基于UIO的汽车主动悬架系统状态估计
2017-12-11包黎明钟孝伟王乾乾
包黎明,钟孝伟,王乾乾
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121000)
基于UIO的汽车主动悬架系统状态估计
包黎明,钟孝伟,王乾乾
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121000)
基于未知扰动输入观测器对汽车主动悬架车身垂直位移,车身垂直速度,非簧载质量垂直位移和非簧载质量垂直速度状态量进行估计,残差理论对汽车主动悬架作动器发生增益故障时的控制力补偿展开研究。分别建立两自由度1/4车辆主被动悬架模型和故障模型,通过设计未知输入扰动观测器对悬架状态进行估计,并通过故障诊断和检测,获得悬架故障输出残差。在此基础上,基于控制率重组思想,对LQG控制率实时控制力补偿,实现主动悬架作动器的容错控制,并通过Matlab/Simulink对控制效果进行验证。仿真结果表明,设计的观测器能很及时的发现故障发生时刻,而采取的控制力补偿能很快使故障悬架恢复到原来主动悬架性能水平,从而消除了作动器故障对悬架性能的影响,提高了主动悬架控制的可靠性。
主动悬架;作动器;输出残差控制;力补偿
引言
主动悬架能根据汽车的行驶条件对悬架系统的刚度和阻尼特性进行动态自适应调节,使悬架系统始终处于最佳减震状态。目前,对主动悬架控制的研究大部分是基于执行器(作动器)和传感器完好无故障时设计的,一旦传感器或作动器出现故障,之前在完好情况下设计的控制器将出现误控制,悬架系统将达不到预期的效果,影响乘坐舒适性。近年来,容错控制研究在智能控制领域受到越来越多的重视[1],它可以确保在某些部件发生故障的情况下,系统仍能按原定性能指标或性能指标略有降低(但可接受),而完全地完成控制任务。
1 建模与主动悬架LQG控制
1.1 1/4车辆模型建立
建立两自由度1/4车辆悬架动力学模型[3]如图1所示。

图1 2自由度1/4车悬架模型
根据牛顿运动定律,得到运动微分方程为[4]:

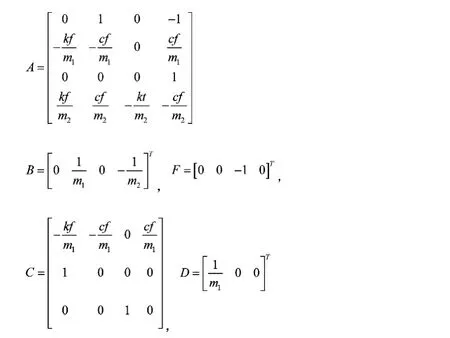
将公式(1)和(2)转换为主动悬架空间表达式:

式中:
1.2 1/4车辆悬架LQG控制率设计
对本主动悬架模型采用线性二次型最优控制,考虑到汽车行驶平顺性、操纵稳定性和降低能耗,选取车身垂直加速和控制输入u作为性能评价指标。采用状态调节器,其指标泛:

整理成标准二次型形式:

式中q1、q2、q3、q4为性能评价指标的加权系数。在Matlab中调用LQG工具箱,求出控制率,K即为所求的最优反馈控制率,改变 q1、q2、q3、q4的值,反复调试,直到出现良好的控制效果,q1=2×107,q2=2×103,q3=106,q4=4。
在Matlab中搭建车辆模型,对设计的LQG控制器进行仿真验证,由仿真结果可知,在悬架无故障时采用 LQG控制能够大大降低车身垂直加速度,但牺牲了一部分轮胎动行程。
2 主动悬架作动器故障容错控制方法
2.1 故障检测方法
发展至今的故障检测方法大致可划分为基于信号处理的方法、基于解析模型的方法、基于知识的方法三大类[5]。而基于解析模型的方法又可分为状态估计方法和参数估计方法。其中状态估计方法包括观测器方法和滤波器方法,本文采用观测器方法。由于悬架存在路面未知干扰输入的影响,为抑制其对状态观测器的影响,设计未知输入扰动的观测器(Unknown Input Observer,UIO)。因为原系统是状态完全能观测的,所以可设计全维状态观测器,其结构为[6]。

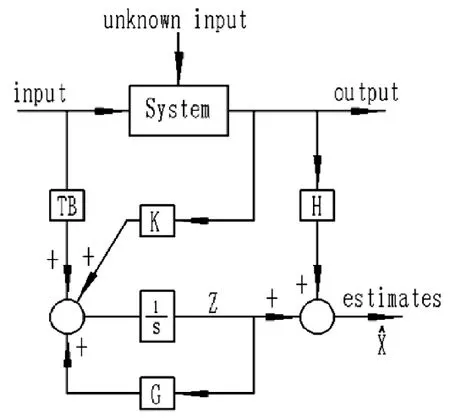
图4 未知输入观测器结构
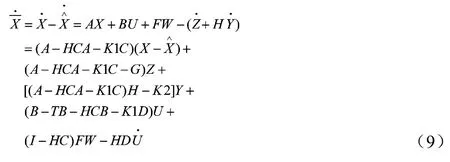
其中K=K1+K2,I为适维单位矩阵,H的一个殊解为[7]
如果(9)式满足以下条件:
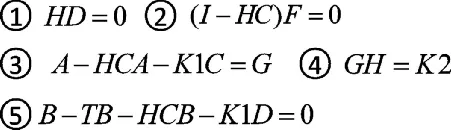
2.2 作动器故障在线诊断
当作动器发生增益故障时,根据所设计的观测器得到故障时残差:


式中 为积分变量,结合式(11)与设计的观测器可得主动悬架作动器增益估计值。

2.3 控制力补偿方法
控制力补偿是在汽车主动悬架作动器发生故障后,不需要改变原主动悬架 LQG控制器结构,只需根据前面故障检测与诊断出的信息对作动器的力进行补偿即可。
无故障时汽车主动悬架状态空间方程为:

无故障时作动器力输出为:

而发生故障增益时汽车主动悬架状态方程为[10]:

故障时作动器力输出为:

3 仿真结果分析
本文在MATLAB/Simulink中搭建1/4车辆模型,选取汽车主动悬架参数为 m1=576kg,m2=83kg,kt=350000N·m,kf=40000 N·m,cf=1360N·s/ m。利用Matlab/M文件设计故障检测模型和控制力补偿模型,选取 G=-0.001I,分别求得K,T。在悬架无故障时得到悬架动挠度、车身垂直速度、轮胎动行程、非簧载质量垂直速度的实际值与状态估计值如图6、7、8、9所示。
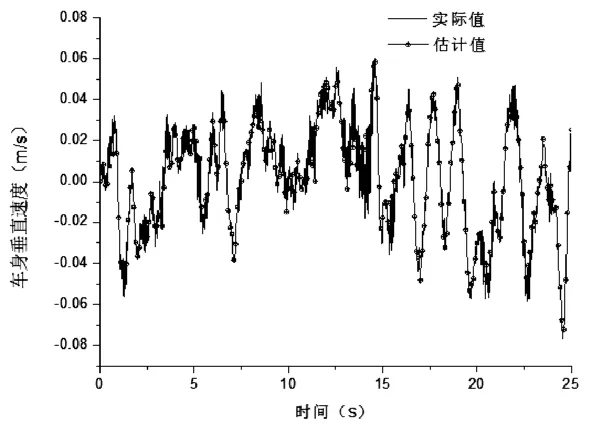
图6 车身垂直速度估计值
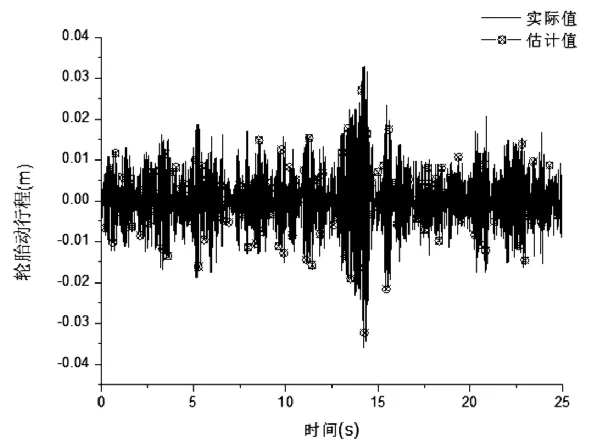
图7 轮胎动行程估计值

图8 非簧载质量垂直速度估计值
在Matlab/Simulink中人为设定10s时作动器发生0.2倍的增益故障,所得的残差信息和故障增益估计值分别如图10-15所示。
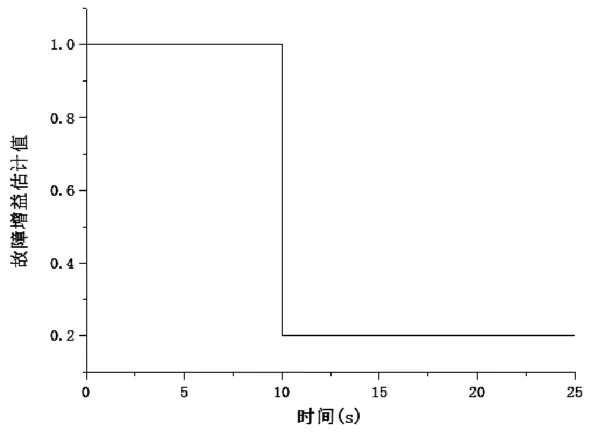
图9 作动器0.2倍故障增益估计值

图10 车身垂直加速度残差

图11 悬架动挠度残差
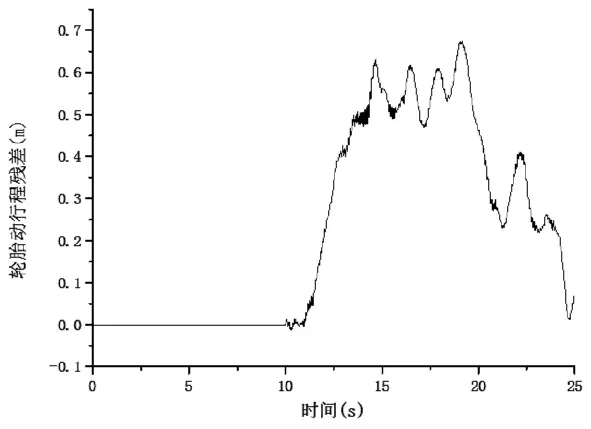
图12 轮胎动行程残差
完好无故障时悬架采用 LQG控制器与被动悬架车身垂直加速度、悬架动挠度、轮胎动行程对比分别如图所示。
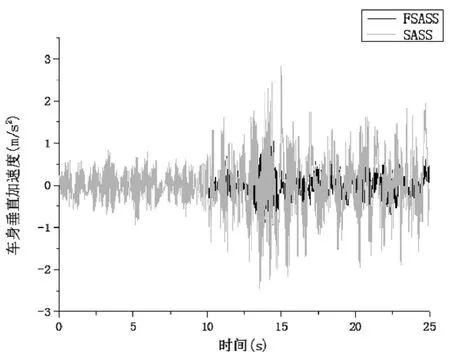
图13 容错控制车身垂直加速度对比
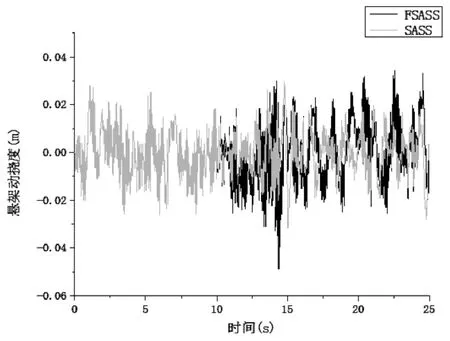
图14 容错控制悬架动挠度对比

图15 容错控制轮胎动行程对比
4 结论
采用滤波白噪声路面输入作为悬架的扰动输入与实际路面状况相接近,所设计的UIO观测器能够很好的抑制路面输入的干扰,对悬架系统的状态变量进行估计。在所设计的观测器的基础上进行系统的故障检测与诊断能够及时准确的判断出发生故障的时间与类型,为后面作动器力进行补偿提供了信息。基于主动悬架作动器故障的容错控制能够很好的提高悬架的乘坐舒适性,满足汽车更加安全、舒适的发展趋势。
[1] 沈启坤.基于自适应控制技术的故障诊断与容错控制研究[D].南京航空航天大学,2015.
[2] 闻新,张洪钺,周露. 控制系统的故障诊断与容错控制[M].北京:机械工业出版社,1998.
[3] Crolla D,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2003.
[4] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2014.
[5] 控制系统故障诊断与容错控制的分析和设计[M].国防工业出版社.
[6] Zhou Kemin,Ren Zhang,Wang Wei.On the design of unknown input observers and fault detection filters[C] // Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian,China,2006:5 638~5 642.
[7] Zhou Kemin,Ren Zhang,Wang Wei.On the design of unknown input observers and fault detection filters[C]//Proceedings of the 6th World Congress on Intelligent Control and AutomationAACC.
Vehicle active suspension system based on UIO state estimation
Bao Liming, Zhong Xiaowei, Wang Gangan
( Cars and traffic engineering of liaoning university of technology college, Liaoning Jinzhou 121000 )
Based on the idea of control law reorganization, the actuator of active suspension actuator is compensated. The 2-DOF model and the fault suspension model are established. The suspension state is estimated by designing an unknown input disturbance observer, and the fault output is obtained by fault diagnosis and detection. The fault-tolerant control of the active suspension actuator is realized by designing the fault-tolerant control of the LQG control law based on the control law reconfiguration. Matlab / Simulink simulation results show that the design of the observer can be very timely detection of the time of fault,control force compensation can quickly restore the original suspension to the original performance level, thus eliminating the actuator fault on the suspension performance Thereby improving the riding comfort of the suspension.
Active suspension; Actuator; Fault-tolerant control; Actuator force compensation Simulation verification
U463.9
A
1671-7988(2017)22-23-04
10.16638 /j.cnki.1671-7988.2017.22.008
包黎明,就读于辽宁工业大学汽车与交通工程学院。
CLC NO.:U463.9
A
1671-7988(2017)22-23-04
