多目标无序量测OOSM-GMPHD滤波算法
2017-11-23胡建旺
赵 凯, 胡建旺, 吉 兵, 刘 钢
(1.军械工程学院 信息工程系,河北 石家庄 050003; 2.71697部队,河南 新乡453600)
多目标无序量测OOSM-GMPHD滤波算法
赵 凯1, 胡建旺1, 吉 兵1, 刘 钢2
(1.军械工程学院信息工程系,河北石家庄050003;2.71697部队,河南新乡453600)
针对无序量测条件下多目标跟踪问题,提出了一种适用于线性系统的单步滞后无序量测滤波算法(OOSM-GMPHD)。在前向预测框架内,以高斯混合概率假设密度(GMPHD)滤波器为基础滤波算法,对每一高斯分量分别用延迟到达的量测与等价量测进行预测、更新,经剪枝与合并等步骤获得最终的目标数量与状态估计。仿真结果表明:算法可有效消除无序量测的影响,准确估计多目标数目和状态。
多目标跟踪; 无序量测; 单步滞后; 高斯混合; 前向预测
0 引 言
多目标跟踪技术一直是跟踪领域研究的热点,被广泛应用于军事、民用领域[1~4]。然而在多目标跟踪中,存在着目标数目未知且随时间变化、探测概率未知、虚警概率大、目标杂波多等不利因素,严重影响到多目标的有效跟踪。传统的多目标跟踪技术主要采用数据关联技术,需要建立“量测—航迹”对应关系,从而使多目标跟踪问题转化为多个简单的单目标跟踪问题。但当目标数量过大、杂波较多时,存在NP难问题。
为避免复杂的数据关联难题,文献[5]提出了基于随机有限集理论的概率假设密度(probability hypothesis density,PHD)滤波,但PHD求解过程中存在着复杂的多重积分运算,难以计算。因此,文献[6]给出了PHD滤波器的序贯蒙特卡罗(sequential Monte Carlo,SMC)实现;文献[7]给出了PHD滤波器的高斯混合(Gaussian mixture,GM)实现方式。由于GM实现方式的计算量相对较小且精度较高,更易于实现状态与误差的估计,因此,其被广泛用于近似化求解PHD滤波。
在多目标跟踪系统中,融合中心须通过网络传输接收各传感器量测进行处理[8]。由于各传感器采样频率、预处理时间、通信延迟不同,各量测传输到融合中心时,常会产生无序量测(out-of-sequence measurement,OOSM)问题[9~11],即同一目标的较早时刻的量测在较晚时刻的量测之后到达,然而现有的PHD滤波无法直接处理此类负时间更新问题。文献[12]提出了处理OOSM的前向预测方法,并指出该方法与过程噪声模型无关,精度较高,且计算量与储存量较小,利用滞后的量测数据对最新时刻的目标状态进行再更新,以获得更精确的状态估计与协方差矩阵。这一方法为研究OOSM问题提供了框架。
对此,在前向预测框架内提出了OOSM-GMPHD算法,可处理单个量测单步滞后情形下的多目标跟踪问题。
1 无线射频系统与PHD滤波原理

1)k时刻多目标状态模型用RFS描述为
Xk=Sk|k-1(Xk-1)∪Bk|k-1(Xk-1)∪Γk
(1)
式中Xk-1为k-1时刻的目标状态RFS;Sk|k-1为从k-1~k时刻存活目标状态RFS;Bk|k-1为k-1~k时刻由Xk-1衍生(Spawn Birth)的目标状态RFS;Γk为k时刻新生(New Birth)目标状态RFS。
2)k时刻目标量测模型用RFS描述为
Zk=Ck(Xk-1)∪Θk(Xk-1)
(2)
式中Ck为杂波与虚警量测RFS;Θk为Xk的量测RFS。
根据经典Bayes估计理论,基于RFS的多目标Bayes估计表示为
pk|k-1(Xk|Z1:k-1)=
(3)
pk(Xk|Z1:k)=

(4)
式中pk|k-1与pk为多目标先验、后验概率;fk|k-1为状态转移概率;gk为量测似然函数;μ为某一空间近似Lebesgue测度。
由于Bayes估计中积分运算的存在,且量测似然函数gk的计算量随着目标数目增加而呈指数级增长,因此直接用其对目标状态与数目进行估计十分困难。Ronald Mahler利用多目标后验分布的概率假设密度(PHD)来近似后验概率密度,极大减小了计算量[13]。
2 多目标OOSM问题描述
假定目标i的状态向量为xi,量测向量为Zi
(5)
(6)

假设tk时刻,已有目标i的状态估计
(7)

来自t=td时刻的量测
(8)

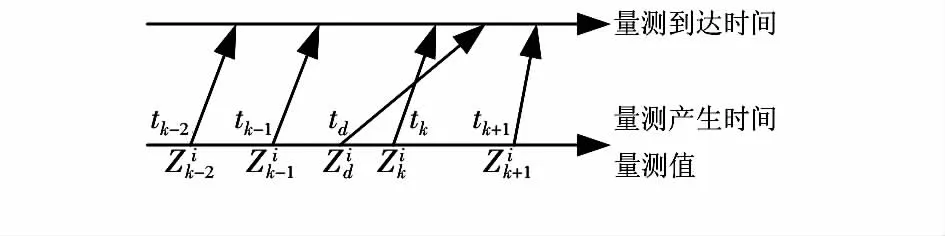
图1 单步滞后OOSM情形
3 基于前向预测的OOSM-GMPHD滤波算法
3.1 GMPHD多目标滤波算法
在应用GMPHD滤波算法时,除PHD滤波器常用假设之外,还需要满足[14]:
1)单目标马尔科夫转移密度与似然函数均为线性高斯;
2)目标存活概率PS和为常数;检测概率PD为常数;
3)目标新生和衍生过程的PHD均为高斯混合形式。
GMPHD滤波器大致可分为预测与更新2步进行。假设已知tk-1时刻的目标后验强度Dk-1(x),且其形式满足
(9)
式中Jk-1为高斯混合分量个数。
a.预测步
tk时刻预测强度为
Dk|k-1(x)=γk(x)+Ds,k|k-1(x)+Db,k|k-1(x)
(10)
式中γk(x),Ds,k|k-1(x)与Db,k|k-1(x)分别为新生目标密度,存活目标和衍生目标的PHD,即
(11)
(12)
(13)
各分量具体形式可表示为
更进一步地,预测步PHD可表示为
(14)
式中
Jk|k-1=Jb,k|k-1+Jγ,k+Jk-1
(15)
b.更新步
经过更新,tk时刻后验强度为

(16)
(17)

由此可知,经过PHD更新后,k时刻的高斯分量个数为Jk=(1+|Zk|)Jk|k-1(|Zk|为集合Zk的势,即元素的个数)。这样,后验概率密度的高斯项随时间变化将会无限制地增加,为了解决这一问题,需要采用剪枝、合并等措施将其控制在一定的数目范围内。
3.2 等价量测
等价量测方法在基于卡尔曼滤波与粒子滤波的OOSM更新算法中应用较多,其原理是将该OOSM发生时刻之后的所有量测用一个等价量测代替,用来更新到最新时刻的状态估计,解决多步滞后OOSM问题,而不储存该段时间内的量测数据、状态估计与协方差矩阵。

(18)
式中
(19)
(20)
(21)
(22)
(23)
3.3 前向预测框架内的OOSM-GMPHD滤波算法
基于前向预测方法的基本思想为:当系统接收到OOSM时,将滤波过程返回其产生时刻的前一时刻,顺序地用该OOSM与晚于其产生时刻的等价量测分别进行滤波更新,得到最新时刻的状态估计。具体过程如图2所示。在接收到OOSM后,根据时戳,得到该OOSM在量测序列中的位置,按照图2中①,②,③所示流程进行运算。
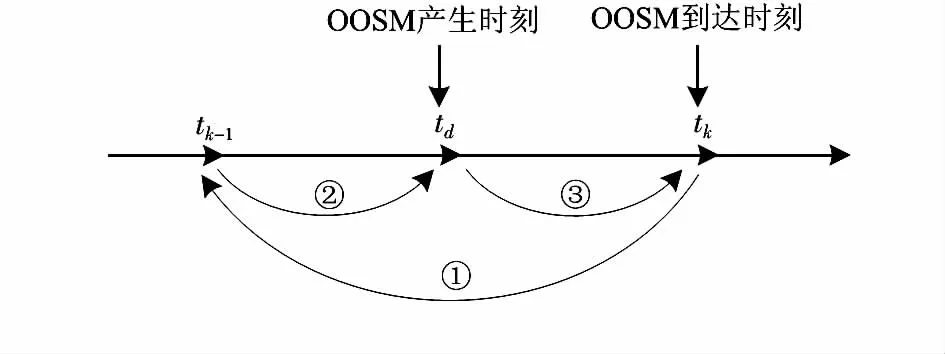
图2 前向预测方法流程
从实质上看,前向预测法是一种不完全的顺序更新,在滤波精度与计算量之间取得了平衡。这一过程还可表述为
(24)
为解决线性系统无序量测条件下的GMPHD滤波问题,提出基于前向预测框架的OOSM-GMPHD滤波算法,将最新时刻每一个高斯分量纳入前向预测框架内。融合中心须将tk-1时刻的PHDDk-1(x)进行储存,当tk时刻的系统得到后验PHDDk(x)后,收到滞后到达的OOSMZd,则须将滤波过程返回至tk-1时刻,具体处理过程如下:
1)预测并更新tk-1~td时刻的分量状态。利用OOSMZd对tk-1时刻的每一个高斯分量进行滤波,得到td时刻的PHDDd(x)。具体过程如式(13)~式(20)所示。
2)对td时刻的PHDDd(x)进行剪枝与合并处理。设定一个权值门限Tprun,权重小于合并距离的高斯项将会被剔除,该步骤称为剪枝。Clark,Panta和Vo提出采用式(25)定义的合并距离[14]
(25)
另外设定门限Tmerg,当两个分量合并距离小于此门限时,将会合并成单个分量。经过此步,高斯分量数量会有所减少。
3)提取td时刻目标数量与状态。将Jk个分量权值求和,即得到目标数量;权值大于0.5的高斯分量的均值对应为目标的状态。其中,目标数量可表示为
(26)

5)对Dk(x)进行剪枝与合并、状态提取,得到最新时刻的目标数量与状态。
4 仿真验证
以二维平面内多目标运动情形为例,通过仿真实验综合验证OOSM-GMPHD算法在无序条件下的跟踪性能,并忽略OOSM的处理方式,即丢弃滞后量测法与真实值做对比,以验证算法的有效性。
4.1 参数设置
假设目标的监测区域为[-100 m,100 m]×[-100 m,100 m]的二维平面,对应的目标状态方程为

(27)
空间中有4个目标在运动,相继出现或消失。传感器对4个目标进行观测,得到的量测为其位置的二维坐标。假设每次扫描的杂波数服从泊松分布,且该过程中忽略衍生目标出现,则传感器量测方程可表示为
(28)

4.2 仿真一
在跟踪过程的前7 ,传感器获得7个量测。融合中心最终收到的量测序列为{z1,z2,z3,z5,z4,z6,z7}。比较为t=6时刻的位置分量均方根误差(RMSE)及目标数量。
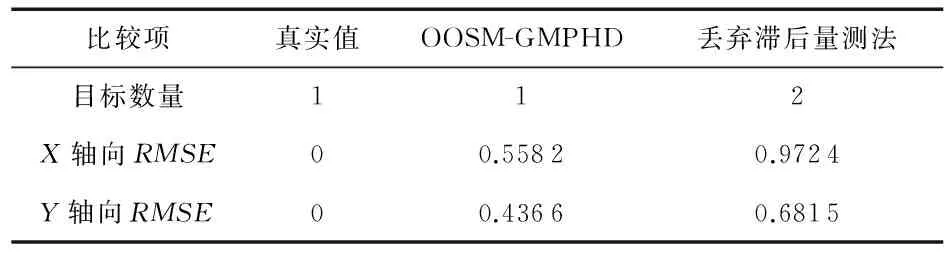
表1 仿真一结果
分别用OOSM-GMPHD算法、丢弃滞后量测法进行处理,将得到的结果与真实值做比较,结果如表1所示。可以看出,OOSM-GMPHD的RMSE远低于丢弃滞后量测法,即跟踪精度较高;且丢弃滞后量测法在目标数量估计上出现了偏差,此项的RMSE数值忽略了误差较大的目标。
4.3 仿真二
现将跟踪时间延长至35,即融合中心收到35个量测。同样假设每7个量测中包含一个单步滞后的OOSM。分别使用OOSM-GMPHD算法与丢弃滞后量测法处理上述量测,将滤波结果与目标真实运动轨迹、数量做比较,结果如图3、图4所示。
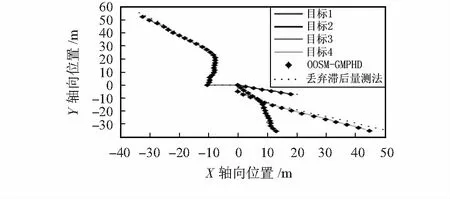
图3 多目标真实航迹与不同算法状态估计

图4 不同算法多目标数目
图3为多目标真实航迹与不同算法状态估计的对比,可以看出:尽管多目标的量测数据中含有多个OOSM,但在使用OOSM-GMPHD算法滤波后,这些OOSM被应用到了状态更新中,得到的多目标的状态估计量可以很好地跟踪目标的真实运动状态,表明了该算法的有效性 。
图4给出了在不同时刻量测数据经过OOSM-GMPHD算法处理得到的目标数量与丢弃滞后量测法及真实值的对比,算法对目标数目的估计基本接近真实值,优于丢弃滞后量测法,目标的数目估计更加准确。
5 结 论
对于无序量测条件下的多目标跟踪问题,给出的OOSM-GMPHD滤波算法能够有效地跟踪多个目标,可对目标的数目及状态做出有效估计。算法在前向预测框架内,对每一个高斯分量分别使用OOSM与等价量测进行更新,而后利用剪枝与合并算法,提取出目标数量与状态估计。仿真结果表明:该算法能准确跟踪无序量测条件下的多个目标。
[1] Bar-Shalom Y,Fortmann T E.Tracking and data association[M].San Diego:Academic,1988.
[2] 郝燕玲,孟凡彬,张崇猛,等.多传感器多目标跟踪的粒子PHD滤波算法[J].传感器与微系统,2010,29(4):18-21.
[3] 赵 斌,胡建旺,吉 兵.改进匹配方法的BFG-GMPHD滤波算法[J].传感器与微系统,2016,35(7):136-139.
[4] 刘丽娟,刘国栋.基于ET-GM-PHD的多传感器多目标跟踪算法[J].传感器与微系统,2013,32(10):126-128.
[5] Mahler R P S.Multitarget Bayes filtering via first-order multitarget moments[J].IEEE Transaction on Aerospace and Electronic Systems,2003,39(4):1152-1178.
[6] Vo B N,Singh S,Doucet A.Sequential Monte Carlo methods for multi-target filtering with random finite sets[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1224-1245.
[7] Vo B N,Ma W K.The Gaussian mixture probability hypothesis density filter[J].IEEE Transactions on Signal Processing,2006,54(11):4091-4104.
[8] 袁 丁,胡建旺,吉 兵,等.快速边缘粒子滤波在无序量测问题中的应用[J].传感器与微系统,2014,33(6):157-160.
[9] 韩崇昭,朱红艳,段战胜,等.多源信息融合 [M].2版.北京:清华大学出版社,2010:368-379.
[10] 王洪峰,周 磊,单甘霖.国外军事信息融合理论与应用的研究进展[J].电光与控制,2007,14(4):13-17.
[11] 吴卫华,江 晶.无序量测问题研究综述[J].传感器与微系统,2014,33(12):5-9.
[12] 周文辉,李 琳,陈国海,等.单步延迟无序量测滤波算法的最优性分析[J].中国科学,2007,37(4):564-580.
[13] Mahler R.A theory of PHD filters of higher order in target numb-r[C]∥Proceedings of SPIE—The International Society for Optical Engineering,2006:62350K—1—62350K-12.
[14] Daniel Clark,Ba-Ngu Vo.Convergence analysis of the Gaussian mixture PHD filter[J].IEEE Transactions on Singnal Processing,2007,55(4):1204-1212
Multi-targetOOSM-GMPHDfilteringalgorithmwithout-of-sequencemeasurement
ZHAO Kai1, HU Jian-wang1, JI Bing, LIU Gang2
(1.DepartmentofInformationEngineering,OrdnanceEngineeringCollege,Shijiazhuang050003,China;2.Unit71697ofPLA,Xinxiang453600,China)
For addressing multi-target tracking problem with out-of-sequence measurement(OOSM),a filtering algorithm is proposed with multiple single-step-lag OOSM for linear system,which denotes as OOSM-Gaussian mixture probability hypothesis density(GMPHD).Within the forward prediction framework,taking GMPHD as basis filtering algorithm,predicting and updating each Gaussian component,and then can obtained the target number and state estimation after pruning and merging.etc.Simulation results show that the algorithm can effectively filter out influence of OOSM and can accurately estimate the multi-target number and state.
multi-target tracking; out-of-sequence measurement(OOSM); one-step-lag; Gaussian mixture(GM); forward prediction
10.13873/J.1000—9787(2017)11—0154—04
TP 391
A
1000—9787(2017)11—0154—04
2016—10—27
赵 凯(1991-),男,硕士研究生,主要研究方向为目标跟踪与多源信息融合,E—mail:609587194@qq.com。
