基于光学杠杆法的微纳位移测量系统*
2017-11-23马树军李鲁鲁
张 冲, 马树军, 李鲁鲁, 修 强
(东北大学 机械工程与自动化学院,辽宁 沈阳 110819)
基于光学杠杆法的微纳位移测量系统*
张 冲, 马树军, 李鲁鲁, 修 强
(东北大学机械工程与自动化学院,辽宁沈阳110819)
采用自行设计搭建的光学杠杆光路系统,使用位置敏感度探测元件(PSD)对悬臂梁的微小挠度变化进行测量。介绍了实验原理及系统搭建。实验测量与分析表明:系统分辨力可达0.06 μm。对自制的悬臂梁挠度变形进行测量,并与微动平台的实际位移量对比,结果基本一致,验证了系统的可靠性。
光学杠杆; 悬臂梁; 静态测量; 挠度; 位置敏感度探测元件
0 引 言
精确测量微悬臂梁在传感过程中的变形,对于微观领域的发展及传感具有重要的意义[1~5]。光学杠杆法结构简单,敏感度高,环境适应性强,能够在真空、空气、混合气体和液体等环境中进行测量。
本文系统采用正入射共光路的形式,即激光的发射光路与激光的接收光路相重合,缩短系统的测量环路,减小了系统漂移,同时,使得整个测量系统更加的紧凑;采用数值标定的方法获取系统测量的敏感度,减少了直接测量元件由布局产生的测量误差,提高了测量精度。系统具有成本低,灵敏度高,结构简单,便于实际测量,无接触等优点。
1 实验原理
1.1 光路模型的搭建
基于光学杠杆原理的悬臂梁挠度测量的基本模型如图1所示,采用聚焦透镜与分光棱镜相结合的共光路系统,入射光线通过聚焦透镜将准直的光束聚焦到悬臂梁上,悬臂梁位于透镜的焦距处,当悬臂梁入射点处转角或者挠度发生改变时,光电位置传感器上的光斑位置发生改变,通过一定的矫正运算,悬臂梁的微小挠度变化可以转换为光电位置传感器上较大的位置信号,实现了对微小位移的放大。

图1 光路的几何关系
由图1知,当长度为L的微悬臂梁产生微小变化时光斑位置变化与悬臂梁挠度变化之间的关系为

(1)
由于反射的光斑需要在PSD上成像,需要在PSD前加上成像透镜,则

(2)
系统的整体放大倍数为

(3)
对入射光束聚焦到微悬臂梁上,光斑的大小影响系统测量的横向分辨力,因而应使得聚焦光斑尽量小,对于准直光束产生的聚焦光斑的直径D与激光波长λ,光束模式参数M、透镜焦距f1、激光入射直径φ0有如下关系[12]
(4)
为了获得较大的放大倍率,实现高灵敏度测量,需要有较大的f1值,此时即与获得小聚焦光斑相矛盾。因此,需要合理地选择参数。
1.2PSD
系统通过光电PSD感知光斑位置的变化。PSD内部结构的示意图如图2中所示,当有光斑照在横向效应PSD表面时,在照射点处产生与光强成比例的电荷,光电流的大小与电极之间的距离成反比,通过检测光电流大小可以得到光斑的位置。基于这个原理工作的PSD对光斑形状及强度分布无高要求。相比于象限,没有工作死区,线性度较好。
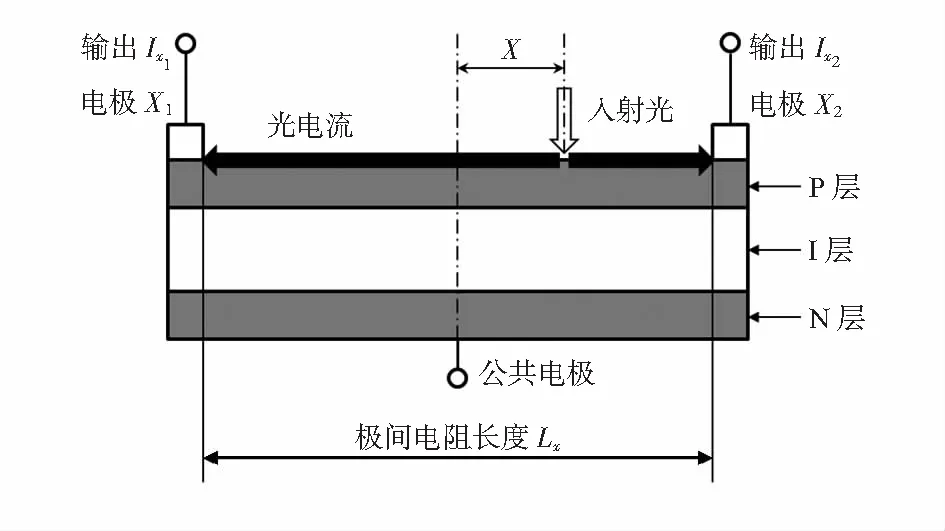
图2 PSD截面
以PSD中心点作为坐标原点,入射光斑位置X的计算公式为

(5)
2 实验搭建
系统总体组成如图3所示,通过光学杠杆的方法对悬臂梁的挠度进行感知放大,通过PSD获取光斑位置信号,并经过后续的信号处理与数据采集,上传至电脑,进行数据处理,最终获得悬臂梁挠度变化的情况。

图3 测量系统的总体组成
2.1 光学系统的搭建
如图4所示为系统测量悬臂梁挠度变化搭建的设备。系统中各个光学器件采用30 mm笼式系统(CP06/M笼板,ER6—04装配支杆)进行搭建,将二极管激光器(功率5 mW,波长为635 nm)作为入射光源通过调节支架嵌入系统中,通过光阑GCT—570101调整入射光斑大小,经分光棱镜(CM1—BS013)分光,并通过焦距f=30 mm的平凸透镜LA1805—A将光束聚焦在悬臂梁上,反射光束再先后经过聚焦透镜,分光棱镜及f=100 mm的平凸透镜LA1509—A在PSD上进行光斑成像。在PSD前设置635 nm波长的窄带滤光片,仅通过波长635 nm的测量光束,滤掉其他干扰光,有效减少杂光和背景光对PSD测量的影响。
采用长90 mm,宽13 mm,厚0.5 mm的自制的悬臂梁,并在表面贴附0.15 mm厚的反光膜,通过使用精密微动平台带动顶尖使悬臂梁产生挠度。
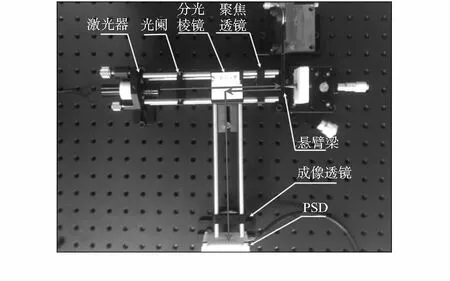
图4 测量实验实物
2.2 信号处理与采集
光电传感器选择基于横向效应的S3932 PSD,基本参数为:工作区域为1 mm×12 mm;波长响应范围为320~1 100 nm(峰值为920 nm);敏感度为0.55 A/W。
PSD信号处理过程如图5中所示,将PSD电极两端输出的微弱光电流信号,进行前置的I-V放大,通过电路加法器与减法器实现两路信号的差与和,通过单片机进行除法运算,通过USB接口与电脑通信,采用LabVIEW软件采集相应的位置信号并通过电脑进行处理显示。
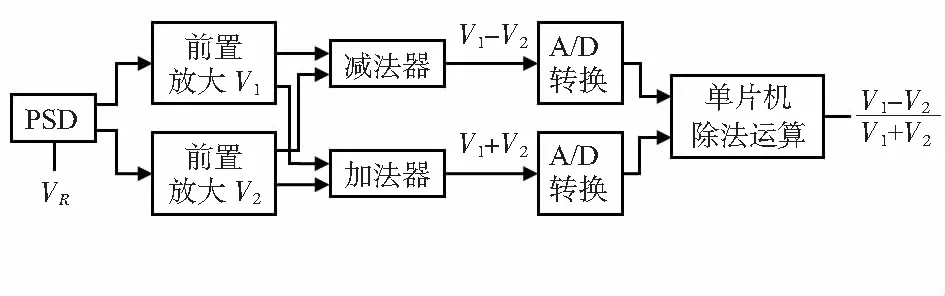
图5 PSD信号处理
3 实验测量与分析
3.1 系统灵敏度标定
通过式(3)可知,在小变形范围内,悬臂梁挠度变化与光斑位置变化呈线性关系,同时光斑位置变化与PSD输出量在小范围也是呈线性的。精密微动平台以一定的伸长量Δh/mm加载于待测悬臂梁上,悬臂梁产生挠度为Δz,在弯曲很小的情况下悬臂梁弯曲量等于平台移动量:Δz=Δh。微悬臂梁的弯曲引起光杠杆光路发生偏转,使PSD输出信号产生变化ΔU。悬臂梁弯曲量与PSD输出信号满足线性关系,所以,光杠杆系统对悬臂梁弯曲量的检测灵敏度可表示为

(6)
系统灵敏度S标定结束后,后续测量时,当悬臂梁有一定变形时使得PSD输出发生改变ΔU1,此时悬臂梁的挠度变化为Δz1=ΔU1/S。
标定具体步骤:1)缓慢移动微动平台,带动顶针与悬臂梁刚接触,此时悬臂梁位于初始位置。2)每次以步长0.05 mm成阶梯状步进0.5 mm。3)对每个阶梯上的PSD输出取平均值,计算每个阶梯PSD的输出量的变化随悬臂梁挠度变化的关系,并进行线性拟合,如图6所示。
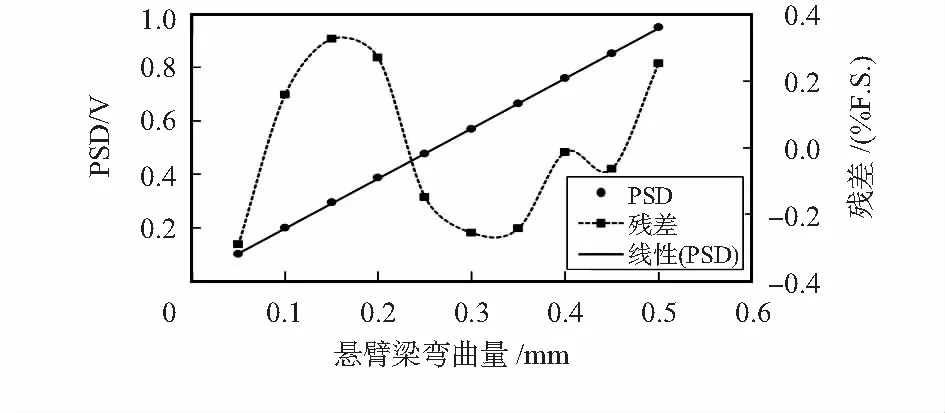
图6 灵敏度标定曲线
通过数据拟合可得到悬臂梁弯曲量与PSD输出的函数关系为y=1.875 5x+0.010 1,拟合曲线的斜率即为系统的灵敏度,即S=1.875 5 V/mm。从每点的残差可以看出悬臂梁的弯曲量与PSD输出电压之间线性度良好,最大残差小于0.4 %。对系统输出信号的分析表明,输出电压噪声标准差为0.12 mV,根据系统灵敏度标定结果可知:系统的分辨率为0.06 μm。
3.2 悬臂梁挠度测量
为验证系统的可行性,针对已标定的系统灵敏度来进行悬臂梁的挠度测量。具体步骤:1)将悬臂梁固定在支架上,调整悬臂梁至聚焦透镜处,使得光斑最小。2)调整精密微动平台至与悬臂梁刚接触,开始采集,同时微动平台以2.5 μm的步距200 s间隔成阶梯状步进25 μm。3)根据标定的灵敏度结果计算每个台阶对应的挠度大小,与微动平台的实际位移量的结果相对比。
图7和表1中为测量结果,实验中,对每个台阶对应的输出进行200次测量,取其均值与已求得系统的灵敏度相除即得挠度测量的均值。利用Matlab对采集的数据进行分析可得系统测量的最大标准差约为0.18 μm,200次测量均值的A类不确定度为0.014 5 μm。以微动平台的位移量作为参考,测量结果与实际位移量十分接近,最大相对误差不超过4 %,表明实验结果可靠。

图7 悬臂梁挠度测量曲线

序号针尖位移量/μm测量次数PSD电压均值/VPSD输出变化量/V测量挠度均值/μm挠度变化标准差/μmA类不确定度/μm相对误差/%10.02001.0023参考零点22.52000.99740.00492.58700.10200.01153.48035.02000.99310.00924.91990.10280.00801.60347.52000.98880.01357.20590.15340.00833.922510.02000.98410.01829.71220.11000.01172.878612.52000.97930.023012.26180.08960.00821.906715.02000.97460.027714.75500.15750.00731.633817.52000.96980.032517.32140.09750.01131.020920.02000.96500.037319.87130.13030.00740.6431022.52000.96030.042022.40020.11150.01010.4441125.02000.95560.046724.90040.17910.01450.399
4 结 论
1)研制了基于光学杠杆原理高精度微纳位移测量装置。装置更加简单方便操作,成本较低,测量分辨率较高;2)对自制悬臂梁挠度变形进行测量,测量标准差小于0.18 μm,测量结果误差在4 %以内。
[1] 唐 洁.压电微悬臂梁传感器技术研究[D].天津:天津大学,2005.
[2] 景大雷.用于气体测量的压电微悬臂梁力学建模与实验研究[D].哈尔滨:哈尔滨工业大学,2011.
[3] 滕艳华,薛长国.微悬臂梁传感器在环境检测中的应用[J].传感器与微系统,2011,30(4):5-7.
[4] 杨天天.应力型微悬臂梁生化传感器响应机理研究进展[J].传感器与微系统,2014,33(6):5-8.
[5] 刘志伟,童朝阳,穆晞惠,等.一种压阻式微悬臂梁免疫传感器及其动力学分析[J].传感器与微系统,2014,33(3):8-11.
[6] Meyer G,Amer N M.Novel optical approach to atomic force microscopy[J].Applied Physics Letters,1988,53(12):1045.
[7] 黄 渊.基于光学读出的微悬臂梁生化传感技术研究[D].合肥:中国科学技术大学,2009.
[8] 包汉瑜,吴 森,吴瑶瑶.微悬臂梁横向弹性系数标定技术[J].传感器与微系统,2012,31(8):60-63.
[9] Tamayo J,Pini V,Kosaka P,et al.Imaging the surface stress and vibration modes of a microcantilever by laser beam deflection microscopy[J].Nanotechnology,2012,23(31):315501.
[10] Beaulieu L Y,Godin M,Laroche O,et al.A complete analysis of the laser beam deflection systems used in cantilever-based systems[J].Ultramicroscopy,2007,107(4-5):422-430.
[11] Herfst R W,Klop W A,Eschen M,et al.Systematic characteri-zation of optical beam deflection measurement system for micro and nanomechanical systems[J].Measurement,2014,56:104-116.
[12] 刘 璐,李艳宁,吴 森,等.基于显微光杠杆技术的微结构偏转角测量系统[J].光学技术,2014,40(3):219-224.
[13] 吴 森,陈庆超,张 超,等.基于弯曲法的AFM 微悬臂梁弹性常数标定技术[J].仪器仪表学报,2012,33(11):2446-2453.
[14] 宋云鹏,吴 森,傅 星,等.AFM微悬臂梁探针弹性常数各种标定方法的比较与分析[J].传感技术学报,2015,28(8):1161-1168.
Micro-nanodisplacementmeasurementsystembasedonopticallever*
ZHANG Chong, MA Shu-jun, LI Lu-lu, XIU Qiang
(SchoolofMechanicalEngineering&Automation,NortheasternUniversity,Shenyang110819,China)
Using self-designed optical lever light path system and position sensitive detector(PSD) to measure small deflection of cantilever.Experimental principle and system building are introduced.Experimental measurement and data analysis are implemented.The resolution of measurement system can reach 0.06 μm.Using this system to measure small deflection of homemade cantilever.Through comparing with the actual displacement of micro-positioning platform,the results are basically identical.It verifies reliability of the system.
optical lever; cantilever; static measurement; deflection; position sensitive detector(PSD)
10.13873/J.1000—9787(2017)11—0103—03
TN 29
A
1000—9787(2017)11—0103—03
2016—11—02
国家自然科学基金资助项目 (51505076);辽宁省自然科学基金资助项目 (2015020105);中央高校基本科研业务费项目(N140304010,N150308001);辽宁省高等学校创新团队项目(LT2014006)
张 冲(1990-),男,硕士研究生,研究方向为微/纳悬臂梁传感器测量。
马树军(1982-),男,通讯作者,副教授,硕士生导师,主要从事微机电系统(MEMS)的执行器和传感器方面研究工作,E—mail:mashujun@me.neu.edu.cn。
