基于超长距离下行皮带控制的矿山两化融合建设
2017-12-06赵海军
赵海军
(1.天水电气传动研究所有限责任公司,甘肃天水741020;2.大型电气传动系统与装备技术国家重点实验室,甘肃天水741020)
基于超长距离下行皮带控制的矿山两化融合建设
赵海军1,2
(1.天水电气传动研究所有限责任公司,甘肃天水741020;2.大型电气传动系统与装备技术国家重点实验室,甘肃天水741020)
基于超长距离、高落差、分段控制的矿山胶带运输系统的建设,集成矿山工业视频监控系统、矿井环境监控系统、矿井安全六大系统、电力监控系统、能效管理系统、调度管理等系统,阐述了实现整个矿山数字化、信息化两化融合的过程。重点说明了在大型矿山长距离、高落差的胶带运输传动和自动化的建设方案,针对胶带运输的特性采用S型速度加速度的驱动控制,超长距离通信采用双网冗余、双网环形自愈的总线结构及矿山数据的集中存储和矿山调度的分级管理,为同类系统建设提供成功建设方案。
超长距离;高落差;分段控制;总线双网冗余;环形自愈;S型速度加速度调节;数据集中存储;调度分级管理
1 引言
由于矿山开采的特殊性,开采的矿料一般都在远离矿料处理和装运的井下或矿山顶部,因此矿山开采后的矿料需要运输到破碎装矿区,国内矿山中长距离矿石运输有采取架空索道料斗运输的,也有采用斜井胶带机运输的,但根据地势采取分段驱动的胶带机运输方式的还比较少。前两种方式由于要建设索道或打通隧道,建设投资较大。对于控制系统来说,无论索道料斗运输还是斜井胶带运输,在运输沿线均设置了电磁站,并在各电磁站设置岗位操作工操作各站设备的运行,通过生产调度系统人为指挥设备的开启,并没有达到集中控制无人值守的状态,设备的运行参数也没有达到集中监控的状态。
本文针对胶带运输长距离、大跨度、高落差曲折运行的特点,优化传动控制方案和控制方式,在提高控制工艺和降低运行成本的前提下,将以往独立的工业电视监控系统、矿井环境监控系统、胶带运输系统、电力监控系统等进行了融合,采用大容量数据库采集存储相应的数据,软件智能分析当前的运行环境(如电力参数、硐室气体浓度、硐内通风以及实时画面监控等),将数据归纳统计实现矿山开采系统的数字化。
2 方案设计
2.1 超长距离胶带机分段驱动方案
根据超长距离胶带运输的曲折地理形势,采取分段转运的方式。胶带被分为3种运行区段:上运区段、平运区段、下运区段。在不同的运行区段,配置独立的胶带传动系统和电气传动系统。对电气传动系统而言,根据3种运行区段的负载变化情况,选择不同类型的变频传动系统:二象限运行和四象限运行变频器。电气传动系统的合理配置,优化了系统运行方案,节约了控制系统成本。
上运胶带机:由于上运胶带机倾角大,启动过程要求速度平滑,防止矿石滑落。采用变频器驱动,无极变速,多机驱动功率自动均衡分配,过载自动保护。配置机械逆止器,防止逆转时胶带机飞车及机械设备损坏等问题。
平运胶带机:运行工况水平,启动、运行、停止过程平稳。选用单轴模块化驱动系统,具有较高的控制精度和稳定的速度。
下运胶带机:下运胶带机带重载后,电动机将物料的势能转换为电能,由电动状态转变成发电状态。选用具有回馈功能的变频器将电能回馈至电网。制动装置结合PWM整流四象限变频器的零速转矩功能,闸控指令与变频器电磁转矩实现可靠闭锁控制方式,解决了下行胶带的重负荷平稳启停车问题。
2.2 分散驱动集中控制
由于设备分布较分散,在每段胶带机驱动电机旁设置独立电磁站,配备高压开关柜、变压器、低压配电柜、变频柜、程控柜、制动柜等。集控室设在调度中心,可完成对所有电磁站设备的监控功能,对每条胶带机的运行实现协调控制。每个电磁站可独立完成对本段胶带机的驱动控制,具有机旁控制和远程控制功能,正常生产时可无人值守,节约了人工成本,提高了设备的自动化控制水平。
2.3 优化的速度和加速度驱动模型
胶带机为柔粘性力学系统,具有明显的运动力学特征,在启动加速、停车减速及张力变化过程中均呈现出复杂的运动力学特征。根据张力波的产生和传播机理,启动时张力在胶带中的分布并不均匀,张力波的传播和叠加将引起长距离输送胶带机的剧烈振荡。为抑制张力波及其有害传播,必须对胶带机运行动态过程进行分析,优化控制方式。因此在启动前设置一个低速预张紧过程,使得胶带机内部的张力分布基本均匀后再按S形曲线加速启动。通过控制工作张力和起制动加速度,优化选型胶带机运行安全系数,延长胶带机使用寿命。
2.4 采用双网冗余、双网环形自愈总线方案
由于距离长、分站多的现场环境,整个控制系统配置为一主站多扩展的总线结构。主站采用性能可靠的S7400冗余控制器,分站采用ET200和单模光纤连接,整个系统总线分为A、B双网,A、B网相互冗余,利用光纤链路模块的特点在光口传输上形成环,从而间接实现Profibus的环形自愈功能。利用Y耦合器将双网变为单网,方便分站传动设备及其它通讯设备的接入。使用总线桥(协议转换)扩展系统的总线结构,通讯连接第三方设备既可节约电缆的使用又可减少大功率变频器带来的干扰,保证了控制系统的可靠性。双网冗余环形自愈网络的应用解决了长距离、多区段控制的断网失控现象,保证了系统的稳定运行。
2.5 视频监控介入胶带控制
视频监控及环境监测介入胶带控制,通过画面的帧别及环境监测的数据判断事故,视频中发现异常时触发控制系统采取相应的措施。胶带机机头机尾部分均设置了监控点,根据监控点的位置及运行状态,利用监控软件分析,当画面出现已设置的异常情况时会输出报警,利用该输出点发停机令或给调度监控发报警信号。同时切换镜头拉伸至事发位置,方便事故分析及采取相应的措施,预防事故的发生,做好事故的排查。
2.6 各监测监控系统局部组网整体共网
矿井环境监测系统不是单独组网而是与通信、视频监控、电力监控通过环形以太网的方式集成共网,在后台统一监控调度。各变电站及电磁站采用LC2000通讯管理机将电力仪表及综保装置并入监控网络,同时环境监测仪表通过就近的信号采集装置并入监控网络,最后以光口的形式接入总网形成环,实现各系统局部组网整体共网的结构。
2.7 利用软件实现数据分析归类
利用后台管理软件实现控制与监控的集合,采用数据管理服务器将所有数据进行集成存储,监控终端通过服务器读取数据,监控管理整个运输系统,对环境和电力指标进行实时筛选形成趋势及报表;将事故原因分析、运行成本以及数据上传发布,数据按要求形成报表及趋势,实现胶带运输及监控的数字化。
2.8 用存储服务器集中存储各系统的数据
分类统计、集中管理、实现调度的分级管理、数据的网络上传。
3 实现过程
3.1 驱动系统
电气传动方案为超长距离胶带机分段驱动方案。根据超长距离胶带机的地理形势,胶带机被分为上运区段、平运区段、下运区段3种运行区段,电气传动系统的合理配置,优化了系统运行方案,节约了控制系统成本。PWM整流四象限变频器,能将胶带重载下行过程所产生的电能回馈给电网,有效节约电能损耗。
在选择变频器的配置时,针对不同的运行模式,采用模块化组合方式,配置不同的整流单元,可实现各种控制电机的驱动控制。整流单元作为变频器的输入前级,为中间回路提供直流电源,针对不同的应用,提供各种性能的整流装置。变频器可选择基本整流单元和有源整流单元。逆变单元的形式是三相PWM逆变器,不同功能变频器的逆变单元并无区别。图1所示为配置基本整流单元的变频器;图2所示为配置有源整流单元的变频器。
基本整流单元只为单纯整流运行设计,为三相二极管整流桥,不能将能量反馈给电网。如果制动时产生过高的再生能量,则必须通过制动模块和制动电阻转换为热量耗散掉。
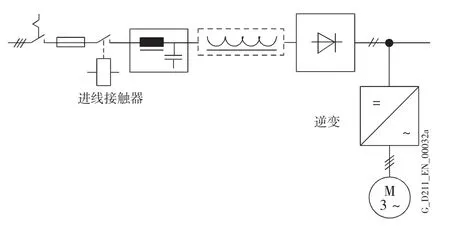
图1 配置基本整流单元的变频器
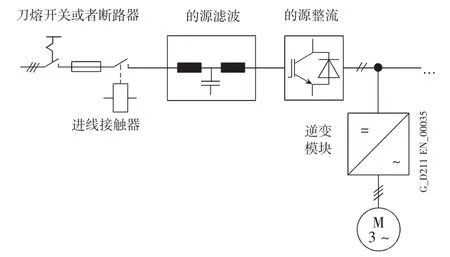
图2 配置有源整流单元的变频器
有源整流单元为三相PWM整流桥,可以整流供电并能将能量反馈给电网。和基本整流单元相比,有源整流会产生一个可控制的直流电压,无论进线电压怎样变化,这个直流电压会在电源电压允许的波动范围内保持一个稳定值。有源整流单元和有源滤波单元配套使用,在电源侧产生实际电流的效果接近正弦波,有效地抑制了有害的谐波。有源整流运行所需要的组件都集成在有源整流单元中。
上运、平运胶带机和其他辅助设备电机驱动设备选用配置基本整流单元的变频器,下运胶带机选用配置有源整流单元的变频器。
3.2 优化的速度及加速度驱动模型
图3为胶带输送机基本工艺图。单条胶带输送机主要包括以下组成部分:胶带、驱动电动机和驱动装置、驱动滚筒和减速机、托辊机架、张紧装置、制动装置、控制及保护装置等设备。
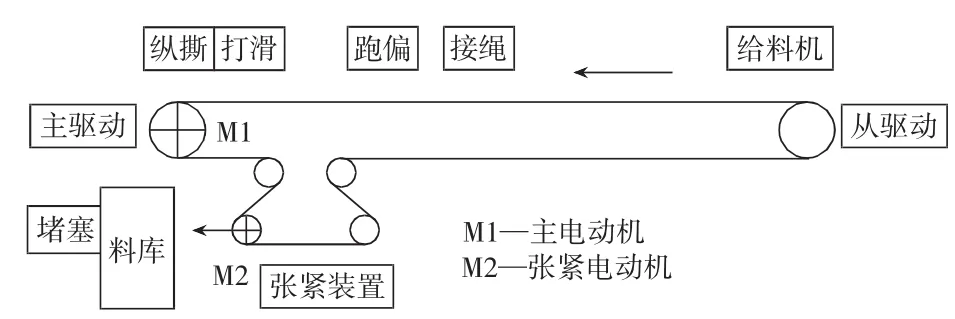
图3 胶带输送机基本工艺图
由于输送带由弹性单元组成,胶带输送机为柔粘性力学系统,具有明显的运动力学特征,在启动加速、停车减速及张力变化过程中均呈现出复杂的运动力学特征,主要表现为横向振动、纵向振动以及动态张力波在胶带中的传播和叠加,会造成输送系统的不稳定,具体表现为胶带断裂、机械损害、叠带、撒料、局部谐振跳带等。为了抑制张力波及其有害传播,保证输送机安全稳定运行,必须对胶带输送机动态过程进行分析和控制,这不仅可以使胶带机在优化的工况下安全运行,保障生产,有效延长其使用寿命,还可以通过控制工作张力和起制动加速度,优化选型胶带安全系数,节省设备投资。
由于驱动设备直接影响胶带输送机的整机性能,属于胶带输送机的关键设备。此前在带式输送机工程设计中,一般使用调速型液力耦合器等机械和液压方式的驱动设备,有效率低、维护复杂、工作环境差、不能调速运行、非线性、起动电流大等缺点,而且由于起动加速度较大,会导致胶带持续波动,张力特性较差,无法对长距离输送的动态优化和起动安全提供有效的保证,传统胶带运行张力示意如图4所示,显示张力动态特性很差。为了改善胶带张力和动态性能,可以利用优化的“S”型曲线数学模型,并通过速度闭环控制来实现.
胶带输送机负载情况比较复杂,阻力矩的组成因素较多,静态阻力、运行阻力和各种附加阻力的存在,使得理论计算十分困难,总体上表现为电动机转子轴上的恒力矩负载,包括各种阻力和转动惯量。静态阻力的存在使得驱动系统必须克服较大的静摩擦阻力才能启动,因此需要较大的启动力矩。
图5所示为优化“S”曲线的速度、加速度模型。图中速度曲线①相应的加速度曲线为曲线②,曲线③为正常停车“S”曲线,曲线④为自然停车曲线。
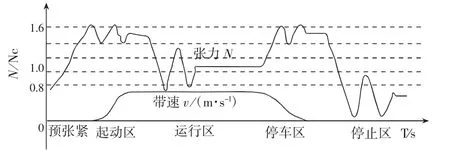
图4 传统胶带运行张力示意图
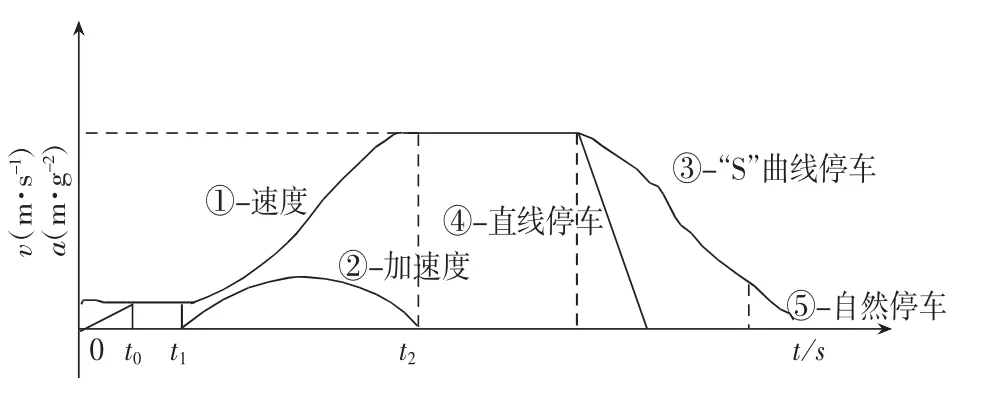
图5 优化“S”曲线的速度、加速度模型
该模型适用于需要优化运行的长距离胶带输送机驱动,设计要求特殊启动曲线。但由于启动时间较长,并要求低速性能好,所以应选用髙性能的调速驱动方式。采用速度闭环矢量控制方式,可获得全速度范围的髙精度调速性能及动态性能,并具有极佳的低速性能,可实现优化“S”速度曲线的跟随性能。同时多机驱动应采用适当的速度跟随控制策略,以获得理想的速度同步和功率平衡效果。
3.3 零速转矩功能的应用
重载启动时,变频器使能并给定零转速,四象限运行变频电机产生的电磁转矩克服负载转矩,即零速转矩,胶带机处于静止状态。此时缓慢打开抱闸,待抱闸完全打开后,再按程序设定的S型速度曲线逐级加速度给定至设定值。零速转矩功能有效防止了胶带机重载起动时的溜车现象,提高了安全性。胶带机停机时,传动系统与制动系统有机配合。当停机指令发出后,传动系统先采用电气制动方式,将带速降至低速(5%额定速度)以下时,控制系统向制动器发出柔性制动命令,同时传动系统去使能,输出零转矩,制动器开始缓慢抱闸,实现平稳抱闸停车。避免了高速停车对机械部件的冲击,降低了对制动闸瓦的磨损。
3.4 双网冗余、双网环形自愈的总线设计
根据距离长、分站多的现场环境,整个控制系统配置为一主站多扩展的总线结构,主站采用性能可靠的S7-400冗余控制器,分站采用ET-200和光纤链路模块进行扩展,采用单模光纤连接,整个系统总线分为A、B双网,A、B网相互冗余,利用光纤链路模块的特点在光口传输上形成环,从而间接实现Profibus的环形自愈功能。利用Y-耦合器将双网变为单网,方便分站传动设备及其它通讯设备的接入。使用总线桥(协议转换)扩展系统的总线结构,通讯连接用第三方设备既节约电缆的使用又减少了大功率变频器带来的干扰,保证了控制系统的可靠性;
A/B网与Y-Link的连接从网络结构上让整个系统又划分为两层网络,ET200与Y-Link属于环形的第一层DP网络,Y-Link连接的设备又属于第二层PA总线网络,采用DP/PA Link硬件组态只需要组态DP Link,DP总线速率不受PA总线的影响,最大可以达到12Mbps,PA总线中PA设备的组态地址可以和DP总线中的DP设备的组态地址重叠,第一层网络最多可组态32个DP设备,而每个YLink又可以最多组态32个PA设备,从而增加了系统的可控容量。系统网络拓扑结构如图6所示。
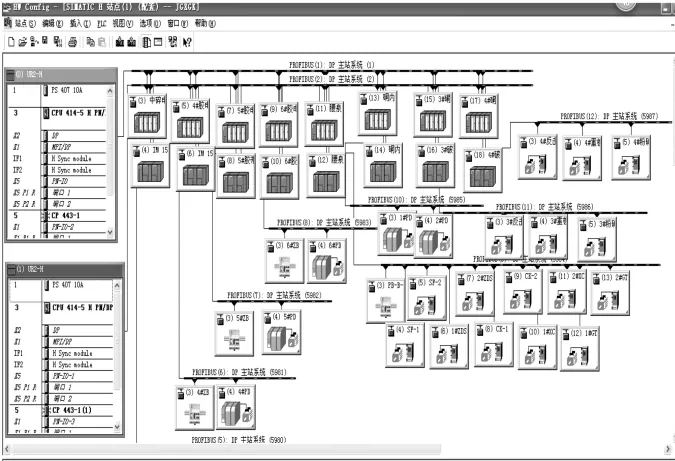
图6 系统网络拓扑图
3.5 数字化矿山调度系统的实现
集控调度工作是矿山信息化的一个重要因素,集控调度根据作用又分为胶带生产运输调度、安全及监测调度、电能管理调度以及通信语音调度,胶带运输综合控制系统的调度级别按照中控集中调度、分级调度的方式,调度结构如图7所示。
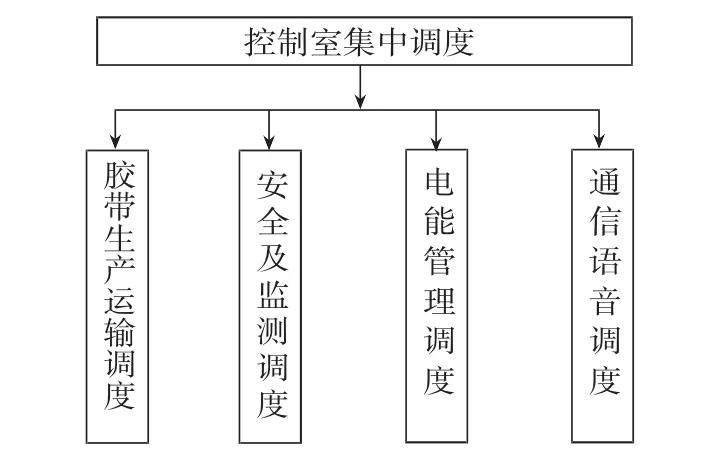
图7 调度结构示意图
其中胶带生产运输调度主要负责设备的控制,包括设备的管理、工业电视监控系统、仪器仪表的检测等。安全监测调度主要负责矿内环境的检测及测量仪表的维护,为控制室提供可靠有用的数据。电能管理调度主要负责协调动力能源、各电磁站电能消耗的统计以及设备的用电与厂区电能调度的联系。通信语音调度负责厂区电话信号覆盖及全厂电话内网的管理,控制室集控调度可通过不同的操作画面对以上系统做出调度指令,在特定情况下,下放调度权限让负责该系统的维护站来执行调度功能。
4 结束语
该系统在某矿应用的运行效果证明,超长距离胶带运输综合控制系统其性能已经达到设计要求。性能先进、可靠性高、运行稳定、操作简单方便,得到了用户的好评。本套超长距离、分段驱动胶带运输控制系统以数据存储服务器为基础,C/S结构的访问模式,采用Profibus-DP为现场控制总线网络,利用光纤传输,在光链路上实现通讯总线的双网冗余、双网环形自愈功能;驱动控制部分利用地势的分段分别采用PWM四象限变频驱动与两象限变频驱动结合的全线驱动方式,利用四象限变频器的零速转矩功能结合制动装置实现下行胶带的柔性控制;结合工业电视监控和矿井环境监测的数据综合控制胶带系统,采用分级的调度管理。系统设计配置性能高、运行稳定。系统采用高海拔设计、模式化控制等新型控制技术,自动化程度高、调节跟随响应快,符合国家两化融合和数字化矿山的标准。
[1]吴立新.数字矿山技术[M].中南大学出版社.
[2]西门子(中国)有限公司自动化与驱动集团.西门子S120调试指南.北京航空航天大学出版社.
[3]崔 坚.西门子工业网络通讯指南[M].机械工业出版社,
[4]王懿喆.胶带运输机集控系统在矿山的应用.2010全国采矿科学技术高峰论坛.
[5]贺耀宜,武 钰.工矿自动化,2014.
[6]徐学耘.长距离胶带输送机的使用和发展[J].电站施工机械,1981,(1).
Research on integration of mine digitalization and informationization based on ultra-long distance downward belt control
ZHAO Hai-jun1,2
(1.Tianshui Electric Drive Research Institute Co.,Ltd.,Tianshui 741020,China;2.State Key Laboratory of Large Electric Drive System and Equipment Technology,Tianshui 741020,China)
Aiming at the construction of the mine belt conveying system with ultra-long distance,high drop and subsection control,also based on the integration of the mine industrial video monitoring system,the mine environmental monitoring system,the six of mine safety systems,the mine power monitoring system,the mine energy management system and the mine dispatching management system,the schemes and process for realizing the whole mine digitalization and informationization are presented.It is discussed emphatically that the construction scheme of the long-distance high-drop belt transmission and automation system in large mines.According to the characteristics of the belt conveying and transportation,the scheme has many advantages and advanced functions such as the Type S speed acceleration adjustment,the ultra-long distance dual-redundancy bus communication,the double-ring selfhealing's bus structure,the mine data centralized storage,the hierarchical dispatching management etc.,and which provide successful construction schemes and solutions for those similar constructions systems.
ultra-long distance;high drop;subsection control;bus dual redundancy;ring self-healing;Type S velocity acceleration adjustment;data centralized storage;hierarchical dispatching management
TD67
A
1005—7277(2017)03—0024—06
赵海军(1984-),男,工程师,主要从事电气传动和自动化技术及系统的设计与研究工作。
2017-01-21
