核电站水下作业机械手研究及工作空间分析
2017-12-08张星星
张星星
(上海电机学院 高职学院,上海 200000)
核电站水下作业机械手研究及工作空间分析
张星星
(上海电机学院 高职学院,上海 200000)
文章通过对核电站水下作业环境分析,研制了一款用于核电站反应堆和乏燃料水池水下作业的六自由度机械手。然后分别用图解法、蒙特拉罗法、仿真法共三种方法对机械手末端执行器进行工作空间分析,针对此次机械手自由度多、正运动学正问题易求解等特点,经过对比蒙特卡洛法相对来说更快速准确地求解该机械手末端执行器的工作空间。
水下作业机械手;图解法;蒙特卡洛法;仿真法
1 引言
目前,核能及核电站在很多国家所占比例越来越高,特别是自1986年乌克兰切尔克贝利发生核泄漏事故以及2011年日本福岛核电站发生核泄漏事故之后。核电站内的关键设备多处于水下放射中,可能发生乏燃料水池裂纹、孔洞、破口等,采用机器人技术代替人工来维护和维修,既保护了维修操作人员的人身安全,又能提高作业效率,具有重要意义。其中美国和日本在核电站机器人研制方面发展最快,而我国也越来越受到研究人员的关注,普通的核电站陆地机器人很多,而针对水下作业环境,尚存在密封性能低、负载能力弱等特点。因此文章研制了一种专门用于水下核电站的机械手,其关节结构紧凑、承载能力大。
而机械手的末端工作空间对于其作业和工作能力扮演重要角色,也是设计和研究阶段必须要考虑的因素。文章对几种典型求解方法进行实际运算对比,对于以后求解此类工作空间具有重要意义。
(1)水下机械手结构方案。在核电站反应堆水池、乏燃料水池和构件池水下工作的机械手,对密封性、材料、重量等要求严格,要求既能满足水下深度要求,重量又要轻,还要防辐射。文章水下机械手总体方案设计采用的是模块化关节结构、电机驱动、关节内密封,每个关节配备有编码器,可检测转角信息。如图1所示,整个机械手采用六自由度形式,分别由腰部旋转关节、大、小臂摆动机构、臂旋转机构、腕部摆动机构和腕部旋转机构组成,分别为±160、-60~150、-140~140、±180、-120~120、±180。关节密封有动密封实现运动部件与静止部件之间的密封,静密封实现相对静止结构之间的密封,最大可实现水深20m。

图1 水下机械手总体方案设计
(2)关节传动结构。关节内部结构如图2所示采用的电机是直流力矩电机,响应速度快,输出力矩大,减速器采用谐波类型的,精度高、尺寸小、传动比大等,互相配合可使关节达到结构紧凑、输出力矩大、小型化要求。
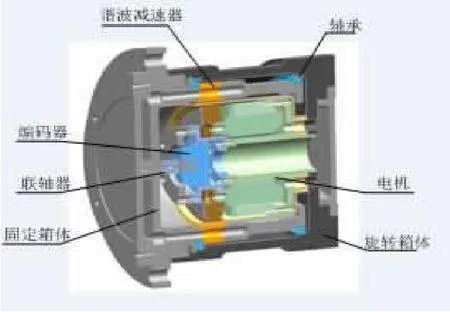
图2 关节内部结构
2 工作空间
机械手末端位置范围是由其工作空间大小决定的,求解串联机械手工作空间的方法主要有图解法、蒙特卡洛法和仿真法等。文章从各个方面进行工作空间求解,最后通过对比分析得到各种方法优缺以选择最适合此机械手的求解方法,并为后续其他机械手求解提供参考。
(1)图解法。机械手的6个转动关节,末端位置是由前三个关节确定的,所以用图解法求解机械手的工作空间,只需要取前三个关节转角即可。机械手的各个关节在其变化范围内运动过程中,末端的极限位置形成边界,边界内则构成了机械手的作业空间。通常情况下,将一个关节固定,另一个关节运动会产生圆弧,不同的很多段圆弧连接,其内部就形成了工作空间域,如图3所示。
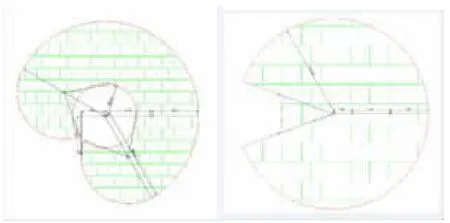
图3 机械臂在水平和竖直平面内的运动范围
(2)蒙特卡洛法。蒙特卡洛法是借助于随机抽样解决数学问题的一种数值方法,通过求解机械手运动学正问题,得到机械臂末端在参考坐标系中的位置矢量。

蒙特卡洛法是用随机函数Rand()来产生N个随机数,由此产生随机步长,从而得到关节变量的伪随机值。根据编写的程序,运用MATLAB进行仿真,可得到机械手工作空间。

图4 机械臂在xz和xy平面内的投影图
(3)仿真法。仿真法是利用Matlab/Simulink工具箱,对机械手建模如图5所示。SimMechanics模型主要由一个地模块、6个转动模块、6个刚体模块、6个驱动器模块、6个关节传感器模块和一个关节传感器模块组成,其中后5个驱动器模块封装成子系统。
具体步骤如下:①建立从手的机构简图,并分析各个关节;②根据简图在SimMechanics中建模;③为关节添加驱动器、传感器,设置关节、刚体等各个模块的参数;④进行仿真和后处理,得到数据及图形。
当仿真停止后,在Matlab主界面调用Plot3(x,y,z)可得从手的工作空间三维图(如图6),通过XY相位图直接形成x,y平面投影图(如图6).

图5 仿真模型
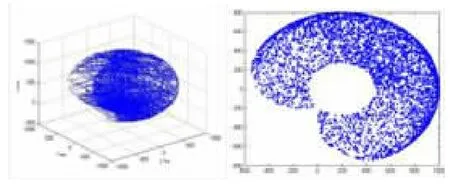
图6 机械手工作空间三维图和x,y平面投影图
5 结语
三种求解方法得到的平面图形一致,图解法主要是根据前三个连杆位置关系和长度在绘图软件上绘制,如果机械手自由度增多会造成很大负担,所以通常用在自由度较少的机械手工作空间求解上;蒙特卡罗法由从手末端位置坐标,对关节取随机变量,最后得出关节末端随机值,由于要用到正运动学求解,所以通常用于求解末端位置易求的串联机械手;仿真法需要通过对机械手建模及参数设定,仿真和调试比较复杂,若熟练后可对多个自由度的机械手求解工作空间,并且求解时只需要知道机械手的模型及相关参数,建立模型,即可求解,可广泛应用于各种复杂的机械手。
由于本次设计的机械手,共六个自由度而且求解运动学正问题比较容易,选择蒙特卡洛法求解速度比较快,所以最优,并且用该方法得到的工作空间内部点分布均匀,无空洞及空腔存在,效果很好。因此文章设计的水下核电站用机械手解决了普通机械手无法在核电站复杂环境下作业的问题,并且运用最优方法快速求解其工作空间。
[1]Dittmar M.Nuclear energy:status and future limitation[J].Energy,2012,37(1):35-40.
[2]徐文福,毛志刚.核电站机器人研究现状与发展趋势[J].机器人,2011,(6):758-767.
[3]Furuta T,Yoshida T,Nishimura T,et al.Development of the exploring robot toward future indoor surveillance missions in the Fukushima Daiichi Nuclear Power Plant[J].Nippon Robotto Gakkai-Shi,2014,32(2):92-97.
[4]刘海涛,杨乐平.空间机器人工作空间研究[J].组合机床与自动化加工技术,2011,(8).
张星星(1990-),女,硕士,助教,主要研究方向:工业机器人。
