基于Simulink轮毂电机四轮驱动外特性建模与仿真①
2017-11-22肖平李伟
肖 平 李 伟
(安徽工程大学 机械与汽车学院,安徽 芜湖 241000)
基于Simulink轮毂电机四轮驱动外特性建模与仿真①
肖 平 李 伟
(安徽工程大学 机械与汽车学院,安徽 芜湖 241000)
为了解决传统纯电动汽车续航里程低、使用效率不高的问题,对四轮轮毂驱动电动汽车进行了研究.首先,在对四轮轮毂电动汽车系统结构进行分析的基础上,基于汽车动力学原理、三元聚合物锂电池电化学原理以及电动机外特性数据等建立包含汽车运动学模型、电池模型以及电机模型的四轮驱动电动汽车整车模型.基于两种工况进行了仿真试验,结果表明所研究的四轮驱动电动汽车具有良好的工作特性.
轮毂电机,四轮驱动,电动汽车,建模与仿真
0 前言
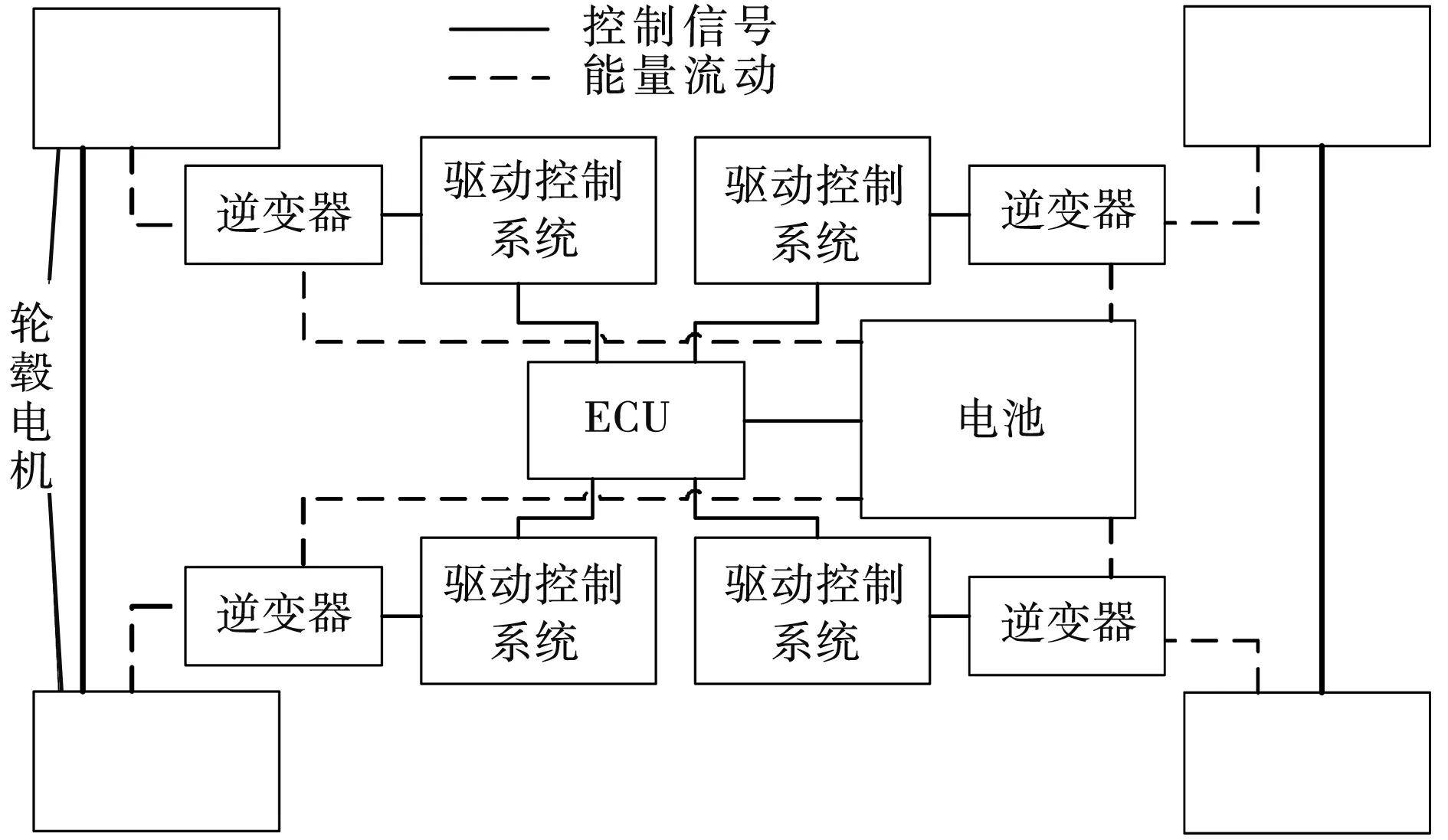
图1 四轮独立驱动汽车结构原理图
在能源危机与环境问题日益严重的今天,作为重要交通工具的汽车也受到很大影响,各大汽车公司都在寻找其他替代能源来解决能源与环境问题;电动汽车则可有效缓解能源紧张和环境污染的局面,电动汽车可分为纯电动汽车、混合动力汽车以及燃料电池汽车等.但混合动力汽车仍然需要燃烧石油因此不是最佳的结构形式、燃料电池汽车的燃料电池需要使用铂做电池材料,而这种材料在地球上储量非常有限,因此也不宜推广;纯电动汽车只有电池/电动机作为驱动系统,无需使用石油、不排放任何废气,是最理想的驱动形式.传统的纯电动汽车将发动机有电动机取代,保留变速器等传达系统,其机械结构复杂、成本高也不是最理想的纯电动汽车结构形式;而轮毂电机四轮独立驱动电动汽车将电动机与汽车车轮合为一体,将车轮的轮毂视为电机转子由电动机直接带动其旋转,大大简化了车辆的机械结构,最大特点就是将动力、传动和制动装置都整合到轮毂内,是非常理想的电动汽车结构形式.而目前关于四轮独立驱动电动汽车的研究还很少见,还有很多研究空间.本文以某四轮独立驱动电动汽车为对象,建立各系统数学模型与仿真模型[1],分别以日本1015工况和欧洲城市工况进行仿真试验.
1 系统结构及工作原理
如图1所示,本文研究的四轮独立驱动电动汽车包括电池组、ECU、驱动系统、逆变器以及轮毂电机及车身等;其中,电池为15组三元聚合物锂电池、轮毂电机由4个无刷直流电机组成、逆变器的功率管采用MOS管、驱动系统采用MOS管专用驱动IRF3205.四轮独立驱动电动汽车的工作原理是:当驾驶员踩下加速踏板时,ECU采集到该信号,并根据该信号结合轮毂电机位置信号控制驱动电路驱动逆变器使轮毂电机得到电流产生电磁转矩驱动汽车前进.
2 整车模型
2.1 动力学模型
汽车行驶时必须克服各种阻力[2],于是有
Ft=∑F,
(1)
式中Ft为驱动力;∑F为汽车所受阻力之和. 根据汽车的驱动原理可得

(2)
式中Tt为作用在车轮上的转矩,r为车轮半径.Tt为电动机经过传动系传送到车轮的转矩,本车属于轮毂电机,电动机与车轮之间为刚性连接,故可认为车轮转矩就为电机转矩.
汽车行驶阻力
∑F=Ff+Fw+Fi+Fj,
(3)
式中Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fj为加速阻力.
汽车的滚动阻力为
Ff+Wf,
(4)
式中W为车轮负载,f为滚动阻力系数,取
f=0.007 6+0.000 056ua,
(5)
式中ua为汽车前进的速度.
根据空气动力学原理可得汽车在前进时的空气阻力为
(6)
式中Cd为空气阻力系数,取0.4,A汽车为迎风面积.
汽车前进时的坡度阻力为汽车沿坡道方向的分力,则有
Fi=Gsinα,
(7)
式中G为重力加速度,α坡度.
汽车的加速阻力为

(8)

结合以上各式,可得汽车行驶方程为
(9)
2.2 电机模型
本文研究的电动汽车轮毂电机选择电机为无刷直流电机,其结构简单、低速时大功率大以及可控性好等优点.电机的功率为10 kW、最大扭矩为110 N·m、最高转速为1 500 r/min.本文采用外特性建模,对轮毂电机进行台架实验得到电机转速与转矩之间的MAP图如图2下所示.
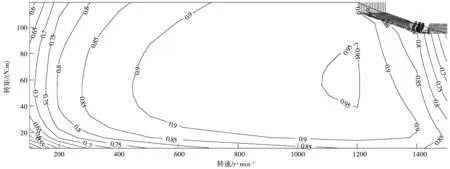
图2 电机MAP图
同时,根据汽车行驶功率平衡方程,电动汽车的功率可由式(10)计算

(10)
式中Pe为电机功率,α为爬坡度.
根据轮毂电机的工作特点,可采用式(11)计算轮毂电机转速.
(11)
基于以上原理,采用MATLAB/Simulink软件建立电机模型如图3所示.
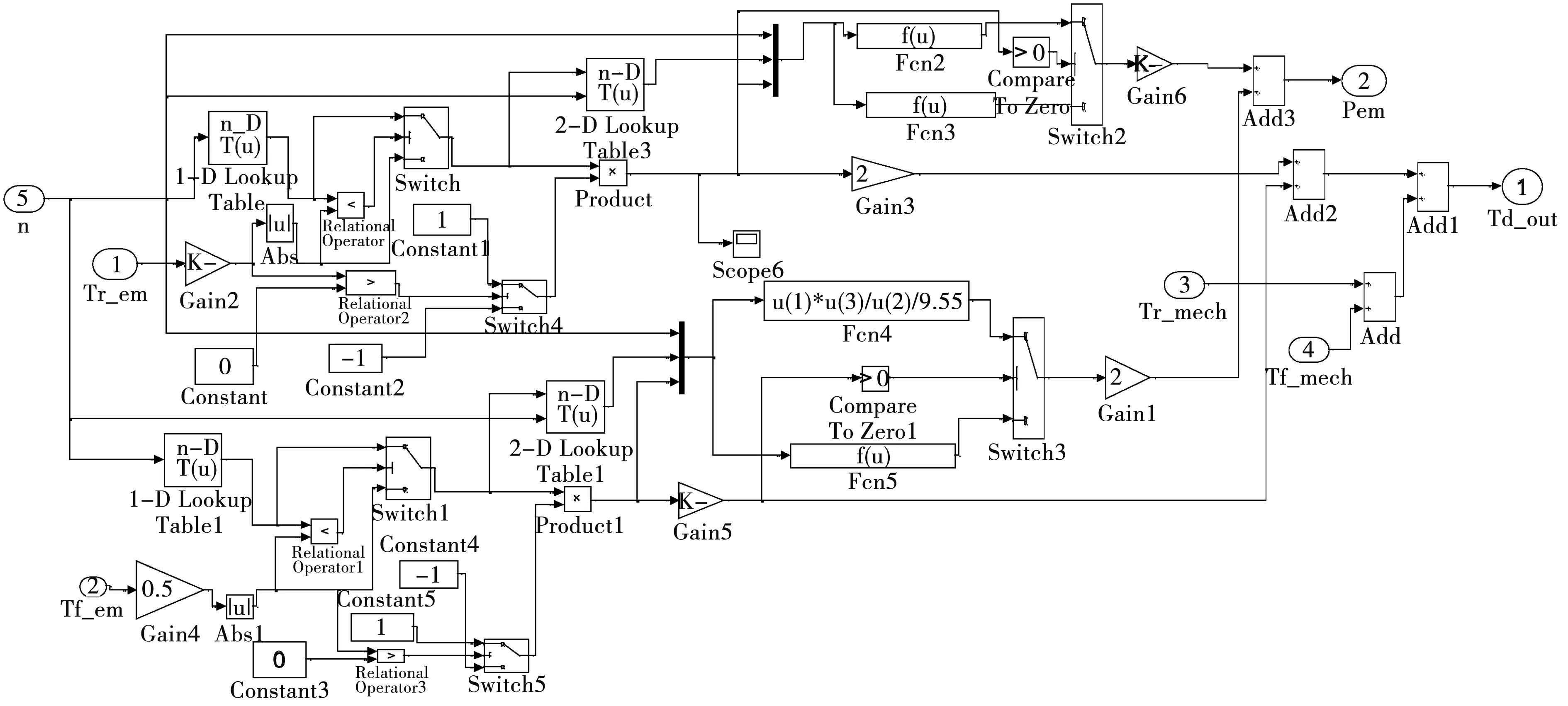
图3 电机仿真模型
如图4所示,无刷直流电机在接收转矩指令信号,首先判断所接收的转矩指令信号是否超过电机参数中的最大转矩,用Simulink中的一维查表模块执行此操作,若查表后大于电机最大转矩则用最大转矩值以替代转矩指令信号,若不超过电机最大转矩则输出当前转矩.转矩输出后结合电机当前转速,根据MAP图用二维查表模块得到电机效率;得到效率后根据驾驶员操纵指令判断电机状态是发电(能量回收)还是用电,最后得到电功率并输入电池模型中.实际输出转矩与车轮半径运算得到驱动力[3],并按照动力学公式得到汽车行驶速度.
2.3 电池模型
三元聚合物锂电池[4]的正极材料使用的是镍钴锰酸锂(Li(NiCoMn)O2),其中的镍钴锰的比例可以根据实际需要调整,三元材料做正极的电池相对于钴酸锂电池安全性高.电池荷电状态(State of charge, SOC)表征电池充电量与额定电量的比值.本文电池采用内阻模型,即将电池看成由一个理想的电压源和内置电阻组成.电池的数学模型为[5]:
电压平衡:E=U+IR. 做功平衡:EI=P+I2R. SOC计算
式中SOC0为电池初始电量,U为电池开路电压,R为电池内阻,P为电机消耗功率,Abat为电池组额定容量.本模型要求以实际功率为输入,以剩余电量为输出.电池的Simulink模型如下图所示.
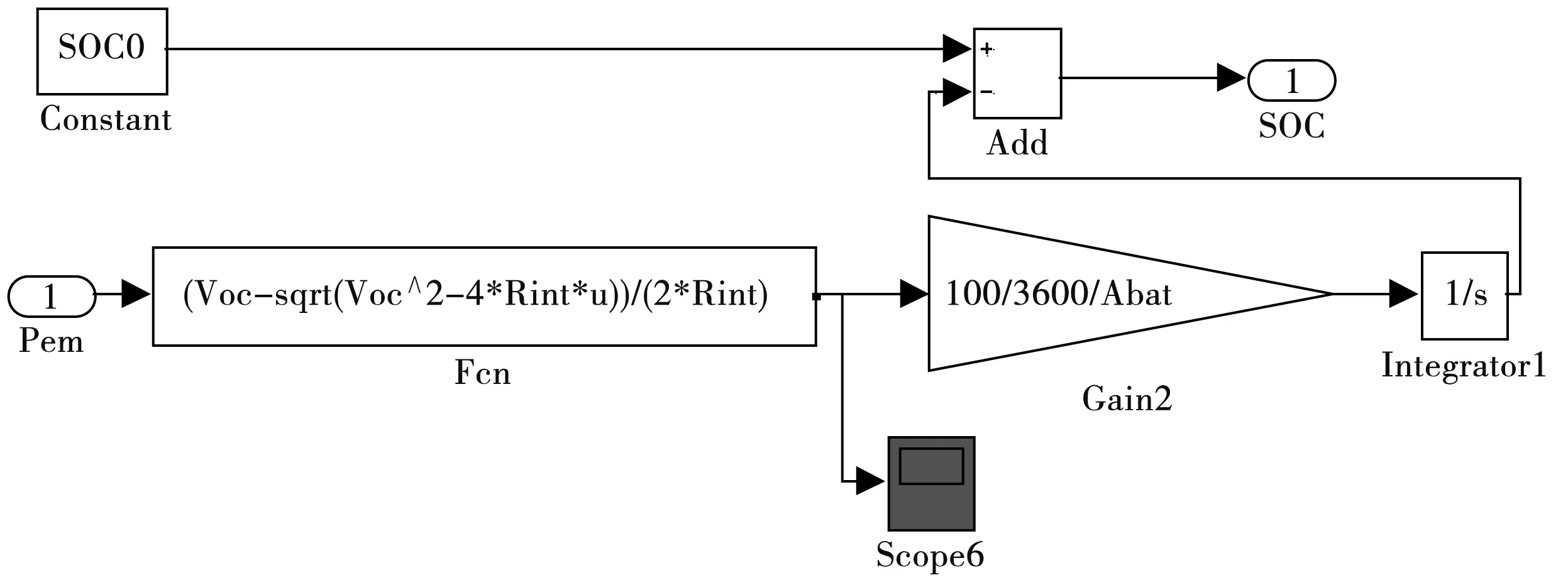
图4 电池仿真模型
3 车辆建模及仿真
3.1 整车模型
表1车辆参数
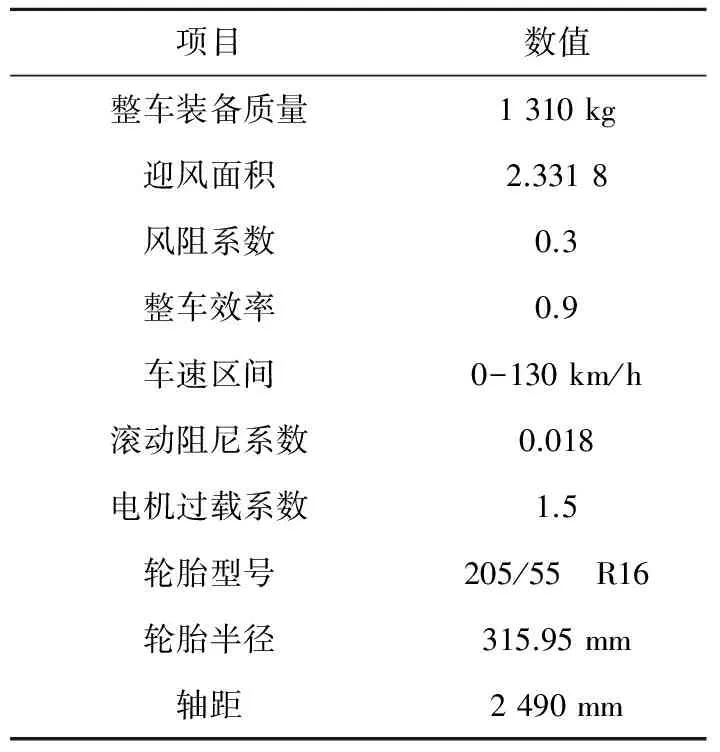
项目数值整车装备质量1310kg迎风面积2.3318风阻系数0.3整车效率0.9车速区间0-130km/h滚动阻尼系数0.018电机过载系数1.5轮胎型号205/55 R16轮胎半径315.95mm轴距2490mm
本文研究的是四轮独立驱动电动汽车,其电池电压为360 V(单体电池组电压24 V电池组数15),电机为10 kW(共4个)的无刷直流电动机,该车辆其他参数如表1所示.基于以上电机模型、电池模型、汽车运动学模型等,采用MATLAB/Simulink软件建立四轮驱动电动汽车仿真模型[6]如图5所示.
在整车模型中为了提高系统的响应速度和控制精度,对驾驶员的操纵指令采用闭环控制,控制算法采用经典的PID算法[5].在给定工况下,驾驶员按照工况要求执行加速(驱动)、减速(制动)和转弯(转向)操作.模型首先对电机电磁力(包括驱动力和制动力)进行反馈,然后根据偏差运用 PID 算法计算出达到既定工况车速所需动力,将控制信号发送给电机驱动系统,驱动系统产生相应动力矩并将其分配给四个轮毂电机经过速度转化模型输出转速和速度[7].速度转化模型如图6所示.
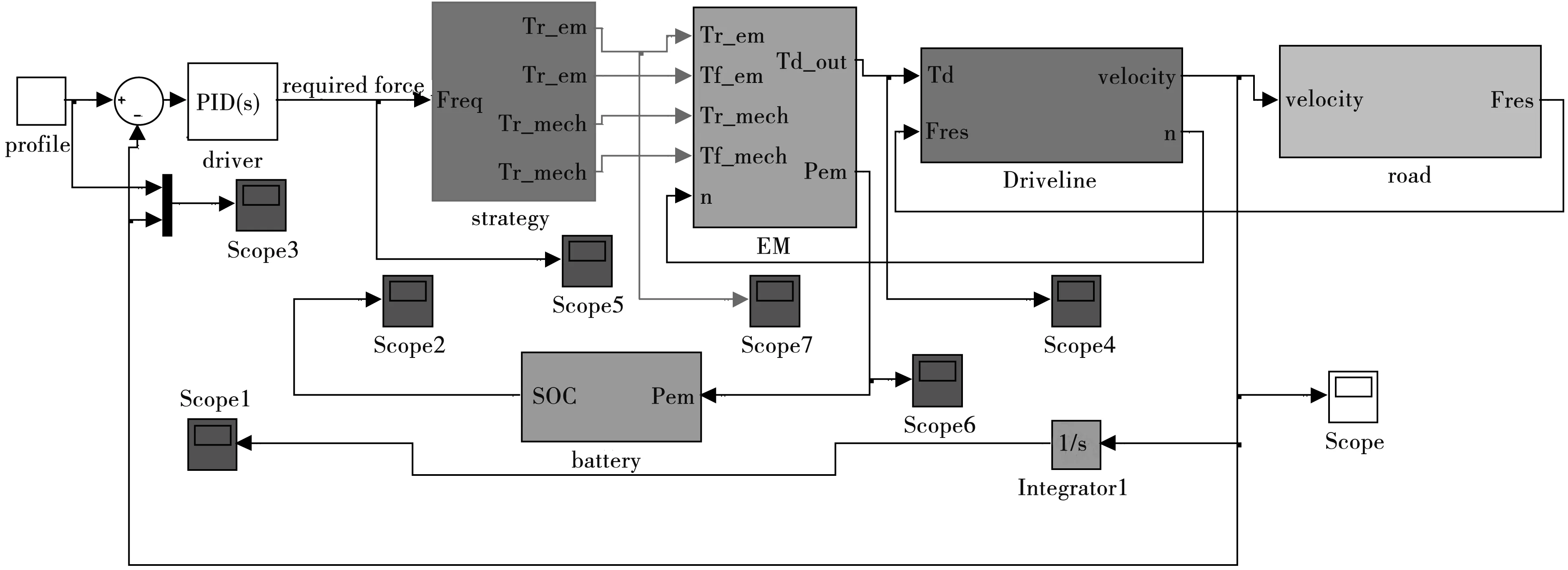
图5 整车模型
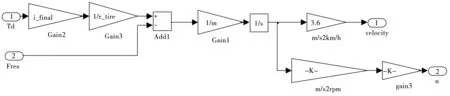
图6 速度转化模型
3.2 控制策略模型
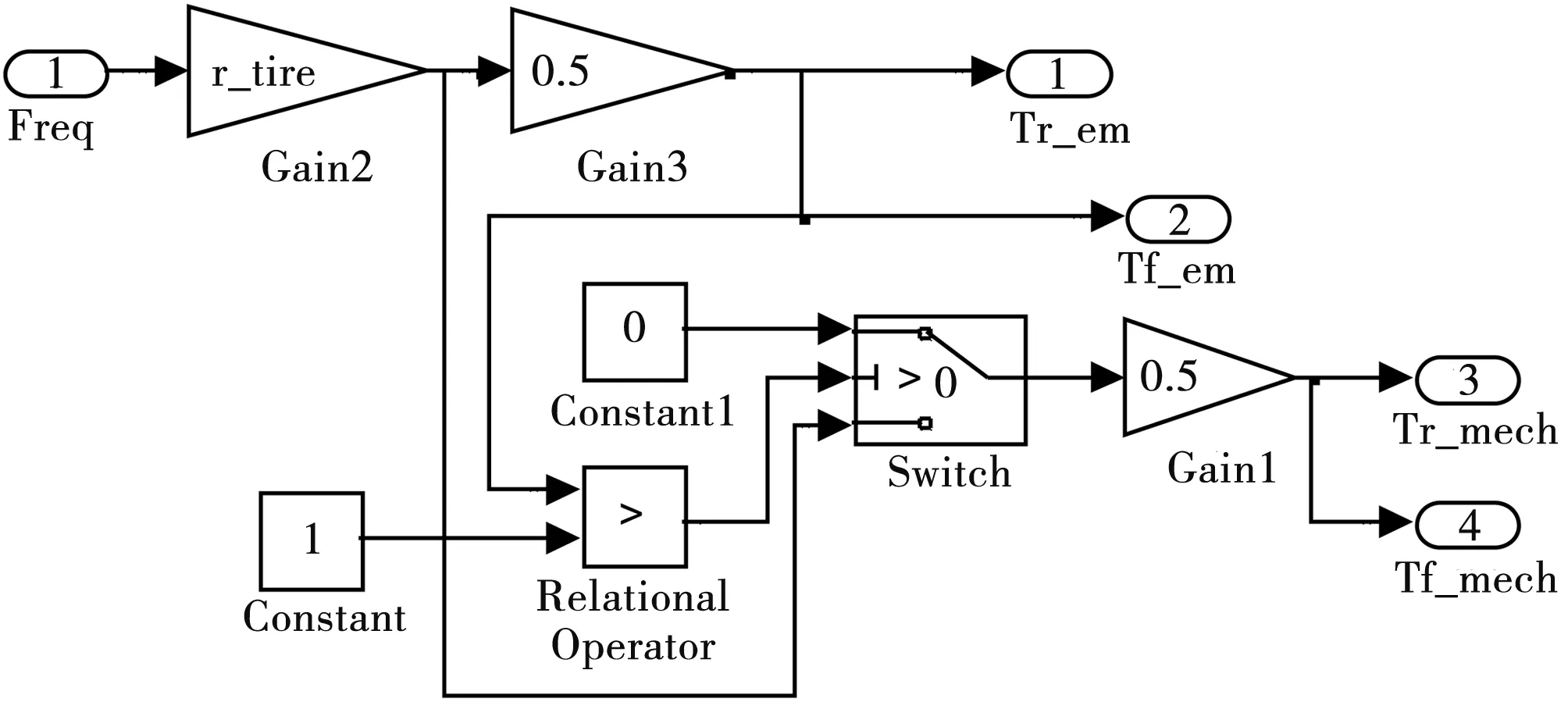
图7 控制策略模型
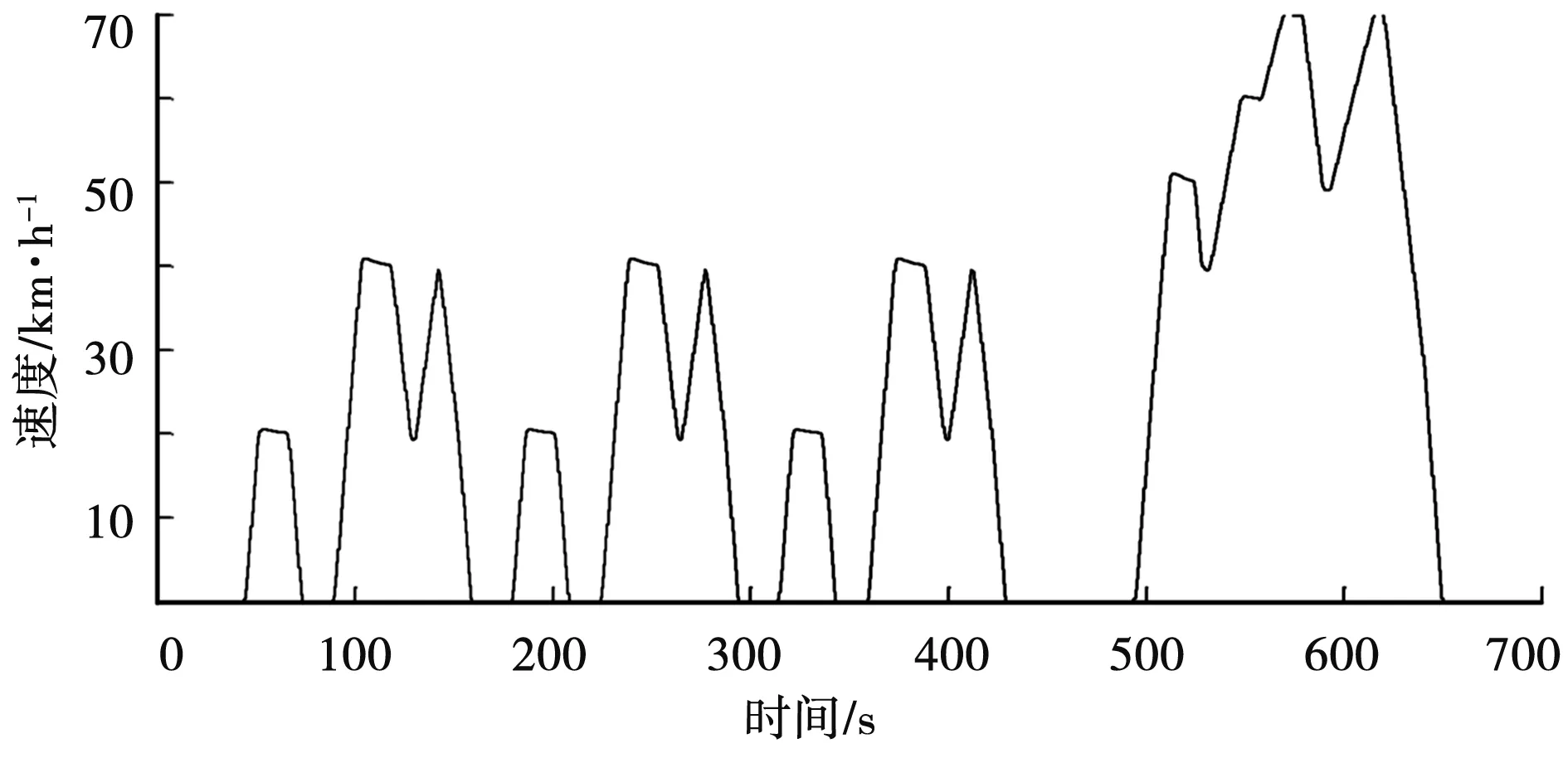
图8 CYC_1015工况

图9 CYC_1015工况仿真结果
本实验的控制策略为:系统从驾驶员控制模型中得到汽车需求驱动力,经过车轮转化成转矩,将转矩平均分配前后轴的四个车轮,这是驱动力力矩传给电机模型,系统还需要判断是否需要作出制动,其策略为先把前轴或者后轴驱动力矩与1作比较若驱动力矩小于1则认为汽车没有产生驱动力矩也即没踩油门,这时输出制动力矩给电机模块[7].其控制策略的模块如图7.
3.3 仿真及分析
3.3.1 CYC_1015仿真及结果分析.为了检验本文所研究的四轮驱动电动汽车能否正常工作,选择与我国城市道路工况相类似的CYC_1015工况作为输入进行仿真试验,该工况单次循环时间为660 s,最高时速为70 km/h,怠速时间为215 s,该工况的速度-时间曲线如图8所示,仿真结果如图9所示.
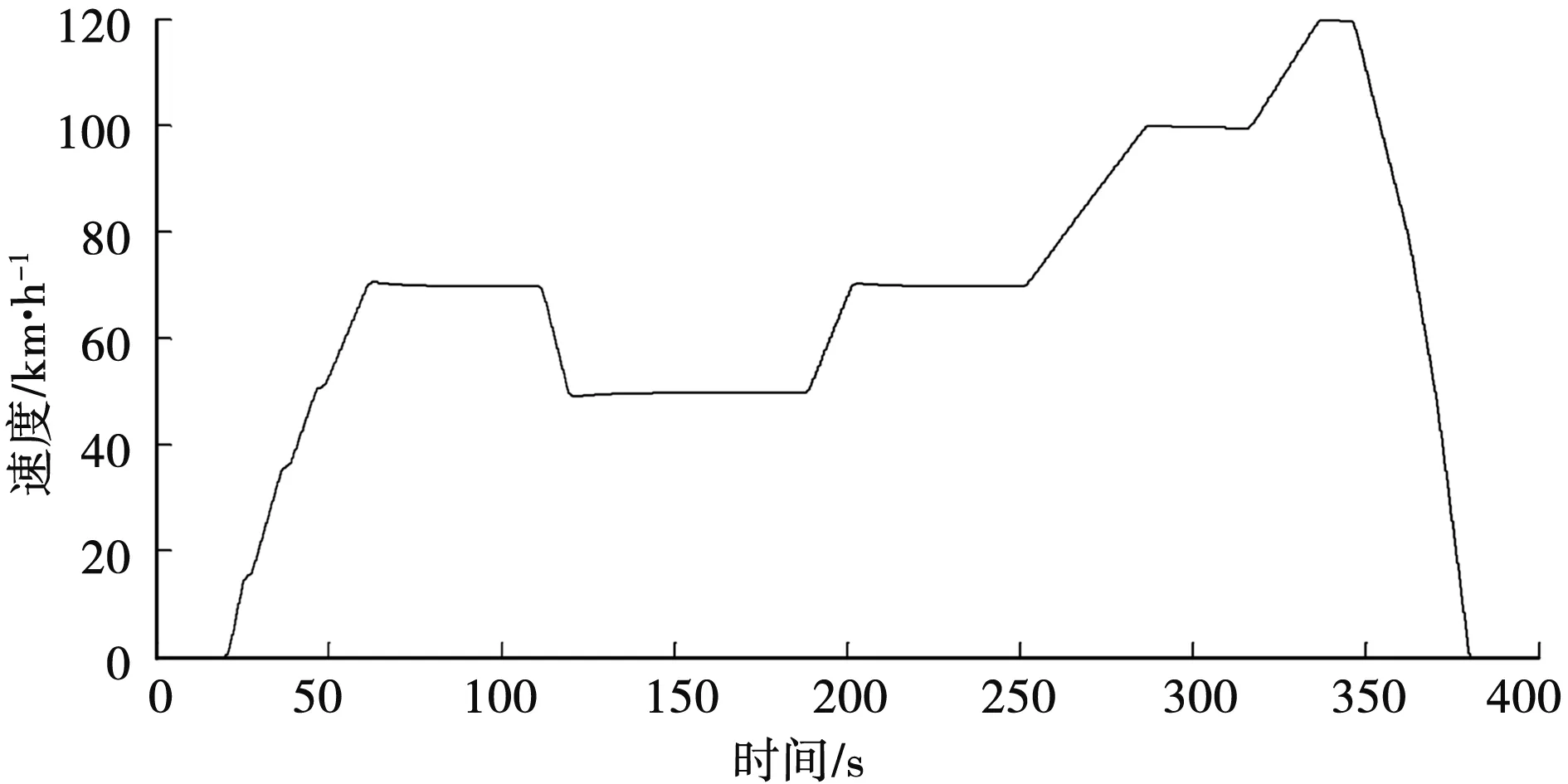
图10 EUDC工况
CYC_1015工况仿真结果如图9所示.由9(a)可以看出,在CYC_1015工况下循环10次行驶里程大约为115 km,平均车速为63 km/h,该平均速度符合我国城市道路时速不大于70 km/h的要求,说明仿真结果可信,从而也说明车辆模型建立正确.同时,从9(b)可以看出,10个工况运行结束之后电池损耗量约为29%,汽车电池消耗量合理,从图中可以看出电量消耗基本上是与时间成线性关系,所以按照当前消耗速度可以推算出电池电量完全消耗完耗时约为18 000 s,约合5 h,行驶里程可以达到315 km,基本可以应对城市行驶路况要求,也说明电池容量设置合理,电机规格选择合理;从9(c)可以看出,在仿真中,汽车的行驶速度与工况给定速度基本吻合,说明行驶速度能按照设计的速度运行,最高时速不高于80 km/h,这也进一步说明了仿真模型的正确性,同时也说明本文设计的四轮驱动电动汽车具有良好的工作特性.
3.3.2 EUDC工况仿真及结果分析.为了进一步研究本文研究的混合动力电动汽车的工作性能,以类似于我国高速公路的欧洲城郊工况(EUDC)为输入进行仿真实验,该工况单个循环时间为400秒,最高时速为120 km/h,怠速时间仅为42 s,该工况速度-时间图如图10所示.经过10次循环仿真后的仿真结果如图11(a)、(b)、(c)所示.
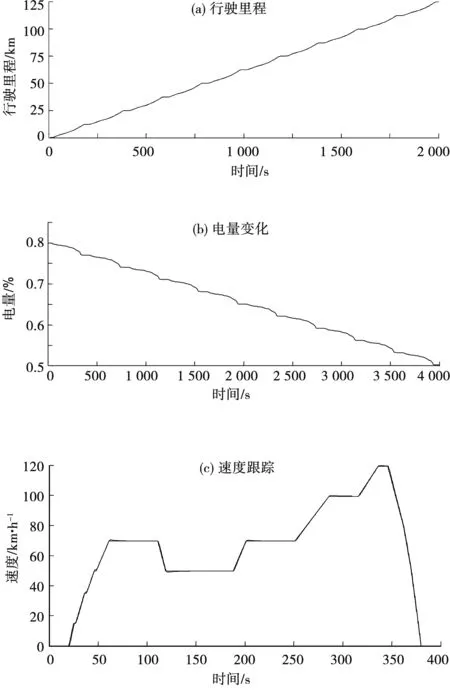
图11 EUDC工况仿真结果
在EUDC工况下历经10个循环后的行驶里程如图11(a)所示,4 000 s(1.11 h)的行驶距离为125 km,得到其时速为113 km/h,该时速符合我国高速公路时速120 km/h以下的要求,这说明仿真结果可信可靠,进一步说明了整车模型的正确性.在经历10次EUDC工况循环后的SOC如11(b)所示,10次循环后SOC下降到50%,消耗量为30%,从图中可以看出,SOC消耗量与时间总体呈正比关系,行驶里程与时间总体同样呈正比关系,可以推算出电量消耗到零的时间为10 666 s,即2.96 h,结合图11(a)中的时速可得续航里程可达到350 km,相比于现阶段电动汽车续航里程有显提高,说明电池容量与电机规格选择合理,贴合实际.仿真期间的速度追踪如图11(c)所示,仿真速度与工况速度吻合度较高,说明整车模型能够按照给定工况下速度行驶,说明控制策略可行有效也说明系统模型正确高效.
4 结论
根据新能源汽车发展现状,在传统纯电动汽车的基础上提出轮毂电机四轮独立驱动纯电动汽车[7].本文根据轮毂电机四轮独立驱动的特点,运用汽车动力学与电池相关原理,轮毂驱动电机外特性数据等,基于Matlab/Simulink搭建了四轮驱动电动汽车仿真模型模型.基于所建模型分别在CYC_1015工况和EUDC工况下进行两次仿真实验,得到车辆行驶里程、电池SOC随时间变化关系、车速等汽车动力学仿真结果,结果表明两种工况下汽车速度都能很好按照工况速度运行,说明所设计的整车模型的正确性和可行性;同时为四轮独立驱动汽车的设计与生产奠定了一定理论基础.
[1] 靳彪,张欣,彭之川,等. 四轮轮毂电机驱动电动汽车建模与仿真 [J].中国公路学报, 2016, 29(4):138-144.
[2] 张文春.汽车理论[M].5版.北京:机械工业出版社,2014.
[3] 卢东斌,欧阳明高,谷靖.四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J]. 清华大学学报:自然科学版,2012,(4):451-456.
[4] 孟庆华,许进,王东峰. 轮毂电机驱动型电动汽车动力系统研究[J].农业机械学报,2013,(8):33-37.
[5] 赵夕长,肖平.城市用电动汽车建模与仿真研究[J].北京汽车,2009(4):34-37.
[6] 李刚,李宁,段敏,等.基于Simulink的四轮轮毂电机电动汽车仿真模型开发[J].辽宁工业大学学报,2012,(06):15-189.
[7] Sakai Shin-Ichiro, Sado Hideo, Hori Yoichi. Dynamic driving/braking force distribution in electric vehicles with independently driven four wheels[J]. Electrical Engineering in Japan, 2002, 138(1): 79-89.
TheEstablishmentofExternalModelingandSimulatingforFourIn-WheelMotorDriveSystembasedonSimulink
XIAO Ping LI Wei
(Anhui Polytechnic University,Wuhu 241000,China)
In order to solve the issues about low mileage and efficiency with the traditional pure electric vehicle, The Four In-Wheel Motor Drive Electric Vehicle has been studying .Firstly, The Four-Wheel Drive Electric Vehicle Comprehensive Model is established, which includes Vehicle Kinematics, Battery and Motor Models, developed on the analysis of the four in-wheel motor electric vehicle system structure, along with the Automobile Dynamics, Lithium Terpolymer Electrochemistry and Motor External Data et cetera. The simulation on the basis of two operating conditions shows the studied four-wheel drive electric vehicle possesses fine operating characteristics.
wheel hub motor,Four-wheel drive,EV,modeling and simulation
2017-05-02
安徽省高校自然基金项目(1708085ME127)资助
李伟,E-mail:jazz672@hotmail.com.
U469
A
1672-6634(2017)03-0104-07
