基于LMI的永磁同步电动机定子磁链观测研究
2017-12-06虞嫣然韩如成闫庚龙赵昊广
虞嫣然,韩如成,闫庚龙,赵昊广
(太原科技大学电子信息工程学院,山西太原030024)
基于LMI的永磁同步电动机定子磁链观测研究
虞嫣然,韩如成,闫庚龙,赵昊广
(太原科技大学电子信息工程学院,山西太原030024)
为了提高永磁同步电动机直接转矩控制系统在定子电阻值变化时定子磁链的观测性能,提出了一种改进自适应定子磁链观测器的设计方法,该方法采用线性矩阵不等式迭代算法代替传统极点配置方法来获取增益矩阵。仿真结果表明,改进的方法可以提高定子电阻的辨识精度,改善定子电阻变化时定子磁链的观测性能。
永磁同步电动机;直接转矩控制;定子磁链观测器;定子电阻辨识
1 引言
在电机的直接转矩控制系统中,定子磁链观测是重要环节之一。而且在直接转矩控制中,定子磁链观测需要用到电动机的电气参数,其中定子电阻的变化是影响定子磁链观测准确性的最主要因素[1]。永磁同步电动机在电气参数的辨识方面常用的方法有最小二乘法[2]、扩展卡尔曼滤波法[3]、模型参考自适应法[4][5],还有离线辨识法[6]。为了实现对定子磁链的准确观测,需要克服系统的时变性,也就是在系数矩阵参数准确值未知的情况下对定子磁链进行准确观测。本文采用模型参考自适应法进行定子磁链观测。
反馈增益矩阵的设计在自适应状态观测器中是至关重要的,将会对观测器的稳定性和动态响应性产生影响。通过极点配置方法得到的增益矩阵构成的自适应磁链观测器可能存在观测不稳定现象,其主要原因是辨识算法不准确、增益矩阵选择不合理,以及正比系数的选择将会影响定子电阻在线辨识的精度。为了解决这些问题,本文提出了一种改进自适应定子磁链观测器的设计方法,采用线性矩阵不等式迭代算法代替传统极点配置方法来获取反馈增益矩阵。这种方法可以提高定子电阻辨识的精度,同时可以保证自适应磁链观测器在较宽速度范围内稳定运行。
2 永磁同步电动机自适应定子磁链观测器
2.1 永磁同步电动机数学模型
隐极式永磁同步电动机在两相静止α-β坐标系下的数学模型如式(1)所示:
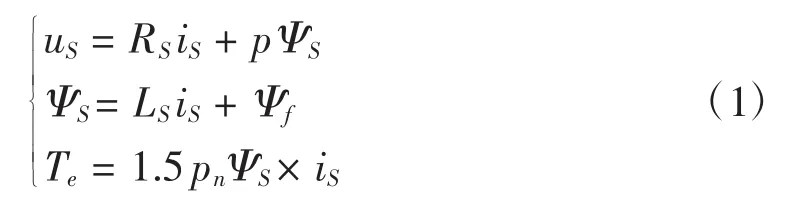
式中:
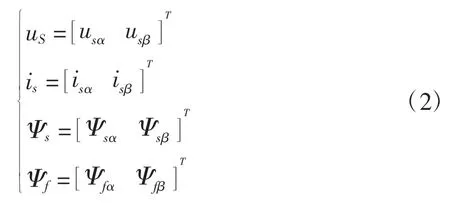
分别为定子电压矢量、定子电流矢量、定子磁链矢量和转子永磁体磁链矢量。Te为电磁转矩;RS为定子相电阻;LS为定子相电感;pn为电机极对数;p为微分算子;Ψf为永磁体磁链幅值。
2.2 定子磁链状态观测器设计
根据上述电动机数学模型可构建磁链观测器模型,令 x=ψs为状态变量,为输入变量,y=iS为输出变量,隐极式永磁同步电动机的状态方程与输出方程如下:

设计对定子磁链进行观测并辨识电动机参数的全阶定子磁链状态观测器如下:

2.3 带定子电阻辨识的定子磁链观测器
永磁同步电动机运行时定子电阻阻值会随着温度的变化而变化。因此在状态观测器中增加自适应机制进行定子电阻辨识,可以有效地抑制定子电阻阻值变化对定子磁链观测造成的影响。采用Lyapunov稳定性定理设计自适应规律,从式(3)和式(4)可以得到状态观测器的动态误差方程:

本文提出的带定子电阻辨识的自适应定子磁链观测器原理框图如图1所示。

图1 自适应定子磁链观测器
3 基于线性矩阵不等式的定子电阻辨识
3.1 定子电阻辨识律推导
图1所示为自适应定子磁链观测器原理框图,用线性矩阵不等式迭代算法求取增益矩阵,利用Lyapunov稳定性定理对定子电阻辨识律增加一个自由度的基础上进行推导。为了推导电阻辨识律,以及研究观测器误差的动态稳定性,定义如下的Lyapunov函数:

式中,λ为正常数,G为正定矩阵。此时Lyapunov函数中将包含两个待求矩阵变量K和G,其中矩阵G为Lyapunov函数求导后所得,与极点配置法相比多了一个自由度。为了满足Lyapunov不等式的成立条件需要选择合适的矩阵变量G。从而可以保证自适应磁链观测器运行的稳定性,也可以提高定子电阻辨识精度。
将式(6)对时间求导可得:
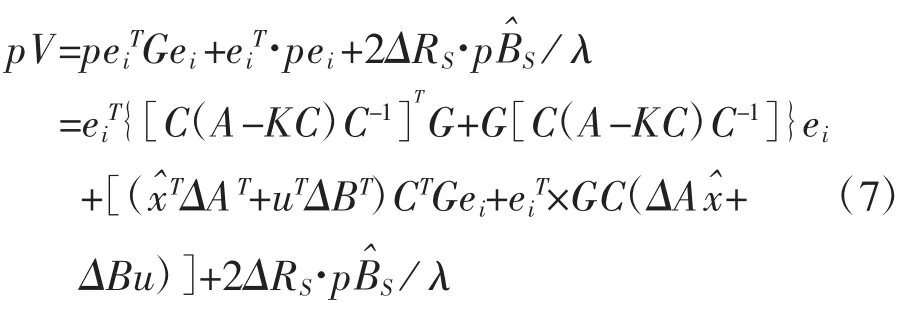
根据Lyapunov稳定性定理可知,为了保证观测器渐进稳定,需要满足上式中第一项[C(A-KC)C-1]TG+G[C(A-KC)C-1]<0,令上式中的第二项和第三项之和为零,得到如下的定子电阻自适应规律:

3.2 观测器增益矩阵求解
根据Lyapunov稳定性定理,状态观测器渐进稳定的一个最重要的条件是存在一个正定矩阵G使得下式成立:

式(9)中有两个待求矩阵K和G,为了求解上述不等式,再定义一个矩阵如下:

若矩阵K和矩阵G能够使 max(eig(B(G,K)))<0,(max(eig(B(G,K)))为矩阵B的最大特征值)。则矩阵K和矩阵G也可以满足式(9)。
通常矩阵K和矩阵G可以采用迭代算法进行计算。使用Ma tlab中LMI工具进行求解矩阵详细步骤如图 2 所示[8]。

图2 基于LMI求解矩阵流程图
4 基于定子磁链自适应辨识的仿真研究
利用Matlab/Simulink实现基于定子磁链自适应辨识的永磁同步电动机直接转矩控制系统如图3 所示[9]:
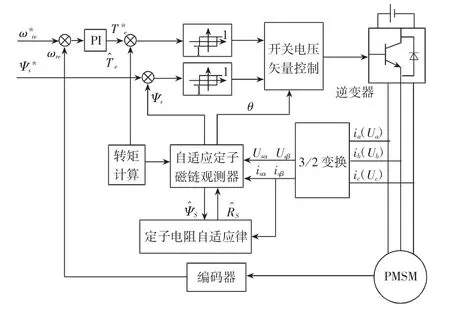
图3 基于定子磁链自适应辨识的DTC系统框图
图3所示的仿真过程中所需电机参数设定如表1所示。

表1 电机参数
仿真中,t=0s时刻速度给定值由0r/min突变为 400r/min,电机负载为 4.5N·m。采用了极点配置的方法(图中由con表示)和线性矩阵不等式迭代算法(由LMI表示)求解增益矩阵。
利用极点配置法求解增益矩阵时定子电阻辨识值为0.4694Ω,与实际相比误差为1.2%。利用线性矩阵不等式迭代算法求解的定子电阻辨识值0.4701Ω,与实际相比误差为0.2%。将两者进行对比,改进后的方法对定子电阻辨识得更加精确,提高了定子磁链观测精度,同时也提高了辨识定子电阻的速度,辨识结果如图4所示。
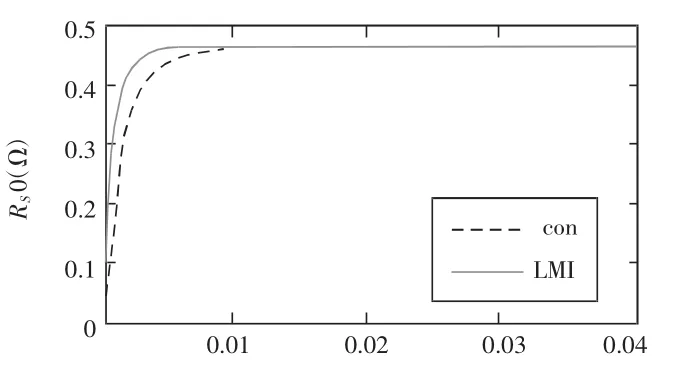
图4 =0时改进前后定子电阻辨识对比图
改进前后定子磁链α分量如图5和图6所示,在0.01s时改进前后的定子磁链波形图上下波动幅值分别为0.07Wb和 0.01Wb。分别在图 5和图 6中取 0.02s-0.021s时的局部波形图,可以看出改进后的磁链变化更加平稳,磁链波动很小。

图5 改进前定子磁链α分量图

图6 改进后定子磁链α分量图
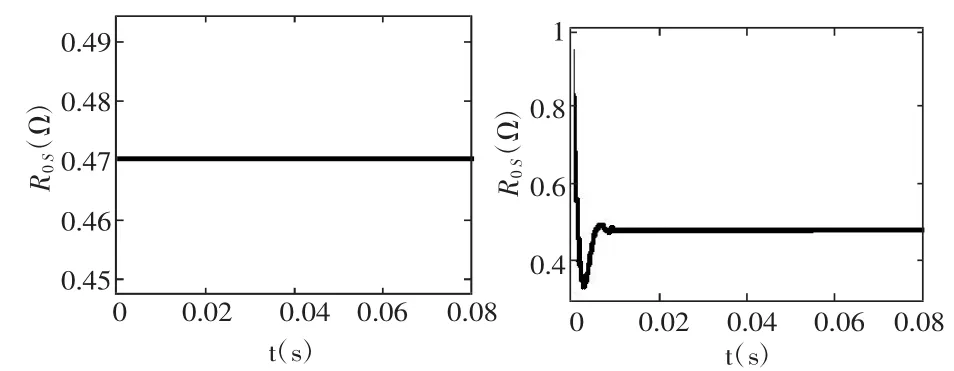
图7 分别为=RS和=2RS时定子电阻辨识

图8 =2RS时观测的定子磁链的速度、幅值响应波形
文中自适应定子磁链观测器在采用线性矩阵不等式算法求取增益矩阵后对定子磁链进行观测,当定子电阻初始设定值出现错误时,可以快速地辨识出实际的定子电阻值,同时定子磁链幅值能够稳定在给定值,使定子磁链的观测与控制不受定子电阻误差的影响,有较好的鲁棒性。
5 结束语
本文为了改善定子电阻变化对定子磁链的观测性能的影响,对永磁同步电动机直接转矩控制系统提出了一种改进的自适应定子磁链观测器设计方法。采用线性矩阵不等式迭代算法代替极点配置方法来获取增益矩阵。并且采用Matlab/Simulink仿真工具验证了改进后的定子磁链观测器可以快速地辨识与提高定子电阻辨识的准确性,并且有较好的鲁棒性。
[1]樊明迪.永磁同步电机直接转矩控制技术研究[D].西北工业大学,2014.
[2]向纯靖,李长兵.基于最小二乘法的永磁同步电动机参数辨识[J].微特电机,2012,40(02):30-33.
[3]王 磊,李 宏,武明珠,解佳鹏.基于扩展卡尔曼滤波的永磁同步电动机参数辨识[J].微特电机,2012,40(07):19-22.
[4]张华强,严洪峰,冷艳礼,王学义.基于模型参考自适应的 PMSM 在线辨识研究 [J/OL].电气传动,2015,45(12):3-7.
[5]Model reference adaptive controller-based speed and q-axis inductance estimation for permanent magnet synchronous motor drive by utilizing reactive power.Siva Kumar J S V,Sai Kumar P,Rambabu M.2011International Conference on Energy Automation and Signal(ICEAS 2011).
[6]柳 晶,刘桂花,王 卫.永磁同步电机参数离线辨识方法的研究[J].电源学报,2011,(01):26-30.
[7]安群涛,孙 力,赵 克.一种永磁同步电动机参数的自适应在线辨识方法[J].电工技术学报,2008,(06):31-36.
[8]夏奕凤.直接转矩控制定子磁链观测方法的研究[D].西南交通大学,2010.
[9]胡伟才.基于新型定子磁链观测器的永磁同步电机直接转矩控制[D].天津大学,2012.
Research on stator flux observer of permanent magnet synchronous motor via LMI approach
YU Yan-ran,HAN Ru-cheng,YAN Geng-long,ZHAO Hao-guang
(College of Electronical and Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
In order to improve the performance of the stator flux observer of the direct torque control system of the permanent magnet synchronous motor when the stator resistance changes,an improved design method for the stator flux observer is proposed.The method adopts the linear matrix inequality iterative approach to replace the pole placement method to obtain the gain matrix.The simulation results show that this new method can improve the accuracy of the stator resistance identification when it changes,also can improve the performance of the stator flux observer.
permanentmagnetsynchronousmotor;directtorquecontrol;statorfluxobserver;resistanceidentification
TM301
A
1005—7277(2017)03—0009—04

虞嫣然(1992-),女,太原科技大学,硕士研究生,主要研究方向为现代交流调速理论与研究。
韩如成(1959-),男,太原科技大学,教授,硕士生导师.研究领域:电气传动和谐波抑制与无功补偿。
闫庚龙(1994-),男,太原科技大学,硕士研究生生.研究领域:永磁同步电机调速。
赵昊广(1991-),男,太原科技大学,硕士研究生.研究领域:机器人技术。
2016-11-01
