锚点耦合式双质量块音叉微机械陀螺的结构设计与振动分析
2017-11-30张亚平刘海鹏管延伟
张亚平, 刘海鹏, 管延伟
(北京理工大学 爆炸科学与技术国家重点实验室, 北京 100081)
锚点耦合式双质量块音叉微机械陀螺的结构设计与振动分析
张亚平, 刘海鹏, 管延伟
(北京理工大学 爆炸科学与技术国家重点实验室, 北京 100081)
设计了锚点耦合式双质量块音叉微机械陀螺,分析了结构的模态顺序与振动灵敏度特性。所设计的结构驱动方向采用反平行杠杆机制,检测方向使用四根线弹性梁连接的锚点耦合圆环梁,实现了驱动方向和检测方向模态顺序的优化,其检测方向的同相频率比反相频率提高了30%。建立了音叉式陀螺的二阶振动微分方程,利用坐标变换法得出锚点耦合式比传统耦合式结构的反相和同相振动输出分别降低了74.8% 与 88.0%,并进行了Ansys仿真分析验证。在不牺牲陀螺灵敏度的前提下,锚点耦合式双质量块音叉微机械陀螺能够很好地实现模态优化和大幅降低振动输出误差。
锚点耦合式; 音叉式微机械陀螺; 模态优化; 振动灵敏度; 坐标变换法
微机械陀螺发展迅速,已广泛应用于电子行业,汽车,惯性导航等领域,这得益于其体积小,成本低,能耗小以及可批量生产。微陀螺的工作原理是基于哥氏效应,其驱动方向可以看作为谐振器,检测方向为加速度计,两者均需要敏感位移的变化量[1-3]。因此,任何影响位移变化的物理量尤其是陀螺的振动环境,都会对陀螺的输出产生影响。随着陀螺性能(分辨率、灵敏度、带宽)的不断提高,振动对陀螺性能的影响愈发明显[4-6]。为此,研究人员设计了各种双质量块音叉式陀螺来消除振动的影响,其结构形式基本为直接耦合式的音叉式陀螺。Yoon等[7]基于理想对称音叉式结构提出了振动引起的加速度灵敏度的三种误差源。Singh等[8-9]对音叉式陀螺进行了刚度不对称引起的加速度响应仿真分析和实验研究,得出提高解耦频率比可以降低加速度灵敏度。Guan等[10]对刚度不对称音叉式陀螺进行了相关的理论与仿真分析,从理论层面阐释了提高耦合刚度比和反相频率可以降低加速度对陀螺的影响。然而,提高耦合刚度比和反相频率,会明显降低微陀螺的灵敏度。因此,设计一种结构既能抑制振动的影响,又能不降低陀螺的刻度因子,具有重要的指导意义。
本文基于上述分析,首先设计了锚点耦合式微机械音叉式陀螺,然后通过坐标变换法对锚点耦合式音叉陀螺的振动输出进行了理论计算,利用有限元仿真模拟来分析结构的模态优化和振动灵敏度,最后对理论结果进行了验证。
1 结构设计
音叉式微机械陀螺由左右两个质量块组成,在驱动方向上两质量块作反相运动,当外界有角速度,两质量块会受到哥氏力的作用,致使在检测方向也作反相运动,通过左右两质量块检测电容的差分输出来敏感外界角速度的大小。
由于传统音叉式陀螺的双质量块是通过弹性梁直接耦合的,使同相模态频率小于反相工作模态频率。理想音叉式结构理论上可以消除外界共模振动产生的影响,但由于实际加工工艺的缺陷,使左右质量块的质量、刚度和阻尼不完全对称,振动导致左右质量块运动不再完全同步,甚至在工作频率处出现反相运动,从而产生振动输出误差。
为了解决传统音叉式结构线耦合方向的模态优化和易受到外界振动影响的问题,在线耦合方向没有采用直接耦合的形式,而是采用了锚点耦合圆环梁的形式。A类结构使用了锚点固定的四根高线性度的折叠梁来连接圆环结构,如图1所示。而B类结构只使用了圆环结构直接进行耦合,如图2所示。这两种类型结构对称,每个叉都是由一个质量块,两个驱动模态和两个检测模态的框架组成,通过弹性梁与基底相连并固定在xy平面内。这些对称梁可以改善驱动模态和检测模态的模态匹配并抑制由温度引起的谐振频率漂移。驱动检测电极均为顺向梳齿电容以保证线性度。x轴方向为检测方向,y轴方向为驱动方向。对所设计的两类结构进行了对比研究。

图1 锚点耦合式音叉式陀螺结构示意图

图2 直接耦合式音叉式陀螺结构示意图
通过对A类和B类音叉式陀螺进行模态仿真发现,两者反相频率基本一致,A类音叉式陀螺通过锚点耦合圆环梁结构,使检测同相频率相比于反相频率提高了约30%,从而实现了检测模态的模态优化。
2 振动输出理论分析
首先分析传统直接耦合式音叉式陀螺的动力学方程,其非理想结构的两自由度振动模型如图3所示,音叉式陀螺的动力学方程为:

图3 非理想音叉式陀螺两自由度模型
左质量块:

(1)
右质量块:

(2)
式(1)减去式(2)得,

(3)
式(1)加上式(2)得,

(4)
因为考虑的是同相和反相的情况,以x1+x2,x1-x2为参考坐标系进行坐标变换,
xin=x1+x2,xan=x1-x2
(5)
将式(5)代入式(3)和式(4)得到:
(6)

解出系统的固有频率:
(7)
通过模态叠加法,可以得出系统的稳态输出响应。
当w=w1时,
xan(t)=

(8)
这里kan=k1+k2+4k′,kin=k1+k2,考虑到实际情况,kan-kin>>Δk,并利用泰勒级数展开得,

所以式(8)可以写为:

(9)
当w=w2时,
xan(t)=

(10)
考虑到实际情况,kin-kan>>Δk,由泰勒级数展开得,

所以式(10)可以写为:

(11)

(12)
(13)

根据无量纲数ε,η的定义,得到音叉式结构的振动输出,
(14)
(15)
从上面的式(14)和式(15)可以看出,无论同相模态频率处还是反相模态频率处,音叉式陀螺(无论是直接耦合式还是锚点耦合式结构)的反相振动输出都与ε成正比,与η成反比。
3 仿真分析
3.1刚度差比分析
首先分析了A类、B类音叉式陀螺的刚度差比,分别用ηa,ηb来表示。根据刚度差比的定义,
(16)
由式(16)可以看出,刚度差只取决于耦合弹性梁的刚度。对于锚点耦合式音叉式陀螺,是同相与反相耦合梁的刚度差。对于直接耦合式音叉式陀螺,是耦合弹性梁的刚度。对两种耦合弹性梁进行了刚度仿真,仿真时,通过施加1uN的力,观察产生的位移,以此来计算弹性梁的刚度。锚点耦合式反相模态下耦合梁的刚度如图4所示,同相模态下耦合梁的刚度如图5所示。

图4 反相模态锚点耦合梁刚度
(17)
将式(17)代入式(16)得:

(18)
直接耦合式反相模态下耦合梁的刚度如图6所示。
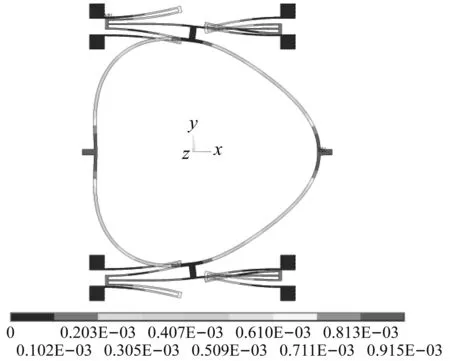
图5 同相模态锚点耦合梁刚度

图6 反相模态直接耦合梁刚度
(19)
将式(19)代入式(16)得:

(20)
由式(18)和式(20)可得,

由以上的仿真分析可以看出锚点耦合式微机械音叉式陀螺比直接耦合式的刚度差比大3.81倍,因此锚点耦合式结构可以大大提高刚度差比。
3.2振动灵敏度仿真分析
对所设计的两类结构分别进行了共模加速度谐响应仿真分析,中间敏感质量块单元使用四面体网格划分,弹性梁使用尺寸很小的六面体网格,对于框架使用尺寸较大的六面体网格。假设外界加速度为1 g,检测模态品质因子Q为100,A类结构从4 000到7 000 Hz进行扫频,B类结构从3 000到5 000 Hz进行扫频。具体结构仿真参数如表1所示,所有设计结构的同相反相模态频率如表2所示。
在音叉式结构完全对称的情况下,振动产生的影响通过差分输出会完全消掉。然而考虑到实际加工工艺的限制,不可避免出现结构的缺陷,特别是刚度不对称导致的振动输出。因此分别研究了A类、B类结构在刚度不对称程度为1.0%情况下的振动响应。
从图7中可以看出A类结构的振动输出误差要明显小于B类结构,尽管A类结构和B类结构的反相频率基本一样,A类的反相振动输出远小于B类的反相振动输出,同时同相振动输出比B类的同相输出更小,从而说明A类结构抵抗振动的性能比B类要好。

表1 结构仿真参数

表2 所有结构的同相反相模态频率

图7 1.0%刚度不对称结构的位移差
从图8中可以得到A类、B类结构在反相模态频率处都会出现反相运动。为了说明不同刚度对称程度下结构的振动输出,又对1.8%的情形进行了仿真分析。从图9和图10中可以看出,不对称程度越大,对振动输出的影响越大,位移差越大,反相运动越明显。

图8 1.0%刚度不对称结构的相位差
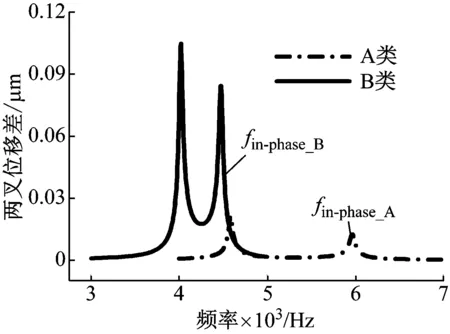
图9 1.8%刚度不对称结构的位移差

图10 1.8%刚度不对称结构的相位差
3.3振动输出理论与仿真对比
音叉式陀螺左右两叉的位移差可以通过式(14)和式(15)进行计算,并与仿真分析进行对比,如表3所示。通过表3可以看出,理论计算值与仿真结果基本一致,从而验证了理论计算模型的正确性。由此可以得到,两叉的位移差与刚度差比成反比,与刚度不对称程度成正比。
同时对此两类音叉式陀螺位移差的理论值进行了对比,如表4所示。从表4中可以看出,A型结构比B型结构振动输出在反相模态频率处降低了74.8%,在同相模态频率处降低了88.0%。此外,更大的刚度不对称程度会导致更大的振动输出。因此,锚点耦合式微机械音叉式陀螺比直接耦合式的振动输出小得多,这是由锚点耦合式具有较大的同相反相刚度差比所决定的。

表3 仿真与理论对比

表4 两类结构位移差对比
4 结 论
设计了锚点耦合式双质量块微机械音叉式陀螺,分析了结构的模态优化和振动对音叉式陀螺的输出影响。通过模态仿真分析得到,检测同相模态频率比反相模态频率提高了约30%左右,比传统直接耦合式结构提高了48.6%,而反相频率略微增加。利用坐标变换法对锚点耦合式音叉式陀螺的振动输出进行了理论建模与计算,并通过Ansys进行了仿真分析验证。分析结果发现,在共模振动作用下锚点耦合式音叉式陀螺比直接耦合式音叉式陀螺,在反相模态频率处振动输出降低了74.8%,在同相模态频率处振动输出降低了88.0%。因此,所设计的锚点耦合式双质量块微机械音叉式陀螺,在不牺牲陀螺灵敏度的前提下,既能实现模态优化,又能显著降低振动输出。
[1] 文永蓬,尚慧琳. 微陀螺动力学建模与非线性分析[J].振动与冲击, 2015, 34(4):69-74.
WEN Yongpeng, SHANG Huilin. Dynamic modeling and nonlinear analysis for a microgyroscope[J]. Journal of Vibration and Shock, 2015, 34(4):69-74.
[2] 曹慧亮,李宏生,王寿荣,等. MEMS陀螺仪结构模型及系统仿真[J].中国惯性技术学报, 2013, 21(4):524-529.
CAO Huiliang, LI Hongsheng, WANG Shourong, et al. Structure model and system simulation of MEMS gyroscope[J]. Journal of Chinese Inertial Technology, 2013, 21(4):524-529.
[3] SHKEL A M. Type I and type II micromachined vibratory gyroscopes. In: proceedings position location and navigation symposium (PLANS)[C]. San Diego, 2006:586-593.
[4] PRIKHODKO I P, ZOTOV S A, TRUSOV A A, et al. Foucault pendulum on a chip: Rate integrating silicon MEMS gyroscope[J]. Sens Actuator A: Phys, 2012, 177:67-78.
[5] CHO J, GREGORY J, NAJAFI K. High-Q, 3 kHz single-crystal silicon cylindrical rate-integrating gyro (CING)[C]. Proceedings MEMS, Paris, 2012:172-175.
[6] TRUSOV A A, SCHOFIELD A R, SHKEL A M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering[J]. Sens Actuator A: Phys, 2011, 165(1):26-34.
[7] YOON S W, LEE S, NAJAFI K. Vibration-induced errors in MEMS tuning fork gyroscopes[J]. Sens Actuator A: Phys, 2012, 180:32-44.
[8] SINGH T P, SUGANO K, TSUCHIYA T, et al. Frequency response of in-plane coupled resonators for investigating the acceleration sensitivity of MEMS tuning fork gyroscopes[J]. Microsyst Technol, 2012, 18(6):797-803.
[9] SINGH T P, SUGANO K, TSUCHIYA T, et al. Experimental verification of frequency decoupling effect on acceleration sensitivity in tuning fork gyroscopes using in-plane coupled resonators[J]. Microsyst Technol, 2013, 20(3):403-411.
[10] GUAN Y W, GAO S Q, LIU H P, et al. Acceleration sensitivity of tuning fork gyroscopes:theoretical model, simulation and experimental verification[J]. Microsyst Technol, 2015, 21(6): 1313-1323.
Designandvibrationanalysisofamicromachinedtuningforkgyroscopewithanchoredcouplingmechanism
ZHANGYaping,LIUHaipeng,GUANYanwei
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
A micro-electro-mechanical system (MEMS) tuning fork gyroscope (TFG) with anchored coupling mechanism was designed and its mode ordering and vibration sensitivity were investigated. The proposed TFG prioritizes the anti-phase drive-mode using a levered mechanism while the sense-mode is prioritized using an anchored coupling ring spring linked by four linear beams to improve the mode ordering. The in-phase frequency of the anchored coupling TFG is improved by 30% than the anti-phase frequency in the sense direction. The second order vibration differential equation of the tuning fork gyroscope was established and solved by using the coordinate transformation method. The simulations and analytical results demonstrate that the vibration output is reduced by 74.8 and 88.0% in the anti-phase mode and in-phase mode frequencies, respectively. The anchored coupling TFG can improve the mode ordering and greatly suppress the vibration output.
anchored coupling mechanism; tuning fork gyroscope; mode ordering; vibration sensitivity; coordinate transformation method
O327
A
10.13465/j.cnki.jvs.2017.21.034
国家高技术研究发展计划(863计划)(2013AA041104)
2016-12-31 修改稿收到日期:2017-07-09
张亚平 女,硕士生,1993年1月
刘海鹏 男,博士,副教授,1973年8月