带移动负载海上浮筒系统运动响应特性初步研究
2017-12-12吴宝山
吴宝山,吴 澜
(中国船舶科学研究中心水动力学国家重点实验室,无锡214082)
带移动负载海上浮筒系统运动响应特性初步研究
吴宝山,吴 澜
(中国船舶科学研究中心水动力学国家重点实验室,无锡214082)
将某类海上自动作业系统简化为带移动负载的浮筒系统,其中负载简化为外径为180mm、约50kg重的柱型体,浮筒为外径533mm的圆筒;初步设计了浮筒系统的主参数。在此基础上,采用频域数值模拟计算,获得了浮筒自由状态下的固有周期和运动响应传递函数 (RAO);再采用时域模拟方法,预报了3级海况下(JONSWAP谱)浮筒系统整体的运动响应特性,给出了运动响应幅值、最小干舷高度等特性参数,可为相关装备设计提供技术参考和借鉴。
海上浮筒;移动负载;运动响应
0 引言
海上浮筒具有结构简洁、耐波性能良好、成本低等优势,广泛应用于海洋环境监测、波浪发电等。1977年Woods Hole研究所Berteaux[1]综合分析了浮筒的性能。Mavrakos等[2]通过数值模拟和试验证明设置浮筒可改善系泊缆动力特性。Carpenter等[3]对圆柱形浮标和圆盘形浮标在随机波下的响应进行数值模拟和试验,发现圆柱形浮标对涌浪的垂荡响应较大,圆盘形浮标对涌浪的横摇响应较大。Leonard等[4-5]对球形、柱形、圆盘形3种浮标在波浪中响应的数值解和试验结果进行了对比。曲少春[6]等建立了浮标在波浪激励下的运动方程,计算了不同海况下浮标的运动参数输出。孙辰[7]设计了某小型深海资料浮标,并进行了浮标水动力学仿真。
本文针对某类海上自动作业系统,将其简化为带移动负载的浮筒系统,其中负载简化为外径180mm、约50kg的柱型体,浮筒为外径533mm的圆筒。经过初步设计,确定浮筒系统的主参数,建立浮筒系统水动力模型,并对其在波浪中的运动性能进行分析,结果表明该系统在3级海况下运动性能良好,可作为稳定的海上自动作业平台。
1 浮筒系统主要参数
本文简化设计的带移动负载的浮筒系统示意图见图1,其中b为浮筒,简化为中空的圆柱体;负载p简化为实心圆柱体,承载于浮筒中空的内部结构上,可上下滑动。参考浮标设计相关标准[8],设计确定浮筒和负载的主要参数见表1。
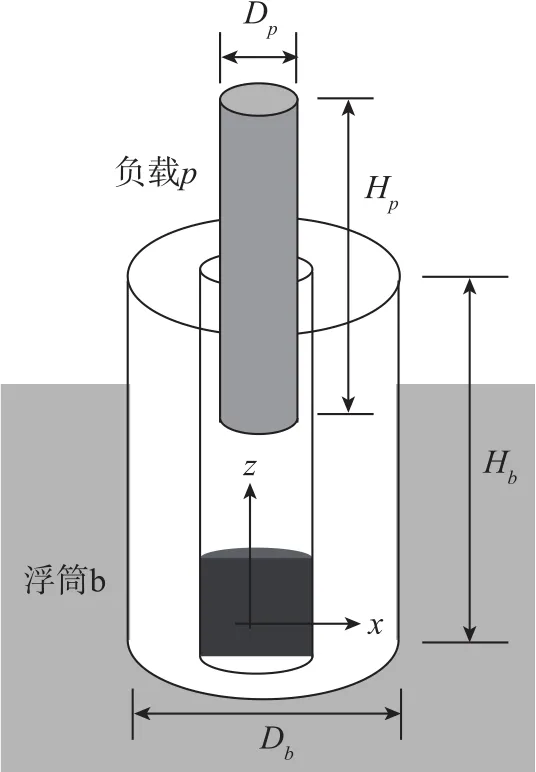
图1 浮筒系统示意图Fig.1 Diagram of buoy with moving payload

表1 浮筒和负载主参数Tab.1 Particulars of buoy with moving payload
负载上下滑动会影响浮筒系统整体的运动特性。本文采用准静态假设,选取负载进入浮筒深度分别为H p/4、H p/2、3H p/4、H p的状态,分析浮筒系统整体的运动特性。各负载进深状态下的浮筒系统整体重心、浮心及初稳性高的计算结果见表2。负载进深3H p/4时的初稳性高最小(0.51m),为正值且较大,符合初稳性平衡条件。

表2 不同进深下浮筒系统重心、浮心和初稳性高Tab.2 Centers of gravity and buoyancy of buoy with payload moving
2 浮筒系统运动响应计算方法
进行浮筒装置运动响应分析时采用势流理论,流场中的速度势存在并满足Laplace方程和4类边界条件:自由面条件、浮体湿表面条件、海底条件和辐射条件。
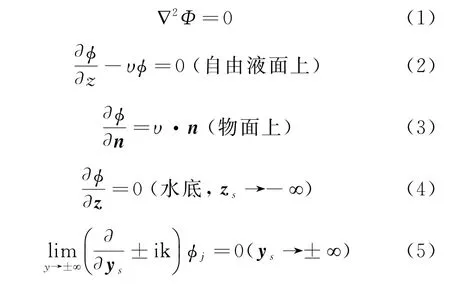
其中,ϕ为速度势,υ是浮体运动的线速度,n为湿表面上单位法线向量,指向浮体内部。
根据Laplace方程和边界条件可以唯一确定速度势,再按照Bernoulii公式计算物体湿表面上的压力分布:

将压力分布P在浮筒湿表面积分,可以得到其受到的波浪激励力F j。

将波浪力代入浮筒系统运动方程 (8)进行频域计算[9-10]:

其中,M为惯量矩阵,Ma为附加质量系数矩阵,C为线性阻尼系数矩阵,K为静水力恢复系数矩阵,F为单位波幅下的1阶波浪力,X为1阶运动响应RAO,表征浮筒系统随频率变化的运动响应特性。
对浮筒装置进行时域水动力预报时,根据运动方程 (9),调用由频域计算得到的附加质量、单位波长的绕射力、漂移力等数据,计算在给定波谱条件下的运动时历[11-12]:

其中,Fsv为漂移力,Fwf为绕射力,Fh为静水恢复力。给定浮筒的初始位置和速度,每个时间步计算出浮筒受到的外力,根据式 (9)计算加速度,进而通过积分获得浮筒的速度和位移,作为下一时间步的输入,迭代求解,得到浮筒系统的运动响应时历。本文的分析计算采用JONSWAP谱:
3 浮筒系统运动响应分析
3.1运动响应RAO结果分析
采用频域计算方法,对不同负载进深下浮筒系统的运动响应进行预报,得到垂荡、摇摆附加质量和阻尼 (图2、图3),垂荡和摇摆运动响应RAO如图4所示,垂荡和摇摆运动周期如表3所示。由表3可知,浮筒系统的摇摆和垂荡周期最大分别为2.84s和3.10s,避开了波浪的谱峰周期。
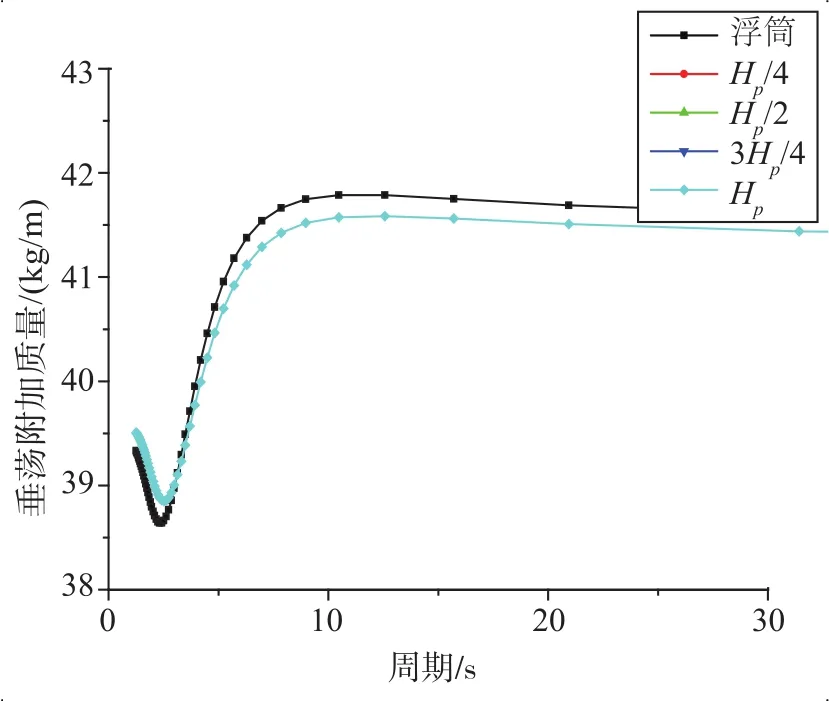
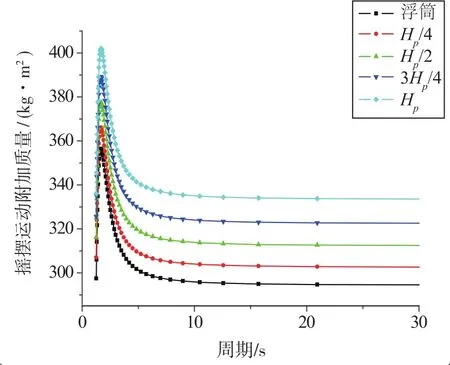
图2 不同负载进深状态浮筒系统附加质量Fig.2 Added mass of buoy with moving payload

图3 不同负载进深状态浮筒系统辐射阻尼Fig.3 Radiation damping of buoy with moving payload
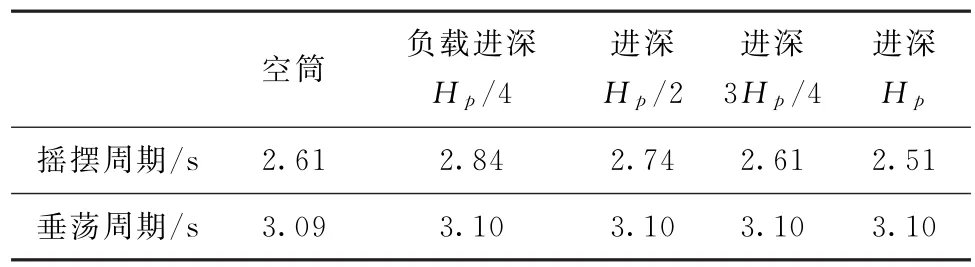
表3 不同负载进深下浮筒系统的固有周期Tab.3 Natural cycle of buoy with moving payload in calm water

图4 不同负载进深状态浮筒系统RAOFig.4 RAO of buoy with moving payload
3.2 运动响应时历结果分析
对不同负载进深下浮筒系统在波浪中的运动进行时域计算,将浮筒系统作业海况设定为3级,采用JONSWAP谱,有义波高1.25m,谱峰频率为0.881rad/s。负载进深H p/4状态下的浮筒系统垂荡和摇摆运动时历曲线见图5~图7。对各状态的运动时历曲线进行统计分析,结果如表4所示。
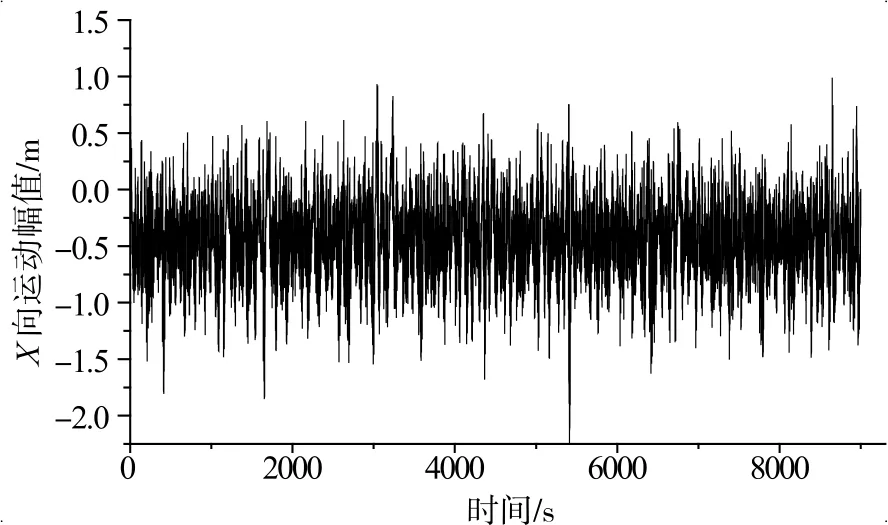
图5 浮筒系统横向运动时历曲线(负载进深H p/4)Fig.5 Typical time history of lateral motion of buoy system
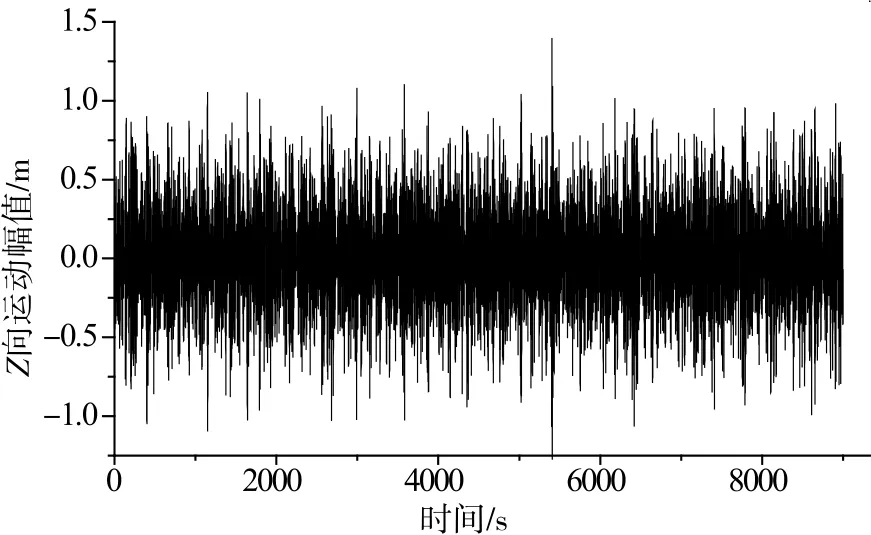
图6 浮筒系统垂向运动时历曲线(负载进深H p/4)Fig.6 Typical time history of vertical motion of buoy system

图7 浮筒系统垂向运动时历曲线(负载进深H p/4)Fig.7 Typical time history of rolling motion of buoy system
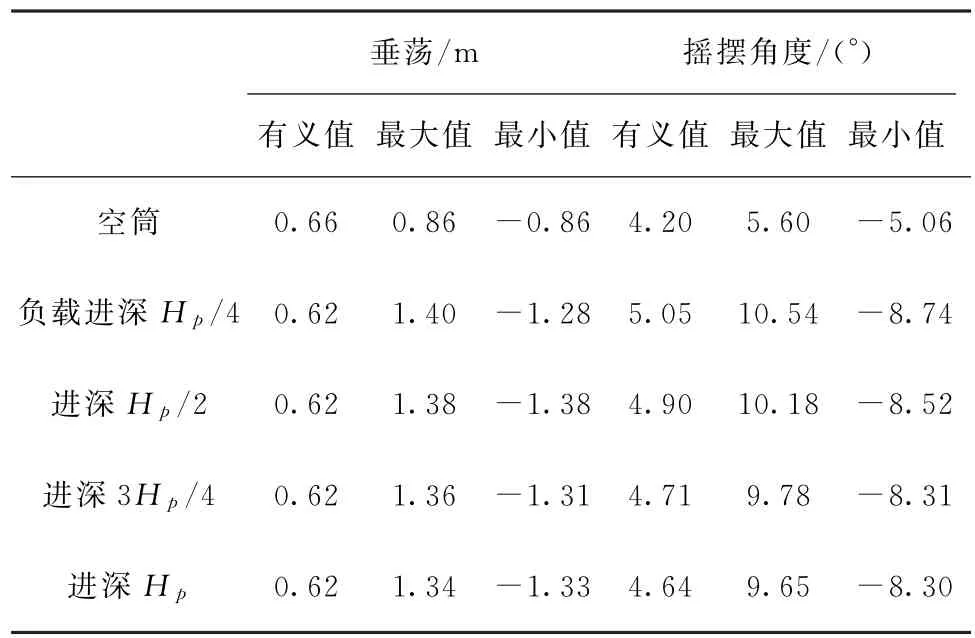
表4 不同进深下浮筒系统运动响应统计值Tab.4 Statistic parameters of motion of buoy system
由表4可知,随着负载进深的增加,重心位置降低,稳性高和恢复力矩增大,浮筒系统纵摇角度逐渐减小。负载进深H p/4时,浮筒纵摇响应最大,幅值为10.5°。参考相关设计标准[8]的规定(建议最大摆角不超过15°),该方案中浮筒系统在波浪中的运动响应能够满足要求。
为评估浮筒在波浪中摇摆位移幅值大小,需要对浮筒在XZ面的摇摆运动特点进行分析。负载进深H p/4时,在距离浮筒底部不同高度处布置6个监测点,计算得到的不同监测点摇摆过程中偏离初始位置的线位移幅值见图8。

图8 浮筒沿高度不同测点处位移幅值 (有义值)Fig.8 Displacement amplitude of different positions along buoy's vertical centerline
从图8可看出,浮筒在波浪中运动时底端 (高度0m)的摇摆幅度最大,浮筒顶端(高度2.6m)最小。不同负载进深的状态下,浮筒端部的摇摆位移统计值结果见表5。由表5可知,随着负载进深增大,浮筒摇摆线位移变化不大。

表5 不同进深下浮筒最大摇摆幅值Tab.5 Maximum displacement amplitude of buoy system
3.3 浮筒最小干舷分析
通过时域计算,可得到浮筒与波面实时的相对运动。波面在浮筒表面的相对爬升高度为理论的最小干舷高度。不同负载进深时计算得到的浮筒最小干舷结果如表6所示。

表6 不同负载进深下浮筒装置最小干舷Tab.6 Minimum freeboard of buoy system
由表6可知,浮筒所需最小干舷随负载进深的增加而减小,设计浮筒最小干舷取决于负载进深H p/4时的状态。针对3级海况作业条件,浮筒的干舷不应小于0.282m。但本文的结果是基于线性计算分析,没有考虑波面的非线性爬升和波浪本身的非线性等因素,也没有考虑波浪的飞溅,因此,实际干舷高度的选取需在此基础上留有足够的安全余量。
4 结论
1)针对设计的带有移动负载的浮筒方案,预报了浮筒系统整体在3级海况下的垂荡运动最大幅值1.40m,摇摆运动最大幅值10.54°,具有较为良好的运动响应特性。
2)随着负载进入浮筒深度增大,浮筒摇摆角度减小,垂荡运动变化不大。
3)浮筒系统所需最小干舷随着负载进深的增大而减小,设计中应参考负载进深最小的工况确定浮筒的最小干舷。
[1] Berteaux H O.Buoy engineering[M].New York: A Wiley Imterscience Publications,1976.
[2] Mavrakos S A,Neos L,Papazoglou V J.Systematic evaluation of the effect of submerged buoys'size and location on deep water mooring dynamics[C].Proceedings of the 4thInternational Symposium on Practical Design of Ships and Mobile Units(Varna,Bulgaria),1989:1-8.
[3] Jenkins C H,Leonard J W,Walton J S,et al.Experimental investigation of moored-buoys using advanced video techhiques[J].Ocean Engineering, 1995,22(4):317-335.
[4] Carpenter E B,Idris K,Leonard J W,et al.Behaviour of a moored discus buoy in an ochi-hubble wave spectrum[C].International Conference on Offshore Mechanics An Arctic Engineering(Huston),1994:492.
[5] Leonard J W.Idris K,Yim S C S.Large angular motions of tethered surface[J].Ocean Engineering, 2000,27(12):1345-1371.
[6] 曲少春,郑琨,王英民.圆柱形浮标运动分析与仿真[J].计算机仿真,2010,27(6):363-367.
[7] 孙辰.“白龙”浮标标体设计及动力学分析[D].杭州:杭州电子科技大学,2014.
[8] 中华人民共和国交通运输部.浮标通用技术条件:JT/ T760-2009[S].北京:人民交通出版社,2009.
[9] 吴澜,吴宝山,匡晓峰,等.基于AQWA的半潜式平台水动力特性研究[J].中国海洋平台,2014, 29(5):29-33.
[10] 吴澜,匡晓峰,范亚丽.半潜平台浮子式系泊系统参数优化研究[J].海洋工程,2016,34(4):30-37.
Characteristics of Response of Buoy with Moving Payload at Sea
WU Bao-shan,WU Lan
(National Key Laboratory of Science and Technology on Hydrodynamics, China Ship Scientific Research Center,Wuxi 214082,China)
Some kind of operation system at sea was simplified to a buoy with a moving payload inside,where the buoy is a floating cylinder with outer diameter of 533mm and the payload a cylinder with outer diameter of 180mm and weight of 50kg.Such a buoy system is designed to operate under the sea state 3 with adequate stability.Its natural cycle in calm water and RAOs of motion in waves are calculated by numerical simulation with frequency domain method.Thereafter,the time history of motion of the buoy system under the sea state 3 was obtained through time domain method,where the JONSWAP wave spectrum was adopted.As results,the amplitudes of buoy's motion are presented and the buoy's freeboard recommended.
Freeboard of buoy;Motion response;Buoy with moving payload
P751
A
2096-4080(2017)04-0008-06
2017-09-14;
2017-10-30
水动力学重点实验室基金(61422030209162203002);工信部数值水池创新专项
吴宝山(1968-),男,博士,研究员,主要研究方向为船舶与海洋工程水动力学。
吴澜(1988-),女,硕士,工程师,主要研究方向为船舶与海洋工程水动力学。E-mail:wulan135@126.com