结合旋转域极化特征的极化SAR地物分类
2017-11-27陶臣嵩陈思伟李永祯肖顺平
陶臣嵩 陈思伟 李永祯 肖顺平
(国防科学技术大学电子科学与工程学院电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
结合旋转域极化特征的极化SAR地物分类
陶臣嵩 陈思伟*李永祯 肖顺平
(国防科学技术大学电子科学与工程学院电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
地物分类是极化合成孔径雷达(SAR)图像理解与解译的重要应用方向。利用H/A/α/SPAN等旋转不变特征参数的极化SAR地物分类是一种常用的分类方法。然而,目标的后向散射响应与其方位取向等姿态密切相关,极易引起散射机理的解译模糊,也限制了仅使用旋转不变特征参数作为分类特征集的极化SAR地物分类方法的精度。针对这一问题,有文献提出了在绕雷达视线的旋转域中解译目标散射特性的统一的极化矩阵旋转理论,并导出了一系列旋转域极化特征,刻画目标旋转域隐含信息。基于该理论,该文将旋转域极化特征用于极化SAR地物辨识与分类,并发展了一种结合旋转域极化特征与旋转不变特征H/A/α/SPAN的极化SAR地物分类方法。该方法将优选的旋转域极化特征参数和H/A/α/SPAN作为支持向量机(SVM)分类器的输入,利用两类特征对不同地物类别区分辨识能力的互补,以达到更好的分类性能。对AIRSAR和UAVSAR实测数据的对比实验表明,相较于仅以H/A/α/SPAN作为SVM分类器输入的传统方法,该方法得到更好的分类精度和稳健性。其中,对于AIRSAR数据十五类地物的分类,该方法总体分类精度达到92.3%,优于传统方法的91.1%。此外,对于多时相UAVSAR数据七类地物的分类,该方法平均总体分类精度达到95.72%,显著优于传统方法的87.80%,验证了该方法对多时相数据的稳健性。该文研究进一步证实了通过深入挖掘旋转域中目标极化散射信息能够为极化SAR图像的解译与应用提供新的可行途径。
极化合成孔径雷达;极化特征;旋转域;支持向量机;地物分类
1 引言
极化合成孔径雷达(Polarimetric Synthetic Aperture Radar, PolSAR)具有全天时和几乎全天候的工作能力,通过收发极化状态正交的电磁波以获取目标的全极化散射信息[1]。地物分类是农作物生长监控、农村与城市用地普查、环境监测等应用领域的共性基础问题,也是极化SAR图像理解与解译的重要应用方向。高精度的地物分类结果能够为上述应用领域提供可靠的信息支撑。
通常,提高极化SAR地物分类精度主要有两种途径[2]。第1种途径专注于极化特征的挖掘与优选,通过精细化的极化散射机理建模与解译,从全极化信息中提取出对不同地物类别具有更强区分度的特征。常用的极化散射机理解译方法有基于特征值分解的方法和基于模型分解的方法。基于这些极化目标分解方法所得到的极化特征参数经常被用于极化SAR地物分类,例如Cloude-Pottier分解所得的极化熵/极化平均角/极化反熵(H//A)参数[3],Freeman-Durden分解[4]、Yamaguchi分解[5]和近年来提出的精细化极化目标分解[6]所得的各散射机理的散射能量参数(如奇次散射、偶次散射、体散射、螺旋散射等)[7]。第2种途径则从分类器入手,使用性能更好的分类器,以对现有的极化特征进行充分利用。常用的分类器包括C均值分类器、Wishart分类器、支持向量机(Support Vector Machine, SVM)分类器、随机森林分类器、神经网络分类器以及近来年在诸多领域取得成功应用的以卷积神经网络为代表的深度学习分类方法等[8–11]。当然,对特征和分类器同时进行优化和优选也是提高极化SAR地物分类精度的有效途径。
在传统基于特征的极化SAR地物分类中,具有旋转不变特性的极化特征参数得到了广泛应用。例如,基于H//A和总散射能量SPAN的极化SAR地物分类就是一种常用的分类方法。然而,目标的极化响应与目标和SAR的相对几何关系密切相关。同一目标在不同方位取向下,其后向散射可以是显著不同的。同时,不同目标在某些特定方位取向下,其后向散射又是十分相似的。例如,具有不同方位取向的建筑物与森林等植被就是极化SAR图像解译的难点。这是诸多传统极化目标分解方法存在散射机理解译模糊的重要原因之一,同时也限制了基于旋转不变极化特征参数的传统分类方法所得精度的进一步提升。为避免这种解译模糊,一种思路是构建更精细化的目标散射模型和精细化的极化目标分解方法。而另一种思路则是挖掘利用目标方位取向与其后向散射机理之间的隐含关系。文献[12]提出的统一的极化矩阵旋转理论就是一种代表性的方法。该方法提出了在绕雷达视线的旋转域中理解目标散射特性的新思路,并导出了一系列旋转域极化特征。部分旋转域极化特征参数已经在农作物辨识[13]、目标对比增强[12]、人造目标提取[14]等领域获得了成功应用。
由于这些旋转域极化特征包含有目标在旋转域中隐含的极化散射信息,且与其方位取向具有一定关系。若将它们与传统的旋转不变极化特征参数于联合作为地物分类特征集,则从极化特征挖掘的角度来看,两类不同的极化特征对于不同地物类别的区分能力势必会形成一定程度的互补,进而使分类精度得到进一步提升。基于这一思路,本文提出了一种结合旋转域极化特征与旋转不变特征的极化SAR地物分类方法。具体即基于不同地物类别样本集类间距最大的特征优选准则,以部分优选的旋转域极化特征参数与联合作为地物分类所用特征,并选用性能较为稳定的SVM[15]作为分类器进行分类处理。由于该分类方法额外使用了目标在方位取向方面的隐含信息,故相较于仅使用旋转不变特征作为输入的SVM分类器[10],其能够达到更优的分类性能表现。
本文第2节简要介绍了统一的极化矩阵旋转理论及其所导出的旋转域极化特征参数;第3节提出结合旋转域极化特征的极化SAR地物分类方法;第4节基于AIRSAR和多时相UAVSAR实测数据开展了地物分类对比实验及分析;第5节总结本文方法并对后续研究工作进行展望。
2 统一的极化矩阵旋转理论
极化SAR获得的目标全极化信息可以通过极化相干矩阵T表示。满足互易性原理时,极化相干矩阵T可以表示为:

其中,旋转矩阵为:


其中,A为振荡幅度,B为振荡中心,为角频率,θ0为初始角度。文献[12]将这4类极化特征参数称为振荡参数集,其完整表征极化相干矩阵的各元素在旋转域中的特性。这样就可以导出一系列旋转域极化特征参数,如表1所示。其中,Angle{a}表示复数a的相位,相应取值范围为

表1 旋转域极化特征参数[12]Tab. 1 Polarimetric feature parameters derived from rotation domain[12]
基于上述振荡参数集,文献[12]还导出了一系列的极化角参数集,如极化零角参数、极化最大化角参数以及极化最小化角参数等。其中,极化零角参数的定义为在绕雷达视线的旋转域中使极化相干矩阵某元素取值为零的旋转角,即:

3 结合旋转域极化特征的分类方法
3.1 旋转域极化特征的优选
在此之前,需要基于地物分类的应用背景对众多的旋转域极化特征进行优选处理。在文献[12]所导出的一系列旋转域极化特征之中,以不同地物类别样本集相互之间的“类间距最大化”为准则,进行相应的旋转域极化特征优选。具体步骤为:首先对各旋转域极化特征参数进行归一化处理;然后将不同的地物类别两两组合形成若干的地物类别对;接着针对各地物类别对,以其中两地物类别之间的类间距为标准,优选出使其取值达到最大的旋转域极化特征,则每个地物类别对均对应于一个优选的旋转域极化特征;最后,将各地物类别对的优选结果进行“取并集”处理,进而得到最终的优选结果。
文献[12]所导出相互独立的旋转域极化特征共有12个,分别为针对之后实验部分所使用的AIRSAR数据(15类地物,两两组合形成105个地物类别对;其它说明见4.1节)以及多时相UAVSAR数据(7类地物,两两组合形成21个地物类别对;4个数据获取日期;其它说明见4.2节),上述特征优选流程所得结果如表2所示。

表2 针对不同极化SAR实测数据的特征优选结果Tab. 2 Selected features for different PolSAR data
综合考虑表2中的优选结果,并在追求较高地物分类精度的同时,将两组实测数据优选得到的旋转域极化特征进行统一,故本文优选部分的最终结果为3个极化零角参数,即
3.2 本文分类方法
为了将目标在旋转域中的隐含信息充分利用在极化SAR地物分类中,同时又发挥传统的旋转不变极化特征参数在极化散射机理解译方面的优点,本文提出了一种结合旋转域极化特征的极化SAR地物分类方法,其流程图如图1所示,相应的具体操作如下:
(1) 在进行Cloude-Pottier分解之前,需要对极化SAR数据进行相干斑滤波处理。本文采用新近提出的一种基于矩阵相似性检验的SimiTest自适应相干斑滤波方法[16]对极化SAR数据进行滤波预处理。
(2) 基于滤波后的极化相干矩阵,计算总散射能量SPAN。
(3) 同样地,基于滤波后的极化相干矩阵,进行Cloude-Pottier分解,得到极化特征量
(4) 同时,将滤波后的极化相干矩阵绕雷达视线旋转,计算上述优选部分所得的3个极化零角参数。
(5) 对上述7个极化特征参数分别进行归一化处理,以作为地物分类特征集输入至SVM分类器。

图1 本文方法具体流程图Fig. 1 Flowchart of proposed method
(6) 通过SVM相应的训练与测试过程,实现对不同地物类别的分类处理。
4 对比实验及分析
为了验证新极化特征(即3个旋转域极化零角参数)的引入对于传统地物分类方法性能的提升作用,在对极化相干矩阵中全部极化信息进行利用的前提之下,将本文方法与仅使用旋转不变特征作为SVM分类器输入的传统方法进行对比。首先使用AIRSAR数据15类地物的分类验证本文方法的分类性能,再使用多时相UAVSAR数据7类地物的分类进一步验证本文方法对多时相数据的稳健性。在对此两组数据分别进行SimiTest相干斑滤波[16]时,所用滑窗大小均为15×15。对SVM分类器,各类地物样本的一半用于训练,另一半用于测试。
4.1 对AIRSAR数据的地物分类对比实验
本文首先使用NASA/JPL AIRSAR系统在荷兰Flevoland地区所获取的L波段全极化SAR数据进行地物分类实验。该数据方位向分辨率为12.1 m,距离向分辨率为6.6 m,所用区域大小为736×1010。SimiTest相干斑滤波后的Pauli RGB图如图2(a)所示。该区域的真值图如图2(b)所示,其中主要包含茎豆、豌豆、森林、苜蓿、小麦1、甜菜、土豆、裸地、草地、油菜籽、大麦、小麦2、小麦3、水域以及建筑物等15类地物。
使用传统方法和本文方法分别对滤波后的数据进行分类处理,所得结果如图3所示。

图2 AIRSAR数据Fig. 2 AIRSAR data
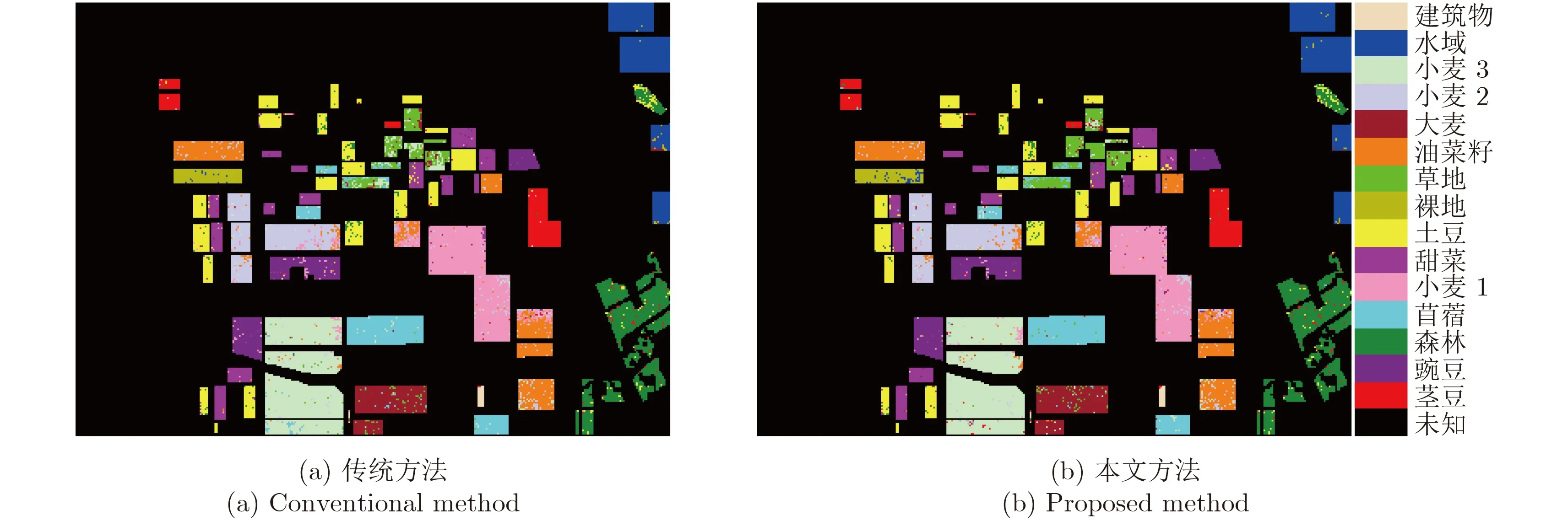
图3 AIRSAR数据的分类结果Fig. 3 Classification results of AIRSAR data
两种方法对AIRSAR数据15类地物分类处理所得精度如表3所示。通过比较可知,本文方法得到的总体分类精度为92.3%,优于传统方法91.1%的分类精度。且本文方法对草地77.3%的分类精度相较于传统方法的59.3%提升了18个百分点。另外,由于SVM分类器所用分类策略以总体分类精度的最大化为目标,无法保证单一地物类别的分类精度均达到最优。例如,本文方法在苜蓿、小麦1、裸地、大麦以及建筑物等5种地物类别区域所得分类精度均不及传统方法。针对其中分类精度差距最大(约8.3%)的裸地,由于其相应区域的主要散射机制为“面散射”,不同方位取向对其后向散射的影响较小,使用传统的旋转不变极化特征已经能较好地对其进行区分与辨识,本文方法额外引入的3个旋转域极化零角参数可能造成了分类信息的冗余,进而导致所得分类精度的较大幅度下降。
4.2 对多时相UAVSAR数据的地物分类对比实验
本文使用NASA/JPL UAVSAR系统在加拿大Manitoba地区所获取的多时相L波段全极化SAR数据进行地物分类实验。该数据方位向分辨率为7 m,距离向分辨率为5 m,所用区域大小为1325×1011。多时相极化SAR数据分别获取于6月17日、6月22日、7月3日以及7月17日。SimiTest相干斑滤波处理之后多时相极化SAR数据对应的Pauli RGB图如图4所示。该区域的主要地物类型是以谷物和油种产品为代表的混合型牧场农作物。相应的真值图如图5所示,其中主要包含阔叶林、草料、大豆、玉米、小麦、油菜籽以及燕麦等7类地物。

表3 两种方法所得AIRSAR数据15类地物及总体的分类精度(%)Tab. 3 Classification accuracy of different terrains in AIRSAR data using two methods (%)
使用传统方法和本文方法分别对滤波后的多时相极化SAR数据进行相互独立的分类处理,所得结果分别如图6和图7所示。
如图6(c)和图7(c)所示,基于7月3日获取的数据,传统方法将红色圆框内小麦与燕麦的绝大部分错分为了大豆,而本文方法在该区域的分类性能相较于前者有显著提升。又如图6(d)和图7(d)所示,基于7月17日获取的数据,传统方法将白色圆框内小麦的绝大部分错分为了大豆,而本文方法在该区域的分类精度相较于前者也有较大提升。
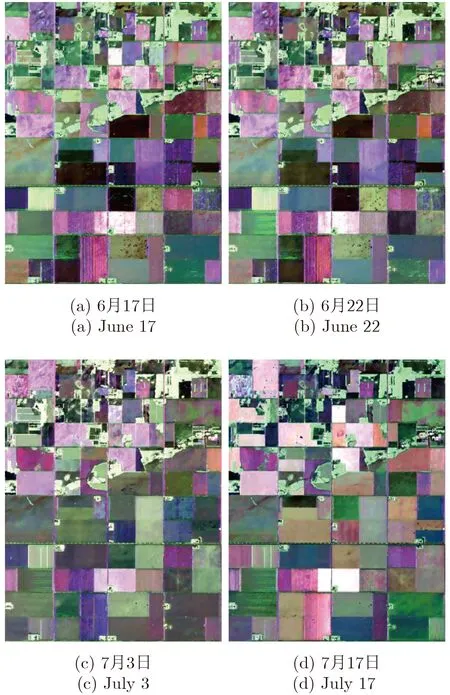
图4 多时相UAVSAR数据滤波后Pauli RGB图Fig. 4 Filtered Pauli RGB images of multi-temporal UAVSAR data

图5 所用区域的真值图Fig. 5 Gound truth of the multi-temporal data
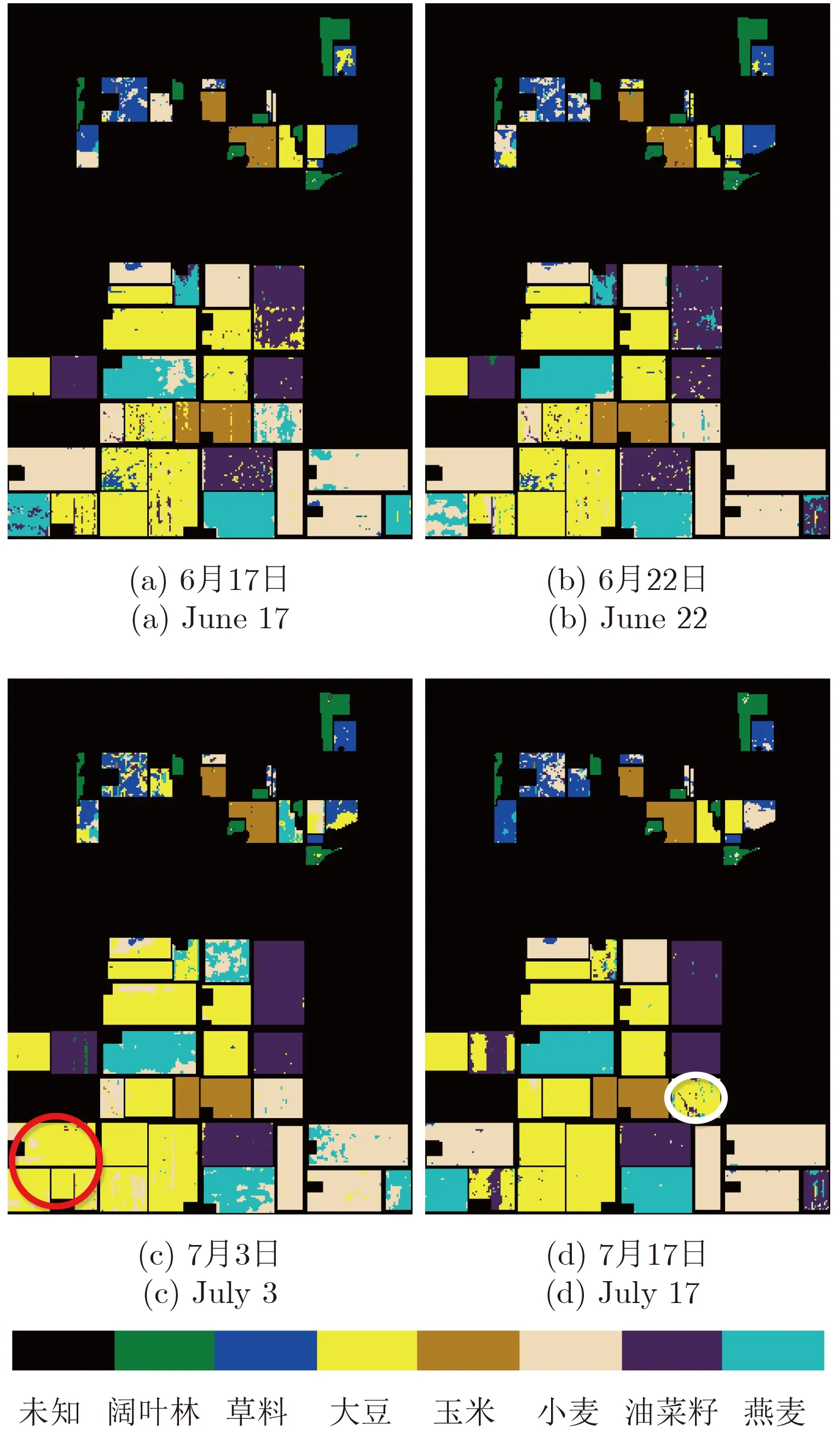
图6 传统方法对多时相UAVSAR数据分类结果Fig. 6 Classification results of multi-temporal UAVSAR data using conventional method

图7 本文方法对多时相UAVSAR数据分类结果Fig. 7 Classification results of multi-temporal UAVSAR data using proposed method
两种方法对多时相UAVSAR数据7类地物分类处理所得精度如表4所示。通过比较可知,对不同日期获取的数据,本文方法所得各类地物及总体的分类精度均优于或相当于传统方法。其中,对6月17日、6月22日、7月3日以及7月17日4个不同日期所获取的数据,本文方法得到的总体分类精度分别为94.98%, 95.12%, 95.99%以及96.78%,而传统方法所得总体分类精度则波动于80.87%至90.75%之间,出现约10%的起伏。具体就小麦和燕麦而言,本文方法得到的分类精度均分别保持在94%和92%以上,而传统方法所得相应分类精度则分别出现了约30%和23%的波动起伏。另外,本文方法95.72%的平均总体分类精度相较于传统方法的87.80%提升了约8个百分点。故本文方法较好的分类性能对于同一系统的多时相数据更具稳健性。
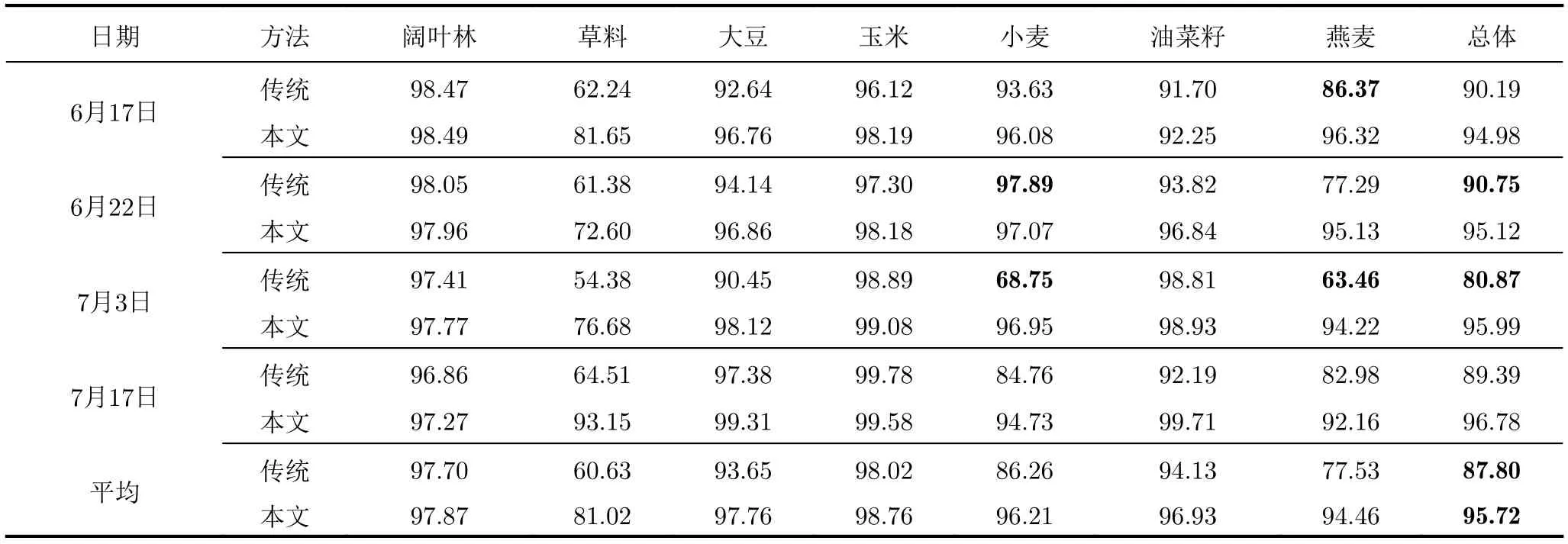
表4 两种方法所得多时相UAVSAR数据7类地物及总体的分类精度 (%)Tab. 4 The classification accuracy of different terrains in multi-temporal UAVSAR data using two methods (%)
另外,对于6月22日所获取数据中的阔叶林和小麦,以及7月17日所获取数据中的玉米,本文方法所得分类精度均略低于传统方法,且分类精度的差距均在1%以内。
在上述两组相互独立的对比实验所得结果中,本文方法所得分类精度均优于传统方法。故本文方法所表现出的较好分类性能对于不同系统的数据也具有较强稳健性。
5 结论
目标方位取向对其后向散射响应的直接影响极易引起散射机理的解译模糊,进而限制仅使用旋转不变特征参数作为分类特征集的极化SAR地物分类所得精度。针对这一问题,本文将刻画目标旋转域隐含信息的旋转域极化特征用于极化SAR地物分类,并提出了一种结合旋转域极化特征和旋转不变特征H/A//SPAN的极化SAR地物分类方法,该方法将旋转域极化零角参数和H/A//SPAN联合作为分类特征集输入至SVM分类器。
将本文方法与仅使用旋转不变特征H/A//SPAN作为SVM分类器输入的传统方法进行比较:对AIRSAR数据15类地物分类而言,本文方法总体分类精度达到92.3%,优于传统方法的91.1%。对多时相UAVSAR数据7类地物分类而言,本文方法平均总体分类精度达到95.72%,显著优于传统方法的87.80%,表明本文方法对同一系统的多时相数据更具稳健性。这两组对比实验也表明本文方法较好的分类性能对于不同系统的数据具有较强稳健性。
通过对旋转域中目标极化散射信息的深入挖掘,能够为极化SAR图像的解译与应用提供一条新的可行途径。下一步将考虑旋转域极化特征与具有深度学习能力的卷积神经网络等分类器相结合,以实现更高的分类精度。另外,对极化特征参数更优的选择准则及相互融合也是我们未来将要深入研究讨论的内容。
[1]Lee J S and Pottier E. Polarimetric Radar Imaging: From Basics to Applications[M]. Boca Raton, FL, USA, CRC Press, 2009.
[2]吴永辉, 计科峰, 郁文贤. SVM全极化SAR图像分类中的特征选择[J]. 信号处理, 2007, 23(6): 877–881.Wu Yonghui, Ji Kefeng, and Yu Wenxian. A new feature selection algorithm for SVM-based fully polarimetric SAR image classification[J].Signal Processing, 2007, 23(6):877–881.
[3]Cloude S R and Pottier E. A review of target decomposition theorems in radar polarimetry[J].IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(2): 498–518. DOI:10.1109/36.485127.
[4]Freeman A and Durden S L. A three-component scattering model for polarimetric SAR data[J].IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. DOI:10.1109/36.673687.
[5]Yamaguchi Y, Moriyama T, Ishido M,et al.. Fourcomponent scattering model for polarimetric SAR image decomposition[J].IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(8): 1699–1706. DOI: 10.1109/TGRS.2005.852084.
[6]Chen S W, Wang X S, Xiao S P,et al.. General polarimetric model-based decomposition for coherency matrix[J].IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3): 1843–1855. DOI: 10.1109/TGRS.2013.2255615.
[7]Chen S W, Li Y Z, Wang X S,et al.. Modeling and interpretation of scattering mechanisms in polarimetric synthetic aperture radar: Advances and perspectives[J].IEEE Signal Processing Magazine, 2014, 31(4): 79–89. DOI:10.1109/MSP.2014.2312099.
[8]Cloude S R and Pottier E. An entropy based classification scheme for land applications of polarimetric SARs[J].IEEE Transactions on Geoscience and Remote Sensing, 1997,35(1): 68–78. DOI: 10.1109/36.551935.
[9]Lee J S, Grunes M R, Ainsworth T L,et al.. Unsupervised classification of polarimetric SAR images by applying target decomposition and complex Wishartdistribution[J].IEEE Transactions on Geoscience and Remote Sensing, 1999,37(5): 2249–2258. DOI: 10.1109/36.789621.
[10]赵一博. 基于SVM和RBF神经网络的极化SAR图像分类方法研究[D]. [硕士论文], 国防科学技术大学, 2013.Zhao Yibo. Classification of polarimetric SAR image based on SVM and RBF neural network[D]. [Master dissertation],National University of Defense Technology, 2013.
[11]吴永辉, 计科峰, 郁文贤. 基于H-alpha和改进C-均值的全极化SAR图像非监督分类[J]. 电子与信息学报, 2007, 29(1): 30–34.Wu Yonghui, Ji Kefeng, and Yu Wenxian. Unsupervised classification of fully polarimetric SAR image using H-alpha decomposition and modified C-Mean algorithm[J].Journal of Electronics and Information Technology, 2007, 29(1):30–34.
[12]Chen S W, Wang X S, and Sato M. Uniform polarimetric matrix rotation theory and its applications[J].IEEE Transactions on Geoscience and Remote Sensing, 2014,52(8): 4756–4770. DOI: 10.1109/TGRS.2013.2284359.
[13]Chen S W, Li Y Z, and Wang X S. Crop discrimination based on polarimetric correlation coefficients optimization for PolSARdata[J].International Journal of RemoteSensing, 2015, 36(16): 4233–4249. DOI: 10.1080/01431161.2015.1079345.
[14]Xiao S P, Chen S W, Chang Y L,et al.. Polarimetric coherence optimization and its application for manmade target extraction in PolSARdata[J].IEICE Transactions on Electronics, 2014, 97(6): 566–574.
[15]Chang C C and Lin C J. LIBSVM: Alibrary for support vector machines[J].ACM Transactions on Intelligent Systems and Technology, 2011, 2(3): 389–396.
[16]Chen S W, Wang X S, and Sato M. PolInSAR complex coherence estimation based on covariance matrix similarity test[J].IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(11): 4699–4709. DOI: 10.1109/TGRS.2012.2192937.

陶臣嵩(1993–),男,广西人,国防科学技术大学电子科学与工程学院在读硕士研究生,主要研究方向为成像雷达极化信息的解译与处理、极化特征的提取与优选等。
E-mail: taochensongnudt@163.com

陈思伟(1984–),男,四川人,博士,国防科学技术大学电子科学与工程学院讲师,主要研究方向包括雷达极化信息处理、成像雷达信息处理、目标散射建模与解译、微波遥感大数据处理与应用、微波遥感环境与灾害应用研究等。
E-mail: chenswnudt@163.com

李永祯(1977–),男,内蒙古人,博士后,国防科学技术大学电子科学与工程学院研究员,电子信息系统复杂电磁环境效应国家重点实验室副主任,主要研究方向为新体制雷达与电子对抗。
E-mail: e0061@sina.com

肖顺平(1964–),男,江西人,博士,国防科学技术大学电子科学与工程学院教授,博士生导师,电子信息系统复杂电磁环境效应国家重点实验室主任,国家高技术863专家,总装备部仿真专业组专家,中国电子学会高级会员,主要研究方向包括雷达极化信息处理、电子信息系统仿真评估技术、雷达目标识别等。
s: The National Natural Science Foundation of China (41301490, 61490692)
Polarimetric SAR Terrain Classification Using Polarimetric Features Derived from Rotation Domain
Tao Chensong Chen Siwei Li Yongzhen Xiao Shunping
(The State Key Laboratory of Complex Electromagnetic Environment Effects on Electronics and Information System,School of Electronic Science and Engineering,National University of Defense Technology,Changsha410073,China)
Terrain classification is an important application for understanding and interpreting Polarimetric Synthetic Aperture Radar (PolSAR) images. One common PolSAR terrain classification uses roll-invariant feature parameters such asH/A/α/SPAN. However, the back scattering response of a target is closely related to its orientation and attitude. This frequently introduces ambiguity in the interpretation of scattering mechanisms and limits the accuracy of the PolSAR terrain classification, which only uses roll-invariant feature parameters for classification. To address this problem, the uniform polarimetric matrix rotation theory, which interprets a target’s scattering properties when its polarimetric matrix is rotated along the radar line of sight and derives a series of polarimetric features to describe hidden information of the target in the rotation domain was proposed. Based on this theory, in this study, we apply the polarimetric features in the rotation domain to PolSAR terrain discrimination and classification, and develop a PolSAR terrain classification method using both the polarimetric features in the rotation domain and the roll-invariant features ofH/A/α/SPAN. This method also uses both the selected polarimetric feature parameters in the rotation domain andH/A/α/SPAN as input for a Support Vector Machine (SVM) classifier and achieves better classification performance by complementing the terrain discrimination abilities of both. Results from comparison experiments based on AIRSAR and UAVSAR data demonstrate that compared with the conventional method, which only usesH/A/α/SPAN as SVM classifier input, the proposed method can achieve higher classification accuracy and better robustness. For fifteen terrain classes of AIRSAR data, the total classification accuracy of the proposed method was 92.3%, which is higher than the 91.1% of the conventional method. Moreover, for seven terrain classes of multi-temporal UAVSAR data, the averaged total classification accuracy of the proposed method was 95.72%, which is much higher than the 87.80% of the conventional method. These results demonstrate that our proposed method has better robustness for multi-temporal data. The research also demonstrates that mining and extracting polarimetric scattering information of a target deep in the rotation domain provides a feasible new approach for PolSAR image interpretation and application.
Polarimetric Synthetic Aperture Radar (PolSAR); Polarimetric features; Rotation domain; Support Vector Machine (SVM); Terrain classification
TN957.52
A
2095-283X(2017)05-0524-09
10.12000/JR16131
陶臣嵩, 陈思伟, 李永祯, 等. 结合旋转域极化特征的极化SAR地物分类[J]. 雷达学报, 2017, 6(5):524–532.
10.12000/JR16131.
Reference format:Tao Chensong, Chen Siwei, Li Yongzhen,et al.. Polarimetric SAR terrain classification using polarimetric features derived from rotation domain[J].Journal of Radars, 2017, 6(5): 524–532. DOI:10.12000/JR16131.
2016-11-30;改回日期:2017-01-24;网络出版:2017-04-07
*通信作者: 陈思伟 chenswnudt@163.com
国家自然科学基金(41301490, 61490692)
