确度为99.91%,定位的精度较高。
图6表示夜间作业精度测试的过程曲线。当实际距离改为40m时,每隔15s测试1次,通过120次信道扫描得到信号强度的平均值为-21.98dBm,计算得到的距离为40.22m,定位精度达到了99.45%,定位精度也非常高。
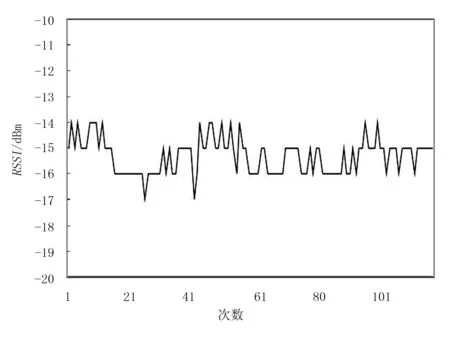
图6 机器人夜间作业定位精度测试
为了提高待采摘果树的识别率,对定位系统进行多次校正,如图7所示。通过3次定位系统的校正,果实的错误识别率都有所降低,在第3次校正时,果树的错误识别率仅为0.003,错误识别率较低。
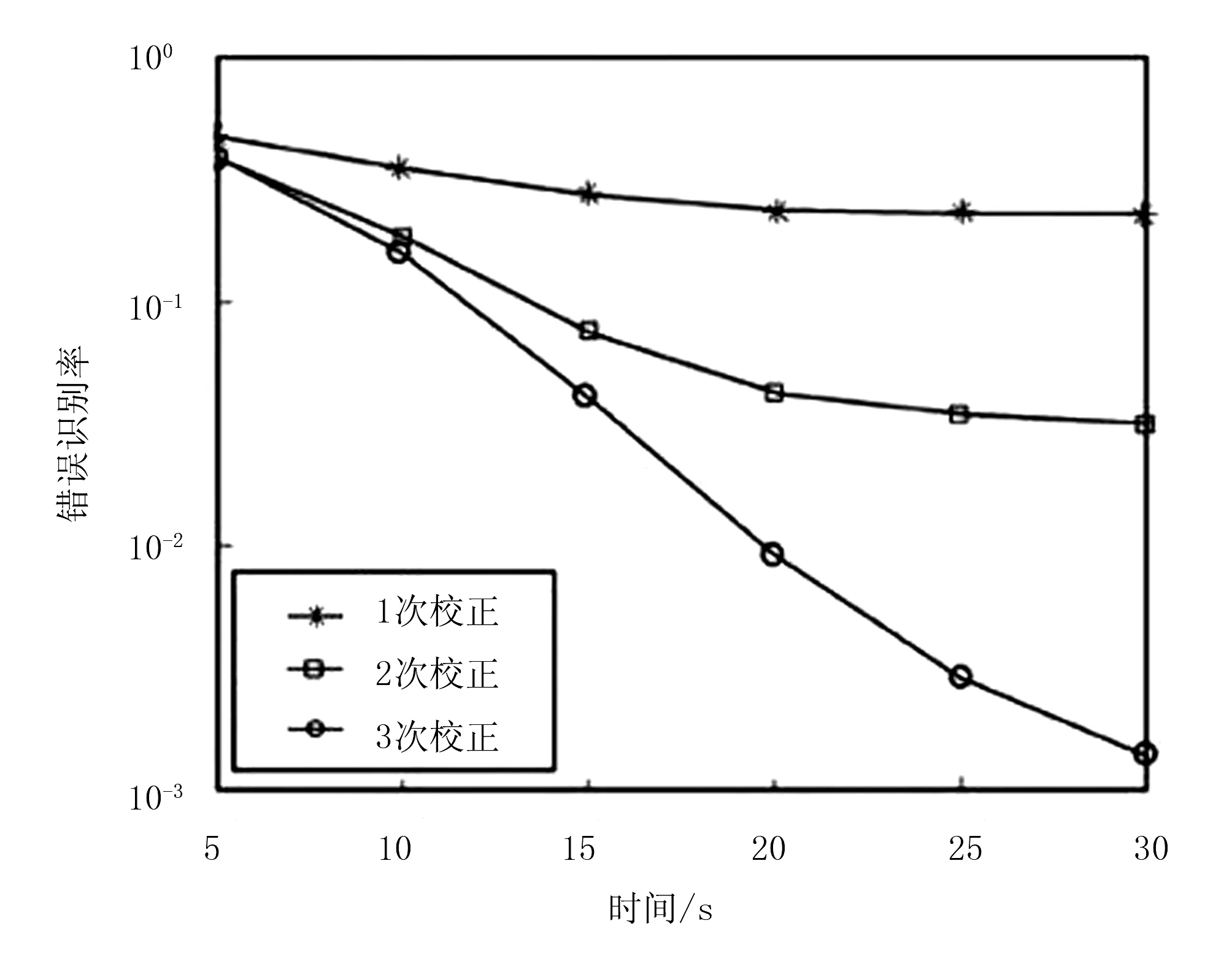
图7 多次校正果树错误识别率测试
表1表示利用采摘机器人对不同距离的果树进行定位后,得到的定位精度和错误识别率的结果。由表1可以看出:随着定位距离的增加,定位精度和错误识别率都没有产生较大的波动,定位精度达到了98.5%以上,而错误识别率也在0.32%以下,作业精度较高,满足果实采摘夜间作业的需求。

表1 不同距离定位精度和错误识别率测试
4 结论
1)利用RSSI信号强度定位原理,结合泰勒级数展开方法,提出了一种采摘机器人夜间定位的方案,并通过信道多次扫描的方式,实现了机器人的实时定位,从而大幅度地提高了采摘机器人的作业精度和作业效率。
2)对采摘机器人的夜间作业效果进行了测试,通过测试发现:随着定位距离的增加,定位精度和错误识别率都没有产生较大的波动;并且通过自身多次校正,可以有效的提高定位的精度,最终在24m以内的测试定位精度达到了98.5%以上,错误识别率也在0.32%以下,满足了夜间采摘作业的设计需求。
[1] 任维政,徐连明.基于RSSI的测距差分修正定位算法[J].传感器技术学报,2008,21(7):1247-1250.
[2] 王永才,赵千川,郑大钟.传感器网络自身定位方法的设计与实现[J].计算机工程与应用,2005,41(13):4-6.
[3] 李娟,王珂,李莉.基于锚圆交点加权质心的无线传感器网络定位算法[J].吉林大学学报:工业版,2009,39 (6):1649-1653.
[4] 杨凤,史浩山,朱灵波,等.一种基于测距的无线传感器网络智能定位算法[J].传感器技术学报,2008, 27(1):135-140.
[5] 刘艳文,王福豹,段渭军,等.基于DV-Hop定位算法和RSSI测距技术的定位系统[J].计算机应用,2007, 27(3):516-527.
[6] 孙佩刚,赵海,罗玎玎.智能空间中RSSI定位问题研究[J].电子学报.2007,7(35):1240-1245.
[7] 江冰,吴元忠,谢冬梅.无线传感器网络节点自身定位算法的研究[J].传感技术学报,2007(6):1381-1385.
[8] 李连,朱爱红.无线传感器网络中的定位技术研究[J].微计算机信息:测控自动化,2005,21(9):133-135.
[9] 李建中,高宏.无线传感器网络的研究进展[J].计算机研究与发展,2008,45(1):63-72.
[10] 张楠,董晓晶,张健.WGS-84坐标系与BJ-54坐标系的转换方法及精度探讨[J].制造业自动化,2009, 31(12):162-164.
[11] 朱向庆,陈志雄.采用GPS和GPRS的移动目标监控导航系统设计[J].计算机测量与控制,2011,19(5): 1133-1136.
[12] 王俭,陈卫东,赵鹤鸣.移动机器人全覆盖路径规划优化方法[J].计算机工程,2005,31(22):162-163.
[13] 吴修文,冯晓霞,孙康岭,等.农用机器人导航电子地图的研究[J].农业装备与车辆工程,2010(3): 40-42.
[14] 朱向庆,陈志雄.采用GPS和GPRS的移动目标监控导航系统设计[J].计算机测量与控制,2011,19(5): 1133-1136.
[15] 李界家,陈浩,李颖.神经网络迭代算法解耦控制在中央空调系统中的应用[J].沈阳建筑大学学报, 2012,28(1):182-186.
[16] 徐文兵,高飞.天宝TrimbleAgGPS332单点定位在林业测量中的应用探析[J].浙江林学院学报,2010, 27(2):310-315.
[17] 丁吉昌,崔现成.一副叠加有噪声图像的边缘分割的讨论[J].医疗设备信息,2001,12:12-13.
[18] 纪淑娟,李东华,柏兰,等.扫描方式对南果梨近红外光谱无损检测模型建立的影响研究[J].食品科学, 2008,29(6):383-386.
[19] 周莹,傅霞萍,应义斌.湿度对近红外光谱检测的影响[J].光谱学与光谱分析,2007,27(11):2197-2199.
[20] 周俊,程嘉煜.基于机器视觉的农业机器人运动障碍目标检测[J].农业机械学报,2011,42(8):154-158.
[21] 朱安民,明仲.基于神经动力学的目标跟踪算法[J].深圳大学学报:理工版,2009,3(26):83-88.
[22] 朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.
[23] 朱庆保.动态复杂环境下的机器人路径规划蚂蚁预测算法[J].计算机学报,2005,28(11):1898-1906.
[24] 樊景超,周国民.苹果近红外光谱采集影响因素研究[J].安徽农业科学,2011,39(1):464-467.
[25] 吴迪,陈孝敬,何勇.基于离散余弦变换和支持向量机的多光谱纹理图像的茶叶分类研究[J].光谱学与光谱分析,2009,29(5):1382-1385.
[26] 史敏.基于红外光谱技术的猕猴桃品质检测研究[D].杨凌:西北农林科技大学,2008:1-9.
[27] 曹志勇,邱靖,曹志娟,等.基于改进型神经网络的植物病虫害预警模型的构建[J].安徽农业科学,2010, 38(1):538-540.
Design of Night Picking Robot Based on RSSI Signal Intensity Location Method
Ma Yongbing
(Nanjing College of Information Technology, Nanjing 210023, China)
In order to improve the working efficiency of the fruit picking robot in the night, a method for locating the fruit of the fruit picking robot is proposed, and the RSSI signal intensity is introduced. Based on this, a high precision positioning method for the Taylor series expansion is proposed. At night, the RSSI signal intensity is used to locate the fruit trees. In order to meet the real-time positioning of the robot moving, the real-time performance of the robot is improved by using multiple channels. In order to verify the effectiveness and reliability of the robot, the robot's performance is tested by the test. The test shows that the accuracy of the robot is relatively high, and the accuracy can be improved.
RSSI signal intensity; fruit picking; taylor series; positioning accuracy; real time
2015-11-27
湖北省自然科学基金项目(2014CFB322)
马永兵(1976-),男,江苏海安人,副教授,(E-mail)ybma76@qq.com。
S225.93;TP242
A
1003-188X(2017)01-0212-05
