五轴数控模拟机调试与维修实训设备的设计
2017-12-06祁宇明
王 帅,祁宇明
(天津职业技术师范大学机器人及智能装备研究所,天津300222)
五轴数控模拟机调试与维修实训设备的设计
王 帅,祁宇明
(天津职业技术师范大学机器人及智能装备研究所,天津300222)
数控模拟机调试与维修设备是由五轴模拟机通过串口通信和实训设备进行连接组成。首先对调试与维修设备的整体结构进行阐述,随后对五轴模拟机的整体、模拟系统及模拟软件OpenGL的工作流程、实训设备的数控装置、操作面板及面板通讯协议、电气模块、数控维修模块等分别进行了介绍。实训设备适用于数控维修、数控加工、机电一体化等专业的数控机床调试与维修实验实训、企业职工的培训等,有利于学生、学员快速地掌握相关技能,该设备在教学与实训中表现良好。
五轴数控模拟机;OpenGL技术;实训设备
1 引言
中国制造强国战略制定了十年行动纲领——中国制造2025,在2025高端装备创新工程中对高档数控机床提出了新的目标,研发具有精密、高速、高效的高档数控机床[1]。五轴数控机床普遍适用于各种型号及外形复杂的零部件加工,因此在生产和科研中五轴数控机床具有重要的作用。由于大型的五轴数控机床因制造成本、维修费用高昂,在有的学校、培训机构对五轴数控机床的使用会严格控制,有的地方只是作为一种参观设备,容易造成学员在数控机床的使用、维修等方面知识掌握得不是很好[2]。
针对五轴数控机床的制造成本、维修费用、学员动手机会少等各种情况,并为满足社会对数控人才的需要,让学生、学员对数控机床的工作流程、机床结构及系统构成、机床电气工作流程和故障判断与维修等相关方面有些了解,研发了一套开放式、模块化、低成本的五轴模拟机调试、维修实训设备。
2 五轴数控模拟机调试与维修实训设备的组成
五轴数控模拟实训设备由五轴模拟机和实训设备两部分组成,两部分的通讯是由串口连接并实现通讯[3]。通过模拟机半实物仿真数控操作面板传输命令到工控机中进行计算操作,并由OpenGL软件中的API函数驱动虚拟机床,完成对应的动作,由OpenGL软件中的反馈系统接收到工控机处理的反馈信息,并将其实时显示到数控面板上。图1所示为五轴数控模拟机实训设备工作流程图。图2为五轴数控模拟机实训设备实物图。
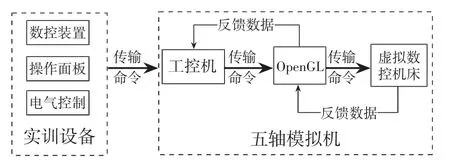
图1 五轴数控模拟机实训设备工作流程图
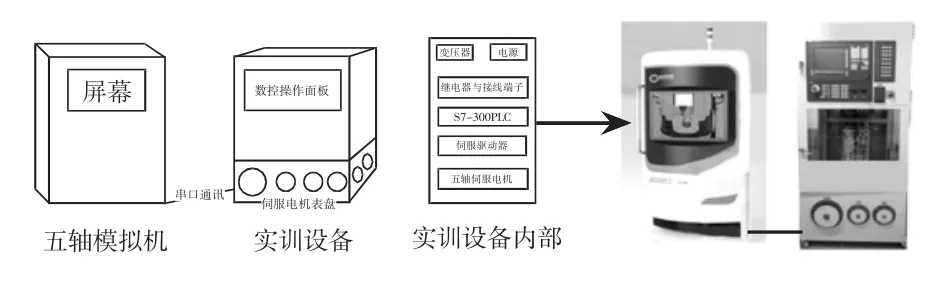
图2 五轴数控模拟机实训设备实物图
3 五轴数控模拟机构成
3.1 五轴数控模拟机
如图3所示为五轴模拟机。五轴数控模拟机能够让加工制造类企业方便地实现加工代码的编写和检验,为进行真实机床加工节省了时间,提高了生产效率[4]。五轴数控模拟机特点如下。
(l)模拟机采用1:1的设计模式,实现立体的模拟系统有着与实体机床一样的效果,模拟系统在模拟场景中可以对机床及加工背景进行构建,也可以对毛坯、夹具的外形尺寸进行定义;
(2)支持实时手动输入的加工代码、还支持CAD/CAM等软件编写而生成的加工代码;
(3)拥有反馈能力:可针对刀具、零件、床身的相互碰撞做出变色发声等警告和反馈,具有欠切、过切反馈功能,能给虚拟机床各轴设置行程限制,超出限制时发出警告,有一定的加工代码查错功能等;
(4)可以完成五轴数控机床各种加工辅助的模拟,比如三色灯状态显示会随加工状态的变化而变化,还能模拟加工过程中的切屑、切削声音等。使模拟机更加接近真实机床;
(5)通过立体模型运动模拟工件切削过程,能够对立体模型进行局部放大或缩小、调整视角等操作;
(6)拥有人性化的后台及前台人机交互界面,操作者能体验到与真实机床相同的感受[5]。
图3 五轴模拟机
3.2 模拟系统
五轴数控模拟机的模拟系统由目前较为成熟的窗口可视化程序C#开发平台和具有工业标准性、稳定性、可扩展性、简单易用性的OpenGL系统平台组成[6]。
虚拟现实数控加工仿真系统由虚拟机床构建系统、数字控制系统、人机交互系统、仿真效果功能系统、立体视觉及硬件系统组成。打开仿真软件,通过虚拟机床构建系统,按照所需要工件的加工特点与要求对机床模型进行构建,随后操作人员经过人机交互系统对相应的软件发出对应的指令,发出的指令经过数控系统的分析处理,将处理后的结果反馈到仿真系统中,驱动虚拟机床运行。
人机交互系统是实现人与机器交流的一种对接窗口,可以对数控模拟机下达相应的命令、选择需要的工作界面、观察机床加工的过程;仿真效果功能系统可以构建虚拟机床与加工所需要的毛坯,展现毛坯在机床上加工的效果;立体显示及硬件系统的组成可以立体地展示虚拟的加工环境[7]。如图4所示为虚拟加工仿真系统组成。

图4 虚拟加工仿真系统组成
Open GL软件工作流程如图5所示。控制程序进入OpenGL软件,通过几何顶点数据和图像像素数据存储在显示列表中。几何图形通过处理转化为几何顶点数据后,数据再经过运算器、顶点计算操作和图像像素数据经过图像操作、纹理映射方法,将两种处理后的数据进行光栅化处理、逐个顶点操作处理后将光栅数据写入帧缓冲器,实现图形的显示[8]。
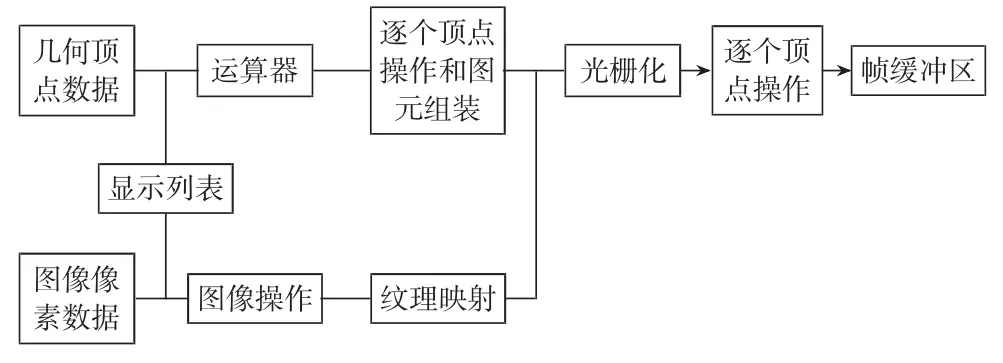
图5 Open GL软件工作流程图
通过Open GL按实际比例进行机床模型的绘制,模拟各轴的运动,构建模型如图6所示。
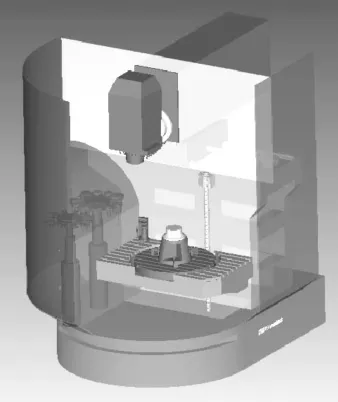
图6 虚拟机床模型
Open GL的全称为开放式图像编辑库(Open Garphics Library),Open GL是一种图形开发环境,其作用是让客户将传统的计算机编程软件从硬件系统中解放出来,为图形工作站服务,具有独立于窗口操作与计算机硬件环境的特点,进行图形编辑时不用花较多的时间去理解系统的主要结构和控制指令,在OpenGL系统平台中软件的执行是使用固定的格式来完成应用程序的编写[9]。
OPen GL具有如下基本功能[10]:①拥有完整的图形编辑命令,可以非常方便地对实际物体进行模拟绘制,还可以进行系列基本变换,对基本图形单元进行合理的控制变化,产生所需要的图形;②拥有光照处理效果对三维图形进行光照处理和渲染,可以使所绘制的图形具有较为真实的视觉感;采用位图模式进行图形编制,根据多个点、线、面以及多边形的反走样函数程序,有效地对图像边界锯齿进行弱化和消除,达到清晰显示的目的;③Open GL通过设置RI图形缓冲区来实现动画的演示,通过运用双通道缓冲方式,在系统内存中了构建多个基本场景界面帧,而动画的播放是多个已缓存的动作帧进行播放的,也就是画面在播放时,系统在缓存接下来的多个帧,这样有利于图像地快速处理。
4 调试与维修设备构成
调试与维修设备主要包括数控装置、操作面板和电气控制模块。整个的设备采用立体式、开放式、网孔形式的控制柜,便于学员能够很好地理解、掌握数控机床工作原理和故障排除。数控装置、操作面板位于控制柜的前面上方,符合人正常工作时的操作模式。电气控制模块位于控制柜的里面。如图7所示调试与维修设备。
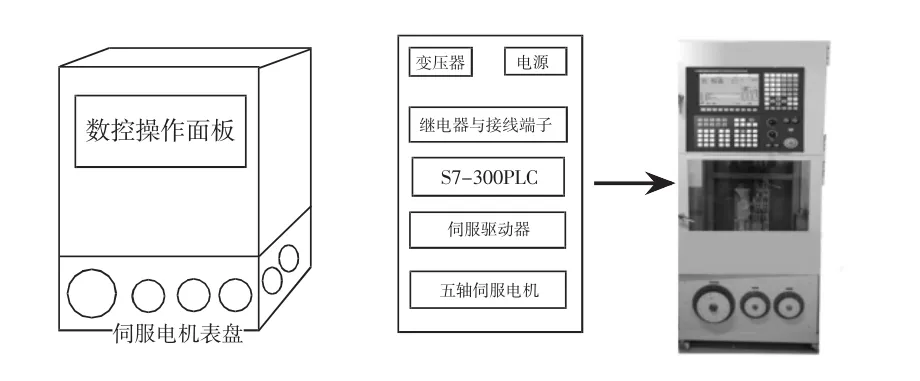
图7 调试与维修设备
4.1 数控装置及操作面板
数控装置系统采用了Sinumerik840D控制系统,系统中的全数字控制系统由Sinumerik_611数字驱动系统和Simatic7可编程控制器组成,适合多类型、多种类、多批次的加工任务,拥有非常好的动态效果与精度控制;系统还包括标准的PC软件、硬盘、奔腾处理器,拥有多个接口完成程序的存储、读入、打印等工作[11]。如图8所示为840D控制系统操作面板。

图8 操作面板
数控操作面板的工作原理是将数控编程语言进行转化成统一的、可被读取到的程序代码,并显示所需的数据,例如主轴转速、当前刀号等数据[12]。表1所示为面板通讯协议。

表1 面板通讯协议
数控面板采用单片机内和矩阵键盘的方式组成,满足组合键的使用。符号语言的转换,“=”作为在数控编程语言中转换成PMAC运动控制卡中的符号为“EQ”,替换语句如下:stra JG=Replace(stra JG,"EQ","=",1,-1,0)同样的还有“!=”、“>”、“!<”、“<”和“|”分别替换为“NE”、“GT”、“GE”、“LT”和“OR”[13]。

图9 数控系统控制
用户坐标系转换,例如在数控编程语言中,G54坐标系数据与PMAC运动控制卡进行符号的转换,例如:“G54X300.Y300.Z300.”,替换语句如下:stra JG=Replace(stra JG,“G54”,“G54 X”&TextX.Text&“Y”&TextY.Text&“Z”&TextZ.Text,1,-1,1),同样的还有 G55~G59的用户坐标系[13]。如图9所示数控系统控制。
4.2 电气控制模块
电气控制模块位于控制柜的里面,利用线槽将电器柜分成5个空间,从上到下依次为24VDC电源;电源开关、接线端子和继电器;SimaticS7-300PLC;交流伺服驱动系统;交流伺服电机和交流主轴电机[14]。电气柜的分布放置可以让学员简单、清楚地学习低压电器的选择、使用;可以更好地理解数控机床的电路设计及工作原理,能够很好地观察数控机床电气模块的运行情况。交流伺服电机连接着表盘,通过表盘能够清楚地知道模拟机床各轴的运动动作和空间行程。图10所示为电气控制模块。图11所示为伺服电机运动表盘。

图10 电气控制模块
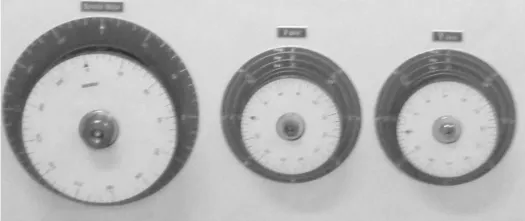
图11 伺服电机运动表盘
4.3 数控维修模块
数控机床的信号的输入/输出是通过I/O接口实现传输与通信的,所以机床的故障可以通过I/O接口这个通道表现出来,并进行排除;有些故障可以通过CRT显示故障报警信息进行排查,当机床出现故障后,数控系统通过分析处理将报警信息显示在CRT上,依据报警信号灯和警告界面出现的内容查看数控机床使用手册对故障进行分析、处理,进而排除故障[15]。
5 结束语
五轴模拟机调试与维修实训设备是将虚拟机床和实训设备结合起来进行研究。整套设备采用了开放式的结构设计,将虚拟机床、电气控制线路、数控操作系统、数控操作面板、运行电机,都明了地呈现在学员面前。设备的研制不仅可以解决因真实五轴机床体积大导致占地空间大的问题,还解决了因五轴机床成本、维修费用高致使学校、培训机构因资金不足而不能购买大量的五轴机床,组建实训室的问题,可以让学员们对五轴机床有个直观的体验,对五轴数控机床系统的基本参数的设置、PMC编程、电气控制系统的硬件连接与调试等技能可以直观学习。设备能够很好地实现数控机床的基本功能,在教学、培训过程中效果较好,对社会中缺少五轴数控机床实践操作的人员提供了很好的解决方法。
[1]国家制造强国建设战略咨询委员会.中国制造2025[M].电子工业出版社,2017.
[2]郑 鑫.五轴联动数控加工中心仿真系统开发应用[J].CAD /CAM 与制造业信息化,2010.10(10):87-90.
[3]向 倩.基于FANUC数控综合实验系统的设计与研究[D].西南科技大学,2013.
[4]扈志远.采用映射模型算法与触摸屏的虚拟数控仿真系统研究[D].西南交通大学,2011.
[5]岳 刚.五轴数控机床模拟训练机研发[D].天津职业技术师范大学,2016.
[6]王永忠.基于Open GL的虚拟机床建模与仿真[D].西北工业大学,2004.
[7]马 超.虚拟现实数控加工仿真系统研究与开发[D].陕西科技大学,2015.
[8]李光耀,刘 剑,李启炎.用OpenGL实现数控加工仿真中的图形显示[J].计算机辅助工程,2002,(1):59-62.
[9]朱 军.基于Open GL的数控仿真系统研究与开发[D].南京理工大学,2006.
[10]陈加婷.基于Open GL的数控铣削加工几何仿真关键技术研究[D].哈尔滨理工大学,2015.
[11]刘春来.Siemens802D数控教学系统数控程序解释器的开发[D].哈尔滨工业大学,2011.
[12]岳 刚,邓三鹏,孙奇涵.基于PMAC的数控系统手轮功能研究[J].机床与液压,2016,(4):36-37.
[13]岳 刚,孙奇涵,邓三鹏.基于PMAC的多系统数控机床研究[J].机械工程师,2015,(10):89-90.
[14]吴会波,张永昌,马韧宾.数控机床装调、维修综合实训系统开发与应用[J].石家庄职业技术学院学报,2014.
[15]邓三鹏,张香玲,杨德治.现代数控机床PLC相关故障诊断及维修[J].制造业自动化,2008,(10):44-46.
Design of debugging and maintenance training equipment for five axis NC simulator
WANG Shuai,QI Yu-ming
(Institute of Robotics and Intelligent Equipment,Tianjin University of Technology and Education,Tianjin 300222,China)
The NC simulator debugging and maintenance equipment is composed of the five axis analog machine connecting with the training equipment through serial communication.Firstly,the overall structure of the debugging and maintenance of the equipment are described,and then the system simulation software OpenGL,the whole working process simulation of the five axis simulator,the training equipment composition,the CNC device,the operation panel and communication protocol,the electrical module,the CNC maintenance module etc.are introduced respectively.The training equipment is suitable for the CNC maintenance,the CNC machining,the electromechanical integration professional CNC machine tools for debugging and maintenance training,the enterprise staff training etc.,which is helpful for students and staffs to master the relevant skills quickly,and it has good performance in practical teaching and training.
five axis NC simulator;OpenGL technology;training equipment
TP29
A
1005—7277(2017)03—0035—05
王 帅(1990-)男,硕士研究生,主要研究方向为智能机器人及其应用技术。
祁宇明(1979-)男,副教授,工学博士,硕士研究生导师,天津职业技术师范大学机器人及智能装备研究所副所长,主要研究方向为机器人技术及应用、信号采集与分析。
2017-01-16
