船载单脉冲雷达快速标校系统设计与实现
2017-12-14,,,
,, ,
(中国卫星海上测控部,江苏 江阴 214431)
船载单脉冲雷达快速标校系统设计与实现

(中国卫星海上测控部,江苏江阴214431)
当前船载单脉冲雷达幅相一致性标定方法受各类条件的限制,不具备快速标校的特性,一旦设备出现故障或系统更换备件时难以满足系统标校的需求;针对此问题在介绍船载单脉冲雷达幅相一致性标定原理的基础上对传统标校方法进行了分析;基于多模自跟踪体制,建立了天线偏离角与角误差信号关系的数学模型,通过获取目标相对天线角度变化值以及角误差电压变化值,提出了一种幅相一致性快速标定的新方法,并研制了快速标校软件,对设备进行多次标定试验,结果表明标校过程快速简便,满足精度指标,对提高幅相标定效率、克服标定环境局限性等具有重要的现实意义。
单脉冲雷达;快速标校;幅相一致性;船载
0 引言
船载单脉冲雷达一般采用单脉冲双通道或三通道跟踪体制,在该体制下,只有当和、差通道满足幅相一致性时,伺服系统才能完成对目标的稳定跟踪。因此,日常的和差路幅相一致性标校及参数补偿的正确性是影响雷达跟踪性能的重要因素[1]。船载单脉冲雷达的标校分为对塔标校、标定球标校以及模拟器标校,对塔标校是指船在码头或坞内对标校塔进行幅相一致性标校,该方法受制约因素多,且海上无法进行,而标定球标校受天气等因素制约影响大,模拟器标校只能对场放后端的通道进行标校,以上几种方法都受各类条件限制,不具备快速标校的特性[2-4]。本文对船载单脉冲雷达的幅相一致性标校原理进行介绍,在对现有标校方法进行分析的基础上,提出了一种基于天伺馈系统多模自跟踪体制的幅相一致性快速标定新方法,对提高幅相标定效率、克服标定环境局限性等具有重要的现实意义。通过实验验证,证明了该快速标校方法的正确性与有效性,采用该方法标校将极大简化了标校流程,提升了应急处置能力。
1 幅相一致性标定原理
根据单脉冲测角原理,和差信号幅度与角误差关系如下[5]:

(1)
式中,δ为角误差;UΔ为差信号的幅度;U∑为和信号的幅度;kε为比例系数,常数;φ为和差信号之间的相位差,等于0或π。
假设经过中频数字正交采样和幅相补偿后,和信号与差信号分别表示为:
S∑=I∑+jQ∑=UΔejφ∑
(2)
SΔ=IΔ+jQΔ=UΔejφΔ
(3)
根据复平面两矢量夹角公式,角误差结算公式为:
(4)
式(4)中kε是预先装填好的常数,其正确使用的前提是和差3个通道放大增益一致且相位差为0(或π),也称幅相一致性要求。由于器件老化和电气特性难以一致,和差3个通道电气特性在使用过程中会发生变化,不可避免影响到3个通道的幅相一致性,因此在角误差解算前需要进行幅相补偿,即对差支路信号进行幅度和相位关系的调整。
假设差支路相对于和支路增益变化了A倍,相位变化了ψ,此时差支路实际输出为:
S1Δ=I1Δ+jQ1Δ=UΔejφ1Δ=A·UΔej(φΛ+ψ)
(5)
利用公式(4)进行角误差接算时必须对差信号的幅度和相位进行补偿,扣除增益和相位的变化,即:

(6)
(7)
(8)
由此可计算补偿系数A和ψ的值:

(9)
(10)
2 传统幅相一致性标校方法
当前幅相一致性标定主要包含对塔标校法、信标球标校法和模拟器标校法,这几种方法在一定程度上满足了任务需求,发挥了重要的作用,但都存在着自身的局限性。
2.1 对塔标校法
测量船在码头或坞内,可以通过跟踪标校塔上应答机的方式进行幅相一致性标定。该方法受制约因素多,需确保雷达与标校塔之间无遮挡,对场地空间要求高,标校塔上需要人员协同配合完成,标校时间长,工作效率低,且出海期间无法进行。
2.2 信标球标校法
测量船在码头或海上可通过施放跟踪信标球可以完成脉冲雷达幅相一致性标定。雷达天线跟踪上目标后,在方位或俯仰方向对目标进行加偏,进行二次采样平均计算以减少误差。加偏时雷达接收机将A/D转换后的三通道I、Q支路数据通过以太网传至终端计算机,终端计算机相应软件采用平均统计法对这些数据进行处理,并按照式(9)和式(10)的计算方法标定幅相补偿系数。该方法一方面人工干预较多,过程较为繁琐;另一方面受天气等外界环境影响因素多,且准备时间较长,标校的实时性较差。
2.3 模拟器标校法
利用目标模拟器模拟的和路与差路下行信号代替真实信号进行标校的方法称为模拟器标校法。该方法具有实时性强,信号稳定,标校精度高等优点,只需在雷达接收系统与模拟器开机情况下即可实现幅相一致性标校,并可实时监测通道间幅度与相位变化情况,但该方法不包含天线及馈线部分,并不是对雷达系统全向通道进行标校,实际跟踪中无法直接使用模拟器标校出的幅相一致性补偿参数。由于天线及馈线部分是无源器件,稳定性高,不易损坏,该部分的幅相一致性较为稳定,可以将其看作是一个定值;而下行链路其它部分有源器件多,日常出现故障更换的器件均出自该部分,所以设备中幅相一致性修正主要针对场放后端的数字器件。当发现系统幅相不一致,又不满足放球条件时,可根据模拟器相位差变化量,修正当前状态下的幅相补偿系数。
3 快速标校原理
3.1 角误差信号形成原理
目标在空间偏离轴向时产生误差信号的原理如图1所示。其中,天线的辐射中心为O,目标位置为P,目标视轴方向为OP,天线电轴方向为OO’。OO’与OP有一个空间夹角θ,θ即为目标偏离天线电轴方向的任一空间角,φ是天线轴与目标P点构成的平面与水平面的夹角。

图1 单脉冲雷达角误差信号的形成原理
假设来波及天线均为理想的圆极化,则P点目标的信标信号为US=Ue-jwt,与θ、φ无关。P点信号首先在馈源(正交模耦合器)激励起基模TE11,并将它用作和模,这是因为在圆波导中TE11模具有对天线轴向偶对称的方向性图[6]。TE11模在馈源和端口输出为:
U∑(t)=Ucosωt
(11)
式中,ω为信号角频率。
由于目标信号偏离天线电轴方向,在天线馈源的跟踪模耦合器中分别激励起高次模TE21、TM01和TE01。根据电磁波理论[5],TE21模、TE*21模、TM01模和TE01模的天线辐射场表达式分别为式12)—15)。
(12)
(13)
(14)
(15)

经计算后可以得到左旋圆极化和、方位、俯仰通道的辐射电场分别为:
(16)
(17)
(18)
其中:ka、ke分别为方位、俯仰通道的天线方向图差斜率。
理想左旋圆极化来波可用下式来表示:
(19)
根据天线互易原理,分别得到和、方位和俯仰的电压为:
(20)
(21)
(22)
于是,可以分别得到方位和俯仰的角误差电压为:

(23)

(24)
式中,φa、φe分别为方位通道、俯仰通道相对和通道的相位差。
3.2 基于差分法的快速标校技术
雷达天线电轴在不同时刻相对目标的位置不同,可用极坐标(θ,φ)表示电轴位置。在图1中电轴在方位、俯仰方向偏开目标的角度分别为θ·cosφ、θ·sinφ。设t1时刻雷达天线电轴直角坐标为(A1,E1),极坐标为(θ1,φ1),产生的角误差电压为(Va1,Ve1);t2时刻雷达天线电轴直角坐标为(A2,E2),极坐标为(θ2,φ2),产生的角误差电压为(Va2,Ve2)。
则目标在t1至t2时刻相对天线的变化角度为:
(25)
当天线偏转一定角度后,有式(23)和式(24)可得方位、俯仰角误差电压为:
(26)
通过差分,可以得到目标偏离天线的角误差电压变化值为:
(27)
将式(26)代入式(27),可得:
(28)
以方位支路为例,可得到方位通道相对和通道的相位差:
(29)
根据相位差关系以及幅相补偿系数修正前后模不变的原则,可得:
(30)

3.3 动目标标校的指向修正
上述标校方法是以跟踪静态目标为例进行阐述,而在跟踪动态目标过程中天线运动的同时目标位置也发生了变化,那么t1与t2时刻天线指向的角度差已经不能反映两个时刻天线电轴与目标相对位置的变化情况。因此为得到t1与t2时刻天线电轴与目标相对位置的真实变化情况,需要减去因目标运动带来的天线指向上的角度变化。由于当前轨道预报功能已经在航天测控领域中应用较为成熟,对于正常运行的飞行器都可以使用其轨道根数对其运行轨道进行精确预报,根据计算出的数引数据得出不同时刻因目标运动带来的位置的变化。
根据数引数据中的大地方位角和大地俯仰角,可以得出t1时刻轨道预报值(DA1,DE1)与t2时刻轨道预报值(DA2,DE2),用ΔDA和ΔDE来表示t1到t2时刻因目标运动带来的天线指向上的角度变化,则:
(31)
从天线指向变化角度差中将其减去得到t1到t2两个时刻天线电轴与目标相对位置的真实变化情况。因此在动态目标快速标校方案中式(25)需修正为下式:
(32)
3.4 快速标校的船摇修正
船载测控雷达由于工作环境的特殊性,其随载体的运动也在不停地运动,天线的波束范围一般远比船摇幅度小,因此在动平台开展动目标快速标校时,需要进一步消除船摇的影响,以解决动平台快速校相的问题。可根据惯导设备提供的船摇信息将甲板坐标系转换为大地坐标系,得到类似于陆基测控系统的测量坐标系,再进一步消除船摇影响。
4 快速标校系统设计与实现
船载单脉冲雷达快速标校系统设计思路为:从测控网中实时接收脉冲雷达方位角、俯仰角以及相应角误差电压等计算用测量数据,在具备数引数据或惯导数据的条件下自动进行短时间数据积累,再根据目标相对天线的角度差以及相应的角误差电压计算其方位和俯仰的幅相补偿系数,并实时更新定向灵敏度系数,从而实现快速标定功能。其软件工作流程如图2所示。

图2 软件工作流程图
4.1 软件部署位置
快速标校方法需要用到和差通道I/Q值、角误差电压、甲板角、大地角、引导角等数据,在船载雷达系统中,能同时接收处理上述数据的有指显微机和雷达终端设备。考虑到终端设备在跟踪过程中要负责完成数据处理和数据通信功能,数据交换工作量负荷较重,而指显微机仅负责接收和显示各类数据,因此将快速标校软件部署在指显微机上。
4.2 软件结构和流程
标校软件采用Delphi语言编写,主要用于进行标校过程的数据接收和数据处理。软件界面如图3所示。

图3 软件界面
4.2.1 数据接收模块
该功能通过导入中心机数据或者网络接收,将雷达系统测角数据、中心机数引数据、惯导数据存入缓冲区内。利用网络初始化函数创建网络接收Socket并绑定,设置组播属性,利用WSAAsyncSelect设置网络接收为消息触发。
4.2.2 数据处理模块
根据目标特性、船摇幅度人工选择合适的角度数据来源:甲板角(适用于静态目标、船摇较小)、大地角(适用于静态目标、船摇较大)、数引数据(适用于动态目标、船摇较大)。
1)点击“开始标定”后,开始处理缓冲区内的数据。
2)根据角度数据来源,进行角度数据预处理,其中选择“甲板角”不作处理;选择“大地角”则将甲板角、惯导数据时间码对齐,并计算大地角;选择“数引”将甲板角、数引数据时间码对齐,并将甲板角与数引数据比较,得到差值。
3)角度数据预处理后,调用函数进一步处理。首先将预处理后角度数据、误差电压数据进行差分,然后数据筛选,主要根据和差通道I/Q幅值、变化范围判断目标是否在天线主波束内。筛选后剩下认为是数据有效点,根据数学模型计算此时间点的相位差、幅值。调用函数统计平均值并剔除。
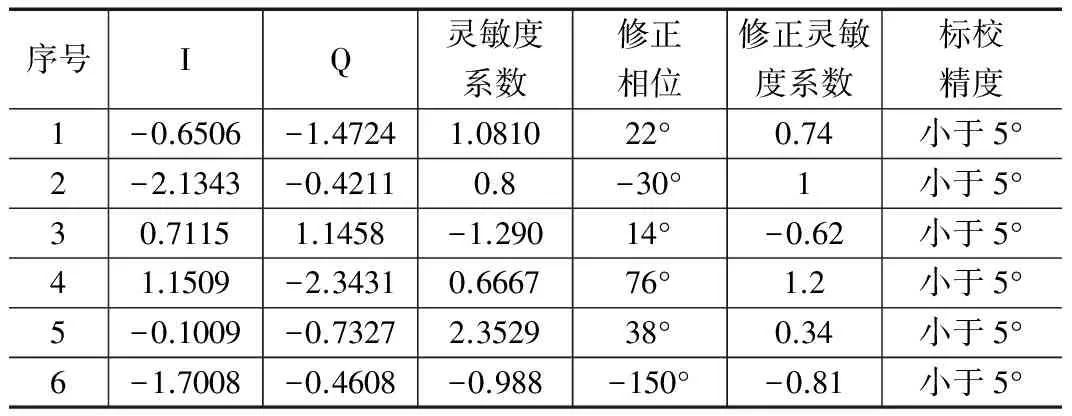
表1 试验数据统计表(方位)
(4)将计算结果存入内存变量中,根据数学模型计算相位调整量、幅值调整量。
5 试验结果和分析
5.1 快速标校流程
1)雷达显示计算机加载任意和差通道初始值。
2)伺服主控台控制天线对准目标,确保目标在天线波束主瓣内。
3)启动标校软件,点击新校软件界面“开始标定”按钮,伺服主控台在确保目标始终处于主波束内的前提下,可以任意转动方位和俯仰。计算3~5秒后,新型标校软件直接得出方位、俯仰通道幅相补偿参数,点击“停止标定”按钮停止标校,伺服主控台停止转动天线。
4)确认标校结果正常后,将幅相补偿参数供雷达显示计算机加载使用。
5)伺服主控台根据更新的幅相补偿参数控制天线进行线性检查和定向灵敏度检查;若仍有交叉耦合存在,则重复步骤3)~4)。
5.2 试验数据分析
快速标校系统设计完成后,对设备进行多次标定试验,标定过程快速准确,应用效果良好。此时无需天线跟踪目标,只需天线主瓣对准目标即可迅速标定补偿参数。在软件使用过程中,界面简洁明了,操作方便,输出的补偿参数准确,可直接作为跟踪方式下幅相补偿的输入参数进行通道的补偿。应用该系统后可随时在跟踪目标前检验系统幅相一致性,解决了测量船海上标校对信标球的依赖。下面选取部分试验数据如下表所示(以方位为例),从表中可见标定结果满足精度要求。
6 结论
本文分析了船载单脉冲雷达幅相一致性标校方法的原理和应用局限性,通过建立天线偏离角与角误差信号关系的数学模型,通过获取目标相对天线角度变化值以及角误差电压变化值,提出了一种标定幅相补偿系数的新方法。运用该方法海上标校时不再局限于跟踪信标球,克服了天气因素对标校的制约,可在跟踪实际目标前对幅相补偿参数进行快速的标定和检查。大大简化了传统的幅相一致性标定流程,丰富了脉冲雷达标校手段,有效提升了雷达系统抗风险能力。
[1] 朱鸿熙. 振幅和差单脉冲雷达幅相一致性及校准分析[J] . 信息化研究, 2011,37 (4):18-20.
[2] 程 钧,钟 岚. 单脉冲雷达系统幅相一致性自动化标定的实现[J]. 现代雷达, 2007, 29(4):28-30.
[3] 宋石玉,刘 咏. 单脉冲雷达海上幅相一致性标定方法初探[J] .科学技术与工程, 2011, 11(9):2114-2116.
[4] 卢长海. 脉冲雷达幅相一致性快速标定方法研究[J] . 电子测试, 2015(19):49-51.
[5] 汪泉弟,罗宏伟. 旋转抛物面天线馈源相位中心的仿真分析[J] .重庆大学学报(自然科学版),2013, 36(4):45-50.
[6] 张江华,刘逸平,杜自成. 单脉冲雷达测角特性分析[J]. 火控雷达技术,2005, 34(2):55-58.
DesignandImplementonQuick-CalibrationSystemofShip-borneMono-pulseRadar
Song Haijun, Ding Qiuqi, Su Yan, Jiang Zhiyu
(China Satellite Maritime Tracking and Control Department, Jiangyin 214431,China)
The calibration method of amplitude-phase of ship-borne mono-pulse radar is limited by all kinds of conditions, so it is difficult to meet the requirement of system calibration if the equipment fails or the replacement of space parts. In this paper, the theory and design of mono-pulse radar amplitude-phase calibration are introduced and the traditional methods of amplitude-phase calibration are analyzed. Based on the system of multi-mode tracking, the mathematical model of the relation between deviation angle and error voltage is built. Through obtaining the variation value of deviation angle and error voltage, a new method is determined and a rapid calibration software is developed, which is used to calibrate the amplitude and phase consistency. The experiment results show the calibration process is fast and simple.It has important practical significance for improving the efficiency of amplitude-phase calibration, as well as overcoming the limitation of the calibrating environment.
mono-pulse radar; quick-calibration; amplitude-phase consistency; ship-borne
2017-02-22;
2017-03-31。
宋海军(1972-),男,江苏江阴人,工程师,主要从事航天测控系统方向的研究。
1671-4598(2017)09-0095-04
10.16526/j.cnki.11-4762/tp.2017.09.025
TN953.3
A
