基于水平湿拖的TLP平台张力腿现场扶正数值模拟
2017-12-11苗春生叶永彪石锦坤陈晓东
苗春生,孙 锟,叶永彪,石锦坤,陈晓东
(深圳海油工程水下技术有限公司,广东 深圳 518067)
基于水平湿拖的TLP平台张力腿现场扶正数值模拟
苗春生,孙 锟,叶永彪,石锦坤,陈晓东
(深圳海油工程水下技术有限公司,广东 深圳 518067)
TLP平台张力腿安装方法有竖直安装和水平安装。以一TLP平台张力腿为例,基于张力腿水平湿拖安装方法,采用OrcaFlex软件建立扶正分析模型,数值模拟了张力腿现场扶正过程,研究分析了张力腿在不同海洋环境和吊机缆绳释放速度等参数下的动力响应,并在此基础上进行了集束扶正分析,根据安装接受标准确定了合适的扶正作业天气窗口。模拟分析结果表明:在扶正过程中,浪向/流向、波高、流速对张力腿应力影响显著;吊机缆绳张力对浪向/流向、流速敏感;吊机缆绳释放速度对张力腿应力和吊机缆绳张力影响微弱。
张力腿安装;水平安装方法;扶正分析;OrcaFlex模拟;张力腿平台
张力腿平台(tension leg platform, 简称TLP)因其张力腿式系泊系统,具有较好的升沉运动性能,在海洋油气开发中获得了广泛应用。早期张力腿分段储存在TLP如Hutton、Snorre的某些舱室内,和平台一起运输到安装地点;Jolliet 和Heidrun平台张力腿则采用陆地焊接,经过表面湿拖、现场扶正完成安装;除了Jolliet和Heidrun平台,大部分TLP的张力腿使用重型起重船竖直逐节连接下放[1-3]。由于重型起重船租金成本高、数量有限,这种安装方式易给TLP项目带来成本和工期的挑战。另外,张力腿分段长度受到吊机吊高的限制,而随着作业水深的增加,需要连接的张力腿分段数量增加,进一步增大作业风险和作业成本。
为了降低作业风险和成本,相关学者研究了张力腿水平安装方法。Ishikawa等[4]利用数值仿真和模型实验的方法对张力腿的水平湿拖和现场扶正进行研究。Galgoul[5]基于Auger平台张力腿的参数,进行张力腿集束湿拖和单根现场扶正方案研究,探讨了这种水平湿拖扶正安装方法的可行性。Li等[6]提出了一种水平安装张力腿的方法。这种方法采用水平方式在驳船上进行逐节组装,通过驳船尾部托管架逐节拖曳入水,直至完成整个张力腿的组装和入水,然后拖曳到作业地点进行扶正操作,最后完成底部与桩基连接和上部临时浮筒安装工作。
对于张力腿水平湿拖安装方法,必须要考虑张力腿整体湿拖的可行性,其中湿拖疲劳损伤评估和扶正可行性评估是这种安装方法两个重要的关键力学问题。对于湿拖疲劳损伤评估,可通过OrcaFlex软件模拟,计算给定海况和拖航速度下,张力腿湿拖的动力响应,然后利用雨流计数法和S-N曲线计算得到张力腿的疲劳破坏,其中浮筒的分布、波高、浪向、拖航速度等因素均会影响张力腿的累积疲劳破坏程度[7]。对于张力腿扶正可行性评估,扶正是一个细长体结构的大变位过程,其受力特性区别于正常服役时,一旦在扶正过程中发生破坏,后果严重。为此以某油田张力腿平台为例,开展水平湿拖后张力腿现场扶正的研究工作,通过数值方法模拟张力腿扶正过程,研究分析其在不同海洋环境和吊机缆绳释放速度等参数下的动力响应,并给出合适的扶正作业天气窗口,为张力腿的水平安装分析提供参考。
1 扶正分析模型
1.1扶正过程
区别于竖直逐节连接和托管架下放的安装方法,水平湿拖安装方法首先在陆地进行单根张力腿的预制和焊接,将单节钢管连接成整根张力腿,再使用两艘拖轮连接单根张力腿的首尾两端,水平拖航至目标油田后,然后进行张力腿的扶正,并安装至海底桩基中。对于张力腿扶正安装,其过程描述如下(如图1所示):
1)主辅安装船和主尾拖船完成张力腿的交接,完成扶正相关准备工作;
2)主辅安装船吊机分别连接张力腿顶端和底端,同步释放绞车绳索和移动辅安装船;
3)当张力腿完全扶正,最终处于直立状态,由ROV解脱张力腿下端连接索具;
4)解脱张力腿剩余拖航浮筒,并在张力腿顶端安装临时支撑浮筒(tendon support buoy, 简称TSB);
5)主安装船移动到海底基础上方,完成张力腿与海底基础的连接。

图1 张力腿现场扶正示意Fig. 1 Tendon upending illustration
1.2张力腿结构
TLP系泊系统张力腿个数一般为4×4、4×3、4×2、3×2[1],主要取决于平台上部结构形式、排水量和作业水深等,以4×3、4×2形式居多。单根张力腿一般由顶部连接构件(tendon top section, 简称TTS)、主体(main body, 简称MB)及连接件(tendon connector)和底部连接构件(tendon bottom section, 简称TBS)组成。张力腿顶端通过顶部构件连接至平台主体,下端通过底部构件与桩基连接。最早Hutton平台张力腿主体构件使用薄壁铸造管道,两端带有螺纹,现在主要使用莫林机械连接器实现连接[2]。主体构件管道管径和壁厚的确定尽可能使浮力接近中性以便于安装。对于浅水平台,可使用均一壁厚的钢管;对于深水平台,考虑使用变壁厚或者变外径的钢管或者高强复合材料[8-9]。某油田TLP平台每根张力腿均为常压钢质圆管,其外径为40英寸,顶部构件和底部构件的壁厚为1.6英寸,而主体钢管结构的壁厚为1.5英寸,单根张力腿长度约为371.495 m。计算模型的每一段构件的长度、弯曲刚度、轴向刚度和扭转刚度等信息如表1所示。

表1 张力腿计算模型参数Tab. 1 TLP tendon numerical model parameters
1.3扶正模型
张力腿扶正静力和动力分析所采用的软件为OrcaFlex 9.8d[10]。扶正模型包括:主安装船(main installation vessel, 简称MIV)、辅安装船(secondary installation vessel, 简称SIV)、单根张力腿、浮筒、MIV吊机缆绳、SIV吊机缆绳释放绞车等,如图2所示。

图2 张力腿扶正分析模型Fig. 2 Tendon upending analysis model
单根张力腿具有负浮力,为了维持湿拖过程中张力腿在水中的位置和较低的应力,设置5个浮筒:首尾两个,中间三个。在现场扶正操作之前,拆除首尾两个浮筒,因此扶正模型中间浮筒参数说明如表2所示。

表2 中间浮筒参数Tab. 2 Middle buoy parameters
2 扶正分析方法
2.1系统控制方程
整个系统的控制方程:

式中:M(p,a)为整个系统所受到的惯性力;C(p,v)为整个系统所受到的阻尼力;K(p)为整个系统所受到的回复力;F(p,v,t)为整个系统受到的外部载荷;p,v,a分别为位移、速度、加速度矢量;t为时间。
整个系统的研究对象为包括张力腿在内的细长体结构,采用集中质量法将细长体结构划分为多段,每段有两个质量点,每一分段的质量、重量、浮力等性质的一半分别施加到两端的质量点上,质量点之间采用自由伸缩且可以扭转的弹簧相连模拟轴向刚度和扭转刚度,分段和质量点之间采用转动弹簧模拟弯曲刚度[11]。海洋环境作用在细长体结构和浮筒的载荷可划分为惯性力项和拖曳力项,采用莫里森公式计算,Cd和Cm取值参考DNV RP H103(2014)附录A和附录B规定选取。辅安装船吊机缆绳采用张力绞车和线结构的组合定义。主辅安装船以运动边界形式作为输入数据,需输入指定浮态下的RAO运动数据。海洋环境仅考虑波浪和海流的作用,波浪和海流的方向设置相同。波浪采用规则波和不规则波两种方式进行定义,具体见小节2.4。
静力分析可分为两个步骤:1)给定主辅安装船的初始位置,并为细长体结构选择合适的空间形态计算方法(如悬链线方法),从而计算获得系统初始空间形态;2)在考虑所有外力载荷作用之后进行全静力分析,由初始空间形态不断迭代更新位置,进而消除在自由物体(如质量点、浮筒等)上的不平衡力,确定系统的最终静态平衡空间形态。
动力分析以静力分析计算结果作为初始输入,推荐采用隐式积分方法,选取合适的时间步长,在每个时间步长不断迭代计算系统的空间形态,充分考虑了几何非线性因素,包括波浪载荷和接触载荷等的空间变化,从而获得整个系统的响应时间历程。
2.2分析步骤描述
扶正开始时张力腿处于水平状态海平面以下15 m附近,主安装船的位置和吊机缆绳长度保持不变;然后辅安装船匀速不断释放吊机缆绳,并以一定的速度向主安装船靠近。为了考虑吊机缆绳的下放长度变化,对于任一环境工况,时域计算分为6个步骤进行,如表3所示。
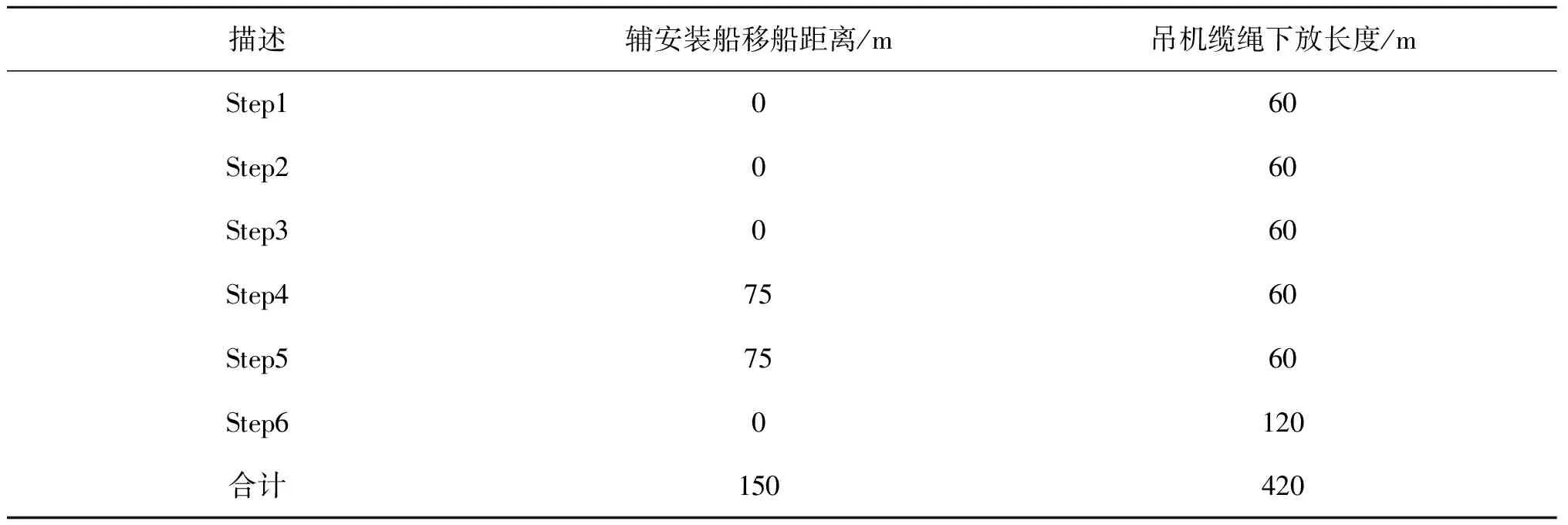
表3 分析步骤描述Tab. 3 Analysis step description
2.3主辅安装船舶
主辅安装船的主尺度参数如表4所示。

表4 安装船舶主尺度Tab. 4 Main parameters for installation vessels
在执行动力分析时,船舶运动边界条件仅考虑各自的一阶波浪运动响应,规则波所输入的船舶6个自由度运动响应可表示为
其中,x为船舶运动响应,R、φ为RAO幅值和相位,a、ω分别为波幅和频率,t为时间。
不规则波下船舶的6个自由度运动响应可以通过多个不同的规则波下船舶运动的叠加确定。
2.4海洋环境
该油田作业水深为405~408 m,分析中波浪参数:平均跨零周期(Tz)5~8 s、有效波高(Hs)1.5~2.5 m。

由于扶正操作中张力腿易受到海流和内波的影响(这里以孤立流的形式考虑内波),故分析时使用一年一遇海流和一年一遇孤立流,见图3。以主安装船为参考,定义浪向如图4所示。

图3 流速剖面Fig. 3 Current profile

图4 波浪方向Fig. 4 Wave direction
2.5安装接受标准
1)张力标准
在扶正过程中,要求主辅安装船的吊机缆绳最大张力不超过船舶作业能力。
2)应力标准
在扶正过程中,要求张力腿的最大应力不超过 0.6 倍的应力屈服极限[12-13]。
3 分析结果
3.1海况敏感性分析
图5至图7为单根张力腿扶正不规则波和规则波下对比结果。不规则波计算结果较为光顺,规则波计算结果偏于保守。根据规则波计算结果,适合现场扶正的作业窗口为有效波高在2.0 m以下、0°-30°和150°-180°浪向、一年一遇流。张力腿应力对波高和环境方向的变化敏感,而主辅安装船吊机缆绳最大张力对环境方向的变化敏感。横浪时这三项结果均比顺浪时要大。由图8可知,扶正刚开始时,张力腿处于水平状态,此时张力腿最危险,易出现应力极值。由图9可知:在横浪作业情形下,扶正刚开始时,辅安装船吊机缆绳系统可能会发生共振,导致张力极值出现;在扶正即将结束时,主安装船吊机缆绳系统可能发生共振,导致张力极值出现。
图10说明了扶正时海流对于张力腿应力的影响。降低海流流速,可以改善张力腿最大应力;一年一遇孤立流作业工况较一年一遇流作业工况,更为危险。考虑孤立流的影响,适合现场扶正的作业窗口为有效波高在2.0 m以下、0°-15°和165°-180°浪向。

图5 张力腿最大应力Fig. 5 Tendon maximum mises stress

图6 主安装船吊机缆绳最大张力Fig. 6 Maximum crane tension of MIV

图7 辅安装船吊机缆绳最大张力Fig. 7 Maximum crane tension of SIV

图8 张力腿不同分析步骤的最大张力Fig. 8 Tendon maximum mises stress for each step
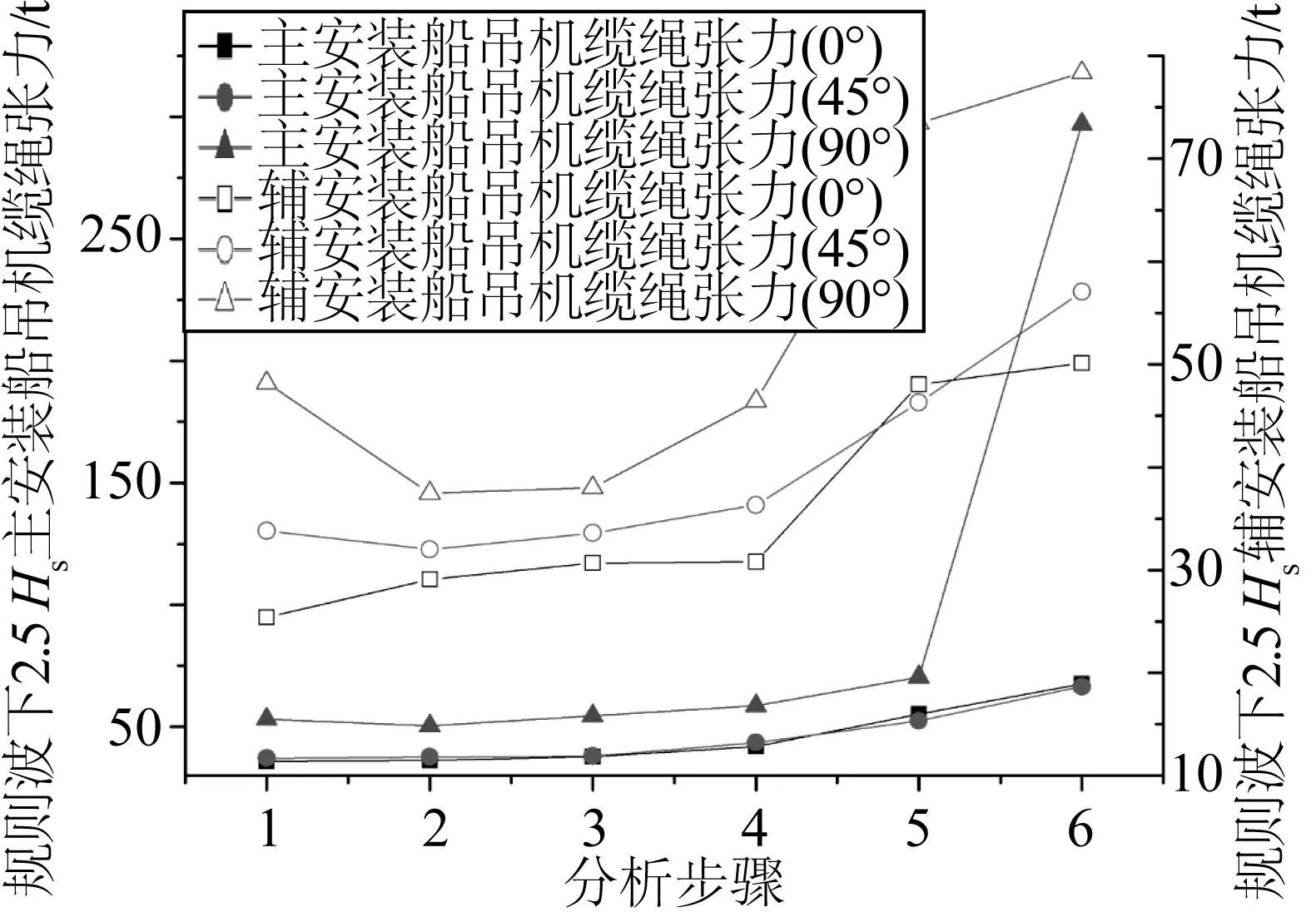
图9 主辅安装船不同分析步骤的吊机缆绳最大张力Fig. 9 Maximum crane tension of MIV/SIV for each step

图10 不同海流工况下张力腿最大应力Fig. 10 Tendon maximum mises stress under different current conditions

图11 不同吊机缆绳释放速度下张力腿最大应力Fig. 11 Tendon maximum mises stress under different payout rates of crane wire
3.2吊机缆绳释放速度敏感性分析
基于一年一遇流,进行吊机缆绳释放速度敏感性分析,结果如图11~13所示。张力腿最大应力、主辅安装船吊机缆绳最大张力对吊机缆绳释放速度的变化不敏感。当释放速度增大时,张力腿最大应力略有增大,辅安装船吊机缆绳最大张力略有减少,主安装船吊机缆绳最大张力几乎不变。
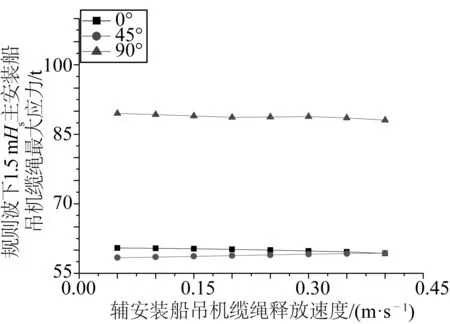
图12 不同吊机缆绳释放速度下主安装船吊机缆绳最大张力Fig. 12 Maximum crane tension of MIV under different payout rates of crane wire

图13 不同吊机缆绳释放速度下辅安装船吊机缆绳最大张力Fig. 13 Maximum crane tension of SIV under different payout rates of crane wire
3.3集束扶正分析
由于张力腿是单根拖航安装,当张力腿数量较多时,工期会比较长,满足操作要求的海洋环境条件作业窗口难以控制。为此提出“集束水平湿拖+现场扶正”的安装方式[5,14]。这里将两根张力腿连接为一组,以实现一侧立柱位置所有张力腿一次性扶正安装。每组张力腿之间用两个横撑固定,保证张力腿截面中心距离与立柱上张力腿接口中心距离及海底张力腿基础中心距离相等。在张力腿底部附近设置一个横撑,在张力腿顶部附近设置另外一个。
图14和图15,为一年一遇流下集束扶正分析结果。根据不规则波计算结果,适合现场扶正的作业窗口为2.5 mHs以下、0°-30°和150°-180°浪向。考虑所有环境方向工况,顶部支撑所承受的最大拉力和压力分别为53.2 t和-22.8 t,底部支撑所承受的最大拉力和压力分别为3.9 t和-22.2 t。

图14 集束扶正时张力腿最大应力Fig. 14 Tendon maximum mises stress during the assembly upending

图15 集束扶正时支撑最大和最小拉力Fig. 15 Maximum and minimum tensions of the supports during the assembly upending
4 结 语
1)数值模拟了TLP平台张力腿水平湿拖之后的现场扶正过程。对于单根张力腿来说,依据张力和应力接受标准,确定现场扶正作业的限制海况:2.0 m有效波高、0°-15°和165°-180°浪向;对于集束扶正方式,也可纳入前期安装方案中考虑,其中支撑需要特别设计。
2)在扶正时,浪向/流向、波高、流速对张力腿应力影响显著。张力腿最大应力随着波高、流速的增大而增大。在45°-135°浪向/流向时,张力腿最大应力急剧增大。浪向/流向、流速对主辅安装船吊机缆绳最大张力影响比较显著。扶正开始时张力腿易出现应力极值,关于这一点,在现场施工中应特别注意。
3)在扶正时,张力腿最大应力、主辅安装船吊机缆绳最大张力对吊机缆绳释放速度的变化不敏感,但不建议释放速度过慢。
4)在扶正计算中,船舶位置控制是十分重要的,建议在实际施工方案执行之前,进行合理深入的数值模拟,以确定合理的船舶位置和吊机缆绳释放长度。
[1] WILHOIT L, SUPAN C. 2010 worldwide survey of TLPs, TLWPs[J]. Offshore, 2010, 70(2): 49.
[2] D'SOUZA R, AGGARWAL R, BASU S. The tension leg platform-a retrospective[C]//Proceedings of the 18th SNAME Offshore Symposium. 2013.
[3] MUNKEJORD T. The heidrun TLP and concept development for deep water[C]//Proceedings of the Sixth International Offshore and Polar Engineering Conference. 1996.
[4] ISHIKAWA K, MORIKAWA M, KODAN N, et al. Towing and upending procedure of pre-fabricated tendon of TLP[C]// Proceedings of the Second International Offshore and Polar Engineering Conference. 1992.
[5] GALGOUL N S. Alternative procedure for the assembly and installation of TLP tendons[J]. Offshore Engineering, 1997, 29: 167-173.
[6] LI G G, KIPP R, LEVERETTE S. Horizontal Installation of TLP Tendons[C]// Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers, 2012: 1-8.
[7] 苗春生,高原,宋春娜,等.TLP张力腿水平湿拖的疲劳分析[J].中国海上油气, 2017, 29(4):152-158. (MIAO Chunsheng, GAO Yuan, SONG Chunnan, et al. Analysison the fatigue of TLP tendons duringwet-towinstallation[J]. China offshre Oil and Gas, 2017, 29(4):152-158. (in Chinese))
[8] BIAN X S, LEVERETTE S J, RIJKEN O R. A TLP solution for 8 000 ft water depth[C]// Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers, 2010: 255-262.
[9] WU S, KARAYAKA M, D'SOUZA R. Global performance comparison between composite and steel tendons in ultra deepwater TLPs[C]// Proceedings of the Offshore Technology Conference. 1999.
[10] Orcina. OrcaFlex manual, version 9.8a[S]. 2009.
[11] 孙锟, 李雪松, 陈晓东, 等. 基于 OrcaFlex 软件的柔性管缆正常铺设计算分析[J]. 海洋工程装备与技术, 2016, 3(2): 129-134.(SUN Kun, LI Xuesong, CHEN Xiaodong, et al. Normal laying analysis of flexible line using OrcaFlex[J]. Ocean Engineering Equipment and Technology, 2016, 3(2):129-134.(in Chinese))
[12] API RP 2T, Recommended practice for planning, designing and constructing tension leg platforms, 3rd edition[S]. 2010.
[13] DNV OS C105, Structural design of TLPs (LRFD Method) [S]. 2014.
[14] SEGUIN B, GOODLAD M. A fresh look at pipeline and riser bundles: combined experience and practice[C]// Proceedings of the Offshore Technology Conference. 2014.
Numerical simulation of TLP tendon upending operation based on horizontal wet-tow installation method
MIAO Chunsheng, SUN Kun, YE Yongbiao, SHI Jinkun, CHEN Xiaodong
(COOEC Subsea Technology Co., Ltd., Shenzhen 518067, China)
There are two installation methods for TLP tendon: vertical installation method and horizontal installation method. Taking a TLP tendon as an example, an upending analysis model is built using OrcaFlex based on horizontal wet tow installation method, and then the upending process is simulated. The dynamic response of the tendon is analyzed with different parameters such as environmental condition, crane wire payout rate and so on, and the upending analysis for the tendon assembly is also performed. The feasible weather window for the upending operation is decided according to the installation acceptance criteria. The results of simulation analysis show that: during the upending operation, wave and current direction, wave height, and current speed have big effect on tendon stress; the tension of crane wire is sensitive to wave and current direction and current speed; the payout rate of crane wire has little effect on tendon stress and the tension of crane wire.
tendon installation; horizontal installation method; upending analysis; OrcaFlex simulation; tension leg platform
1005-9865(2017)06-0037-08
P751; TE54
A
10.16483/j.issn.1005-9865.2017.06.005
2016-12-04
苗春生(1972-),男,高级工程师,从事海洋工程安装与技术管理工作。E-mail:miaocs@mail.cooec.com.cn
孙 锟(1990-),男,助理工程师,从事船舶与海洋工程方面研究工作。E-mail:sunkun@mail.cooec.com.cn