夹指链式残膜回收装置仿形及收膜机构的改进设计与试验
2017-12-15王吉奎罗新豫牛海龙段文献布尔兰卡力木别克毕新胜
罗 威,王吉奎,2,罗新豫,牛海龙,段文献,李 阳,布尔兰·卡力木别克,毕新胜,2
夹指链式残膜回收装置仿形及收膜机构的改进设计与试验
罗 威1,王吉奎1,2※,罗新豫1,牛海龙1,段文献1,李 阳1,布尔兰·卡力木别克1,毕新胜1,2
(1. 石河子大学机械电气工程学院,石河子 832000;2. 农业部西北农业装备重点实验室,石河子 832000)
针对现有夹指链式残膜回收装置收膜作业地面仿形性差、作业性能不稳定的问题,设计了一种单铰接仿形及收膜机构,该机构主要由仿形机构和收膜机构两部分组成,整个收膜装置由多个单铰接仿形及收膜机构并排组成,每个单铰接仿形及收膜机构作业时可以单独仿形。仿形机构主要由仿形架、切膜圆盘、仿形轮、压紧机构和刮土板组成,切膜圆盘固连在仿形轮一侧,将地表残膜切成带状的同时对地表进行仿形,压紧弹簧产生的预压力使仿形机构始终紧贴地表仿形,通过对仿形机构的设计,确定了其结构尺寸参数,并对该装置的上仿形运动和下仿形运动进行了分析与讨论。田间试验表明,在机具作业5.5 km/h、切膜圆盘直径为280 mm、仿形轮直径为220 mm时,残膜回收率达93.1%,能够满足残膜回收技术要求,研究成果有利于解决残膜污染问题。
农业机械;设计;膜;残膜回收;单铰接;仿形
0 引 言
夹指链式残膜回收装置采用夹持原理回收残膜,收膜时残膜被夹在夹指和收膜链之间,残膜不易滑落,收膜可靠性高,可以收起目前广泛使用的超薄地膜[1-4]。当年使用后的残膜附在地表,夹指夹取残膜时夹指前端必须适当伸入土层。由于田间环境复杂,尤其在作物收获后,地表土壤坚实度大,且经一个作业季的耕作地面不平整,为保证夹指的入土深度,夹指夹取残膜时需对地面进行仿形[5-9]。但现有夹指链式残膜回收装置固联在机架上,夹指收膜仿形主要靠地轮仿形,夹指的入土深度有限,受机组作业颠颇和地面不平的影响,作业时夹指有可能不能入土,造成残膜漏收,致使收膜效果不稳定[10-15]。因此,需要在夹指链式残膜回收装置上设置仿形机构[16-18],确保夹指可靠入土,夹取残膜。
目前残膜回收装置的仿形普遍采用整体仿形,整体仿形是指收膜部件与机架刚性连接,整机依靠地轮随地表上下起伏实现收膜仿形。整体仿形结构比较简单,适用于一些收膜部件入土深度较大的机型[19-23]。夹指链式残膜回收装置由于其入土深度受到限制,不易采用整体仿形。
当前单铰接仿形机构广泛运用于播种机械的开沟器作业,而在残膜回收装置上应用较少[24-30]。本文结合夹指链式残膜回收装置的结构和工作特点,对现有仿形装置进行了改进,设计了一种单铰接仿形及收膜机构,改进的夹指链式残膜回收装置由多个单铰接仿形及收膜机构组成,每个单铰接仿形及收膜机构与机架独立铰接,工作中各个收膜机构根据地形起伏单独仿形,其仿形不受机组颠簸和其他收膜机构的影响。试验表明,单铰接仿形能使收膜机构紧贴地表,随地面高低浮动,确保夹指可靠入土,提高了夹指链式残膜回收装置的工作可靠性。研究成果对促进残膜污染治理具有重要意义。
1 整机结构与工作原理
1.1 整机结构
改进的夹指链式残膜回收装置由牵引装置、机架、地轮、残膜箱、单铰接仿形及收膜机构、脱膜装置、传动系统组成,单铰接仿形及收膜机构有多个,横向并列布置在机架上,其结构如图1所示。
每个单铰接仿形及收膜机构由仿形机构和收膜机构两部分组成,其中仿形机构由仿形架、切膜圆盘、仿形轮、压紧机构和刮土板组成,收膜机构由收膜架、上收膜链轮、下收膜链轮、收膜链、夹指、托轮和张紧机构组成,仿形架前端铰接在机架上,后端铰接在下收膜链轮轴上,仿形轮设在下收膜链轮轴端,切膜圆盘固连在仿形轮一侧,压紧机构上端设在机架上,下端铰接在仿形轮和下收膜链轮之间。
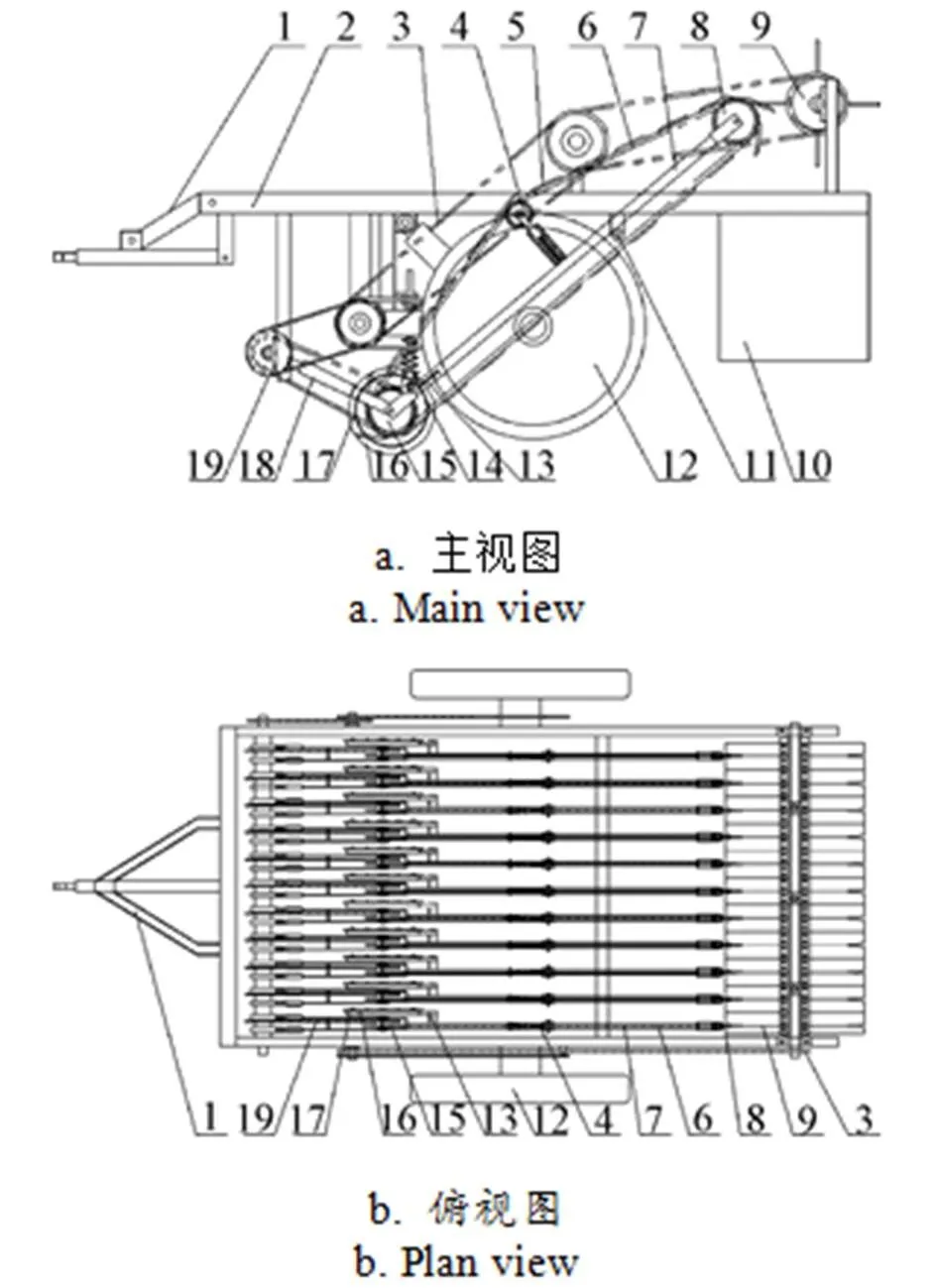
1.牵引装置 2.机架 3.脱膜传动系统 4.张紧机构 5.夹指 6.收膜链 7.收膜架 8.上收膜链轮 9.脱膜装置 10.残膜箱 11.托轮 12.地轮 13.刮土板 14.压紧机构 15.下收膜链轮 16.切膜圆盘 17.仿形轮 18.仿形架 19.收膜传动系统
1.2 工作原理
拖拉机通过牵引装置与机具相联组成作业机组,作业时机组顺着苗行前进,地轮通过传动系统带动单铰接仿形及收膜机构和脱膜装置工作。机具行进时,收膜机构通过仿形架被拖行在地表,切膜圆盘和仿形轮在压紧机构和重力作用下紧贴地面滚动,切膜圆盘将地表残膜切成带状,仿形轮随地面高低起伏,由于下收膜链轮与仿形轮同轴,下收膜链轮则随仿形轮一起起伏,同时收膜架可在托轮上上下移动,夹指随夹指链转过下收膜链轮时夹指与地面间距稳定,实现夹指夹持残膜时对地表实现仿形。夹指入土将带状残膜夹起,膜上土壤、秸秆和根茎等杂物会在残膜夹持上升的过程中从残膜两侧掉落于地表,残膜随着夹指链运动到上收膜链轮时夹指张开,残膜落入残膜箱,其收膜过程详见文献[1]。
1.3 主要技术指标
根据国家标准,结合新疆地区棉花种植模式,改进的夹指链式残膜回收装置主要技术指标如表1所示[1]。
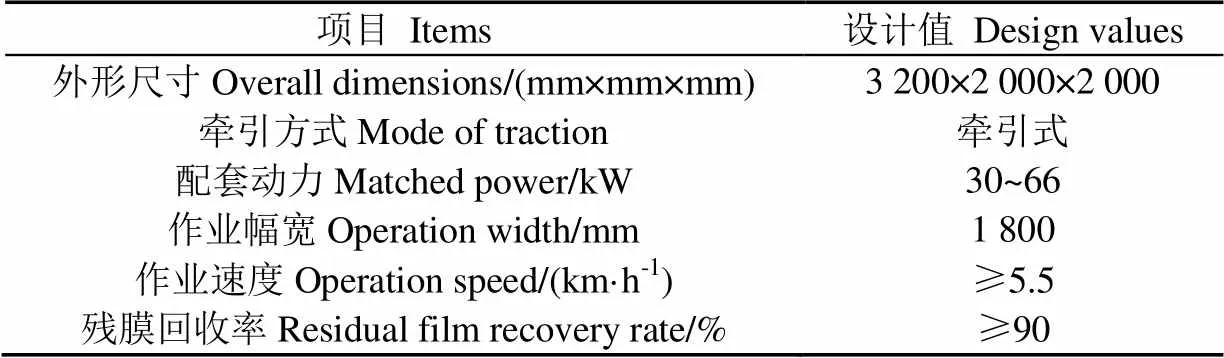
表1 主要技术指标
2 收膜部件改进设计
2.1 单铰接仿形及收膜机构
作物收获后残膜成片贴附在地表,夹指链式残膜回收装置收膜时夹指必须入土夹取残膜,试验证明仅就夹指而言夹指入土越深,则夹指入土后划过地面的距离越长,夹指夹取残膜的能力越强。但由于夹指工作长度有限,受夹指链式残膜回收装置结构限制,夹指入土深度不能太深,否则收膜链会入土将成片残膜划破,夹指设在收膜链外侧,夹指夹取残膜时正处于残膜划破部位,夹指有可能夹取不到残膜,故收膜作业时既要保证夹指入土深度而且收膜链不能过度刮破待收残膜。因此,收膜装置作业时必须对地面进行仿形,防止夹指入土深度过大或不足。
为提高仿形性能,将现有夹指链式残膜回收装置收膜机构各个夹指链分离,形成独立的收膜机构,且每个收膜机构可对地面进行独立仿形,独自回收残膜。单铰接仿形机构是一种简单仿形机构,该机构通过铰接方式与机架相联,在辅助部件的作用下可以使工作部件紧贴地面,比较适合残膜回收的仿形。基于此,现将单铰接仿形机构用于夹指链式残膜回收装置的仿形,与收膜机构一起组成单铰接仿形及收膜机构,其结构如图2所示。
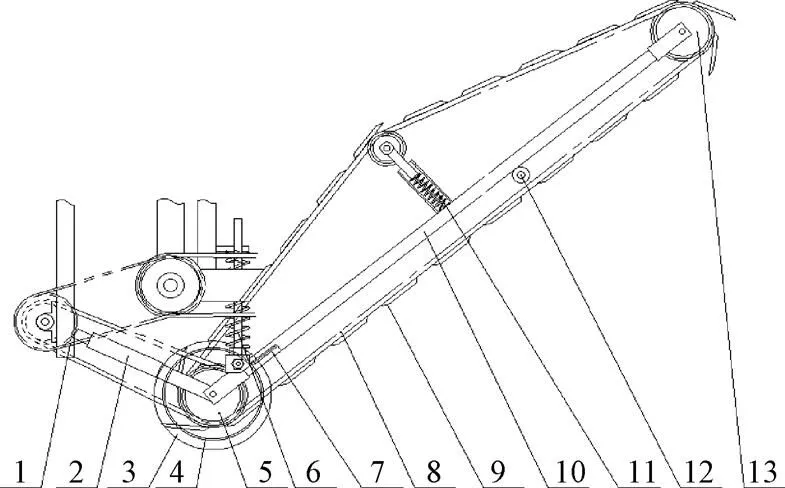
1.收膜传动系统 2.仿形架 3.切膜圆盘 4.仿形轮 5.下收膜链轮 6.压紧机构 7.刮土板 8.收膜链 9.夹指 10.收膜架 11.张紧机构 12.托轮 13.上收膜链轮
其中,托轮设在收膜架下侧,收膜架可在托轮上自由滑动。作业时在压紧机构和重力的作用下仿形轮紧贴地表滚动,因下收膜链轮与仿形轮同轴,所以下收膜链轮随仿形轮在地面高低起伏,确保夹指转过下收膜链轮时的入土深度。调整压紧弹簧的压力可以减少仿形过敏,且根据机构分析,这种仿形机构没有仿形滞后现象发生。刮土板的作用是刮去黏在仿形轮上的泥土,防止仿形轮黏土过多,尺寸增大,导致夹指入土深度不足。各收膜机构间有合适的预留空间,仿形轮和夹指链随机组滚动前进,地面秸秆和土块不会壅堵收膜机构。
2.1.1 仿形架
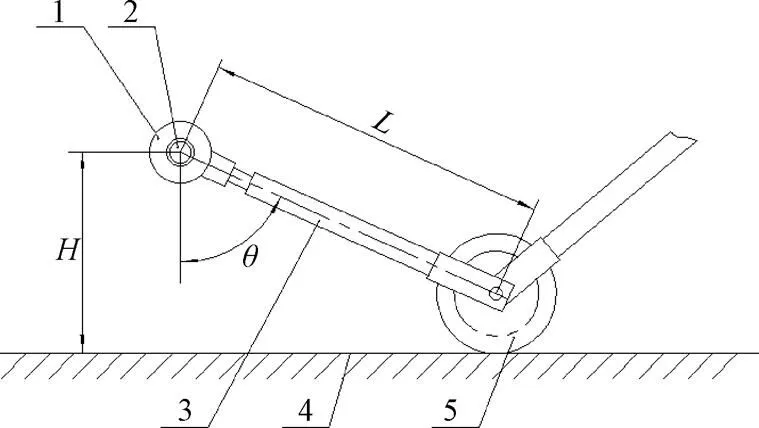
仿形架前端铰接在与机架相联的主传动轴上,后端与收膜架下端、切膜圆盘和仿形轮同轴联接,作业时,仿形轮在仿形架的拖曳下在地面自由滚动,实现对地表的仿形。仿形架的结构如图3所示。仿形架通过2个双球面轴承与主传动轴联接。
1.轴承 2.主传动轴 3.仿形架 4.地表 5.仿形轮
1.Bearing 2.Main driving shaft 3.Profiling frame 4.Land surface 5.Profiling wheel
注:为仿形架的长度,mm;为仿形架与竖直向下方向的夹角,(°);为铰接点到水平面的距离,mm。
Note:is length of profiling frame, mm;is the angle between profiling frame and the vertical downward direction, (°);is the distance from the hinge point to horizontal surface, mm.
图3 仿形架示意图
Fig.3 Schematic diagram of profiling frame
在主传动轴高度一定的情况下,影响仿形轮作业平稳性的主要因素主要是仿形架的长度,当仿形轮在平整地表运动时,仿形架与竖直方向上的夹角=arccos(-)/。为仿形轮的半径,mm。
由式(1)可知,Δ的变化率小于0在主传动轴和地表凸起高度一定的情况下,夹角的变化量随仿形架长度的增大而减小,即仿形架越长仿形轮在地面滚动越过凸起时摆动越小,整个收膜机构工作越平稳。考虑到机具的通过性和整机空间结构,主传动轴离地高度取值为300 mm,确定仿形架的长度=450mm。
2.1.2 仿形轮与切膜圆盘
作业时,仿形轮被压在地面滚动,其作用是保证同轴一侧的下收膜链轮经过不平整的地面时,下收膜链轮与地面保持在合理间距范围内,使夹指夹取残膜时能够入土。受机具空间限制,为简化结构,将切膜圆盘固联在仿形轮侧面,切膜圆盘内圈做仿形轮轮辐。这样以来切膜圆盘在切膜作业过程中也可实现地面仿形。另外,为疏松地表残膜,切膜圆盘侧面设有碎土齿。仿形轮与切膜圆盘的组合结构如图4所示。
仿形轮的直径大小决定下收膜链轮与地面的间距,在残膜不被划破的前提下,下收膜链轮与地面的间距越小,夹指的入土深度越大,夹指夹持残膜越可靠。残膜有一定的弹性和韧性,夹指链与地面刚接触的情况下对残膜损伤不大。因此,在不计夹指直径参数的条件下,仿形轮的直径可由夹指链转过下收膜链轮的最大回转直径确定,即仿形轮的直径1=220 mm。仿形轮的宽度影响仿形轮作业时在地面的压陷深度,压陷深度越大则对残膜回收来说仿形性越差。作物收获后田间地表土壤比较坚实,且单个夹指链残膜回收单元质量不大,仿形轮一侧固联切膜圆盘,切膜圆盘需要入土,调节压紧弹簧的压力可以调节仿形轮对地面的压力,以适应不同地面情况,因此仿形轮宽度不宜过大。另外,作物收获后,田间残膜有一定的强度和韧性,仿形轮在地表有一定的压痕深度,不影响残膜回收。田间试验仿形轮宽度=25 mm可以满足要求。
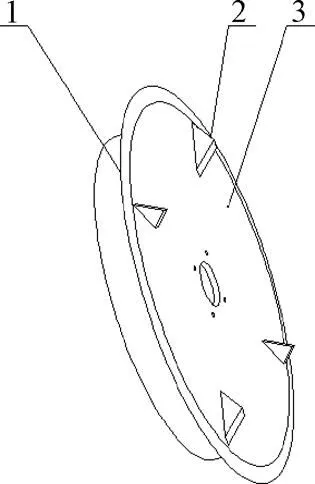
1.仿形轮 2.碎土齿 3.切膜圆盘
切膜圆盘直径2的大小对切膜效果有直接影响。当直径2过小时,由于残膜有一定韧性,且有地表不平整和地面秸秆的影响,则切膜圆盘与土壤的相互挤压力不足以将残膜彻底切开;当直径2过大时,若切膜圆盘遇到坚实的地面或秸秆会难以切入土层,使下收膜链轮离开地面,夹指不能充分入土,影响收膜。由于下收膜链轮直径加上夹指直径约为200 mm,在仿形轮限深作用下切膜圆盘直径2=280 mm既可以切开残膜,而且可以防止地面过硬或切到秸秆使切膜圆盘入土深度不足,仿形轮和夹指被支撑离开地面,造成残膜漏收。
铺在地表的残膜膜边压在土壤下,作物根部有密封膜孔的土壤,为防止铺好的地膜被风吹走,膜上有压膜土壤。经农作物一个生长季后,膜上的土壤已板结成块,并将残膜固定在地表,回收时残膜易被拉断,造成漏收。碎土齿的作用是将覆盖于残膜上的板结土壤挤碎,疏松土壤中的残膜,以减少膜上土壤对残膜在地面的固定作用,提高残膜回收率。碎土齿呈等腰直角三角形,底边固定于切膜圆盘外侧,两腰开有刃口,碎土齿与水平面间的夹角,对碎土效果有直接影响,结合田间试验,碎土齿与水平面的夹角=15°。
2.1.3 压紧机构
仿形轮和切膜圆盘合成一体,为保证收膜质量,作业时要确保切膜圆盘切入地表的同时仿形轮压在地面上滚动。由于田间地表情况比较复杂,若切膜圆盘入土深度不够,会造成仿形轮离开地面,导致夹指不能充分入土夹取残膜。压紧机构的作用是给仿形轮施加一向下的作用力,使仿形轮能可靠压紧在地面,其结构如图5所示,其中压紧弹簧套在导杆上,导杆上端设在机架上;调节张紧螺母可以调整压紧机构对仿形轮的压力。
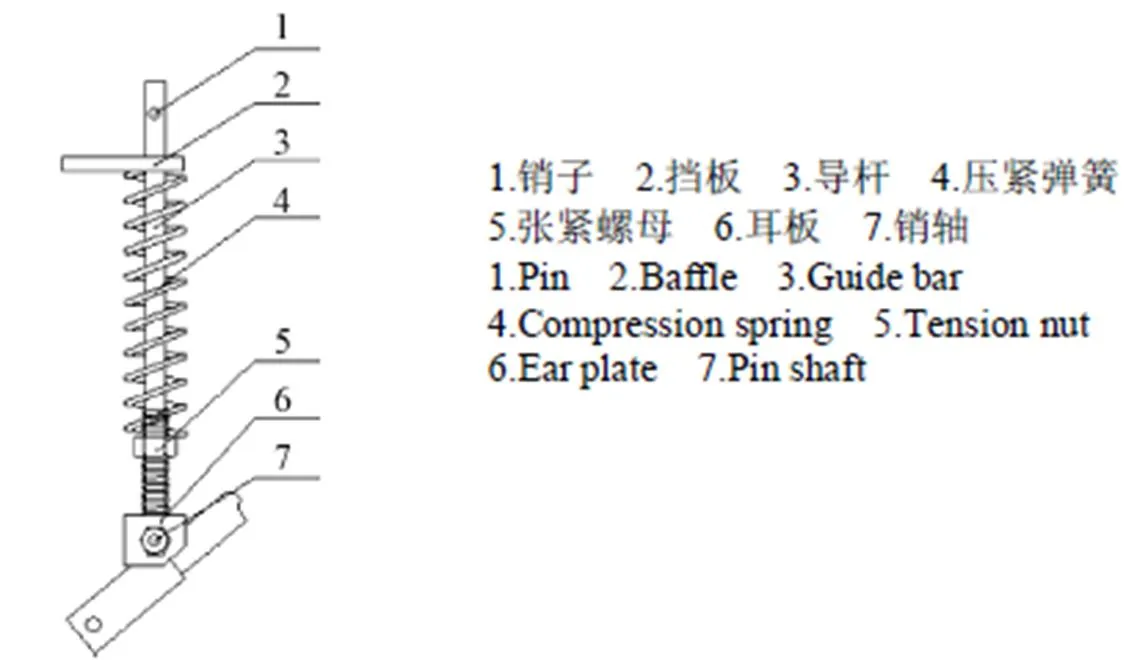
图5 压紧机构示意图
仿形轮随地面高低起伏,仿形轮相对机架上升时,压紧弹簧被压缩,仿形轮受压紧弹簧压力增大,此时应避免压紧弹簧变形,仿形轮下降时,压紧弹簧伸长,压紧弹簧压力变小,此时应防止切膜圆盘入土能力变弱而使仿形轮离开地面,因此,压紧弹簧的长度和劲度系数对仿形有直接影响。根据所受负载和田间试验,并结合弹簧设计手册[31],选用材料为碳素弹簧钢丝的I类C级弹簧,压紧弹簧直径为5 mm,中径为25 mm,总圈数32圈,有效圈数28圈,自由长度300 mm。
2.2 传动设计
夹指链收膜装置收膜作业时夹指链的线速度是作业机组前进速度的0.5倍[1],为保证这一传动比,夹指链收膜装置的传动由地轮带动。地轮通过地轮链轮将动力传递到主传动轴,主传动轴由3个固联在机架上的外球面轴承支撑,主传动轴刚度增大,仿形架通过两个铰接点连接在主传动轴上,仿形架横向摆动小,链传动转速低,可以保证运动传递的可靠性。改进的夹指链收膜装置各个收膜机构独自仿形,其传动亦需单独实施,传动系统如图6所示。
动力传递路线:机组前进时地轮在地面滚动,地轮链轮随地轮转动,地轮链轮将动力传递给中间链轮,中间链轮再将动力传递给主传动链轮,主传动链轮带动主传动轴转动,主传动轴上固联有多个分传动链轮,分传动链轮将动力传递给固联在下收膜链轮一侧的小链轮上。
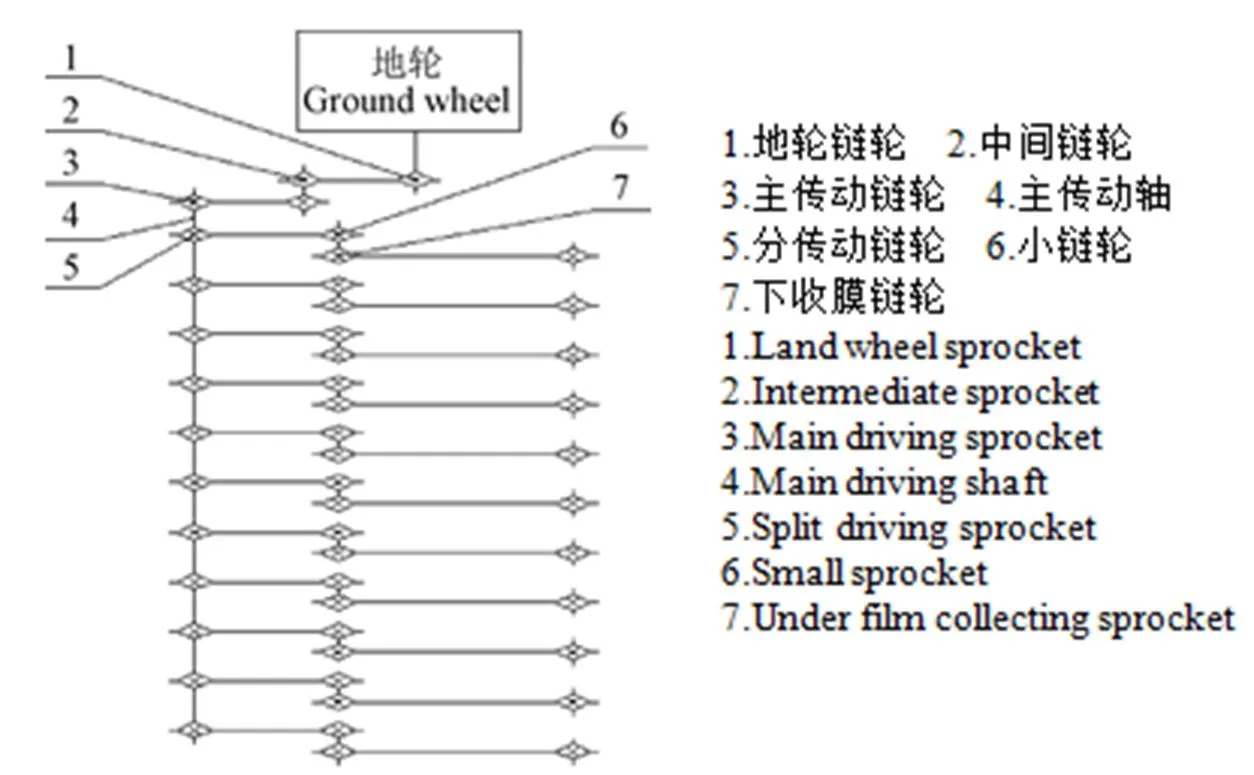
图6 传动系统结构示意图
3 仿形分析
作物收获后地面高低不平,待收残膜附在地表,回收残膜时要求仿形轮与地面紧贴,确保夹指能入土夹取残膜。当经过凸起地表时仿形轮相对地面向上运动,当经过低洼地面时仿形轮相对地面向下运动,在此过程中下收膜链轮伴随仿形轮同步运动,实现夹指夹取残膜的同时对地面仿形。因此,就本设计而言,分析仿形轮的地面仿形性能就相当于分析夹指夹取残膜时的地面仿形。
3.1 上仿形
为研究方便,设地面凸起断面为三角形,且凸起在仿形轮经过时不变形,地面凸起模型如图7所示。当仿形轮经过凸起时,在不计仿形轮与地面冲击的情况下,仿形轮由水平地面运动转为沿凸起的上坡面上升,压紧弹簧压缩,仿形轮受弹簧压力增大,仿形轮始终被压在坡面上;当仿形轮转过凸起顶部点时,在惯性的作用下,仿形轮做斜抛运动,离开地面,然后在重力和压紧弹簧力的作用下落到凸起另一侧下坡面点,最后仿形轮沿下坡面从凸起地面上下来。在仿形轮经过凸起地面过程中,只在经过凸起顶部后,仿形轮离开地面,没有对地面仿形。
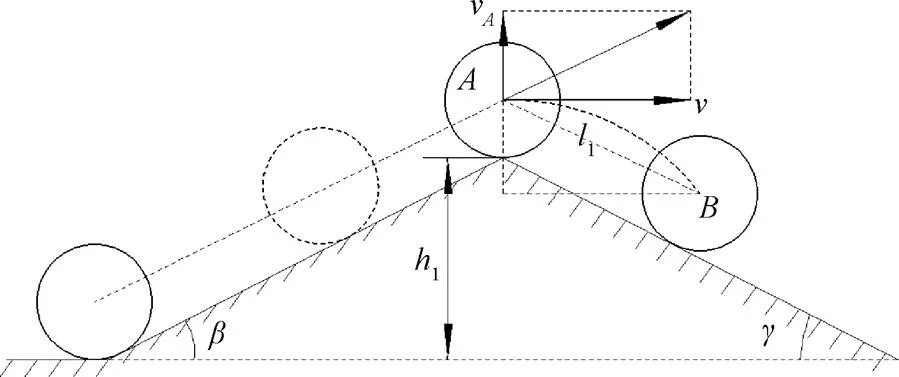
注:vA为仿形轮在垂直方向上的速度,m·s-1;v为机组前进速度,m·s-1;l1为仿形轮由A点跳落至B点之间的跳跃距离,mm;h1为地面凸起高度,mm;γ为凸起下坡面与水平面之间的夹角,(°);β为凸起上坡面与水平面之间的夹角,(°)。
设仿形轮由点跳落至点之间的跳跃距离为1,跳跃距离1的大小对夹指能否对该距离上的残膜进行有效的回收有重要影响。当距离1过大时,单个夹指回收残膜的地面面积增大,若地面残膜被土块等压住,残膜易被夹指拉断,造成漏收。因此,跳跃距离1要尽可能的小。
仿形架前端铰接在主传动轴上,仿形轮随地面高低起伏时,仿形轮绕主传动轴转动,因仿形架有一定的长度,仿形轮转动角度较小,这里假设仿形轮经过凸起时在垂直方向做直线运动。则仿形轮由凸起最高点跳落至点的过程中,在垂直地面方向上能量守恒,可以得到下式

式中为单个仿形收膜机构的质量,kg;为压紧弹簧的劲度系数,N/m;为仿形轮的重力加速度,=9.8 m/s2;v为仿形轮落到点时垂直方向的速度,m/s。
压紧弹簧的弹力作用于整个仿形收膜机构,但仿形收膜机构的仿形架前端铰接在主传动轴上,收膜架托在托轮上,可沿托轮滑动,为简化计算这里可设为单个仿形收膜机构的质量,kg。
根据图7,在凸起上坡面仿形轮垂直向上的速度由式(3)得出。
仿形轮由点运动到点所用的时间1为
在重力和弹簧压力作用下,仿形轮离开点和到达点时的加速度与分别为
式中0为仿形轮在水平运动时压紧弹簧的预压缩量,m。
仿形轮离开点后在竖直方向上做变加速运动,由积分法得仿形轮由点运动到点的加速度和垂直方向的速度表达式分别为
式中为仿形轮加速度的变化率,m/s3;1、2为常数。
将在点时设为初始条件,把式(3)和式(5)分别代入式(8)和式(7),可以得到1和2的值,将仿形轮在点的加速度式(6)、常数1和仿形轮由点运动到点所用的时间表达式(4)代入式(7),可以得到加速度变化率的值。
再将加速度变化率的值、式(4)、常数1和2的值代入式(8),可得仿形轮落在点时垂直方向的速度为

将式(3)、式(9)代入式(2)中,利用MatLab软件求解,得出仿形轮由点跳落至点之间的跳跃距离的表达式(1的表达式过于复杂,这里不列出)。
由1的表达式可知,在上仿形作业时,仿形轮由仿形轮由点跳落至点之间的跳跃距离1主要与机具作业速度、仿形轮在水平运动时压紧弹簧的初始形变量、仿形轮运动至凸起上坡面顶端时压紧弹簧的形变量、压紧弹簧的劲度系数、地面凸起断面参数有关。其中,跳跃距离1与压紧弹簧的劲度系数呈负相关,劲度系数和压紧弹簧的预压缩量越大,仿形轮跳跃距离1就越小;与机具作业速度正相关,作业速度越大仿形轮跳跃距离1越大。
3.2 下仿形
下仿形时仿形轮由水平运动转为下坡运动,仿形轮的运动模型如图8所示。仿形轮转过坡面顶端点时,在惯性的作用下仿形轮做平抛运动,离开地面,然后在重力和压紧弹簧力的作用下落到坡面点。
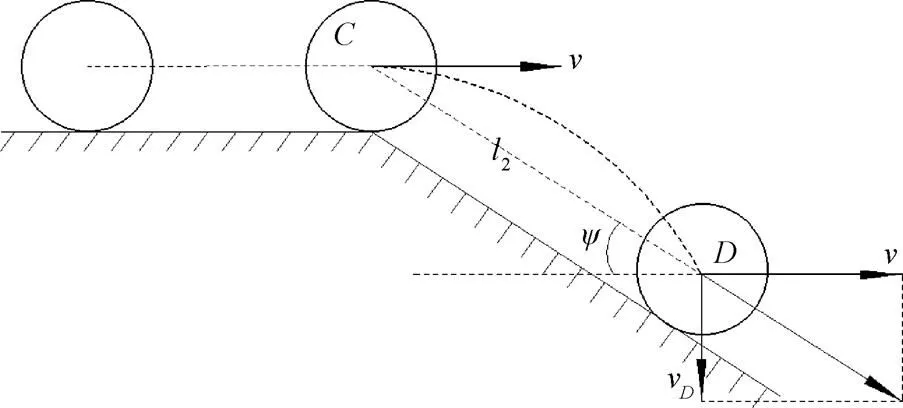
注:l2为仿形轮由C点跳落至D点之间的跳跃距离,mm;ψ为凹陷下坡面与水平面之间的夹角,(°);vD为仿形轮落到D点时垂直方向的速度,m·s-1。
Fig.8Schematic diagram of lower profiling operation
仿形轮由最高点跳落至点的过程中,在垂直地面方向上能量守恒,可以得到式(10)。

仿形轮由点运动到点所用的时间2为
在重力和弹簧压力作用下,仿形轮离开点和到达点时的加速度与分别为
将在点时设为初始条件,同理可得仿形轮落在点时垂直方向的速度为

将式(14)代入式(10)中,利用Matlab软件求解,得出仿形轮由点跳落至点之间的跳跃距离2的表达式。
由跳跃距离2的表达式可知,在下仿形作业时,仿形轮由点跳落至点之间的跳跃距离l随机具作业速度增大而增大,随压紧弹簧的劲度系数和预压缩量增大而减小。
单铰接仿形及收膜机构在上仿形或下仿形时均存在跳跃,导致夹指离开地面不能夹取残膜。因此,在作业速度一定和其他结构参数不变的情况下应适当选用劲度系数大的弹簧,并给予一定的预压紧力。
4 收膜对比试验
4.1 试验条件
1)试验仪器。米尺(0~2 m)、卷尺(0~100 m)、电子称(上海花潮电器有限公司)、相机(佳能数码单反相机EOS700D)。
2)配套动力。选用福田雷沃M800-D拖拉机、标定功率59 kW,要求拖拉机技术状态良好,驾驶员驾驶技术熟练,并了解残膜回收装置的使用和要求。
本试验于2016年10月在新疆建设兵团农八师石河子市145团20连收获后的棉田进行。棉花种植模式为宽窄行密植(660 mm×100 mm×660 mm),株距为85 mm,棉田秸秆已被切碎并清理,地面不平整,土壤硬度适中,滴灌带已回收,在田间滞留的残膜已经有5~6个月左右,大部分地膜位于地表,地膜幅宽为2 000 mm,厚度为0.008 mm,地膜中部和作物根部有覆土,厚度为25~35 mm,地膜有一定程度的破损,动力由福田雷沃M800-D拖拉机提供。根据实际的市场效益和作业效率的问题,机组将试验作业速度设置为5~5.5 km/h,试验场景如图9所示。
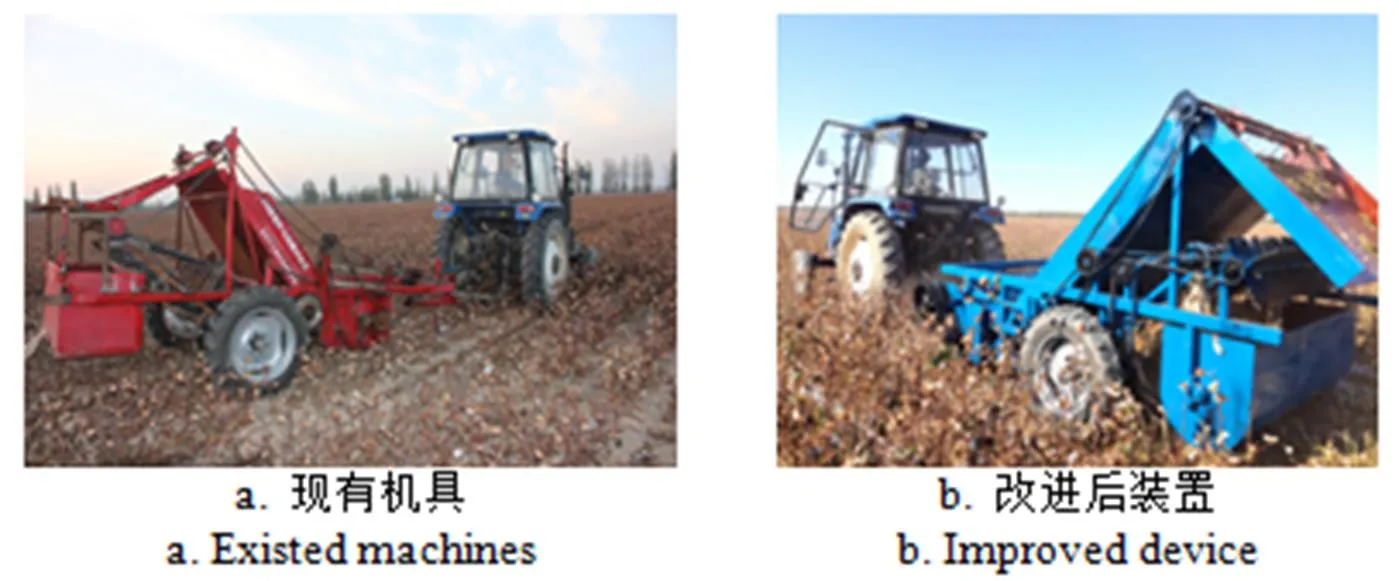
图9 对比试验现场图
4.2 试验方法
本试验选取环境复杂、地表不平整、地表土壤坚实度大的试验田进行试验,将残膜回收率作为主要参数,分A、B两组进行现场对比测试。A组为现有的夹指链式残膜回收装置,田间随机选取5个试验区域进行试验,每个试验区域长度为100 m,宽度为1.8 m,在每个试验区域随机选取5个测试点,每个测试点长度为10 m,宽度为1.8 m,将每个测试点回收的残膜进行整理,并清洗晒干后采用花潮黄金微型天平秤精密电子称(200 g/0.001 g)称其质量,得出该试验区域回收的残膜平均质量1;B组为改进的夹指链式残膜回收装置,田间随机选取与A组不重合的试验区域,其余试验方法与A组相同,得出该试验区域回收的残膜平均质量2,各测试点当年所铺地膜质量=76.47 g。
A组残膜回收率可由式(15)得出,B组残膜回收率可由式(16)得出。
式中1为A组现有的夹指链式残膜回装置的残膜回收率;1为A组各试验区域回收的残膜平均质量,g;为各测试点当年所铺地膜质量,g;2为B组改进的夹指链式残膜回装置的残膜回收率;2为B组各试验区域回收的残膜平均质量,g。
4.3 试验结果
经田间试验测试,结果如表2所示,现有的夹指链式残膜回收装置平均残膜回收率为82.9%,改进的夹指链式残膜回收装置平均残膜回收率达到93.1%,与现有的样机在性能上有明显的提升。残膜回收率的提升主要是单体式仿形装置灵活的仿形性,在先前的基础上又将凸起和低洼地表上的残膜进行了有效的回收。
由试验观察,受作物行间地面不平的影响,机具在作业过程中有一定的颠簸,现有的夹指链式残膜回收装置夹指地面入土划痕不连续,表明夹指入土不连续;改进的夹指链式残膜回收装置仿形轮相对机架有明显的上下起伏运动,作业后地面有夹指留下的较为规整的划痕,表明夹指入土可靠性增强。由仿形轮地面印痕可知,仿形轮经过地面凸起或凹地时没有发生明显的弹跳,主要是因为地面土壤强度低,仿形轮受地面冲击力小,且压紧弹簧始终将其压向地面。经试验,改进的夹指链残膜回收装置残膜回收率有明显的提升。
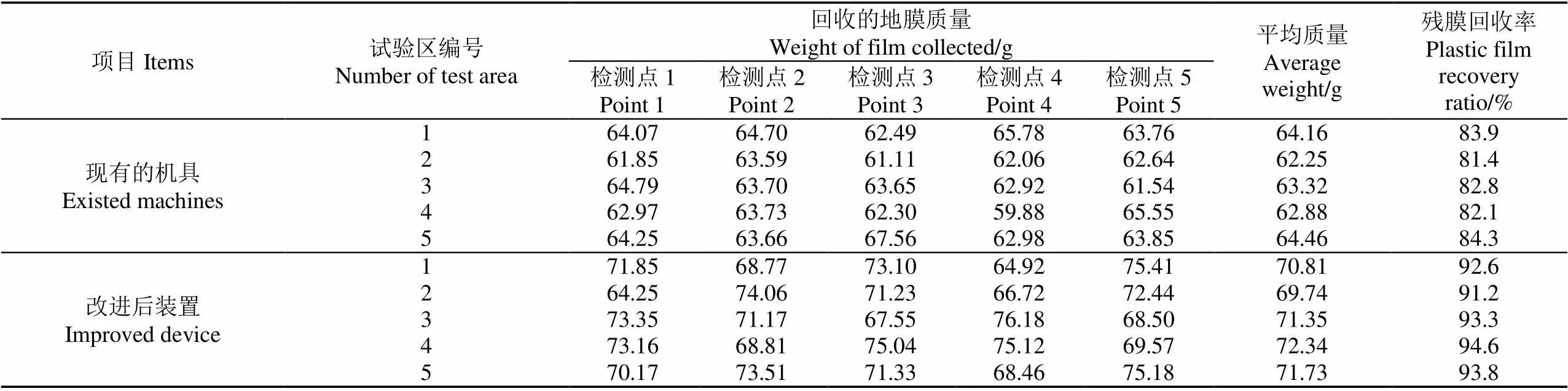
表2 夹指链式残膜回收装置改进前后对比试验数据
5 结 论
1)改进的夹指链式残膜回收装置可以实现每个收膜机构单独对地面进行仿形,在压紧机构的作用下仿形轮随地面高低起伏,使夹指入土仿形受地面不平和机具颠簸的影响减弱,回收残膜可靠性增强。
2)仿形轮与下收膜链轮并排安装,可以防止仿形滞后和仿形过敏现象发生。
3)仿形轮在经过地面凸起和凹地时虽有弹跳,但在地面土壤条件下,仿形轮可以碾压土壤,减弱仿形轮高低起伏运动的惯性,适当调节压紧弹簧的预压力可以避免仿形轮明显的弹跳。
4)样机的田间试验表明,在机具作业速度5~5.5 km/h时,残膜回收率达到93.1%,仿形效果显著,能够满足残膜回收的田间作业要求。
[1] 段文献,王吉奎,李阳,等. 夹指链式残膜回收装置的设计及试验[J]. 农业工程学报,2016,32(19):35-42. Duan Wenxian, Wang Jikui, Li Yang, et al. Design and test of clamping finger-chain type device for recycling agricultural plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 35-42. (in Chinese with English abstract)
[2] 严昌荣,梅旭荣,何文清,等. 农用地膜残留污染的现状与防治[J]. 农业工程学报,2006,22(11):269-272. Yan Changrong, Mei Xurong, He Wenqing, et al. Present situation of residue pollution of mulching plastic film and controlling measures[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(11): 269-272. (in Chinese with English abstract)
[3] 杜晓明,徐刚,许端平,等. 中国北方典型地区农用地膜污染现状调查及其防治对策[J]. 农业工程学报,2005,21(13):225-227. Du Xiaoming, Xu Gang, Xu Duanping, et al. Mulch film residue contamination in typical areas of north China and countermeasures[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(13): 225-227. (in Chinese with English abstract)
[4] 李斌,王吉奎,蒋蓓. 新疆棉区残膜污染及其治理技术[J]. 农机化研究,2012,34(5):228-232. Li Bin, Wang Jikui, Jiang Bei. The plastic film pollution and treatment technology in Xinjiang cotton area[J].Journal of Agricultural Mechanization Research, 2012, 34(5): 228-232. (in Chinese with English abstract)
[5] 王吉奎. 农田残膜回收技术[M]. 杨凌:西北农林科技大学出版社,2012.
[6] 解红娥,李永山,杨淑巧,等. 农田残膜对土壤环境及作物生长发育的影响研究[J]. 农业环境科学学报,2007,26(增刊):153-156. Xie Honge, Li Yongshan, Yang Shuqiao, et al. Influence of residual plastic film on soil structure, crop growthand development in fields[J]. Journal of Agro-Environment Science, 2007, 26(Supp.): 153-156. (in Chinese with English abstract)
[7] 严昌荣,刘恩科,舒帆,等. 我国地膜覆盖和残留污染特点与防控技术[J]. 农业资源与环境学报,2014,31(2):95-102. Yan Changrong, Liu Enke, Shu Fan, et al. Review of agricultural plastic mulching and its residual pollution and prevention measures in China[J]. Journal of Agricultural Resources and Environment, 2014, 31(2): 95-102. (in Chinese with English abstract)
[8] 何文清,严昌荣,赵彩霞,等. 我国地膜应用污染现状及其防治途径研究[J]. 农业环境科学学报,2009,28(3):533-538.He Wenqing, Yan Changrong, Zhao Caixia, et al. Study on the pollution by plastic mulch film and its countermeasures in China[J]. Journal of Agro-Environment Science, 2009, 28(3): 533-538. (in Chinese with English abstract)
[9] 刘建国,李彦斌,张伟,等. 绿洲棉田长期连作下残膜分布及对棉花生长的影响[J]. 农业环境科学学报,2010,29(2):246-250. Liu Jianguo, Li Yanbin, Zhang Wei, et al. The distributing of the residue film and influce on cotton growth under continuous cropping in oasis of Xinjiang[J]. Journal of Agro-Environment Science, 2010, 29(2): 246-250. (in Chinese with English abstract)
[10] 侯书林,胡三媛,孔建铭,等. 国内残膜回收机研究的现状[J]. 农业工程学报,2002,18(3):186-190. Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of research on plastic film residue collector in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(3): 186-190. (in Chinese with English abstract)
[11] 赵海军,史建新. 残膜回收工艺探讨[J]. 中国农机化,2004(6):68-71. Zhao Haijun, Shi Jianxin. Discussion on technology of collecting plastic film residue[J]. Chinese Agricultural Mechanization, 2004(6): 68-71. (in Chinese with English abstract)
[12] 张东兴. 残膜回收机的设计[J]. 中国农业大学学报,1999,4(6):41-43.Zhang Dongxing. Research and design on collector of used plastic film on farm field[J]. Journal of China Agricultural University, 1999, 4(6): 41-43. (in Chinese with English abstract)
[13] 那明君,董欣,侯书林,等. 残膜回收机主要工作部件的研究[J]. 农业工程学报,1999,15(2):112-115. Na Mingiun, Dong Xin, Hou Shulin, et al. Research on main components of the machine for retrieving the used plastic film after harvesting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1999, 15(2): 112-115. (in Chinese with English abstract)
[14] 马少辉,张学军. 废膜收获机的研究现状和发展趋势[J]. 农机化研究,2006,26(5):37-38.
Ma Shaohui, Zhang Xuejun. The rudimental plastic harvesting machinery present condition and developing trend[J]. Journal of Agricultural Mechanization Research, 2006, 26(5): 37-38. (in Chinese with English abstract)
[15] 王学农,史建新,郭俊先,等. 悬挂式棉秆粉碎还田搂膜机搂膜机构的设计与试验研究[J]. 农业工程学报,2008,24(1):135-140. Wang Xuenong, Shi Jianxin, Guo Junxian, et a1. Experimental study and design on film raking mechanism of hanging film raker with cotton stalk crushing and returning to field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 135-140. (in Chinese with English abstract)
[16] 孙兴冻,陈玉龙,罗昕,等. 针对秋后立秆模式的残膜回收机的设计[J]. 农机化研究,2015,37(9):73-76. Sun Xingdong, Chen Yulong, Luo Xin, et al. Design and research of plastic film residue collector used on vertical stem after autumn[J]. Journal of Agricultural Mechanization Research, 2015,37(9): 73-76. (in Chinese with English abstract)
[17] 任萍,罗昕,缑海啸,等. 1MSF-2型立杆时地膜回收机的设计及试验研究[J]. 农机化研究,2016,38(3):106-109,114.
Ren Ping, Luo Xin, Gou Haixiao, et al. Design and experimental study of 1MSF-2 vertical stalk type plastic film recycling machine[J]. Journal of Agricultural Mechanization Research, 2016,38(3): 106-109,114. (in Chinese with English abstract)
[18] 王科杰,胡斌,罗昕,等. 残膜回收机单组仿形搂膜机构的设计与试验[J]. 农业工程学报,2017,33(8):12-20.
Wang Kejie, Hu Bin, Luo Xin, et al. Design and experiment of monomer profiling raking-film mechanism of residue plastic film collector[J]. Transactions of theChinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 12-20. (in Chinese with English abstract)
[19] 卢博友,杨青,薛少平,等. 圆弧形弹齿滚筒式残膜捡拾机构设计及捡膜性能分析[J]. 农业工程学报,2000,16(6):68-71. Lu Boyou, Yang Qing, Xue Shaoping, et al. Design of arc spring-tooth type collector for collecting mulching plastic film the collecting property analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(6): 68-71. (in Chinese with English abstract)
[20] 胡凯,王吉奎,李斌,等. 棉秆粉碎还田与残膜回收联合作业机研制与试验[J]. 农业工程学报,2013,29(19):24-32. Hu Kai, Wang Jikui, Li Bin, et al. Development and experiment of combined operation machine for cotton straw chopping and plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 24-32. (in Chinese with English abstract)
[21] 蒋金琳,龚丽农,王明福. 免耕播种机单体工作性能试验研究[J]. 农业工程学报,2000,16(5):64-66.
Jiang Jinlin, Gong Linong, Wang Mingfu. Study on the working performance of the no-tillage planter unit[J]. Transacting of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(5): 64-66. (in Chinese with English abstract)
[22] 娄秀华,张东兴,耿端阳,等. 残膜回收机起膜器的设计与试验研究[J]. 农业工程学报,2002,18(6):88-90. Lou Xiuhua, Zhang Dongxing, Gen Duanyang, et al. Research and design on loosening shovel of polythene film collector[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(6): 88-90. (in Chinese with English abstract)
[23] 王吉奎,付威,王卫兵,等. SMS-1500型秸秆粉碎与残膜回收机的设计[J]. 农业工程学报,2011,27(7):168-172. Wang Jikui, Fu Wei, Wang Weibing, et al. Design of SMS-1500 type straw chopping and plastic film residue collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 168-172. (in Chinese with English abstract)
[24] 姚宗路,王晓燕,高焕文,等. 小麦免耕播种机种肥分施机构的改进与应用效果[J]. 农业工程学报,2007,23(1):120-124.
Yao Zonglu, Wang Xiaoyan, Gao Huanwen, et al. Improvement and experiment on the device for separate application of fertilizer and seed for no-till wheat drill[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 120-124. (in Chinese with English abstract)
[25] 蒋金琳,龚丽农,王明福. 免耕播种机单体工作性能试验研究[J]. 农业工程学报,2000,16(5):64-65.
Jiang Jinlin, Gong Linong, Wang Mingfu. Study on the working performance of the no-tillage planter unit[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(5): 64-66. (in Chinese with English abstract)
[26] 张晋国,高焕文. 免耕播种机新型防堵装置的研究[J]. 农业机械学报,2000,31(4):33-35.
Zhang Jinguo, Gao Huanwen. Study on the strip chopping anti-blocking mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35. (in Chinese with English abstract)
[27] 胡鸿烈,孙福辉. 单体仿形压轮式播种单组的设计与试验研究[J]. 农业机械学报,1996,27(增刊1):57-61.
Hu Honglie, Sun Fuhui. Study on designing and testing of the drill unit with individual profiling press wheel[J]. Transactions of the Chinese Society for Agricultural Machinery, 1996,27(Supp.1): 57-61. (in Chinese with English Abstract)
[28] 范旭辉,贾洪雷,张伟汉,等. 免耕播种机仿形爪式防堵清茬机构参数分析[J]. 农业机械学报,2011,42(10):56-60.
Fan Xuhui, Jia Honglei, Zhang Weihan, et al. Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 56-60. (in Chinese with English abstract)
[29] 张喜瑞,何进,李洪文,等. 免耕播种机驱动圆盘防堵单元体的设计与试验[J]. 农业工程学报,2009,25(9):117-121.
Zhang Xirui, He Jin, Li Hongwen, et al. Design and experiment on the driving disc of anti-blocking unit for no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2009, 25(9): 117-121. (in Chinese with English abstract)
[30] 李阳,王吉奎,龚贺贺,等. 夹指链式残膜回收机:2015106796692[P]. 2015-12-30.
[31] 秦大同,谢里阳. 弹簧设计[M]. 北京:化工工业出版社,2013:15-54.
罗 威,王吉奎,罗新豫,牛海龙,段文献,李 阳,布尔兰·卡力木别克,毕新胜. 夹指链式残膜回收装置仿形及收膜机构的改进设计与试验[J]. 农业工程学报,2017,33(22):27-35. doi:10.11975/j.issn.1002-6819.2017.22.004 http://www.tcsae.org
Luo Wei, Wang Jikui, Luo Xinyu, Niu Hailong, Duan Wenxian, Li Yang, Burlen·Halembek, Bi Xinsheng. Improved design and experiment of profiling and recycling plastic film mechanism for clamping finger-chain type device of recycling residual plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(22): 27-35. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.22.004 http://www.tcsae.org
Improved design and experiment of profiling and recycling plastic film mechanism for clamping finger-chain type device of recycling residual plastic film
Luo Wei1, Wang Jikui1,2※, Luo Xinyu1, Niu Hailong1, Duan Wenxian1, Li Yang1, Burlen·Halembek1, Bi Xinsheng1,2
(1.,,832000; 2.,832000,)
The existing clamping finger-chain type device of recycling plastic film has the problem of poor profiling quality of film collecting operation and instable work performance, so the profiling and recycling plastic film mechanism with single hinge has been designed. The designed device is mainly composed of 2 parts which are profiling mechanism and film collecting mechanism. Whole film collecting device consists of multiple mechanisms of profiling and recycling plastic film mechanism with single hinge. And profiling can be separately performed when each profiling and recycling plastic film mechanism with single hinge is operating. The profiling mechanism is mainly composed of the profiling frame, the film cutting disc, the profiling wheel, compression mechanism and scraping plate, and so on. The role of the scraping plate is to scrape the soil on the profiling wheel, in order to avoid too much clay on the profiling wheel and the increase in size, which result in insufficient finger insertion depth. The mechanism for collecting residual plastic film is mainly composed of film collecting frame, upper film-collecting sprocket, lower film-collecting sprocket, film collecting chain, clamping finger, supporting wheel and tension mechanism. The front part of the profiling frame is hinged on the frame, and the rear part is hinged on the lower film-collecting sprocket shaft. In addition, the profiling wheel is arranged at the shaft end of the lower film-collecting sprocket. The film cutting disc is fixedly connected to the side of the profiling wheel. Under the effect of compression mechanism and the gravity, the film cutting disc and the profiling wheel roll close to the ground. Because the lower film-collecting sprocket is coaxial with the profiling wheel, the lower film-collecting sprocket is undulating along with the profiling wheel. At the same time, the film collecting frame can move up and down on the supporting wheel. When the clamping finger chain turns around the lower chain sprocket, it has a stabilized distance between the clamping finger and the ground. Then the surface profiling can be completed when the residual film is clamped by the clamping finger. When the profiling wheel and finger chain roll forward, the mechanism for collecting residual plastic film will not be blocked, because there is suitable reserved space between mechanisms for collecting residual plastic film. After the upper and lower profiling operation of the device are analyzed and discussed, the structure size parameters of profiling mechanism are determined. By analyzing the movement of the device, it is concluded that the jump distance from the highest point to the landing point is negatively correlated with the stiffness coefficient of the compression spring, and is positively related to the operation speed of the machine. The experiment was conducted on a test ground with complex field environment, uneven ground and large surface firmness. When the traction speed of tractor was 5-5.5 km/h, the diameter of film cutting disc was 280 mm and the diameter of profiling wheel was 220 mm, the recovery rate of residual plastic film was 93.1%, and the profiling wheel had obvious up and down movement relative to the frame. After the operation of the device, there were regular scratches under the effect of fingers on the surface ground, which indicated that the reliability of finger entering into the soil has been increased. There were no obvious bounce and impresses when the profiling wheel passed the convex and concave on the ground. The profiling hysteresis and profiling hypersensitivity did not occur in the experiment, which indicated that profiling and recycling plastic film mechanism with single hinge can meet the technical requirements of residual film collecting. The research results can be helpful to solve the problem of pollution of residual plastic film.
agricultural machinery; design; films; residual film recovery; single hinged; profiling
10.11975/j.issn.1002-6819.2017.22.004
S223.5
A
1002-6819(2017)-22-0027-09
2017-05-16
2017-08-18
国家自然科学基金资助项目(51465050,51765057)
罗 威,研究方向为农业机械装备创新与性能设计。Email:542164273@qq.com
王吉奎,教授,主要从事农业机械化工程研究。 Email:shzwjk@126.com