嵌入式视频显微镜自动调焦控制系统设计*
2017-12-08许功元胡斌梁康辉民刘艳余
许功元, 胡斌梁, 康辉民, 刘艳余
(1.湖南科技大学 机电工程学院,湖南 湘潭 411201;2.湖南科技大学 机械设备健康维护湖南省重点实验室,湖南 湘潭 411201)
嵌入式视频显微镜自动调焦控制系统设计*
许功元1,2, 胡斌梁1,2, 康辉民1,2, 刘艳余1,2
(1.湖南科技大学机电工程学院,湖南湘潭411201;2.湖南科技大学机械设备健康维护湖南省重点实验室,湖南湘潭411201)
针对视频显微镜手动调焦效率低、精度差、难以得到最佳显微图像的现状,设计了一种基于嵌入式开发和Matlab数字图像处理的自动调焦控制系统。通过在显微镜调焦、变倍手轮和光照调节处添加精密传动机构,并由单片机电路控制部分实现计数脉冲的获取和电机的控制;所获序列显微图像经电荷耦合器件(CCD)镜头传至PC系统,并由Matlab图像处理软件对其进行清晰度判定,结合设计的'取均值'约束二次调焦的变步长自动搜索算法,以寻找最清晰显微图像,从而完成自动调焦。实验表明:系统可完全取代传统手动调焦操作,且精度更高,在细分驱动条件下,调焦和变倍过程的最小精度可达到1 μm。
视频显微镜; 传动机构; 单片机; 图像处理; 自动调焦
0 引 言
视频显微镜始于双目观察式体式显微镜,主要由电荷耦合器件CCD/CMOS镜头、单筒显微镜、显示器组成,是一项集光学显微镜技术、光/电转换技术、液晶屏幕技术于一体的高科技产品。因其能将显微镜获取的实物图像通过数/模转换成像在计算机上,让操作者避开传统显微镜通过口镜观察时成像小、观察不方便、图像易模糊且主观误差大等缺陷,新的视频显微镜可以方便地对图像进行观察、操作和处理,成为目前研究的热点[1]。
而现代视频显微镜的发展趋势如何利用现代计算机技术和图像处理技术自动和智能地通过计算机观察和处理显微图像,则需要解决显微镜图像获取过程的操作自动化(如载物台移动、镜头聚焦、照明光源调控和色温调整等)和图像清晰度评价自动化两大关键技术[2]。本文设计了一种可自动调焦、电控变倍和电控光照亮度调节的装置及其控制系统。
1 自动调焦控制系统方案设计
如图1,本文系统包括图像采集模块、图像处理模块和串口通信模块三大部分。其中图像采集模块接收由单筒显微镜所获、经CCD镜头传递的图像信息,并将该信息传送至图像处理模块;图像处理模块利用Matlab图像处理算法对所获序列图像进行清晰度判定,并将判定结果传递给串口通信模块;51单片机依据串口通信模块发送的指令控制3组步进电机按需转动,并通过齿轮等传动装置驱动单筒显微镜调焦、变倍和光照变化,从而获得最佳显微图像,完成自动调焦过程。为了让单片机能够准确地根据Matlab图像处理算法的判定结果控制步进电机的运行以获得最佳显微图像,本文进行了基于嵌入式开发的单片机控制电路设计和基于数字图像处理的自动聚焦算法设计,并在搭建的实验平台上进行了低、中、高倍自动聚焦实验。
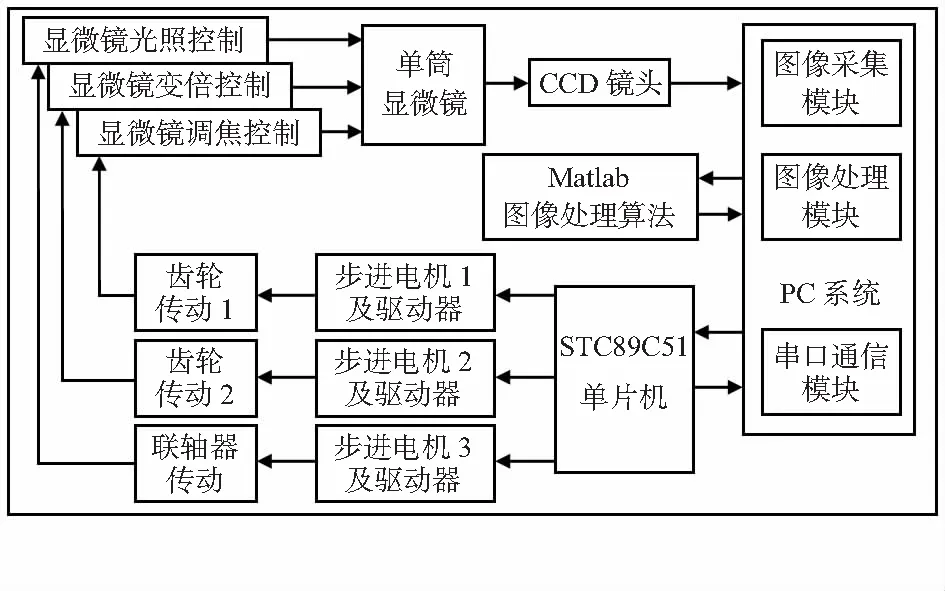
图1 视频显微镜自动调焦控制系统原理
2 嵌入式单片机控制电路设计
自动调焦控制系统由2部分组成:上层PC和下层单片机控制系统。上层PC基于Windows操作系统,主要完成显微图像采集、数据分析以及信息通信,下层下位机是以AT89C51单片机为主要核心器件的3组步进电机及其传动系统,主要完成显微镜调焦、变倍以及光照强度的调节控制。
2.1 单片机与计算机通信
计算机通过RS—232通信串口对平台控制器发出控制指令,控制器中AT89C51单片机根据接收的指令设置相应步进电机的移动方向、歩数和转速;单片机每完成一次控制操作后通过RS—232串口向计算机发送返回信号,通知计算机本次工作完毕,等待下次指令。单片机与PC的串口通信遵循RS—232协议,MAXIM232实现电平转换由[3]。
2.2 单片机与步进电机驱动接口设计
单片机通过下位机程序控制3组步进电机驱动器以驱动对应的步进电机运转,步进电机将角速度和角位移通过传动机构转换为单筒显微镜调焦、变倍方向的线速度和线位移以及光照强弱的变化,并通过计数器记录每个步进电机走过的歩数。当驱动器接收到一个脉冲信号,即驱动步进电机转动一个固定的角度(即步距角);通过控制脉冲个数可达到精确定位的目的,通过控制脉冲频率可达到精确调速的目的[4]。
AT89C51的P1口控制调焦、变倍和光照调节三组步进电机驱动器的方向和脉冲控制信号。通过改变方向控制信号“+"”,“-”调整步进电机的进/退方向;改变脉冲控制信号“+”,“-”调整步进电机前行/后退的总歩数;改变脉冲频率调整步进电机的转速;通过一个8位动态数码管和一个静态数码管记录并显示各步进电机的运转歩数。其中动态数码管前5位(记为a1~a5)用于显示调焦步进电机前行的累计歩数,其可计数范围为0~99 999;后3位(记为b1~b3)用于记录变倍步进电机前行的累计歩数,其可计数范围为0~999;调焦和变倍计步单位均以设定最小脉冲精度为标准(如,在某次调焦过程以20脉冲/步作为一个步长时,步进电机每前行/后退一步,显示器显示歩数+/-20)。静态数码管显示器(记为c1)用于记录光照强度调节步进电机前行的累计歩数,本文将光照强度分为16个等级,分别对应显示静态数码管0~9以及A,b,c,d,E,F。“0”表示最暗,“F”表示最亮。
2.3 嵌入式控制系统工作流程
图2中,本文对显微镜整体调焦行程(调焦上限位到下限位的距离)进行精确的刻度划分设计:考虑到步进电机的运转过程中可能会出现由于惯性而冲过终点的现象,在上、下限位均留有一定的余量以作缓冲;显微镜调焦总行程为62.52 mm,上、下限位处各留6.26 mm缓冲余量,即有效调焦总行程为50 mm。调焦时,以设定最小脉冲精度Aμm为调焦刻度单位,则调焦行程从1~50 000/A进行刻度编号,调焦刻度上每一个数字代表具体的调焦位置以及该处对应的图像编号,此后每次调焦过程可通过具体数字达到精确控制调焦的目的。
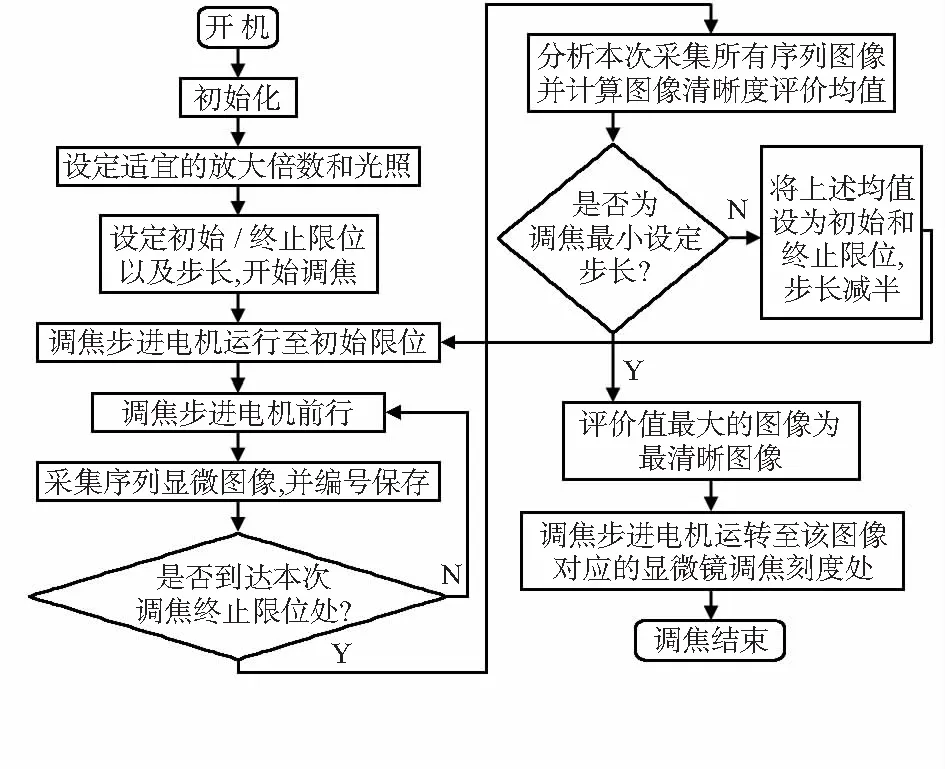
图2 系统操作流程
如某次调焦过程设定最小脉冲精度为10 μm,则调焦刻度为0,1,2,3,…,5 000,若调焦初始限位在100处,本次调焦行程为10 000 μm(即调焦刻度行程为1 000),步进电机以20脉冲/步前行。则本次调焦共50步,步进电机运行至初始限位时显示器显示100,此时采集的图像编号也为100,此后步进电机每前行一步,显示器显示数值+20,采集的图像编号+20;步进电机继续前行直至本次调焦终止限位处,此时显示器显示1 100,序列图像编号分别为100,120,140,…,1 100,共51张;则本次调焦行程图像采集完成,图像处理模块对序列图像进行数据分析和处理,单片机进入待定状态等待下次调焦指令。
3 基于Matlab图像处理的自动聚焦算法
显微镜的自动聚焦过程主要从两方面进行评价,聚焦时间和聚焦精度。聚焦时间主要依赖于自动搜索算法[5],聚焦精度主要依赖于图像清晰度评价算法[6]。
3.1 自动搜索算法
显微镜成像聚焦即为图像从模糊到清晰再到模糊的反复调节最终达到清晰的过程。其过程要求较高的精度,如果调焦步距(步长)过大,可能使显微镜越过最佳聚焦位置,导致误聚焦或不聚焦;反之,选用小步长调焦,虽然可以正确聚焦,但整个过程耗时较长,降低了系统的性能[7]。
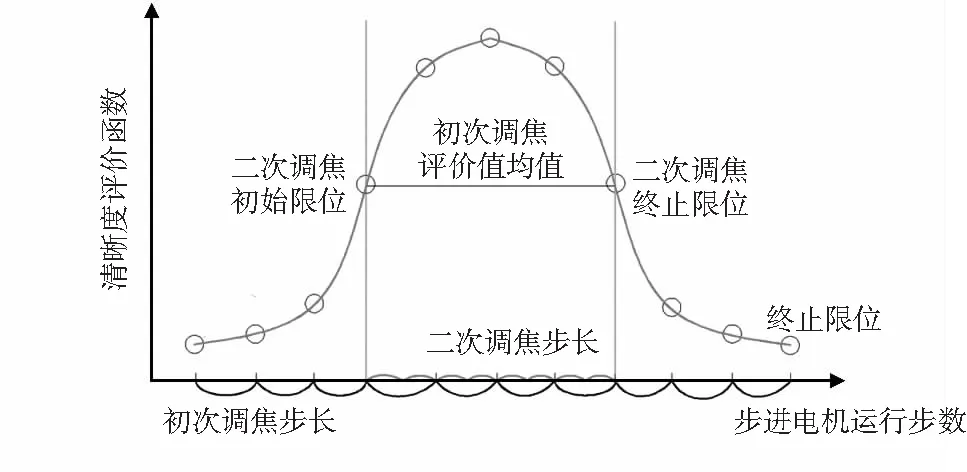
图3 自动搜索算法示意
如图3,本文采用“取均值”以约束二次调焦的变步长自动搜索算法,描述如下:
1)在设定初始和终止限位后,调焦步进电机快速运行至调焦初始限位并以大步长寻访整个调焦行程,采集序列图像并编号保存;
2)对上述序列图像进行清晰度评价,并将离散的评价值拟合成一条曲线;
3)求取所有离散评价值的平均值,并将该值对应的调焦位置作为二次调焦的初始和终止限位;
4)步长减半,重复步骤(1)~步骤(3),直到调焦步长小于等于设定值;
5)驱动步进电机运转至本次调焦清晰度评价函数最大值对应调焦刻度处,则该处为最佳调焦处,对应的图像为最佳显微图像。
采用取均值约束二次调焦的范围一方面可以防止误选局部极大值(如传统爬山法)和图像噪声的干扰(如孤立的评价值较大的点);另一方面上述获取均值以及确定二次调焦初/终限位的过程均可通过程序控制实现,节省调焦用时的同时也推进了视频显微镜自动化和智能化的进程。
3.2 图像清晰度评价算法
选用较为普遍的12种空域类算法,包括灰度绝对方差,灰度梯度向量平方,Brenner,Roberts,灰度涨落变化,拉普拉斯等清晰度评价函数[8]应用于本实验平台。在0.7倍-20脉冲/步、5 μm/脉冲精度条件下各评价函数的运行结果如图4(a)所示。经筛选,本文选用Sobel算子[9]和拉普拉斯改进算子[10]两种清晰度评价函数(如图4(b))对控制系统做低倍(0.7倍)、中倍(2.1倍)、高倍(4.5倍)自动聚焦实验。
1)Sobel算子清晰度评价函数
(1)
其中
Kx=f(x+1,y+1)+2f(x+1,y)+f(x+1,y-1)-
f(x-1,y+1)-2f(x-1,y)-f(x-1,y-1)
(2)
Ky=f(x-1,y+1)+2f(x,y+1)+f(x+1,y+1)-
f(x-1,y-1)-2f(x,y-1)-f(x+1,y-1)
(3)
式中A,B为数字图像矩阵的宽和高;f(x,y)为(x,y)处的灰度值。
2)拉普拉斯改进清晰度评价函数

|f(x,y)-f(x,y-1)|+f(x,y)-f(x-1,y)|+
|f(x,y)-f(x+1,y)|]
(4)
如图4,本次筛选实验以50 mm为调焦行程,在0.7倍,5 μm/脉冲调焦精度的条件下,步进电机每前行20个脉冲显微镜采集一幅图像;对调焦行程内采集的所有显微图像进行清晰度评价,并将评价值拟合成如图4(a)所示的曲线。对比分析上述12种空域类评价函数曲线的单峰型、无偏性等,本文最终选用Sobel算子和拉普拉斯改进算子两种清晰度评价函数,如图4(b)。
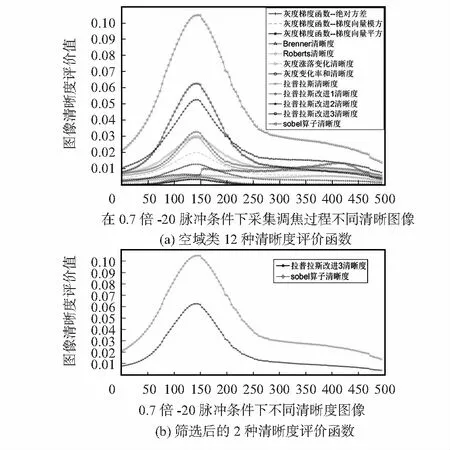
图4 空域类清晰度评价算法及筛选后的算法评价
4 视频显微镜自动调焦实验
实验台包括SZY—JX01连续变倍单筒显微镜、SZY—U500T 1/3CCD镜头、SZY—G5亮度可调节冷光源、3组步进电机及驱动器、2套齿轮传动机构、1套联轴器传动机构、2个固定连接片以及支架。其中,单筒显微镜变倍比为1︰6.3,在0.5倍镜条件下可实现(0.7~4.5)倍连续变倍;CCD镜头用于采集所获显微图像并传递至PC系统以便进行图像处理;冷光源用于图像采集时提供合适光亮;单片机通过脉冲信号控制3组步进电机经传动机构分别实现显微镜自动调焦、电控变倍和光照调节;连接片用于固定对应的步进电机并保证齿轮传动和联轴器传动的中心距适宜。
显微镜变倍物镜行程为0.5 mm,变倍手环可旋转角度312°,对应于(0.7~4.5)倍连续变倍。通过细分驱动,实验台调焦和变倍最小精度可达1 μm/脉冲;调焦、变倍处啮合齿轮传动比均为3︰1,齿轮模数0.5 mm。根据所受负载不同,本文选用如表1、表2所示步进电机及驱动器。
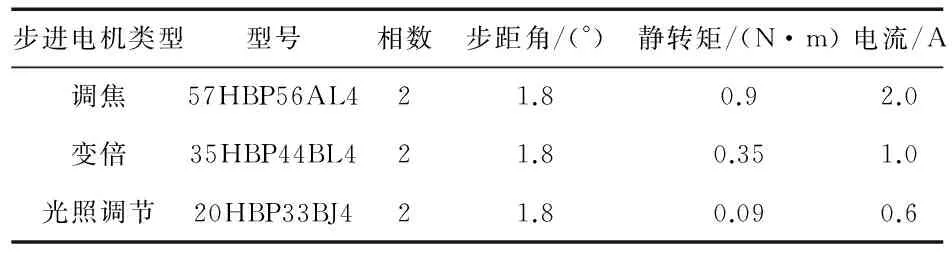
表1 步进电机参数
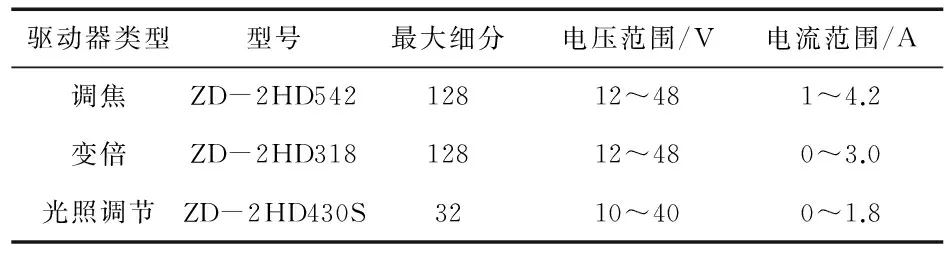
表2 步进电机驱动器参数
如前所述,在本实验平台上做低倍(0.7倍)、中倍(2.1倍)、高倍(4.5倍)自动聚焦实验。图5为在低倍0.7倍条件下采用取均值约束二次调焦的变步长自动搜索算法以及Sobel算子和拉普拉斯改进算子2种清晰度评价函数的自动聚焦实验过程。
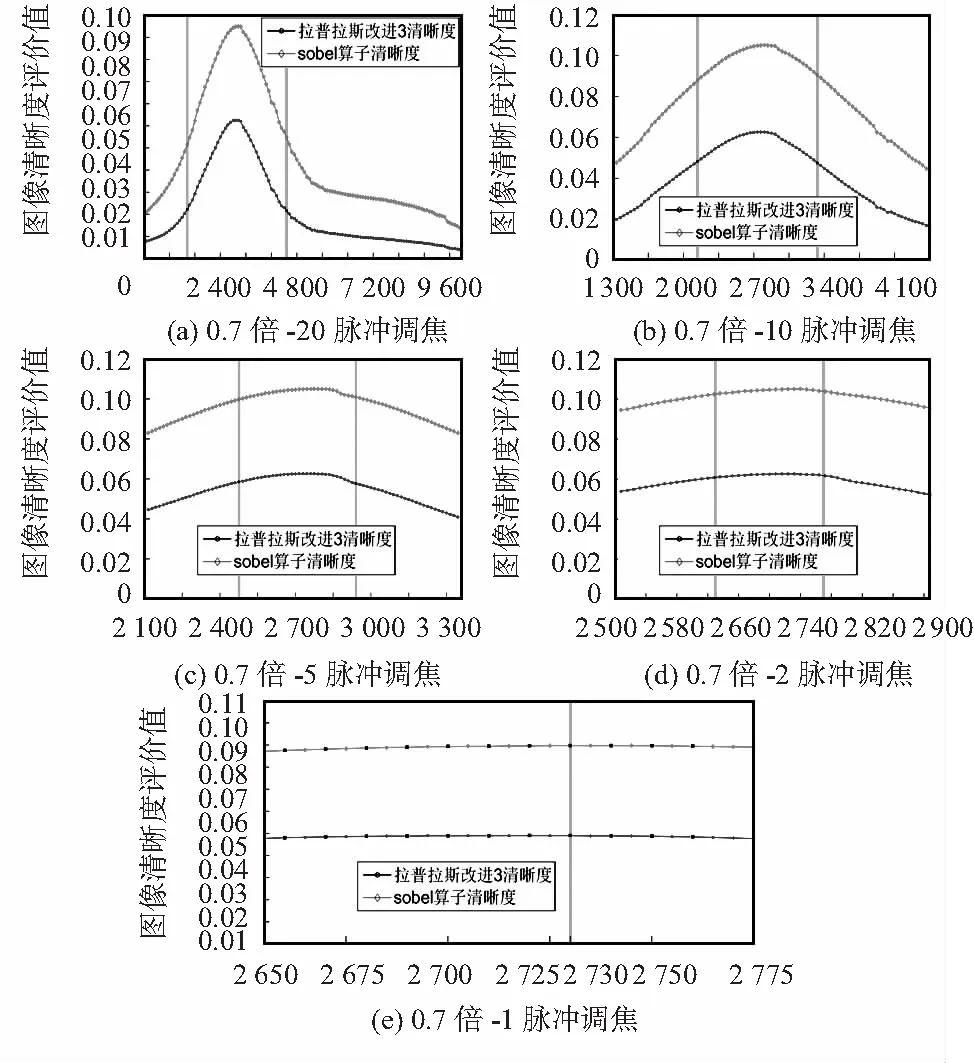
图5 低倍0.7倍聚焦实验
如图5(a),在低倍(0.7倍)、最小脉冲精度5 μm/脉冲的条件下,以大步长20脉冲/步,即每20个脉冲采集一幅显微图像并编号保存,本次调焦行程结束后将序列图像(编号分别为0,20,40,…,10 000,共500张)的清晰度评价值拟合成图5(a)的曲线。对所有离散评价值取平均值,则下次调焦行程被约束于图5(a)中两条竖线之内,而后依次步长减半进行如图5(b)~图5(e)所示的调焦过程,直至调焦步长如图5(e)所示1脉冲/步。图5(c),图7(d)过程为粗调焦到精调焦过渡的过程,5脉冲步长减半后为2.5脉冲,取整为2脉冲。
如图5所示的聚焦实验:图5(a)~图5(c)为粗调焦过程,此时图像评价值之间的差值较大,图形上升与下降较陡,这是因为这一阶段离焦图像较多,其邻域的灰度值变化较大,而基于空域类评价算法均为对邻域做运算,因此,粗调焦过程表现在图形中评价值之间有较大的落差,这与理论上粗调焦过程以大步长在短时间内初步获取正焦位置的目的相符。而图5(d),图5(e)为精调焦过程,图形较平缓,这是因为在进行了图5(a)~图5(c)三次粗调焦之后,正焦位置已经被约束在较小的范围之内,只需在该范围内做进一步确认便能找寻最佳成像位置。图5(e),调焦刻度2 730对应于两条评价曲线最大值处,即为最佳正焦位置,对应的第2 730张序列图像即为最清晰图像。同理,中倍(2.1倍)、高倍(4.5倍)自动聚焦实验亦如上进行分析。低倍(0.7倍)、中倍(2.1倍)、高倍(4.5倍)自动调焦实验过程采集的部分序列显微图像如图6所示。

图6 三种放大倍数自动调焦过程采集的序列显微图像
5 结束语
1)对现有的视频显微镜进行了自动调焦、电控变倍和光照调节数字化改造,并通过单片机控制实现其精确调节;
2)结合Matlab数字图像处理和图像清晰度评价算法,采用取均值约束二次调焦的变步长自动搜索策略,在消除图像噪声的同时,大幅减少了调焦时间;
3)改造后的显微镜在目标定位和运动控制精度方面有了很大改善,降低了对操作经验限制的同时,极大提高了图像获取的质量和效率。
[1] 刘 畅,甘 奇,马 驰,等.触控自动化显微成像系统[J].传感器与微系统,2015,34(3):106-109.
[2] 宋新宇.显微镜自动控制系统的设计与应用分析[J].科技创新导报,2013(12):172-173.
[3] 汪华俊,郭宝峰.基于嵌入式平台的声光一体化采集平台设计[J].传感器与微系统,2017,36 (9) :91-93.
[4] 坂本正文.步进电机应用技术[M].王自强,译.北京:科学出版社,2010:3-6.
[5] 王剑华,邓华秋,陈参宁,等.数字自动对焦中的搜索算法研究[J].传感器与微系统,2012,31 (5):51-54.
[6] 孙红利,冯 旗,董 峰.图像清晰度评价算法研究[J].传感器与微系统,2017,36(2):67-70.
[7] 刘连杰,陈 朋,杨 雷.一种用于平滑视频聚焦的自适应搜索算法[J].东南大学学报,2010(S1):25-29.
[8] 金 雪,马卫红.图像调焦过程的清晰度评价函数研究[J].光学仪器,2012,34(1):59-64.
[9] 钱 青,减冬菊.一种改进的Sobel算子图像清晰度评价函数[J].计算机与数字工程,2015,43 (10) :1865-1870.
[10] 孙晓龙,王正勇,符耀庆,等.基于改进拉普拉斯能量和的快速图像融合[J].计算机工程与应用,2015,51(5):193-197.
Designofautofocusingcontrolsystemofembeddedvideomicroscope*
XU Gong-yuan1,2, HU Bin-liang1,2, KANG Hui-min1,2, LIU Yan-yu1,2
(1.CollegeofMechanicalandElectricalEngineering,HunanUniversityofScienceandTechnology,Xiangtan411201,China;2.HunanProvincialKeyLaboratoryofHealthMaintanceforMechanicalEquipment,HunanUniversityofScienceandTechnology,Xiangtan411201,China)
Aiming at the situation of low efficiency and poor precision of manual focusing of video microscope,difficult to get the best microscopic image,an automatic focusing control system based on embedded development and Matlab digital image processing is designed.Through adding precise transmission mechanism to the microscope focus hand wheel and zoom hand wheel and light adjustment,the single-chip circuit control part realizes the counting pulse acquisition and the motor control.Acquired sequence of microscopic images are transmitted to PC through charge coupled device(CCD) camera,and the Matlab image processing software determine its clarity.Combined with the designed 'take the mean' to adjust the secondary focus of the variable step size automatic search algorithm to find the most clearest microscopic images,thus complete the auto focusing process.The experiment shows that the system can completely replace the traditional manual focusing operation with higher precision.In the subdivision drive conditions,the process of focusing and zooming can reach 1μm of the minimum precision.
video microscope; transmission mechanism; single chip; image processing; automatic focusing
10.13873/J.1000—9787(2017)12—0071—04
TH 742; TP 271
A
1000—9787(2017)12—0071—04
2017—10—17
国家自然科学基金资助项目(61272196);湖南省教育厅重点项目(15A063);湖南省自然科学基金资助项目(2017JJ2090);湖南省研究生科研创新资助项目(CX2016B550)
许功元(1990-),男,硕士研究生,研究方向为计算机视觉、自动化控制、机械设计,E—mail:1048823287@qq.com。胡斌梁(1964-),男,通讯作者,教授,研究生导师,主要从事现代设计理论与方法、机械系统动力学研究工作,E—mail:604302463@qq.com。