无人机载框幅式高光谱影像的波段配准研究*
2017-11-23王晶晶刘含海
王晶晶,史 云※,刘含海, 2
(1.中国农业科学院农业资源与农业区划研究所/农业部农业信息技术重点实验室,北京 100081; 2.山东交通学院交通土建工程学院,济南 250023)
·技术方法·
无人机载框幅式高光谱影像的波段配准研究*
王晶晶1,史 云1※,刘含海1, 2
(1.中国农业科学院农业资源与农业区划研究所/农业部农业信息技术重点实验室,北京 100081; 2.山东交通学院交通土建工程学院,济南 250023)
目的高光谱成像技术在卫星遥感平台上由于飞行高度与技术限制等原因无法满足当前对于智慧农业与精准农业的需求,无人机平台的出现可以有效地弥补这一问题,给精细化、定量化研究农田信息提供数据支持。受平台稳定性,荷载能力等因素的制约,传统的推扫式高光谱成像仪不适用于无人机平台,而框幅式成像仪的应用前景较为广泛。但此类成像仪由于成像原理等因素的影响,获取的波段图像间存在姿态与位置差异,无法直接投入到后期应用中,在投入使用前需要进行波段配准。方法结合传统基于特征点的配准方法针对波段配准展开研究,对图像间灰度与位置差异对配准精度的影响进行了深入分析,针对传统的研究方法在匹配灰度存在非线性变换的图像上不足等问题,设计了两组匹配策略实验,分别为拍摄顺序的配准实验对比与波段顺序的配准实验对比。结果通过实验对比证明在引入拍摄顺序的变换基准的匹配策略下可以自动且稳定完成配准任务,此方法下配准精度可以达到亚像元级。结论文章所提方法兼顾了波段顺序与拍摄顺序,匹配结果可达亚像元级,是较优的匹配策略。
高光谱 无人机 波段配准 框幅式 匹配策略
0 引言
随着遥感技术的迅速发展,人们对地探测的精度需求越来越高,而高光谱技术具有图谱合一、高光谱分辨率、信息量丰富等优势,成为了定量遥感的前沿技术之一,给定量化理解地面信息开辟了新的领域[1-2,12],其在农业领域得到了广泛应用[23-24]。同时,由于高光谱技术不仅可以准确的反映作物自身特有的光谱特征,还可以反映作物之间的光谱差异[1-2],使其在农作物长势监测,病虫害预防治,产量估测等方面的研究已经十分深入。但由于传统的卫星平台飞行高度与技术限制等原因,使其数据空间分辨率低,时效性差,成本较高等问题,从而制约了卫星平台高光谱数据的应用范围及精度,无法满足精准农业,智慧农业的精度需求。无人机平台的出现可以有效地弥补这一问题,为农业遥感定量化研究,精准农业,智慧农业的实现提供有力的数据保障及技术支持。
目前,常用的高光谱成像仪可以按照成像原理分为两大类:推扫式光谱成像仪与框幅式光谱成像仪。这两种成像仪由于成像原理的差异造成了存储模式与数据处理的差异,而推扫式光谱仪是技术相对较为成熟,应用也较为广泛的一类成像仪[4]。这种方式的成像仪获取的图像我们称为“狭缝图像”[4],其成像原理为入射能量通过加装在镜头前宽度可以忽略的狭缝后,将原信息变换为对应地面的1条一维信息,然后采用如三棱镜等的分光装置进行分光处理,从而将一维信息分解为具有光谱维度的二维信息,即狭缝图像,因此图像在投入使用前要进行格网化[6],将同一波段获取的地面条带信息拼接为对应的二维空间图像,而这一过程则需要精度较高的辅助信息,如姿态与位置信息,这些信息需要利用搭载在平台上的IMU/GPS装置在拍摄曝光瞬间获取,若缺乏拍摄时相对应的姿态位置信息,狭缝图像的配准工作将无法进行,这将直接影响到后期数据的应用。然而对于微小型无人机平台而言,其荷载能力是十分有限的,高精度的惯导装置往往不能完全适用[5]。这就意味着目前精确获取微小型无人机平台姿态定位信息还较为困难,不能满足推扫式光谱成像仪的应用需求。而另一类框幅式光谱仪可以有效地避免因缺乏姿态定位信息而无法完成配准的问题,因此这类成像仪在小型无人机平台高光谱技术的研究与应用方面前景广泛,它的成像原理与普通相机一致,都是基于小孔成像获取地面图像,而多波段图像的获取主要通过镜头加装的滤波装置完成的,通过镜头的滤光装置不断改变成像时的能量范围从而得到对应波段范围的波段图像[3]。由于图像是在飞行平台运动过程中逐波段获取而得,对应同一地物不同波段图像间会存在姿态位移差异,因此原始图像不能直接投入到后期的研究与应用中去,在投入使用前应消除这种波段图像间空间位置上的差异。
框幅式高光谱成像仪获取波段图像的配准可以抽象为传统配准问题,利用图像自身的特征建立图像间的数学关系,因此无需地理信息的辅助也可以完成相对基准下的配准任务。对于这类成像仪的配准问题进行进一步分析,相对于传统的配准问题,它也具有自身独特的问题。下面就对这两类问题分别展开讨论,首先是传统问题的分析,这一类问题主要由平台造成,由于小型无人机质量较轻,易受环境影响,因此在飞行中的平稳性差,在数据采集过程中,平台会围绕三轴发生旋转,形成俯仰角,偏航角与翻滚角,这些姿态的差异会造成图像成像时三维空间到二维空间的投影差异[18]。此外,由于波段图像在飞行过程中逐一获取,各波段图像间存在空间位置上的差异,波段配准就是为了消除这种同一地物在不同波段图像上的空间差异。而另一类自身独特的问题主要由成像仪的性质造成,这类问题主要体现在图像上的位置与灰度差异[19]。首先,由于框幅式高光谱成像仪按一定的波段顺序进行波段图像的获取,这就意味着单景多波段图像是在不同的波段范围成像的结果,由于同一地物在不同波段的反射率存在差异,图像上的灰度会因此存在差异,即同一地物的不同波段图像间的灰度因反射率而发生变化。同时,由于不同地物的反射率在同一范围的变化趋势不同,会造成地物间的对比度发生变化,如图1(ENVI标准库中获取)所示,以植被与土壤反射率曲线为例,可以看出在可见光波段范围二者反射率较为相近,二者对比度比较平缓,由于较为接近,会使植被与周围背景不易区分,而在近红外波段范围植被的反射率明显高于土壤,二者对比度较为强烈,易于区分。另外,在600nm~700nm间的植被红光吸收带,可以看出植被反射率明显低于土壤,在图像灰度上则体现为土壤亮度要高于植被,而在760nm之后的近红外范围植被反射率明显高于土壤反射曲线,在这个范围植被与土壤在图像上的灰度对比度会发生翻转,即植被亮度明显高于土壤。待配准图像间的灰度与对比度存在较大差异,这种问题传统配准中甚少涉及。
对于框幅式高光谱成像仪获取的波段图像的波段配准问题,要同时考虑传统问题与自身独特问题的解决,通过消除波段图像间姿态位移上的差异,最终获取地物对应光谱图像立方体。目前,国内外关于无人机波段配准问题的研究较为缺乏,相关领域的配准问题在此问题的应用上还存在制约。目前,可以完成自动图像配准的软件主要针对单一波段范围的图像或可见光图像,对于多波段图像的配准需要手动选点,半自动完成配准,这会直接影响配准的效率[19]。虽然基于多波段图像的配准研究较为广泛,但由于成像机理不同导致基于线阵成像的配准方法无法运用到框幅式配准中[3]。有人进行了全色图像与多波段图像间的配准实验[20],由于全色图像信息丰富,与多波段配准问题相比复杂度明显较低。可见光与近红外配准中通过优化参数实现配准的方法在相对复杂的波段配准问题上,无法实现快速自动化处理[21]。此外,还有人进行了亚像元级的多光谱配准实验[22],虽然可以取得较好的实验效果,但对图像间空间位置要求较高,当空间位置差异过大时算法失效。因此,当前对于波段配准问题还没有针对性的解决方案可以实现自动化高效的配准方法。故该文针对波段配准问题结合当前传统配准方法进行了配准研究。
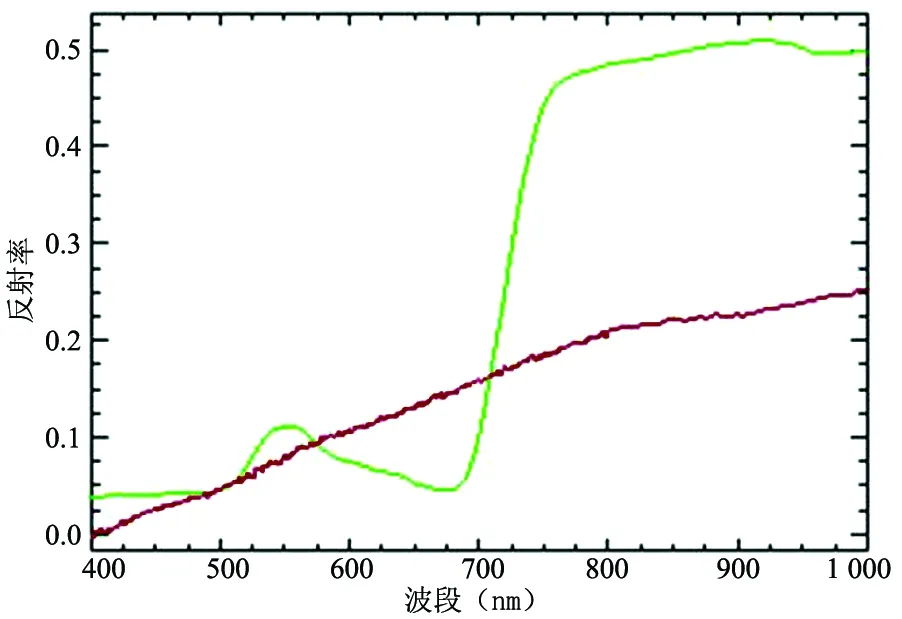
图1 植被与土壤反射率
1 配准流程
1.1 实验数据
试验区位于北京门头沟区的京浪岛文化体育公园内,测区面积为0.012 6km2,相机采用德中天地自主研发高光谱成像仪,飞行高度为100m,地面空间分辨率为7.8cm,像幅大小为1 010pixel×648pixel,共获取61景影像,每景50个波段,波段范围为500~900nm之间。
1.2 实验步骤
目前,针对框幅式高光谱数据的配准研究较为缺乏,该文采用图像的一般配准过程对其进行配准实验,基于特征点的配准过程可分为4步:(1)参考图像与待配准图像的确定,确定配准的基准; (2)同名特征点的提取,为后续建立图像间的关系寻找样本点; (3)选定配准变换模型,将上一步得到的同名点信息输入到模型中,解算模型参数,建立图像间的数学变换关系; (4)完成待配准图像的坐标转换,同时在新的坐标下完成图像灰度的重采样,从而完成配准工作。其中前两步是配准中的关键步骤,直接影响到配准精度,高光谱图像波段配准问题有别于传统配准的一大特点为图像间存在灰度与对比度较大的差异,这种差异给同名点的匹配带来了困难,由于同一特征点在不同波段图像的描述会因地物与背景间的反射率差异的改变而无法匹配,因此,该文深入研究匹配策略的选择对配准精度的影响,即针对第一步参考基准的选择进行了多种方式的配准实验,对比分析出了最为适用于波段配准的匹配策略。
针对高光谱波段配准问题中存在的灰度与位置差异该文设计了两类匹配策略,分别为基于波段顺序的配准与基于拍摄顺序的配准,这两种模式分别对应研究波段配准中灰度差异与位移对配准精度的影响情况,其中对于按照波段顺序的配准方式该文又采用了单一基准与变换基准两种不同的方法进行研究,该文希望可以通过对比分析多种匹配策略的配准精度得出适用于波段配准问题的方法。首先,在按波段顺序配准的模式下对比单一基准与变换基准的配准结果,得出较好的方式,然后选择较优的配准基准的方式进行按波段顺序配准与按拍摄顺序配准两种模式的对比分析。
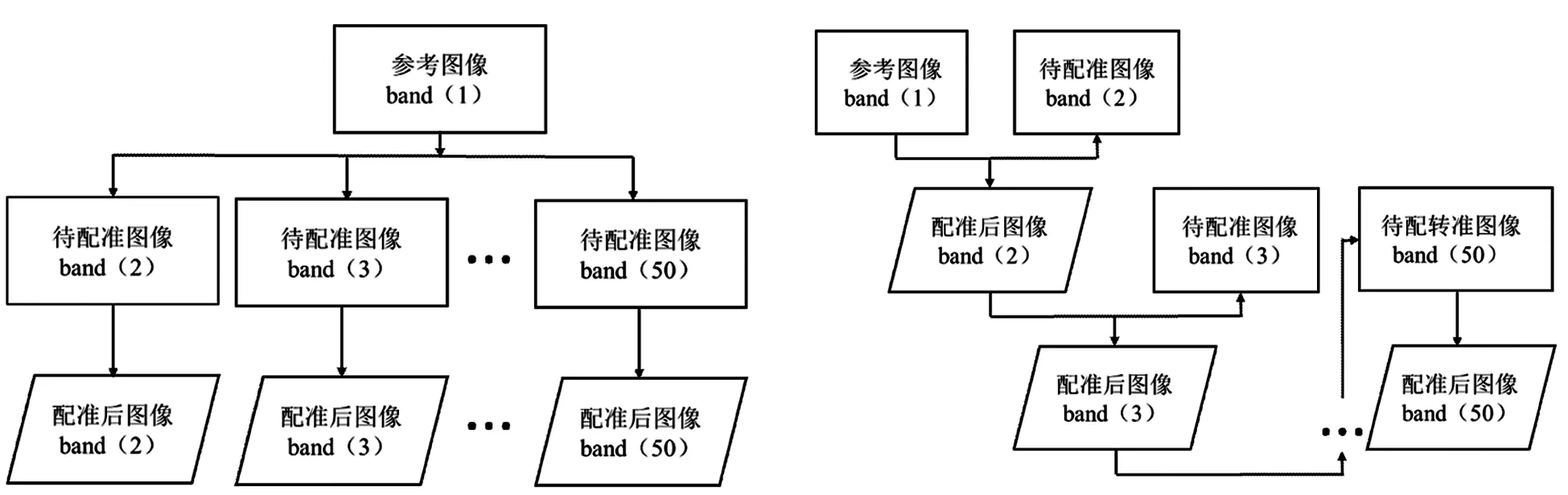
a b图2 匹配策略

图3 匹配策略
实验一为在按波段顺序配准模式下对比分析单一基准与变换基准两种不同的基准选择方式的配准性能与精度,在实验前将波段图像按照中心波长从小到大的顺序排列,在此顺序下完成配准任务。单一基准模式如图2a所示,在此匹配策略下所有波段图像均以选定的波段图像为参考图像进行同名点提取,在这种模式下进行配准实验可以保证在同名点提取合理的情况下误差最小,同时,可以讨论光谱差异对配准的影响。变换基准模式如图2b所示,配准开始时选定配准基准,待配准图像则为与其邻近的波段图像,当配准完成后,以完成配准的图像作为新参考图像完成其邻近的波段图像配准工作,参考图像不断发生变化,直到完成所有图像的配准。通过改变参考图像来减小因图像间灰度差异对配准精度造成的影响,进而研究位移对于配准精度的影响。
第二组实验在第一组实验的结论基础上完成,配准基准的选择由实验一中较优的方式完成,并采用实验一中较优方式的配准结果与按照拍摄顺序的配准模式结果进行比较分析,按照拍摄顺序模式如图3所示,需要先将50景波段图像按波段顺序进行排列,再利用已知的拍摄顺序的先验知识将50景图像分为5组,其中,第1、 12、 20、 38、 43波段图像为所在小组的第一景波段图像,将5组图像按拍摄顺序进行排列,拍摄顺序如图3所示,由于最后两组的顺序连续因此合并为一个大组,每一组按实验一中较好的基准选择的方式进行配准,第一组的基准为组内第一景图像,而第二组的参考基准为第一组配准后的最后一景图像,如此反复,直到完成五组图像的配准,即完成所有50景图像的配准。
在同名点提取方法上该文选择了SIFT算法[13],此算法在特征检测及特征描述上均具有
良好的性质,对于发生复杂形变的待配准图像有一定的应对能力,它采用的特征检测算子DoG(different of gaussians)具有较强的稳定性,可以同时兼顾重复率,定位精度,鲁棒性,高效性多方面性能的良好表现[14]; 同时,特征描述上与各种描述子相比,在仿射变化、尺度变化、旋转、模糊及光照改变等多情景下,其各方面综合表现最好,且具有良好的鲁棒性和显著性[15]。而对于错误匹配同名点的剔除,该研究采用了RANSAC算子[16],此算法在剔除误配点上具有较好的表现,是当前运用较为广泛的一种去除错误匹配的方法[17],该文采用了当前性能较为稳定、应用较为广泛的算法获取数量与质量较优的同名点,保证后续配准工作的顺利进行。
该文选择了多项式变换模型作为几何变换模型。多项式模型属于非线性变换模型,可以处理图像的局部变形,模型简单,计算速度快,可以应对一定的非线性变形,在地形平坦的图像配准上应用广泛。模型参数通过输入上一步获取的同名点信息解算获得,进而完成图像间变换模型的建立,由于不涉及三维信息,该文选择了简化的三次多项式模型。数学模型如公式(1)所示:
(1)
通过解算的三次多项式模型参数进而解算待配准图像的新坐标,并在新坐标系统下完成灰度的重采样工作,从而完成配准工作。该文采用了双线性插值方法完成采样工作。配准工作完成后,采用传统的RMSE(均方根误差)作为几何配准精度的评价指标进行精度评定。评价指标分别为飞行方向(x方向),飞行旁向(y方向)与综合方向三个方向解算的配准误差,公式分别如下:

(2)

(3)

(4)
该文主要针对高光谱波段图像间存在的灰度与位移差异问题,在匹配策略上采用单一基准与变换基准两种模式,结合传统的基于特征点配准方法进行波段配准实验,通过实验可以分析出灰度,位移对配准精度的影响,并得到适用于波段配准问题的匹配策略及配准方法。
2 实验结果及分析
利用2.1所述采集回来的数据进行配准实验,针对单景50波段图像间配准问题展开,实验均采用Matlab软件实现,平台参数为Intel Core i5-45903.30GHz PC。
2.1 单一基准与变换基准的比较分析
此节将比较分析在按照波段顺序配准的前提下单一基准与变换基准的配准情况,在单一基准方式下,以选定的波段图像为唯一基准,其余波段均与其寻找同名点建立配准几何变换模型,这种方式下会给灰度差异较大的波段图像的配准带来困难,考虑到基准波段与待配准波段图像间的差异,选择了中间位置的波段为基准来减小灰度差异带来的问题。选择了中心波长为693nm的波段图像为配准基准。在单一基准方式下,即使某一波段配准失败也不会影响后续波段图像的配准工作,且不存在误差累计问题,但稳定性难以保证; 而变换基准的模式相对而言稳定性更强,受图像间灰度差异影响小,但一旦发生失配现象,就可能会影响到后续波段的配准任务的完成,且存在一定的误差累计现象。在实际的波段配准应用中哪种方式更为合理稳定,通过实验进行了验证。表1为两种方式下的配准误差均值与标准差对比(针对配准成功的波段图像求解得到,单一基准的模式下784nm波段图像配准失败,没有计入配准误差的计算),误差均值为50景波段图像配准后每个波段图像的配准误差之和的均值,而误差的标准差则用来描述这50个波段配准误差的分布离散程度,从误差上可以看出两种模式均可以达到亚像元级配准精度,且变换基准方式下的配准精度略高于单一基准,但误差分布的稳定性较差一些。
表1 误差均值及标准差对比

误差均值标准差X方向Y方向综合X方向Y方向综合单一参考039040329505119005920052500717变换参考032170259704148008640042800903
a b图4 配准误差曲线
图4表示两种基准选择方式下50景波段图像的配准误差曲线图,其中a图表示单一基准下的误差曲线,b图为变换基准配准实验的误差曲线,图中蓝色,绿色与红色3条曲线分别代表飞行方向,飞行旁向与综合方向下的配准误差。单一基准方式下,在37波段(中心波长784nm)发配准失败,虽然,其他波段配准精度均可达亚像元级,但这种配准方式的稳定性不高,无法实现自动配准任务,波段图像间的灰度差异会使传统方法同名点的匹配不可控制,当同名点提取数量不足或分布不合理时则无法保证配准的顺利进行。而从图4b中曲线可以看出当按变换基准方式配准时,图像间灰度差异可以得到有效的解决,使配准的稳定性大大提升,精度有所提高。但从曲线的波动上可以看出在第2、 12、 20、 38、 43波段处存在较大的峰值,这些波段误差明显增大,除这几个波动较大的波段外,其他波段的误差总体比较平稳。这是由于光谱成像仪的拍摄顺序没有按照波段顺序进行,这几个波动较大的波段图像与前一景图像存在较大的姿态与位移差异,当这种差异较大时造成了配准精度的下降。因此,图像间的姿态位置差异也是造成波段配准精度下降另一大原因。此外,两误差曲线间的存在一个一致性的表现,在沿飞行方向(x方向)的误差总体要大于飞行旁向(y方向)的误差,由于航向位移要大于旁向位移,从另一方面证明了位移变大会影响配准精度。
综合误差分析结果可以看出,虽然单一基准的配准方式可以达到与变换基准近似的配准效果,都可达到亚像元级精度,但是由于图像间灰度差异的原因造成了同名点提取的准确性与稳定性下降等问题,使得单一基准匹配方法的鲁棒性不高,无法实现波段图像稳定的配准工作。因此,在波段配准的研究中应考虑使用变换基准的模式进行,以保证配准的稳定有效。通过对按波段顺序的配准误差分析,可以得出图像间的位置姿态差异会对配准结果产生影响,随着位置姿态差异变大配准精度随之下降。因此该文针对这一问题进行了研究,引入拍摄顺序到配准工作中,下节将详细对比波段顺序与拍摄顺序下配准结果的差异。
2.2 按波段顺序与按拍摄顺序的配准对比分析
由2.1中所得结论可知在波段配准问题上变换基准的配准方式较为稳定,接下来将在变换基准的方式下,分析比较按波段顺序配准与按拍摄顺序配准两种匹配策略的差异,分析将从目视效果与几何配准精度两方面进行。其中,按波段顺序配准模式的配准结果采用2.1章节中按变换基准方法所得结果。按拍摄顺序的配准模式则利用图3中的流程图完成配准,得到结果与按波段顺序模式进行比较。
首先从目视效果上对比两种方式的配准效果,如图5所示,a1与b1为未配准的波段图像的展示,a1为505nm与844nm两波段的棋盘图像,可以看出两波段图像存在较大的灰度差异,且存在较大的位移,同一景图像的不同波段图像存在较大差异,b1为844nm, 675nm, 575nm 3个波段合成的假彩色图像,可以明显看出3波段存在明显的位移差异,原始数据无法直接应用到后续研究中。a2为变换基准按波段顺序的模式下505nm波段图像与844nm波段图像配准后的棋盘图像,可以看出配准效果较好,b2为b1所示3波段图像在此模式下的配准效果,可以看出配准整体效果良好,地物清晰,纹理清楚,a3为变换基准按波段顺序的模式下a1所示两景图像配准后效果,b3 为b1所示3波段图像在此模式下的配准效果,结果也较为理想。可以看出两者的配准目视效果相近,且配准效果良好,配准稳定性也比较高,变换参考方式比较适用于高光谱图像波段配准问题。
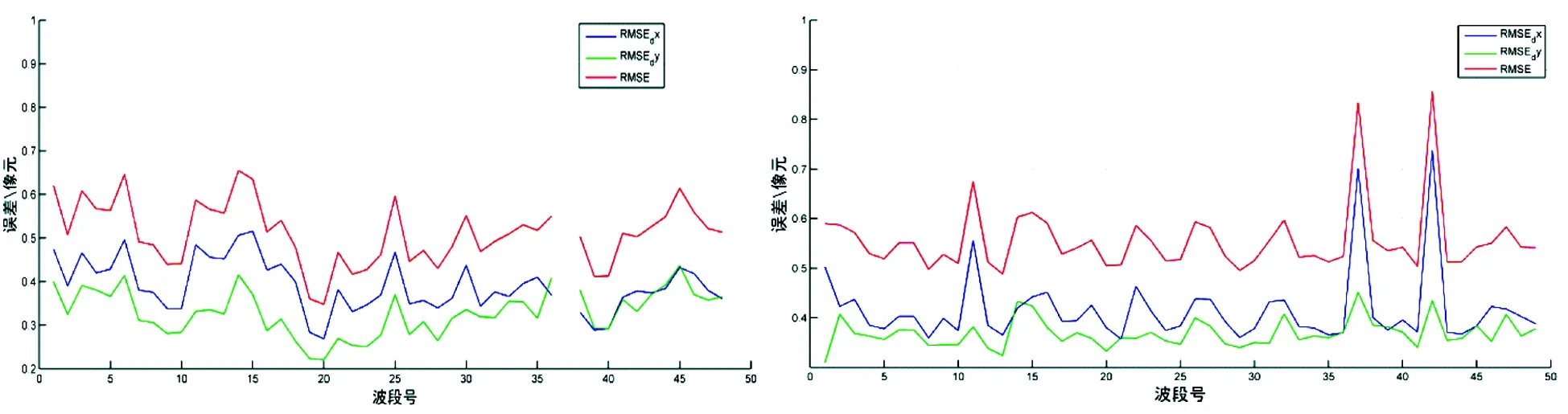
如图6所示,为两种匹配模式的误差曲线,a为按波段顺序配准的误差曲线,b为按拍摄顺序配准的误差曲线,图中蓝色,绿色与红色3条曲线分别代表飞行方向,飞行旁向与综合方向下的配准误差。对比两图可以明显看出按照拍摄顺序的误差总体比较平稳,误差没有尖锐的峰值,证明这种匹配方式可以有效地解决由于波段间位置差异较大时图像配准精度随之降低的问题。
表2 变换基准模式下两方式误差均值
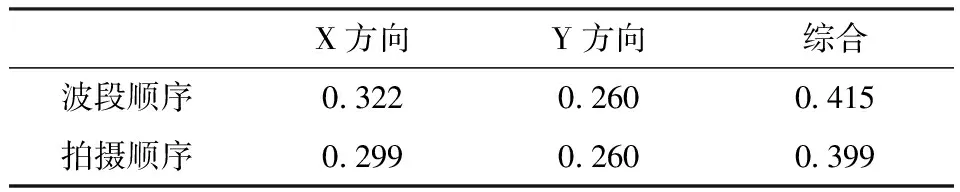
X方向Y方向综合波段顺序032202600415拍摄顺序029902600399
对两曲线在3个方向上分别求得平均值如表2所示,通过均值可以看出在x方向与综合方向,基于拍摄顺序的配准精度均高于按波段配准的方法,因此,相对于按波段顺序配准的模式而言,引入拍摄顺序可以有效地提升框幅式高光谱波段配准的精度。
综合目视效果与几何配准精度的比较分析,可以看出,按照波段顺序与按照拍摄顺序两种模式的配准均可以达到亚像元级配准精度,且目视效果良好,地物表达清晰。然而由于波段间的位置差异增大引起了按波段顺序配准方法的敏感响应,配准精度随之下降,由于变换基准的方法存在误差累计问题,这种误差突变会对后续的配准精度造成影响,而当配准时加入对拍摄顺序的考虑后可以有效地解决这一问题,相对于直接按照波段顺序配准的方法而言配准精度有所提升,因此在高光谱框幅式图像配准时考虑引入拍摄顺序可以有效的提高匹配精度。

图5 两种匹配方式下的配准效果

a b
3 总结
该文针对框幅式高光谱成像仪获取的原始图像间存在的失配问题展开,利用基于特征点的配准方法进行了波段配准的研究,通过不同的匹配策略对比分析了灰度差异与空间位置差异对配准精度的影响,通过实验一发现,单一基准的模式下虽然可以达到亚像元级的配准精度,但是由于灰度差异的影响给同名点提取带来了困难,使得这种匹配策略的鲁棒性不强,无法投入到后期的配准中去; 变换基准方法在高光谱波段配准问题上具有较好的应用效果。可以看出波段图像间的灰度差异对匹配策略的具有一定的要求,才可以完成波段配准任务,在配准是应尽量减小待配准图像间的灰度差异,以保证配准方法的稳定性。而通过实验二发现,按波段顺序的配准方法受待配准图像间的空间位置差异的影响较大,当配准的两景图像存在较大姿态位置差异时配准精度会随之下降,而在结合了拍摄顺序的匹配策略下配准取得了较好的效果。在引入拍摄顺序的配准模式下,把原图像的50个波段按拍摄顺序分为5组,组内按变换基准的方式完成配准,而组间则是根据拍摄的先后顺序依次进行配准,从实验结果上看,这种模式的配准精度要优于按波段顺序的精度,虽然这种模式需要得到相机拍摄顺序的先验知识,但在精度与稳定性上都有较好的表现,因此在进行框幅式高光谱图像的波段配准工作时,采用加入拍摄顺序的先验知识,可以有效的提高配准的精度。引入拍摄顺序的匹配策略可以消除按波段顺序配准结果中的突变误差,避免因位移差异过大造成误差精度下降的现象的发生。在变换基准的方式下引入拍摄顺序的配准方法在高光谱波段配准问题上具有明显优势,应用前景广泛。
[1] 姚云军, 秦其明,张自力,等.高光谱技术在农业遥感中的应用研究进展.农业工程学报, 2008, 24(7): 301~306
[2] 李勇志, 支晓栋,唐海龙,等.无人机遥感技术在农业中的发展与应用.安徽农业科学, 2015, 43(25): 350~351, 355
[3] Jyun-Ping Jhan,Jiann-Yeou Rau,Cho-Ying.Huang.band-to-band registration and ortho-rectification of multilens/multispectral imagery:A case study of MiniMCA-12 acquired by a fixed-wing UAS.ISPRS Journal of Photogrammetry and Remote Sensing, 2016,(114): 66~77
[4] 魏然. 基于成像机理分析的高光谱图像信息恢复研究.哈尔滨:哈尔滨工业大学.2015
[5] 王根勇, 黄磊,刘聪,等.一种微小型无人机导航装置.北京:CN104503466A. 2015-04-08
[6] Mark W.Maciejewski,Harry Z.Qui,Iulian Rujan,et al.Nonuniform sampling and spectral aliasing.Journal of Magnetic Resonance,2009,(199): 88~93
[7] 余道明. 图像配准技术研究及应用.成都:西南交通大学.2014
[8] Helge Aasen,Andreas Burkart,Andreas Bolten,et al.Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring:From camera calibration to quality assurance.ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 108: 245~259
[9] Lisa Gottesfeld Brown.A Survey of Image Registration Techniques.ACM Computing Surveys, 1992, 24(4): 325~376
[10]邵向鑫. 数字图像拼接核心算法研究.长春:吉林大学.2010
[11]贾永红. 数字图像处理(第二版).武汉:武汉大学出版社, 2010
[12]童庆禧, 张兵,郑兰芬.高光谱遥感:原理、技术与应用.北京:高等教育出版社, 2006
[13]Lowe D G.Distinctive Image Features From Scale~invariant Keypoints.International Journal of Computer Vision.,2004, 60(2): 91~110
[14]Tinne Tuytelaars,Krystian Mikolajczyk.Local Invariant Feature Detectors:A Survey.Computer Graphics and Vision, 2007, 3(3): 177~288
[15]Krystian Mikolajczyk,Cordelia Schmid.A Performance Evaluation of Local Descriptors.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(10): 1615~1630
[16]Fischler M A,Bolles R C.Random sample consensus:a paradigm for model fitting with applications to image analysis and automated cartography.Communications of the ACM, 1981, 24(6): 381~395
[17]孙凡, 何志平,戴方兴,等.无人机多光谱成像仪图像的校正及配准算法研究.红外技术, 2006, 28(4): 187~191
[18]B.Zitova′,J.Flusser.Image registration methods:a survey.Image and Vision Computing, 2003, 21(11):977~1000
[19]Maria Vakalopoulou,Konstantinos Karantzalos.Automatic Descriptor-Based Co-Registration of Frame Hyperspectral Data.Remote Sens, 2014, (6):3409~3426
[20]Li A,Zhang B.Registration Algorithm of Panchromatic and Multi-Spectral Images Based on SIFt and RANSAC.Photonics and Optoelectronics,IEEE, 2012, 1~4
[21]Sima,A.; Buckley,S.Optimizing SIFT for matching of short wave infrared and visible wavelength images.Remote Sens, 2013,(5):2037~2056
[22]朱近, 司美玲,夏德深,等.用局部灰度极值方法进行多光谱图像配准算法研究.航天返回与遥感, 2010, 31(5): 32~37
[23]夏天, 吴文斌,周清波,等.不同地域冬小麦叶片 SPAD 高光谱估算研究.中国农业资源与区划, 2014, 35(4): 49~57
[24]孙佩军, 张锦水,潘耀忠,等.基于无人机样方事后分层的作物面积估算.中国农业资源与区划, 2016, 37(2): 1~10
Vol.38,No.9,pp72-78
REGISTRATIONOFFRAMEHYPERSPECTRALIMAGESBASEDONUAV*
WangJingjing1,ShiYun1※,LiuHanhai1, 2
(1. Institute of Agricultural Resources and Regional Planning, Chinese Academy of Agricultural Sciences, Beijing 100081, China;2.Traffic Engineering College of Shandong Jiaotong University, Jinan 250023,China)
Hyperspectral imaging is a new technology for comprehensive and subtle cropland data collection and management. The UAV platform effectively surpass the traditional satellite platform in providing data for refined and quantitative research of cropland while the latter is strictly limited by orbital altitude and technological problems. On the UAV platform, frame imager is much better than traditional push broom imager, which is highly affected by platform stability and load capacity. However, registration is required before further application for band-spectral images of frame imager, which suffers from spectral and spatial discrepancy. Currently study on registration of hyper spectral data is not widely developed, due to its great spectral and contrast discrepancy. This paper developed an automatic and stable sub pixel registration method by comparing and analyzing multi band-images. And then it analyzed the impact of image gray scale and the position difference on the registration precision, designed two sets of experiment, i.e., order registration experiment and band sequence of registration. The results showed that the matching strategy can be achieved automatically and steadily under the matching strategy of the changing datum of the shooting sequence, and the registration precision can reach sub-pixel level by this method. The proposed method can take into account both the band order and the shooting order
hyper spectral technology; UAV; registration of band-image; frame image; matching strategy
10.7621/cjarrp.1005-9121.20170910
2016-11-04
王晶晶(1992—),女,北京人,硕士。研究方向:农业遥感 ※通讯作者:史云(1979—),男,江苏溧阳人,博士、研究员。研究方向:多传感器数据融合的空间信息获取及分析等的基础和应用。Email:shiyun@caas.cn *资助项目:国家重点研发计划课题“玉米生长与生产力近地面实时监测预测”(2016YFD0300602)
S12;S28;S-3
A
1005-9121[2017]09063-09
