自返式微型地热探针水下运动及贯入特性分析
2017-12-11徐向上冯志涛张选明贾立双
徐向上,冯志涛,张选明,贾立双,李 墨
(国家海洋技术中心,天津 300112)
自返式微型地热探针水下运动及贯入特性分析
徐向上,冯志涛,张选明,贾立双,李 墨
(国家海洋技术中心,天津 300112)
自返式微型地热探针水下运动特性以及其贯入深度关系到其能否正常入泥工作,针对自返式微型地热探针的结构,对其进行简化,建立物理模型。并针对海洋流场及海洋底质,抽取关键参数,建立探针投放过程中的流场模型和底质模型。将所建立模型导入数据分析软件,先分析探针在投放过程中竖直方向和水平方向的相关运动特性,然后拟合为探针下行过程中下行深度和横向漂移的轨迹图,可见其水平方向最大位移约为106 m。在理论上论证了探针在下行过程中的姿态稳定性。通过计算论证了自返式微型探针在依靠自身重力的情况下,自动贯入海底沉积物进行热流测量工作方式的可行性。并在最后通过海上试验,对分析结果进行了实践验证。
自返式;地热探针;海底热流;运动特性;贯入特性
海底热流是进行地质构造研究、石油资源的成熟度研究及物理环境的评价,特别是新型能源——天然气水化合物调查等不可缺少的重要基础资料[1]。而地热探针是进行海底热流探测的专用设备,它依靠自重将集成有感温元件和电加热丝的探针贯入海底沉积物中,进行温度梯度和沉积物热导率的原位测量,从而间接实现海底热流的测量[2-3]。在自然科学基金的支持下,研制了一种自返式微型地热探针,它采用微型化、自返式设计,小巧轻便,可进行机载和舰载的投弃式布放。经合理设计重心、浮心布局,探针投放入水后,可自动调整姿态直至达到稳定垂直,并保持垂直姿态向下运动,以足够的速度贯入海底沉积物中。探针顺利贯入沉积物是实现热流探测的前提,对探针入水后的运动特性进行了仿真,并对其水下的运动姿态进行了校核,分析其投放过程中各阶段的运动参数,论证了其自动贯入沉积物进行热流探测的可行性。
1 探针物理模型及环境简化模型
1.1探针结构关键技术参数
自返式探针结构主要包括返回舱、释放机构、数据采集舱、配重块、测温针和探杆等部分。探针结构如图1所示。
本文设计的自返式探针总质量为32 kg,体积为0.004 8m3,返回舱为圆柱型舱体,外径120 mm,高640 mm,采用超硬铝材料制成,以最大限度降低自重。返回舱顶端安装圆柱形天线,采用POM材料;自动释放机构高度为27.5 mm,不锈钢材料制成;数据采集舱为圆柱型舱体,外径120 mm,高度170 mm;配重块为圆锥体设计,内部灌铅,增加自重同时使得探针整体重心下移。下端倒角,其目的是降低水阻;测温针为外径6 mm,管内充入硅油;探杆为直径30 mm、长度625 mm、壁厚4 mm的不锈钢管,管内充入铅;支架上有2个卡扣,作为测温针固定之用。

图1 探针结构Fig. 1 The structure of the probe
1.2建立探针物理模型
探针结构复杂,对探针进行运动特性分析之前,有必要对其关键结构参数进行抽取,并建立简化的物理模型。由于本文探针顶端天线、释放机构、测量针、卡扣等结构对于计算结果影响较小,因此对上述细节部分进行了合理的简化。探针物理模型的舱体为两段式设计,模型其内部为实心,密度均匀材质,进行模型简化后,利用式(1)提取舱体的平均密度。
式中:M舱体为舱体总质量,V为舱体体积。经过计算可知返回舱模型平均密度为2.97 g/cm3,数据采集舱模型平均密度为4.125 g/cm3。探针的物理模型外径为120 mm,对探针部分进行关键参数提取,可忽略测温针的影响,将测温针与探杆部分合并,简化模型为外径30 mm的圆柱,前端设计为尖端。经计算其总体平均密度为经计算为6.8 g/cm3。对探针的关键结构参数进行合理简化,从而抽取得到其物理简化模型如图2所示。
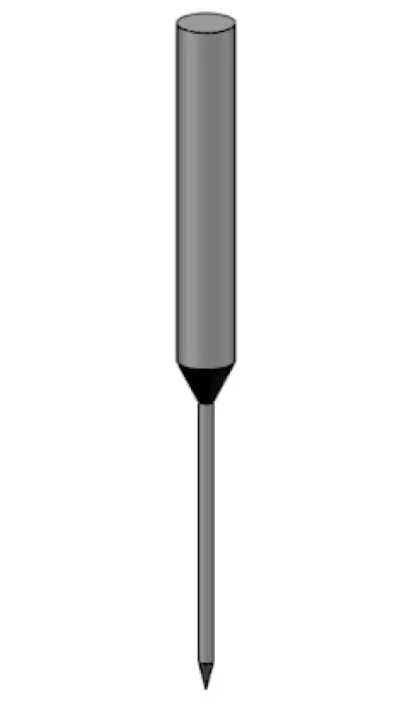
图2 抽取关键参数后的探针简化物理模型Fig. 2 The simplified physical model of the probe after extracting the key parameters
1.3环境参数分析及其简化模型
探针在下行过程中,同时受海流和海浪的影响,因此,建立海洋流场模型十分必要。具体海洋流场参数如表1所示。本文的分析过程是针对表1所示的海洋流场,探针在投放后,在海水中下落,因此不同海况对探针运动特性的影响并不大。

表1 海洋流场参数Tab. 1 Ocean flow field parameters
为便于仿真计算,本文设定海洋流场环境为理想环境,同水深流速一致。探针下落至海底,设定海底沉积物底质为塑性沉积物,探杆侧壁受到海底沉积物的摩擦力。针对不同沉积物的密度和类型, 根据经验[4-5],将沉积物底质简化模型选取4种沉积物底质简化模型:Fy=0.6 t/m2、Fy=0.7 t/m2、Fy=0.8 t/m2、Fy=0.9 t/m2,Fy即探杆侧壁单位摩擦力。对四种不同的沉积物底质分别展开探针的入泥深度分析。
2 探针下行过程运动特性分析
2.1探针下行过程受力分析
探针在布放时,是在船上由吊臂以吊放的方式释放,探针自由落体投入海水中,在探针下落的过程中,竖直方向上受到重力、自身浮力、海水阻力,水平方向上受到波浪力和海流力的作用,由此可以建立探针在水中下落过程的运动方程:

2.2计算水平方向波流力计算
探针下落过程中,作用在探针单位长度上的水动力包括波浪力和海流力,采用莫里森公式[6]进行计算,如公式(4)所示。

探针在海水中,波浪引起水质点作轨圆运动,根据线性波理论,对深水情况,不同水深处由波浪引起的水质点水平分速度为:

海流引起的水质点水平分速度为:

将式(5)、(6)、(7)代入式(4),可得到探针单位长度上的波流力。
2.3探针加速阶段周围流场分布分析
将2.2节简化后的探针三维模型导入网格划分软件,选择大于模型5倍的区域作为流体仿真区域,并进行合理的网格离散。探针计算网格划分见图3。根据探针的使用环境和下落时的实际情况合理选择流体仿真的边界条件,再导入计算流体力学软件,进行探针运动流场模拟。
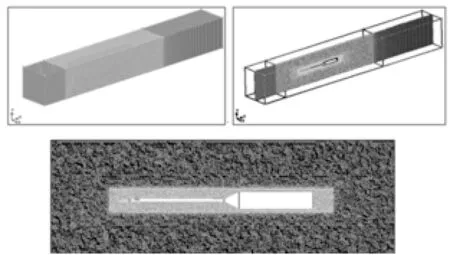
图3 探针网格划分图Fig. 3 The mesh of the probe
在探针投放后,选取2 m/s、6 m/s、8 m/s作为典型值进行计算,分析不同速度下探针周围的流场分布变化规律。图4为经过仿真计算得到的流场分布图。由图可见,在不同下行速度下,探针周围流场分布基本类似,只是伴随速度增大,在探针外轮廓的拐角处形成的涡流速度亦会随之增大。但是,探针周围流场分布基本对称,未发现流场分离的现象,由此可以推断现有探针的外形设计是符合流体力学原理的,可有效避免下行过程中的抖动。流场在探针的尖端基本未发现有大幅的流速降低,在探针和配重进行过渡的拐角处,压力值变小,而在配重和仪器舱的拐角处,则出现了流体压力的剧增,当流体流经末端时,产生了一个低压区,为改善这一状况,尾端需进一步完善设计,加入导流装置。

图4 不同速度探针速度云图Fig. 4 The speed of the probe at different speeds
2.4下行阻力计算
探针投放后,在自身重力的作用下进入海水中,此时由于受到自身重力和浮力的作用,竖直方向的速度不断增长。同时,探针在水中运动也受到海水的阻力,其所受阻力分为形状阻力和摩擦阻力,形状阻力与探针外形和导流结构有关,摩擦阻力系数则取决于雷诺数和探针表面积,且其总的阻力大小与其竖直方向速度成正相关关系[7]。
探针在海水中下落阻力计算公式:
式中:Cd为阻力系数;S为探针迎流面面积;v为探针运动速度。

图5 下行阻力随探针运动速度变化曲线Fig. 5 The descending resistance varies with the velocity of the probe
自返式探针投放阶段,是由绞车吊放至海面利用释放钩进行投放的,因此,其入水初速度可视为0。在此前提下,对不同速度的探针的阻力系数和下行阻力进行计算,以探针下落速度为2 m/s时为例,其水阻系数约为0.41,此时探针所受向上的水阻力约为6.88 N。对计算的多个点进行拟合,即可获得探针下行速度与下行阻力关系曲线,如图5所示。
2.5下行过程运动过程仿真

1) 入水深度为0~47.5 m之间,探针竖直方向速度不断增大。在47.5 m时,探针竖直方向上自身重力(Mg)等于自身浮力(Fρ)与下行阻力(Fd(t))之和,竖直方向达到受力平衡状态,速度达到极限值,大小为10.88 m/s,其速度与深度变化曲线如图7所示。探针的速度—下落距离曲线的斜率是逐步增大直至恒定为无穷大的过程,亦即在此过程其加速度是逐步减小直至为0的。
2) 入水深度47.5~2 000 m之间,竖直方向速度保持匀速,大小为10.88 m/s。仿真得到探针竖直方向上位移随时间的变化的曲线,如图8所示,可见在此阶段,下落距离—速度之间斜率恒定,说明竖直方向为匀速状态。在水深2 000米的环境中,从投放入水直至触底阶段,整个下行过程约需要184.7 s。
依据式(4),使用MATLAB计算出探针水平方向速度与位移关系曲线,由计算结果图9、图10可知入水深度0~150 m时,水平方向速度变化剧烈,150~2 000 m时,水平方向速度变化相对平缓。由此可知,探针入水150 m后,波浪对于探针的影响极其微弱,所以海况对于探针的运动特性影响并不大。图11为水平漂移随时间变化的曲线图,图12为探针下行过程中下行深度和横向漂移表示的轨迹图,可见其水平方向最大位移约为106 m。由于探针没有集成水下定位装置,水平方向最大位移的确定可有效确定地热探针的可能探测范围,而在地热探测中106米的定位误差在可接受范围内,因此,探针进行投弃式热流调查获取的数据是有效且具有代表性的。

图6 探针竖直方向速度曲线Fig. 6 The vertical velocity curve of the probe

图7 前50 m探针竖直方向速度变化Fig. 7 Probe in the first 50 meters of the vertical direction of the speed change map

图8 探针竖直方向位移随时间变化Fig. 8 The vertical displacement of the probe changes with time
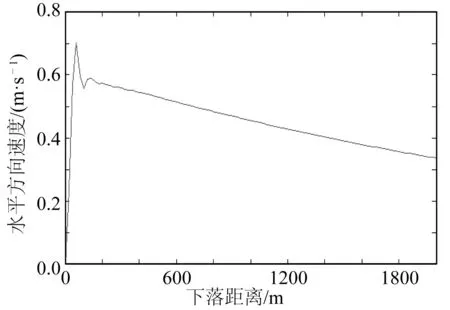
图9 探针水平方向速度变化Fig. 9 The change of the horizontal velocity of the probe
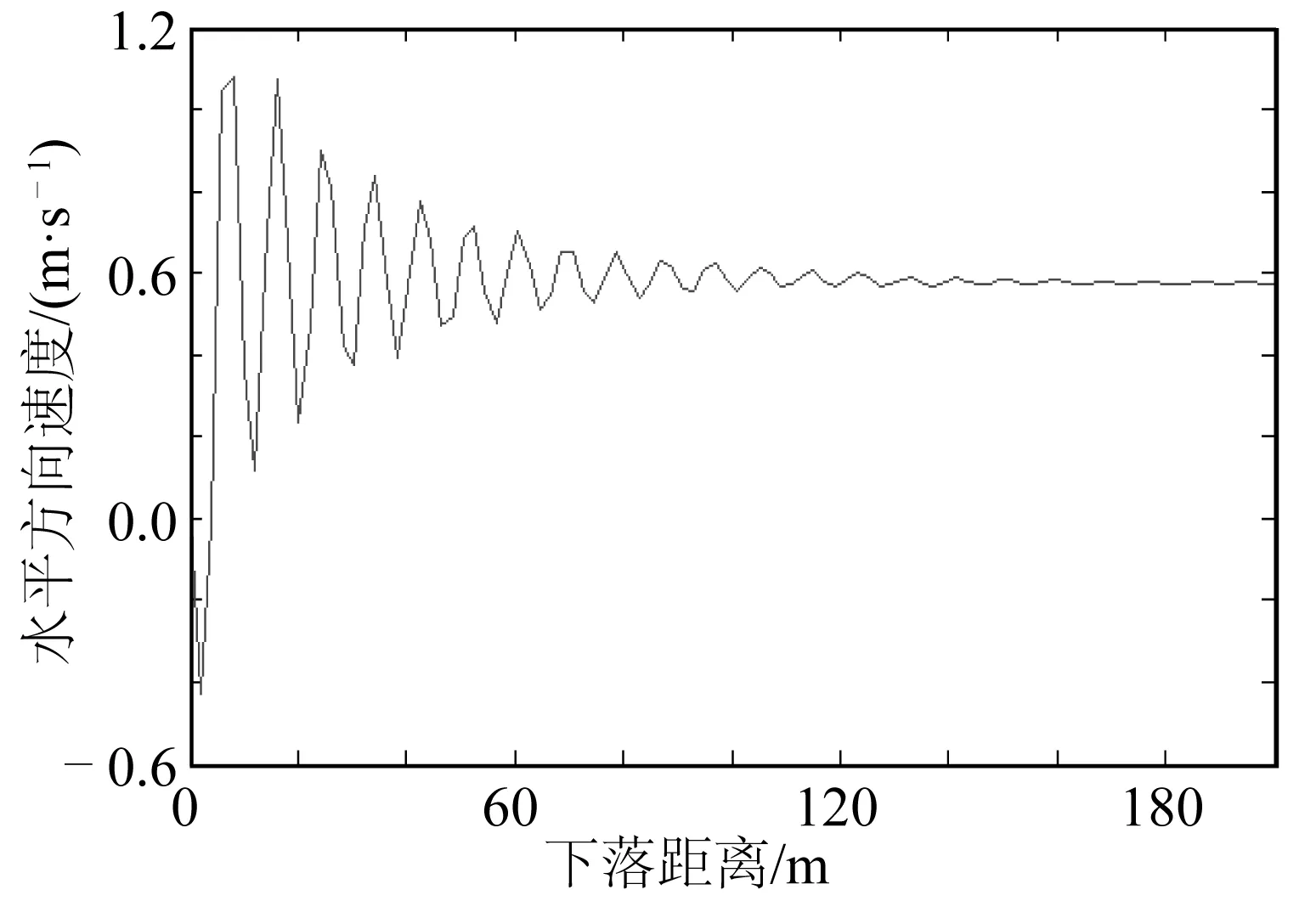
图10 前200 m探针水平方向速度变化Fig. 10 The probe changes in the horizontal direction of the first 200 meters

图11 探针水平方向位移随时间变化Fig. 11 The horizontal displacement of the probe changes with time

图12 探针下落轨迹Fig. 12 The falling path of the probe
2.6探针下行过程中的稳定性校核
探针在下行过程中,竖直方向上和水平方向上均受力,其稳定性受力分析如图13所示。

图13 探针姿态稳定性受力分析Fig. 13 Analysis of attitude stability of probe
探针重心和浮心的位置按以下公式求出。

稳心高:
为了使探针能够保持针头向下的姿态,则必须有hgt;0,即重心位置应低于浮心位置。然而,根据探针受力示意图可知,在浅海区域会受到海流给予的水平方向上的力FL,产生了使探针发生倾斜的力矩。
探针在下行过程中,受到波流力的干扰,姿态会发生变化。首先,当探针在波流力FL作用下发生倾斜时,重心和浮心之间将有一个水平距离,由于重心在下,且探针重力Ggt;浮力Fc,因此会产生一个促使探针恢复其原始位置的恢复力矩,从而使探针保持竖直姿态。
3 探针贯入特性分析
探针下落至海底后,会插入海地沉积物中,对于探针的入泥深度,利用能量守恒定律进行计算
式中:Ek为探针动能;EP为探针势能;W为沉积物阻力做功。
沉积物阻力包括桩端阻力及侧壁摩阻力。桩端承载力取150 kPa,而侧摩阻力随入泥深度变化,因此沉积物阻尼做功为
式中:A为桩端面积,m2;f(z)为沉积物侧摩阻力,N。
探针入泥过程分为两个阶段,首先是测温针和支架入泥,桩端面积为测温针截面积A1和支架截面积A2之和,然后探针配重部分入泥,其截面积为A3。其中测温针截面积A1和支架截面积A2之和为0.000 76 m2,探针配重部分截面积A3为0.011 m2。第一阶段入泥深度为0.62 m,第二阶段入泥深度为h2,探针入泥总深度为(h2+0.62)m,在此基础上,将式(10)、式(11)代入MATLAB计算,可以得到入泥深度随时间变化和入泥速度随时间变化的情况。
以海底沉积物模型Fy=0.6 t/m2为例,计算可得入泥深度随时间变化和入泥速度随时间变化情况如图14、图15所示。探针在入泥深度0~0.62 m时(即入泥第一阶段),速度变化很小,用时约为0.072 s;探针在入泥深度为0.62~0.94 m时(即入泥第二阶段),探针配重部分开始入泥,速度减小明显。可以看出,探针最大入泥深度为0.94 m,入泥深度满足探针正常测温与返回舱释放的需求,因此,探针入泥成功。经计算可知,侧壁摩阻力参数分别为Fy=0.6 t/m2、Fy=0.7 t/m2、Fy=0.8 t/m2、Fy=0.9 t/m2时,探针均能完全入泥。

图14 探针入泥速度随时间变化图Fig. 14 The velocity of the probe changes with time
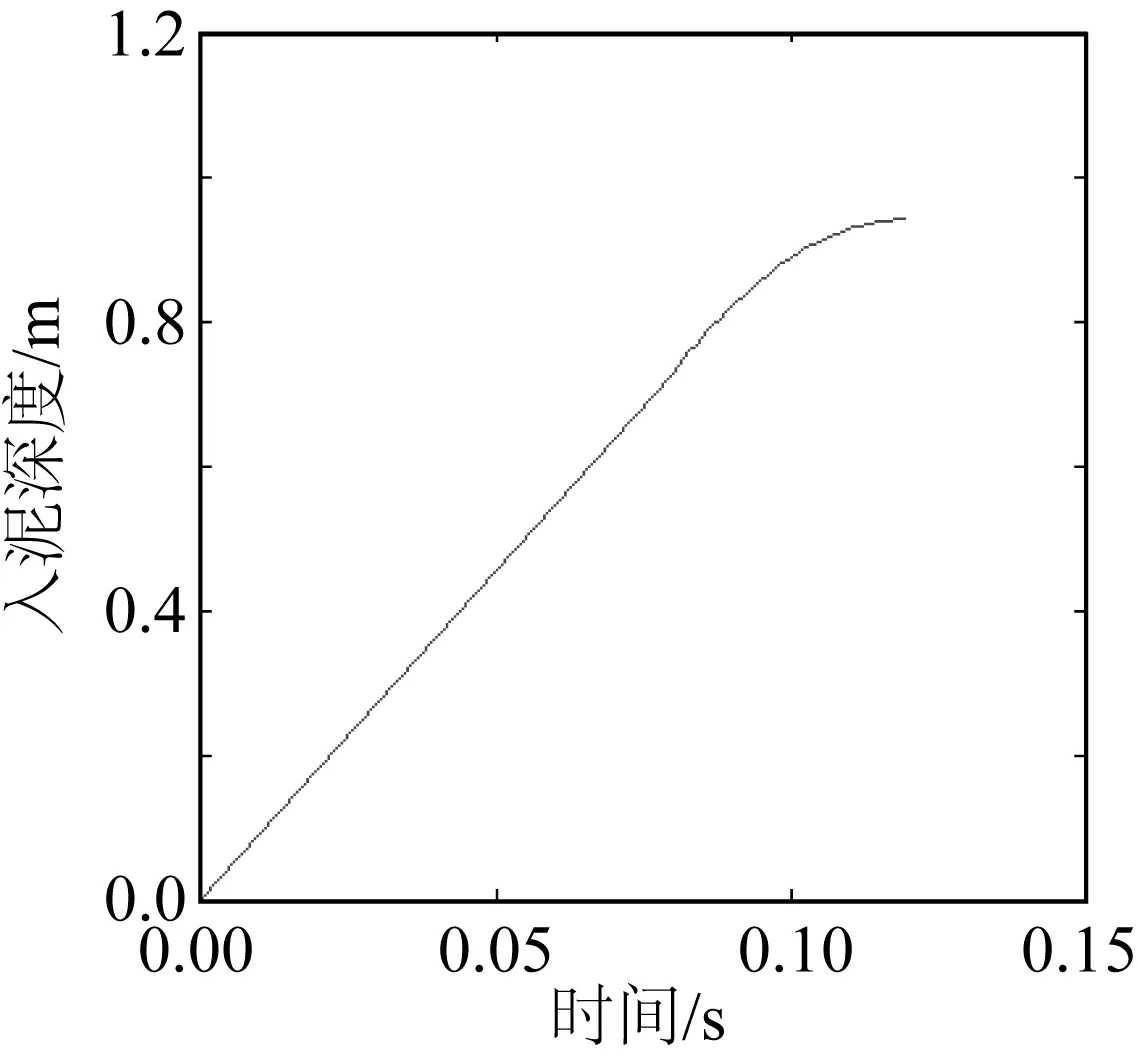
图15 探针入泥深度随时间变化图Fig. 15 The depth of the probe into the mud with time
4 自返式微型地热探针海上贯入试验
自返式微型地热探针在2016年12月进行了海上试验,经过3次试验,相关实验记录如表2所示。探针在实际使用时,探针在数据采集完成后,通过预先设定的程序通电熔断电解丝,电解丝熔断后,返回舱在自身浮力的作用下浮至海面,返回舱内部带有定位装置,回收人员据此将其找到后回收。但在海试阶段,为了节省成本,将探针数据采集部分(探杆、配重、数据采集舱等)用绳子系住,在试验完成后,将其从海底拔出。预先在探杆侧壁等间距加工凹槽,间距5 cm,通过观察凹槽中的沉积物残留,可推测探针的入泥深度。

图16 探针海试组图Fig. 16 A set of photographs of the probe′s ocean experiment
同时,探针内部电路集成了倾角传感器和加速度传感器,用于在试验过程中完成探针的触底监控和倾角采集。下行过程中,加速度传感器一旦感应到探针触底,经过一定延时待探针姿态稳定后,连续采集3次系统的倾角数据并进行平均得到其倾角值。试验结果证明,微型地热探针在海上工作稳定可靠,可顺利贯入沉积物中,且贯入深度适中,探针倾角在有效范围内。

表2 探针海上贯入试验记录Tab. 2 Seawater penetration test record of the probe
5 结 语
将针对自返式微型探针进行了结构简化,建立探针物理模型,并搭建典型海洋流场和海底沉积物物理模型,进行了软件仿真分析,完成其下行阶段和贯入沉积物阶段受力分析,并根据结果分析了各个阶段谈针的运动特性。此后进行了稳定性校核和贯入深度的探讨,验证了自返式微型探针自动投放自动返回这一工作方式是可行的。
[1] 罗玉玺, 唐友刚. 深海沉积物地热探针贯人沉积物深度的探讨[J].海洋技术, 2009, 28(1): 120-125.(LUO Yuxi, TANG Yougang. Discussion on plugging depth into sediment of the deep sea sediment geothermal probe[J]. Ocean Technology, 2009, 28(1): 120-125. (in Chinese))
[2] 冯志涛, 贾立娟. 自返式微型海底沉积物地热探针设计[J].海洋技术, 2016, 35(6):67-68.(FENG Zhitao, JIA Lijuan. The design of miniature boomerang seafloor sediment heat-flow probe[J]. Journal of Ocean Technology, 2016, 35(6):67-68.(in Chinese))
[3] 孙涛, 黄银水, 陶建华. 抛弃式温盐探头运动状态的数值模拟及其实验验证[J]. 海洋通报, 2002, 21(2): 69-76.(SUN Tao, HUANG Yinshui, TAO Jianhua. Numerical modeling for the kinetic property of a dropping seawater temperature-salinity probe and experimental verification[J]. Marine Science Bulletin, 2002, 21(2): 69-76.(in Chinese))
[4] 杜星,孙永福. 重力活塞取样器贯入深度研究[J]. 海洋工程, 2016, 34(3):133-139. (DU Xing,SUN Yongfu. Study on penetration depth of gravity piston corer[J]. The Ocean Engineering, 2016, 34(3):133-139. (in Chinese))
[5] SMITH G N,SMITH I.Elements of soil mechanics[M].8th ed.,Edinburgh: Wiley-Blackwell Publishing,1998.
[6] 陈文义, 张瑞. 抛弃式海流剖面仪探头流场数值模拟[J]. 科技导报, 2010, 28(20):62-65.(CHEN Wenyi, ZHANG Rui. Numerical simulation the flow field of expendable current profiler probe[J]. Science amp; Technology Review, 2010, 28(20):62-65. (in Chinese))
[7] 黄银水, 陶建华.线圈释放式温、盐、深探头运动特性的数值计算方法研究[J]. 海洋技术, 2003, 22(1):45-48.(HUANG Yinshui, TAO Jianhua. Computation method of the kinetic property of salinity, temperature and depth probe with releasing winding[J]. Ocean Technology, 2003, 22(1): 45-48. (in Chinese))
Analysis of underwater motion characteristics and penetration characteristics of mini heat flow probe
XU Xiangshang, FENG Zhitao, ZHANG Xuanming, JIA Lishuang, LI Mo
(National Ocean Technology Centre, Tianjin 300112, China)
The underwater movement characteristics and depth of penetration of mini heat flow probe are related to its normal work into the mud. The structure of the mini heat flow probe is simplified and the physical model is established. And for the ocean flow and marine sediment, the key parameters are extracted, and the model of the probe flow process and the sediment is established. Data analysis software is introduced, and the relevant motion characteristics of the probe in the vertical and horizontal directions during the process are analyzed. Then, the trajectory of the downstream depth and the lateral drift in the downstream of the probe is fitted, and the maximum displacement in the horizontal direction is found to be about 106 m.In this paper, the attitude stability of the probe in the downstream process is proved theoretically. It is proved that the self-starting miniature probe can automatically penetrate the seabed sediments to study the working mode of heat flow measurement in the case of its own gravity. And finally through the sea test, the results of the analysis are rerified.
self-starting; heat flow probe; submarine heat flow; movement characteristics; pemetration characteristic
1005-9865(2017)06-0134-09
P736.2
A
10.16483/j.issn.1005-9865.2017.06.016
2017-04-19
国家自然科学基金资助项目(41306093);海洋公益性行业科研专项资助项目(201405006-2)
徐向上(1994-),男,安徽淮北人,硕士研究生,主要研究方向为海洋环境监测平台结构设计。E-mail:18222501712@163.com
冯志涛。E-mail: arzhi2008@163.com