玉米收获机械四驱传动参数分析实验
2017-12-15周德义刘林鹤吕新磊王子佳
施 新,周德义,刘林鹤,吕新磊,王子佳
(1.吉林大学 生物与农业工程学院,长春 130022; 2.长春格瑞特农业装备科技有限公司,长春 130507)
玉米收获机械四驱传动参数分析实验
施 新1,周德义1,刘林鹤1,吕新磊1,王子佳2
(1.吉林大学 生物与农业工程学院,长春 130022; 2.长春格瑞特农业装备科技有限公司,长春 130507)
农业机械工作环境恶劣,其适应性要求比路面机械高很多,尤其面对田间不良地况时,对农业机械的行驶性能要求更高。对于大型农业机械的田间作业,应用四轮驱动有利于提高机器与地面的附着力和行驶的稳定性,使得大型农业机械在田间作业时不至于因为对地面的附着力不足而轻易打滑。玉米收获机在我国东北地区的垄作田间地头需要掉头及丘陵地区斜坡工作时都需要提高稳定性和对地面的附着力,而四轮驱动是一种很好的解决方案。在某种程度上,采用四轮驱动,可能会因为前、后轮之间速度匹配不当而使得前后驱动桥之间产生干涉作用,加剧了机器磨损,缩短了机器的寿命;但从总体上看,适宜地采用四轮驱动在实际应用中还是更有优势。为此,采用理论分析、实际计算和样机试验的方式分析玉米收获机的前、后轮的速度匹配问题,讨论不同的超前率对机器驱动桥和轮胎磨损、寿命的影响。
超前率;驱动桥;玉米收获机;磨损;速度匹配
0 引言
随着农业全程机械化的推进,玉米收获环节的机械化程度越来越高,玉米联合收获机普及程度逐年提高。面对田间不良地况环境对收获机行驶性能的不利影响和用户对更高操作舒适性追求之间的矛盾,逐步推广四轮驱动玉米收获机是一个很明显的趋势。农业机械工作的环境恶劣,对机械的环境适应性要求比平常的路面机械高很多。在田间恶劣的行驶环境中,四轮驱动可以提高机械与地面的驱动附着力,提升驱动性能和行驶的稳定性。但是,不当的前、后轮速度匹配将会加剧机器的磨损,缩短机器的寿命。因此,在推广四轮驱动玉米收获机时,前、后轮速度匹配是一个不可忽视的问题,尽管四轮驱动比相应的两轮驱动成本要高,机器的价格相应的也要高,但是综合而言更受欢迎。在实际环境中,前后轮线速度差比在一定的范围内均可以使得四轮驱动提高收获机的行驶性能,提升其工作效率,克服不良环境对收获进度的阻碍。为此,本文主要通过理论分析、实际计算和田间试验的方式讨论适宜的超前率的范围[1-3]。
1 四轮驱动的分类和优缺点
四轮驱动按不同的分类方法可以得到不同的结果;按照四轮驱动的驱动时间可以分为:全时驱动,适时驱动及手动分时四轮驱动;按照驱动结构可以分为:全机械式四驱传动、前机械后液压四驱传动及前后均为液压的四驱传动。本文讨论的内容就是按照第2种分类方法得出的几种四轮驱动方式。下面介绍现阶段玉米收获机上应用的四驱传动的方式及优缺点。
1)全机械式四驱传动:近年来,国家对农业机械补贴力度加大,促使许多其他产业的资本进入农业装备行业,尤其是玉米收获机械;但是,我国在玉米收获机的技术水平方面与美国等发达国家仍然有很大的差距。在国家的大力补贴下形成了如下局面:小作坊式的玉米收获机厂家数量大幅增加;但没有技术积累,导致整体装备技术水平不高,故障率居高不下。在机器的结构应用方面,主要使用的还是机械式和液压式,电气化水平不高;在驱动结构上主要使用的是全机械式驱动桥。在四驱玉米收获机上使用的多是机械式结构,通过将前驱动桥的动力通过万向节传递到后桥上以实现四轮驱动。而前后轮的速度匹配则受前后轮胎的直径大小和前后桥内各级齿轮的传动比大小的影响。该方式的四驱传动具有技术水平要求低、生产制造成本低及容易实现等优点,但在性能上却有所不足。万向节的使用使得玉米收获机上的还田机必须后置,造成两轮驱动和四轮驱动机器在结构上差异加大,零件通用性降低,成本会相应上升。在某些使用场合会由于扒皮机上的落叶造成玉米外皮缠绕中间传动轴的现象,为了防止中间万向节传动距离过长,不少厂家会选择在中间部位加上中间支撑,造成了万向节传动时角度过大,功率损耗加大。另一方面,该种传动方式,在前后驱动桥中间的连接上一般会出现一对弧形锥齿轮,在正向前进时能够提高传动接触的平稳性,减少传动过程中的冲击载荷的作用;但是,在四轮驱动倒挡行驶时弧形齿轮反向传动容易出现打齿的现象,而该对弧形齿轮的维修需要拆开驱动桥大部分结构,十分不方便。
2)前驱动桥机械式、后驱动桥液压式:后驱动桥液压的动力来源可以分为两种:一种是后驱动桥的液压动力直接从发动机上的液压泵上获得,速度由传感器检测前轮转速而匹配控制;另一种是后驱动桥的动力从安装在前驱动桥上的泵上获得,前后轮的速度直接由部件内部的结构匹配控制。液压传动虽有其优点,但由于其对密封性的严格要求,致使很多小企业不具备这样的生产条件。目前,我国一些大中型的玉米收获机厂家正在进行该类型四轮驱动玉米收获机的生产和使用的推广。
3)前驱动桥和后驱动桥均为液压式的驱动桥:其速度匹配直接由传感器控制,通过改变发动机带动的液压泵输出到前驱动桥和后驱动桥上的液压马达内的流量来改变前、后轮速度,以实现合理的速度匹配。由于该方法需要一定的技术积累和研发水平,所以目前我国国内只有大型玉米收获机厂家正在完善、生产和推广。
4 )目前,国外发达国家相关的液压传动技术发展领先于我国,相关的精密零部件生产水平能够支撑全液压传动的应用,故国外的大型玉米收获机上安装的多是全液压驱动桥和转向桥。该种配置方式可以很容易地实现无级变速功能,机器整体布置结构也相对简单,容易在机器结构不变时实现动力传递路线的变更。目前,国内尚且没有厂家能够在低成本的条件下生产液压传动和控制的核心零部件,导致整套液压传动和驱动系统的成本很高,生产出的大型玉米收获机竞争力很不足[4-6]。
2 拖拉机四轮驱动技术现状
四轮驱动拖拉机与目前尚在使用中的两轮驱动拖拉机相比,优点有很多,主要是其良好的对地附着性能和不良路况的通过性能。目前,四轮驱动拖拉机主要应用在耕整地等载荷较大、工作环境比较恶劣及速度较低时,而在运输等高速状态下是不能使用四轮驱动的,以防止对机器本身造成快速的磨损和破坏。因此,多数四轮驱动拖拉机在使用说明上明确的标注出,禁止高速四轮驱动。下面具体分析四轮驱动拖拉机前后轮的速度匹配问题。
四轮驱动拖拉机在实际行驶的过程中,前轮与后轮的线速度是一致的,分别记为VF和VR,记拖拉机前进速度为V,则
VF=VR=V
(1)
引入滑转率,实际速度与理论速度的关系为
(2)
(3)
式中 VLF—前驱动轮的理论速度;
VLR—后驱动轮的理论速度;
δF—前驱动轮的滑转率;
δR—后驱动轮的滑转率。
将式(2)、式(3)代入式(1)中得
整理上式可得
(4)
式(4)中△V=VLR-VLF为后驱动轮和前驱动轮理论速度之差。
(5)
相关文献记载,对于前驱动轮理论速度VLF、后驱动轮理论速度VLR及拖拉机实际前进速度V产生功率循环的临界条件为: VLR>VLF=V;故一般四轮驱动拖拉机为了防止产生功率循环,在设计时一般是前轮理论速度VLF稍快于后轮的理论速度VLR,即超前率为负值。
关于拖拉机的超前率的取值范围,各个国家的规定不尽相同。从实际应用角度看,我国早期引进过的是意大利Fiat公司生产的变型四轮驱动拖拉,该公司的变型四轮驱动拖拉机性能良好。几个国家拖拉机超前率的选取范围如表1所示。
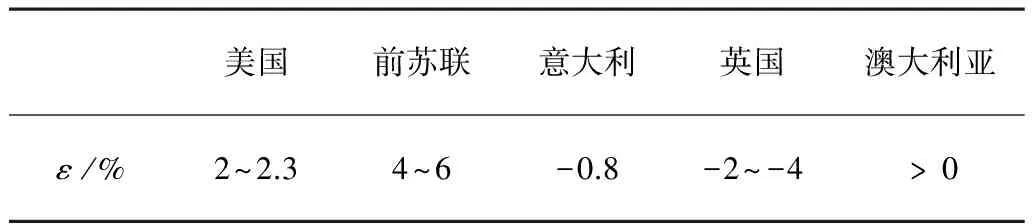
表1 几个国家拖拉机超前率的选取范围
从另一个方面考虑,在不同的地面条件下,超前率的范围也是不同的,尤其各自的合理的超前率范围。表2即为相关典型地面条件下的合理超前率范围。
目前,我国的主要拖拉机生产厂家在设计拖拉机时,超前率一般取值为-3%左右[7-8]。
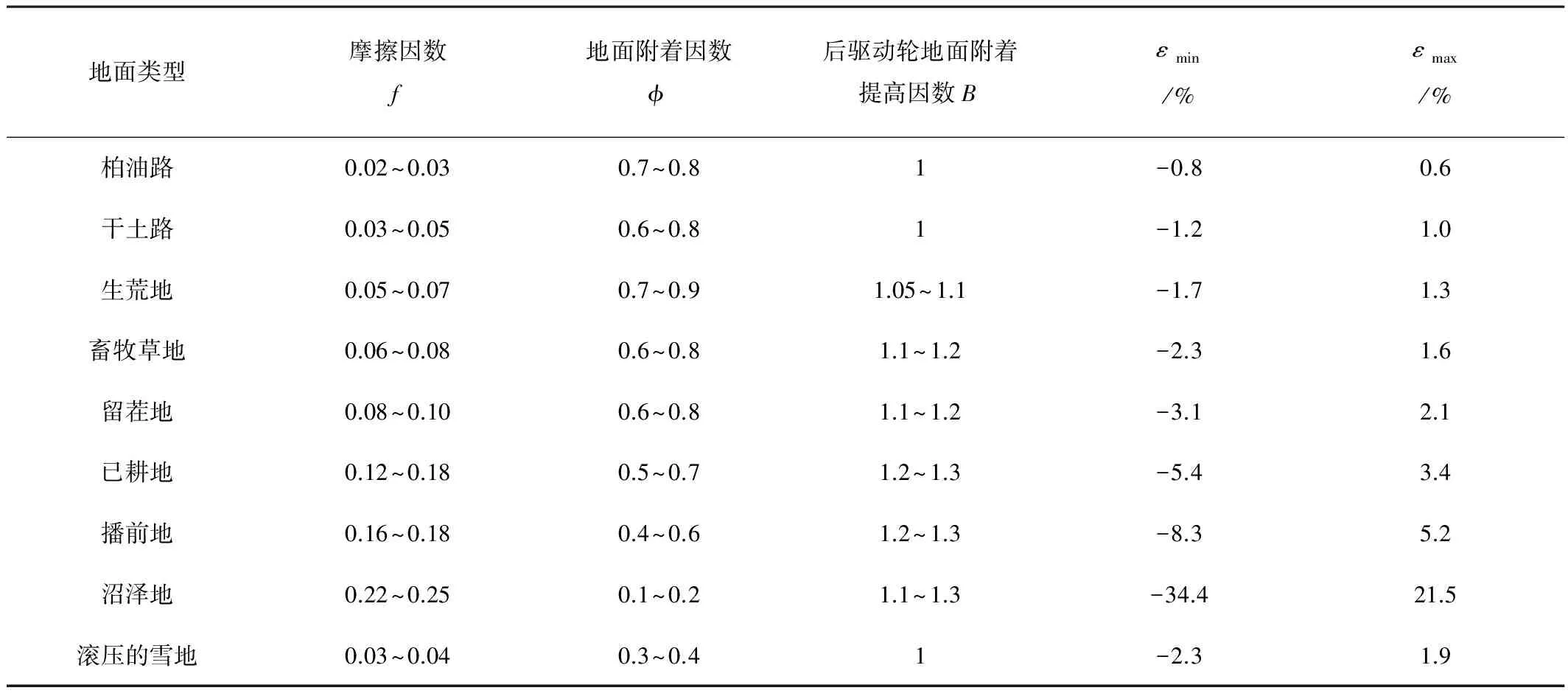
表2 典型地面条件下的合理超前率范围
3 某款玉米收获机超前率的实际计算
以长春格瑞特农业装备科技有限公司的某一款速度匹配并不成功的四驱玉米收获机上应用的前后驱动桥为例,计算四驱玉米收获机上的超前率问题。该款玉米收获机上前驱动桥应用的是兖州市丰业机械有限公司生产的四轮驱动的前驱动桥,型号为Y550;后驱动桥为潍坊谷合传动技术有限公司的四轮驱动的后驱动转向桥型号为554。对于前驱动桥,该型号(Y550)的丰业驱动桥主要应用于2行与3行玉米收获机,有四轮驱动和两轮驱动的两种类型。四轮驱动桥比两轮驱动桥多了一套动力分配机构,两轮驱动桥和四轮驱动桥的内部结构如图1和图2所示。
图3显示的是动力传递路线,发动机上的动力传递到皮带轮后,带动第1轴,继续通过齿轮啮合传递动力到达图3中所指示的第4轴上,动力在第4轴上分别通过13齿齿轮和30齿齿轮向后传递,即将一分为二的动力分别传递到前轮轮毂和后驱动桥,以达到四轮驱动的目的。其中,拉臂为后轮动力结合和切断的操作机构,通过该拉臂上下摆动可以达到左右移动啮合套的目的,以实现后驱动动力的结合与切断。图4为四轮驱动的后驱动桥[9]。
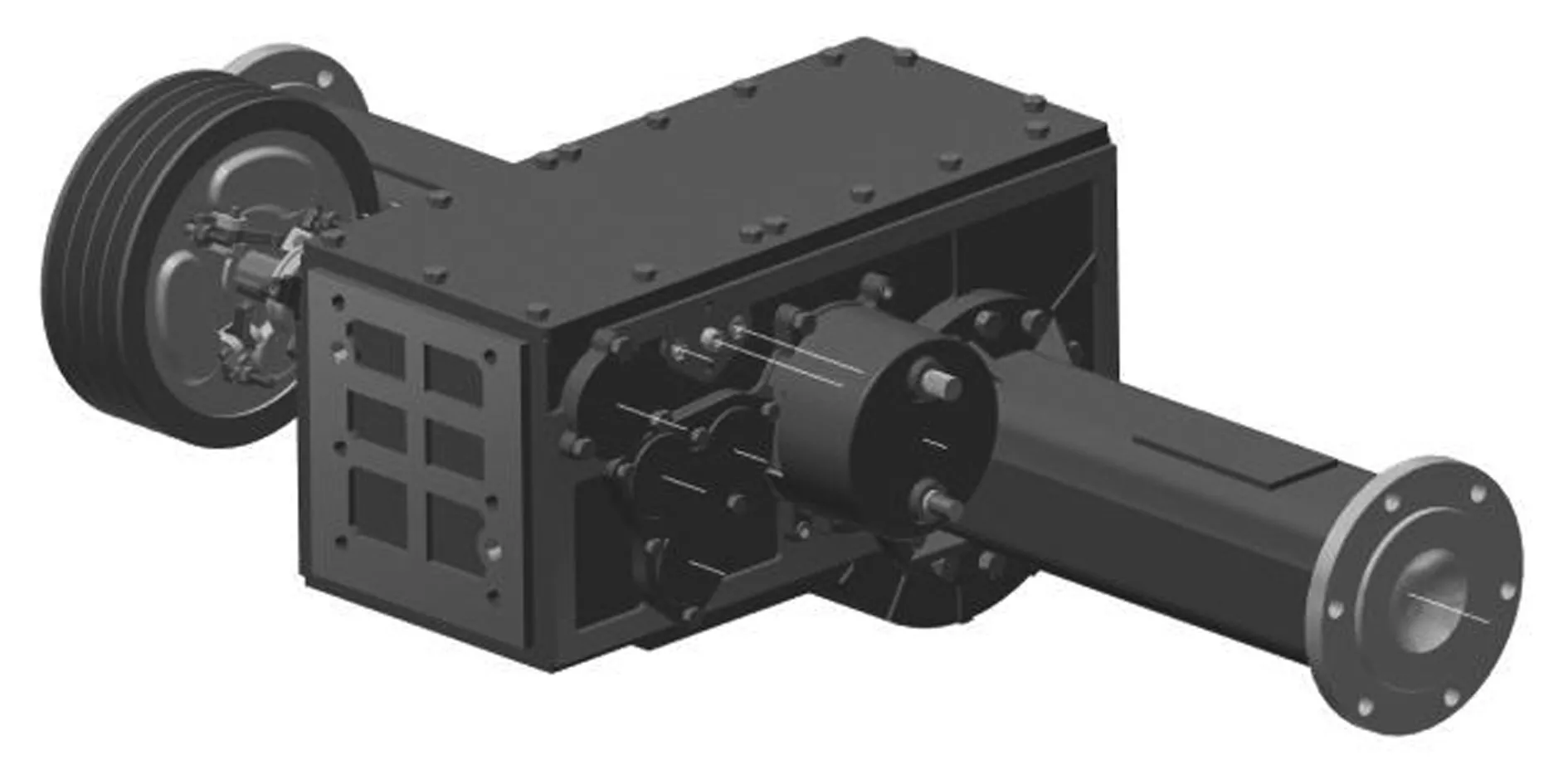
图1 两轮驱动前驱动桥图
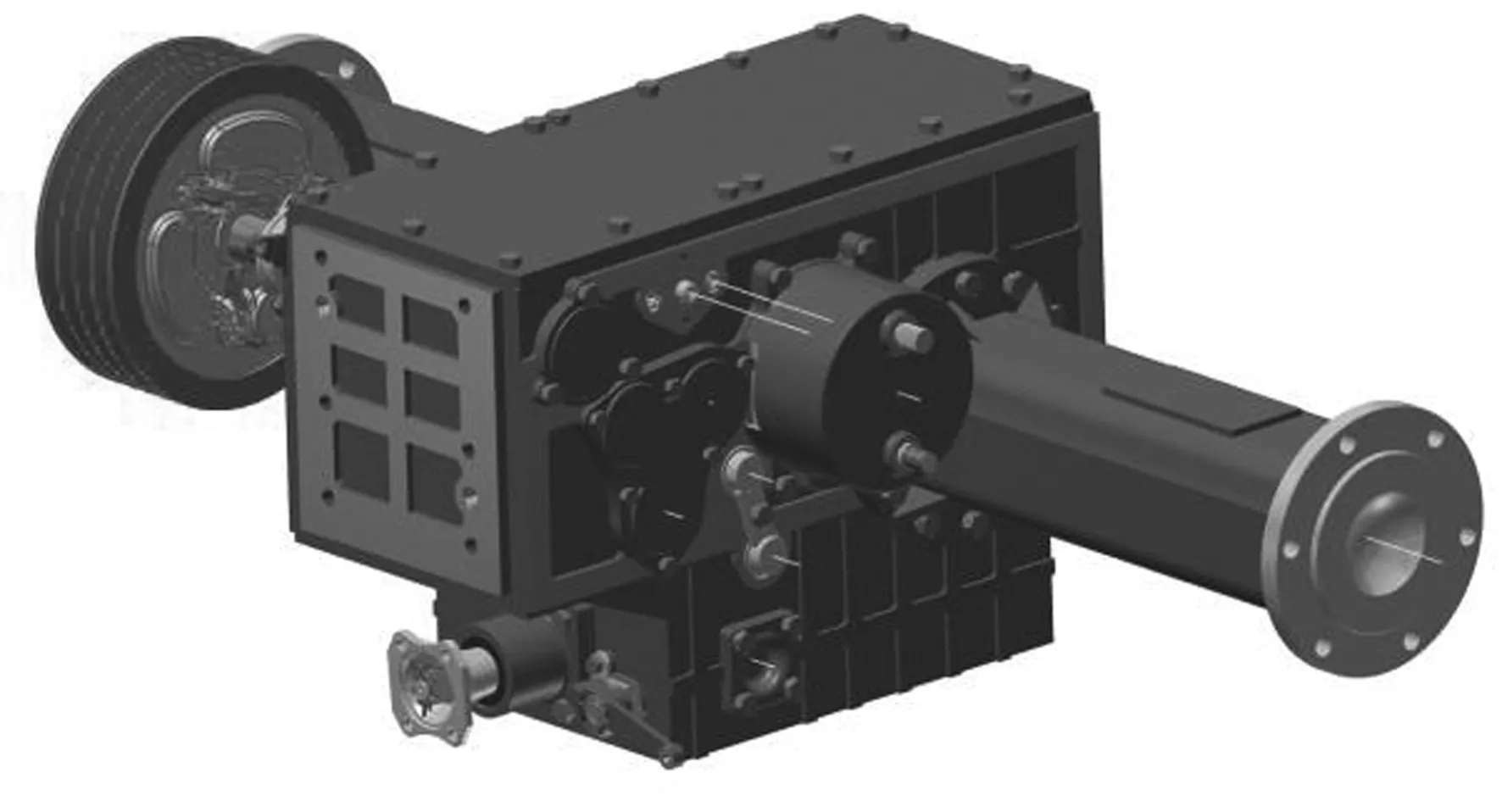
图2 四轮驱动前驱动桥图
本文主要分析四轮驱动的驱动桥前桥部分,如图5所示。其中,第1轴上的齿轮齿数为20齿;第2轴上的齿轮齿数依次为19、19、35齿;第3轴上的齿轮齿数依次为22、33、29、34、17齿;第4轴上的齿轮齿数为36、 25、 30、 29、 13、 30齿;第5轴上的齿轮齿数为19齿;第6轴上的齿轮齿数依次为26、29齿;第7轴上的齿轮齿数依次为20弧齿及30齿平齿。
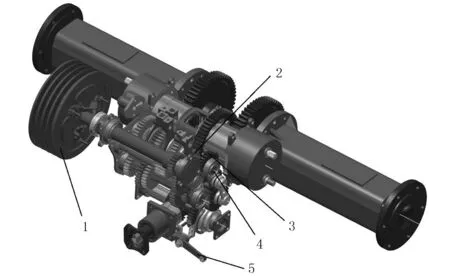
1.皮带轮 2.13齿轮轴 3.30齿轮 4.第4轴 5.拉臂

图4 四轮驱动后驱动桥动力传递路线图
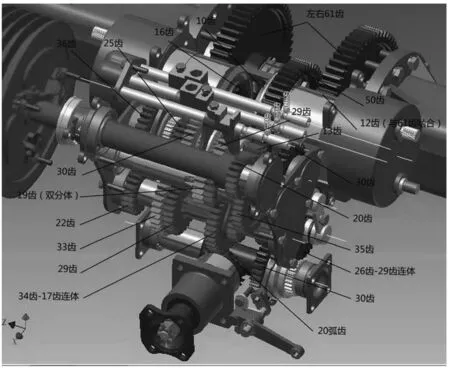
图5 四轮驱动前驱动桥内部齿轮图
在此,通过工作时的发动机的额定转速进行推导,设定输入前驱动桥的皮带轮转度为ω=1 600r/min,分析前、后驱动桥的结构,计算四轮驱动桥的传动比;以Ⅰ挡为例,计算第1轴到前、后轮的传动比以及前、后轮线速度。
第1轴和前轮之间的传动比为
后驱动转向桥内部的传动比为
第1轴和后轮之间的传动比为
前轮线速度为
后轮线速度为
前、后轮的规格为:d=740mm、D=940mm。
线速度差为
△V=VLR-VLF=0.0672m/s
前后轮速差比(超前率)为
其他挡位的传动比、线速度计算数值、线速度差值及线速度差比数值计算如下表3所示。
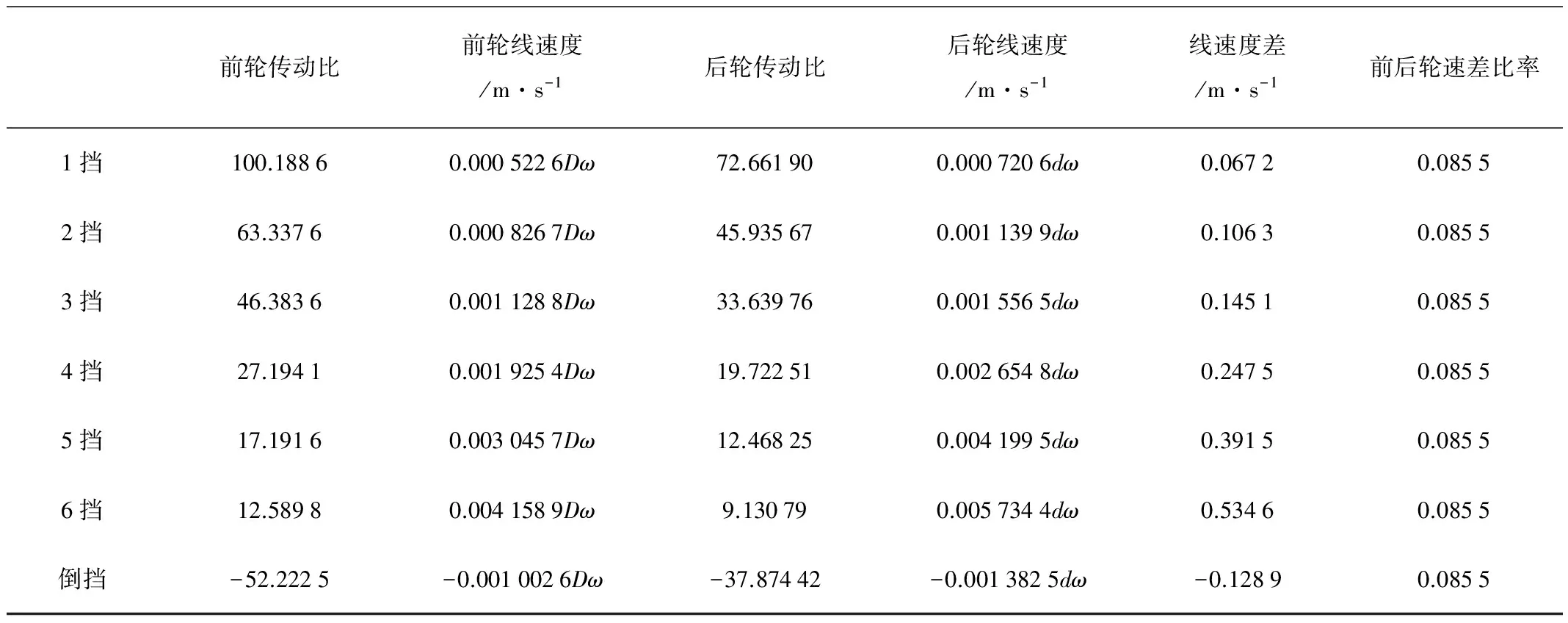
表3 数据记录表
从上述计算可知:在其他因素相同时(如前轮直径D和后轮直径d的取值),对于前、后轮的线速度差会因为挡位不同而变化:挡位升高,线速度差增大,但其相应的速度差比值不受档位不同的影响,为一个定值0.085 5。当然,如果选择在同一挡位,而修改前、后轮的直径可以计算如下:假设修改后的前后轮直径分别为:D=1 000mm、d=760mm,则前后轮速度差比值为0.047 9。由上述计算可知,可以通过修改轮胎规格的方法改变前、后轮速度差比,即改变超前率。
上述计算的是长春格瑞特农业装备科技有限公司的尚在研制中的玉米收获机样机,所用的样机实验表明,选择上述规格的轮胎与上述的前、后驱动桥匹配时,工作效果很差,多数在很短的工作时间内机器的行走系统就出现了问题。经过检查,原因为前、后驱动桥内齿轮出现打齿现象和重度磨损现象,轮胎磨损明显;且在使用四轮驱动行驶时,动力性能发挥的不明显,机器在挂上四轮驱动前进时稳定性变差。
4 实验设计及数据分析
为了解决上述速度匹配不当的问题,在不改变前、后轮胎规格的前提下,通过调整驱动桥内的部分齿轮齿数的方式来改变前后轮的速度匹配, 获得不同的超前率的值。改变前驱动桥内的4个齿轮的齿数如表4所示。
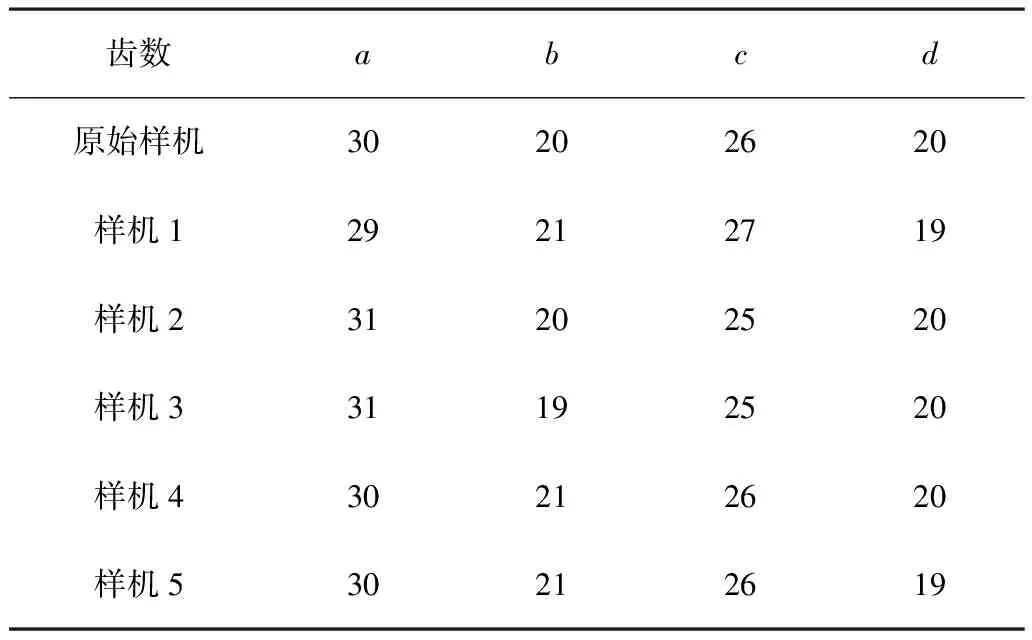
表4 齿数变换表
a代表第7轴上平齿轮齿数;b代表输出接盘轴上的弧锥齿轮齿数;c代表第6轴上平齿轮齿数;d第7轴上弧锥齿轮齿数。
在改变上述前驱动桥内齿轮的前提下进行实地收获玉米的试验。在德惠市岔路口镇试验田、永吉县岔路河镇试验田、农安县烧锅镇试验田和九台市兴隆镇试验田内进行,试验时间设计为15天共120h,在相同地形的玉米的地里进行正常的作业,在不同超前率的数种情况下驱动桥内齿轮磨损程度(主要考察非替换齿轮)及前、后轮胎磨损程度记录如表5所示。
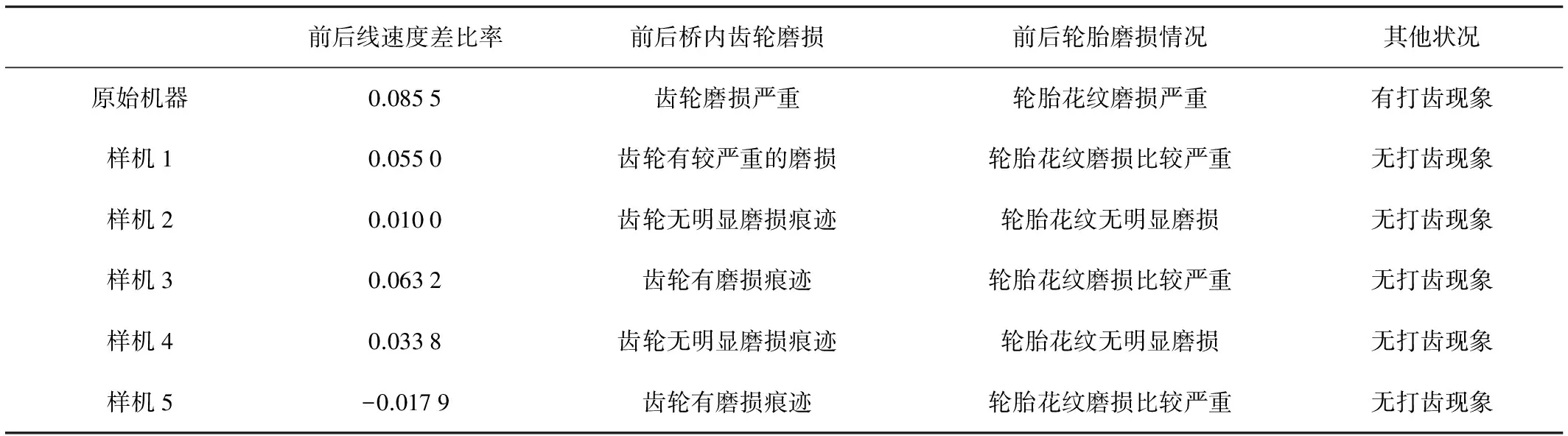
表5 实验现象记录表
5 结论
玉米收获机在作业时自身的质量会随着收获作物的增多而增加,以至于轮胎变形,使得轮胎实际的工作半径变小;而后轮尺寸较小,且增加的收获的作物质量大多作用在后轮上,致使后轮变形比前轮更加严重。从实际应用的角度看,一般也是在载荷较大、前进动力不足时使用四轮驱动,故前后轮的线速度不应该完全相等,而应该保持其线速度差比值在一个合理的范围内。由本试验的数据分析结合拖拉机相关数据可知,将线速度差的比值保持在-4%~-2%之间能够使得玉米收获机工作良好。
[1] 郭治鹏.玉米收获机械推广现状及前景研究[D].郑州:河南农业大学,2012.
[2] 陈志,郝付平,王锋德,等.中国玉米收获技术与装备发展研究[J].农业机械学报,2012,43(12):44-50.
[3] 刘声春,张道林,张继磊,等.我国玉米收获机研制现状及发展展望[J].农机化研究,2009,31(11):241-246.
[4] 何平.四驱的分类[J].交通世界,1997(11):16.
[5] 刘清波.智能四驱与其它四驱系统的仿真比较[J].科技市场经济,2006(5):16.
[6] 刘俊瑞.四轮驱动拖拉机的特点探讨[J].农业机械,2003(10):25.
[7] 黄兴华.变型四轮拖拉机转向过程中功率循环的理论分析[J].农机化研究,1988(2):28-33.
[8] 黄兴华.变型四轮驱动拖拉机合理超前率选择的理论分析[J].农机化研究,1993(1):13-18.
[9] 王子佳.4YZ-2自走式玉米联合收获机总体设计及关键部件的研究[D].长春:吉林大学,2013.
Analysis on Transmission Parameters of Four-wheel Drive Corn Harvester
Shi Xin1, Zhou Deyi1, Liu Linhe1, Lv Xinlei1, Wang Zijia2
(1.College of Biological and Agricultural Engineering, Jilin University, Changchun 130022, China; 2.Changchun Great Agricultural Equipment Technology Co., LTD,Changchun 130507,China)
Agricultural machinery always work at poor environment,which requires it should have more adaptability to harsh environment than road machinery, especially in the face of adverse ground conditions in the field,agricultural machinery requires more higher driving performance. For large agricultural machinery, four-wheel drive can improve grip to the ground and driving stability, which can avoid easy slipping during field work because of lack adhesion on the ground. Corn harvester, one of agricultural machinery, always work with heavy load in the field. Four-wheel drive is a good solution to improve stability and adhesion on the ground at poor field, especially when required turn round at the end of the field in the Northeast of China with ridges; when the harvester work at slope in hilly areas. To some extent, when use four-wheel drive with unsuitable speed match between the front wheels and rear wheels may create t interference effect between the front axle and rear axle, then it will increase wear and shorten the life of the machine. In general, the appropriate use of four-wheel drive in the practical application is still an advantage. In this paper, we will discuss the impact on the wear of entire machine and life of it under different advance rates conditions through actual calculation and experiments.
advance rates;drive axle;corn harvester;mechanical wear;speed matching
2015-11-30
农业科技成果转化资金项目(2013GB2B100122)
施 新(1991-),男,安徽滁州人,硕士研究生,(E-mail)935900490@qq.com。
周德义(1969-),男,长春人,副教授,硕士生导师,(E-mail)2297687739@qq.com。
S225.5+1
A
1003-188X(2017)01-0165-06
