波浪能装置弹性系泊系统抗台风的设计与研究
2017-11-22王文胜游亚戈盛松伟张亚群王振鹏
王文胜,游亚戈,盛松伟,张亚群,王振鹏
(1.中国科学院 广州能源研究所,广东 广州 510640; 2.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
波浪能装置弹性系泊系统抗台风的设计与研究
王文胜1,2,游亚戈1,盛松伟1,张亚群1,王振鹏1
(1.中国科学院 广州能源研究所,广东 广州 510640; 2.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
针对波浪能装置的抗台风系泊问题,以鹰式三号波浪能装置为对象开展波浪能装置的弹性系泊系统抗台风的研究与设计。根据势流理论计算装置的一阶波浪力和二阶波浪力,其中二阶波浪力采用一阶势的压力积分方法求得。在忽略系泊系统低频运动与波频运动的耦合作用下,采用准静态分析方法,将装置的运动分解为平均静力位移、波频振荡运动和低频振动的叠加。根据鹰式三号波浪能装置实现对应主浪向的要求采用分布式系泊方式分别设计了4种方案,并通过模拟计算,最终选择最优的可行性方案。结果表明:在系泊线中加入可蓄能的弹性索和沉块浮筒蓄能构建件,可以有效减小系泊载荷峰值和控制结构物漂移半径,减少系泊锚链的使用量。
波浪能装置; 系泊系统; 势流理论; 波浪力; 波频运动; 弹性索; 沉块浮筒; 鹰式装置; 系泊载荷; 漂移半径; 台风; 准静态
在海洋工程中,系泊系统的应用十分广泛,形式也多种多样。以锚定点多寡分类[1-2],可分成单点和多点系泊系统两大类;以系统的功能来分, 则有浮式生产系统、中转系统和储油系统等。这些系泊结构物在风、浪、流等环境条件的作用下可作顺应式的运动,从而导致系泊缆索(链)的张力变化。准确预估系泊结构的运动响应和系统的动力特性对海洋工程系泊系统的合理设计、保证系统的安全和正常运作有着重要的意义。
海洋工程中系泊定位系统在海洋钻井平台、大型海上浮式平台使用广泛。Pangalila在1969年采用悬链线法研究了半潜浮体的运动响应和受力分析通过实验对比[3],结果表明:系泊系统在水深较小时对浮体的影响大于水深较大时的影响,增加系泊缆索的数量可以显著降低缆索的最大受力。Kwan等在1988年对关于系泊系统动力问题对频域法和准静态进行了比较[4]。结果表明:准静态法计算精度较差但计算速度快;频域计算方法计算速度虽快但其仅仅可以计算线性问题,对于非线性问题不能采用频域方法;时域计算方法可以计算所有非线性的系泊系统动力问题,但是其计算量较大计算时间漫长。李远林在1990年对多锚链系泊浮筒系泊系统进行了时域模拟计算,研究结果表明系泊系统中加入浮筒可以有效降低系统漂移幅值[5]。
目前漂浮式波浪能装置锚泊系统的设计多参考海洋工程中船舶锚泊系统和浮式平台锚泊系统。但是本质上两者是有区别的:波浪能装置的核心是捕获波浪能从而其设计迎波面较宽且正向对浪,而船舶和浮式平台为例保持其稳定性和减小波浪阻尼都采用避浪设计,因此在波浪作用下,波浪能装置受到的波浪载荷较大并导致其锚泊系统容易遭到破坏。
针对波浪能装置锚泊系统的研究,国外的许多学者对其开展了研究。黄铭对英国波浪能装置的锚泊系统进行了综述和研究,提出波浪能锚泊系统研究的特殊性[6]。Fonseca等对波浪能装置锚泊系统进行了研究,并设计了一种高弹性合成纤维缆绳波浪能装置系泊系统[7]。2004年OPT公司采用锚系产品工业标准预测使用一种结合弹性缆和热塑性抗压元件的新型能量蓄能锚泊技术可以减少70%的最大载荷[8],2014年P hilipp R. Thies运用该项新型系泊材料系泊配置方案,与传统悬链线锚链系泊相比其锚系缆绳承受的最大载荷下降了90%[9]。
国内哈尔滨工程大学对弹性系泊系统已经开展了研究,郭小天、张亮等对100 kW潮流能发电装置系泊设计中加入了高弹性索材料[10]。计算结果显示加入高弹性索有效降低了系泊链的最大拉力和减轻系泊线的重量。中国科学院广州能源研究所主持的“南海海岛海洋能独立电力系统示范工程”项目采用了北京迪玛尔海洋技术公司所提供的“波浪能示范工程系泊系统与电缆路由设计”方案,首次对波浪能系泊系统采用了浮筒、沉块、高弹性索组合的蓄能系泊系统设计,模拟计算表明该设计有效减小了系泊缆的受力。
本文计算了鹰式波浪能装置的水动力学系数、二阶力等水动力学系数并建立系泊运动方程;同时对鹰式波浪能装置开展4种系泊设计方案并计算,进而选择最优方案。通过对比分析得出漂浮式波浪能装置弹性系泊系统的设计一般方法和抗极端波况的设计思路。
1 鹰式波浪能装置水动力学计算
1.1鹰式波浪能装置
鹰式波浪能装置是一种新颖的漂浮铰接式波浪能发电装置,其总长达36 m,型宽24 m,型深15 m,自存吃水13 m,作业状态吃水11 m。如图1所示主要由两部分组成:水下半潜驳附体和水上吸波体鹰头。鹰头与水下附体铰接而成,在波浪作用下鹰头与水下浮体产生相对运动,从而带动装置上液压缸运动将捕获的波浪能转化为液压能,最后通过液压马达驱动电机将液压能转化为电能。鹰式波浪能装置由于水下载体为半潜驳船设计,水上部分为优化的特殊鹰头造型吸波体,因此具有易于拖航上浮、维护简单、高效率等特点。

图1 鹰式三号波浪能装置模型图Fig.1 Model shape Eagle Ⅲ wave energy converter
1.2鹰式波浪能装置水动力学系数计算
1)速度势求解。
假设流体为理想流有势无旋,浮体在微幅规则波作用下作六自由度运动,入射波为规则波。
总的速度势为
Φ(x,y,z,t)=Re[φ(x,y,z)e-iωt]
(1)
从总速度势分离出时间因子,空间速度势φ可以分为入射部分φ0和扰动部分φp,其中
φ=φ0+φp
(2)

(3)
式中:A为波幅,ω为波浪频率,β为入射角,k0为波数且满足

(4)
扰动势φp可以分为7个组成部分,即
(5)
式中:υj(j=1,2,…,6)为j模态运动复振幅,φj(j=1,2,…,7)为与时间无关的空间速度势,其定解条件为
2φj=0,j=1,2,…,7, 流场内
(6)

(7)

(8)
(9)
2)波浪力计算。
一阶波浪力计算:根据线性伯努力方程且Φ取一阶势可得物体表面一阶压力p1和一阶波浪力FH分别为

(10)
(11)
式中:nk表示物体湿表面法线方向在k方向分量;sH表示物体湿表面,k=1,2,…,6;f0k为入射波k方向受力;f7k为绕射k方向受力;Tkj为浮体单位速度j模态运动k方向受到的辐射力,其表达式分别为
(12)
(13)
(14)
二阶波浪力计算:对于二阶波浪力,假设入射波是单色波,二阶力可以分为定常力与倍频的非定常项;如果入射波为多色波,则二阶力由定常项、和频项以及差频项组成,通常二阶力水平方向的二阶定常力称为波浪漂移力。完整的二阶力不仅包括一阶势的贡献还包括二阶势的贡献,由于二阶势通常计算较为复杂,计算中多采用一阶势方法[11-12]。二阶波浪力FD为

(15)
其中物面二阶压力为

(16)
1.3鹰式三号波浪能装置系泊系统计算方法
在风力、流力、波浪力作用下,系泊结构物总的运动可以认为是平均静力位移、波频振荡运动和低频振动运动3者的叠加,具体可以分为
1)平均风力、流力引起的平均静力位移x0
FC(t)+FW(t)+FM(x0,t)=0
(17)
2)一阶波浪力引起的波频振荡运动x1

(18)
3)二阶慢漂波浪力引起的低频振荡运动x2

(19)
式中:FH为流体动力载荷,FM为系泊力,FB为阻尼力,FD为波浪漂移力,FC为流产生的力,FW为风力。其表达式分别为
(20)
(21)
式中:ρa与ρω分别为空气和海水的密度,Vw和Vc分别为风速和流速,Cw与Cc分别为风力和流力系数,St,LBP和Td分别为装置受风面积、垂线间长和吃水。
波浪能装置总的运动响应为
x(t)=x0(t)+x1(t)+x2(t)
(22)
2 系泊系统方案设计
2.1系泊系统设计要求
设计浮式波浪能发电装置系泊系统的主要目的是定位波浪能装置使其在设计海域半径以内漂移,保障锚泊安全,避免系泊缆绳受力过大以致破断发生抛锚现象。设计鹰式3号波浪能装置的系泊系统应考虑:
1)对浪性:系泊系统应尽量使漂浮式波浪能装置对应系泊海域环境的主要浪向。
2)安全性:系泊系统应使装置在风、浪、流的作用下保持装置处于正常工作状态,不起锚、不断锚。
3)可靠经济:在满足系泊线设计要求下,考虑系泊材料成本、系泊系统投放施工成本,使得系泊系统可靠经济。
4)系泊半径要求:鹰式三号波浪能装置系泊海域为大万山岛近海岸,为保障系泊海域附近行驶船只和装置安全,设计系泊漂移半径为20 m以内。
2.2系泊系统环境参数
极限环境条件基于波浪能装置投放的浅水近海条件的对应的风、浪、流。设计极限标准是南中国海大万山岛近海岸处50年一遇风浪和10年一遇的流情况。详细环境参数见表1,其中风速为海平面以上10 m位置的1 h平均风速,水深28 m,海浪谱采用JONSWAP谱。

表1 环境参数
2.3系泊系统布置形式
本文中对鹰式波浪能装置采用三点系泊方式,来浪方向用两条与X方向成45°的系泊线Line 1与Line 2组成,尾锚用系泊线Line 3系泊,如图2所示。

图2 鹰式3号系泊系统布置图Fig.2 Mooring line layout of model shape Eagle Ⅲ
系泊系统采用三点系泊,每根系泊缆由海底锚链、重块锚链、悬浮锚链、浮筒以及高弹性索等组成,如图3所示。

图3 系泊线连接示意图Fig.3 Sequence of mooring line
弹性索是由一种具有超高弹性的人工合成纤维缆绳组成,其刚度曲线具有非线性的特性,可承受较大拉力和应变。弹性索在应变在达到70%时仍可以无损坏循环12 500次。如图4所示,鹰式3号波浪能装置弹性系泊系统采用的弹性索,其由240根弹性缆绳组成,通过两侧的法兰盘固定在一起,抗拉伸力可达2 881 kN,其拉力应变曲线如图5所示。
2.4系泊系统方案计算与优化
鹰式三号波浪能装置系泊系统方案设计采用由简至繁原则,分别设计了4个方案如图6~9所示。
1)全锚链方案。
方案1采用全锚链悬链线方案,锚链采用三级无档直径92 mm锚链,破断力达6 915 kN,锚链全长320 m。

图4 高弹性索示意图Fig.4 Super flex cable

图5 弹性索拉力应变曲线Fig.5 Relationship of tension and extension ration

图6 锚泊系统设计方案一Fig.6 No.1 Scheme of mooring design

图7 锚泊系统设计方案二Fig.7 No.2 Scheme of mooring design
2)沉块浮子方案
方案2采用沉块浮子系泊方案,系泊线分为五段式设计。第一段锚链长140 m,采用三级无档直径92 mm锚链;第二段为分布式重力锚链40 m,平均每米重1.325 t,共计53 t;第三段为分布重块系泊线4 m,平均每米7.5 t共计30 t;第四段锚链长8 m,采用三级无档直径92 mm锚链;第五段悬链线锚链28 m,采用三级无档直径92 mm锚链。
3)弹性索方案

图8 锚泊系统设计方案三Fig.8 No.3 Scheme of mooring design
方案3采用弹性索系泊方案,系泊线分为五段式设计。第一段锚链长40 m,采用三级无档直径64 mm锚链;第二段为分布式重力锚链40 m,平均每米重1.325 t,共计53 t;第三段为4 m三级无档直径64 mm锚链;第四段采用弹性索静态长8 m;第五段悬链线锚链28 m,采用三级无档直径64 mm锚链。
4)沉块浮子弹性索方案

图9 锚泊系统设计方案四Fig.9 No.4 Scheme of mooring design
方案4采用沉块浮子弹性索系泊方案,系泊线分为五段式设计。第一段锚链长40 m,采用三级无档直径64 mm锚链;第二段为分布式重力锚链40 m,平均每米重1.325 t共计53 t;第三段为分布重块系泊线4 m,平均每米7.5 t,共计30 t;第四段采用弹性索静态长8 m;第五段悬链线锚链28 m,采用三级无档直径64 mm锚链。4个方案系泊材料参数对比、计算结果、运动响应分别如表2~4所示。

表2 4个方案系泊参数

表3 计算结果
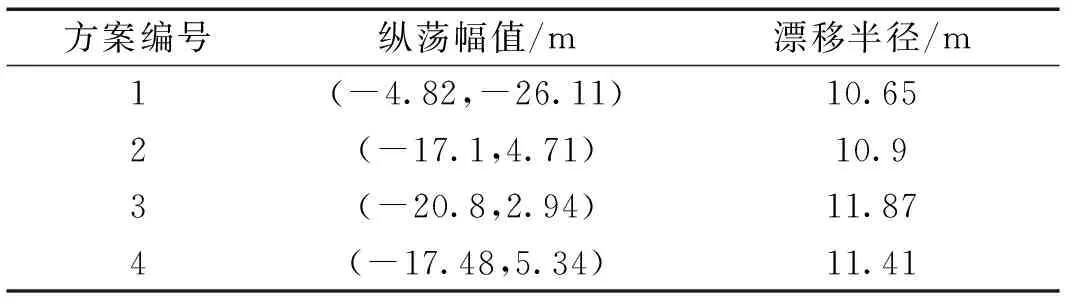
表4 运动响应
通过对比方案1~ 4和表3、4结果可以得出:
1)方案1计算结果表明:采用全长320 m悬链线系泊方案,在50年一遇台风下不发生起锚力,但系泊线轴向受力远远大于锚链破断力,不满足设计要求。由于浅水效应降低了悬链线靠自重蓄能能力,传统全锚链悬链线系泊系统用于浅水波浪能装置抗台风系泊不是最佳方案。
2)方案2计算结果表明:沉块浮子式系泊系统由于增大了系泊线蓄能能力,因此相对于全锚链系泊系统能有效降低系泊线受力。但是要达到锚链不破断需要设计更多沉块浮子,系泊线工程制造工程量较大且投放困难。
3)方案3采用弹性索系泊系统,由于弹性索较特殊的材料拉伸特性和其高容量的蓄能能力,方案3系泊线的受力大幅度降低,同时装置漂移半径增大。但是方案3弹性索悬链线式安装模式容易导致其海底磨损以及松弛状态晃动导致弹性索疲劳磨损降低使用寿命。
4)方案4采用了沉块浮子弹性索设计,由于沉块、浮子与弹性索极大增加了系泊线蓄能能力,使得系泊受力较小,保障锚链和弹性索不发生破断;另外对弹性索采用竖直预紧设计使得其避免与海床摩擦以及弹性索频繁晃动,保证了弹性索的工作安全和延长使用寿命。
3 结论
1)经过对比4种系泊方案,对于鹰式三号波浪能装置的浅水抗台风系泊方案最终优化选择方案4。方案4系泊受力较小,符合设计要求且保障了弹性索工作安全和减少了锚链使用量,为4个方案中的最优选择;
2)表3、4计算结果分析表明合理在系泊线中加入可蓄能的弹性索和沉块浮筒蓄能构建件可以有效减小系泊受力和控制结构物漂移半径。
[1] 刘应中, 缪国平,李谊乐,等.系泊系统动力分析的时域方法[J]. 上海交通大学报, 1997, 31(11): 9-14.
LIU Yingzhong, MIU Guoping, LI Yile,et al. A time domain computation method for dynamic behavior of mooring system[J]. Journal of Shanghai Jiaotong University, 1997, 31(11): 9-14.
[2] TRIANTAFYLLOU M S. Preliminary design of mooring systems[J]. Journal of ship research, 1982, 26(1): 25-35.
[3] PANGALILA F V, JOHN M J P. A method of estimating line tensions and motions of a semi-submersible based on empirical data and model basin results[J]. OTC, 1969(2): 90-96.
[4] WAN K C T, BRUEN F J. Mooring line dynamics: comparison of time domain, frequency domain and quasi-static analysis[J].OTC, 1988(2): 513-521.
[5] 李远林,吴家鸣.多锚链系泊浮筒非线性漂移运动的时域模拟[J].海洋工程, 1990, 8(1): 25-33.
LI Yuanlin, WU Jiaming. The nonlinear drift motion simulation ofmulti-chain mooring buoy in time domain[J].China ocean engineering, 1990, 8(1): 25-33.
[6] 黄铭,GEORGE A A.英国波浪发电设备及其系泊系统的研究[J].水电能源科学, 2006, 24(4): 37-40.
HUANG Ming,GEORGE A A. Research on wave energy converters and mooring systems in United Kingdom[J].Water resource and power, 2006, 24(4): 37-40.
[7] FONSECA N P, PASCOALl R, MORAIS T, et al. Design of a mooring system with synthetic ropes for the flow wave energy converter[C]//ASME 2009, International Conference on Ocean, Offshore and Arctic Engineering.Hawaii, USA, 2009: 1189-1198.
[8] MCEVOY P. Combined elastomeric and thermoplastic mooring tethers[C]//Proc of 4th Int Conf on Ocean Energy. Dublin,Ireland, 2012.
[9] THIES P R, JOHANNING L, MCEVOY P. A novel mooring tether for peak load mitigation: initial performance and service simulation testing [J]. International journal of marine energy, 2014(7): 43-56.
[10] 郭小天,张亮.潮流发电装置弹性锚泊设计[J]. 应用科技, 2013, 40(3): 6-9.
GUO Xiaotian,ZHANG Liang. The elastic mooring design of tidal current generation power device [J]. Applied science and technology, 2013, 40(3): 6-9.
[11] 戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社, 2008: 107-112.
DAI Yishan, DUAN Wenyang. Potential theory of ship motion in the wave[M].Beijing:National Defense Industry Press, 2008: 107-112.
[12] 刘应中,缪国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社, 1987: 203-204.
LIU Yingzhong, MIU Guoping. Motion theory of ship in the wave[M]. Shanghai: Shanghai Jiaotong University Press, 1987: 203-204.
本文引用格式:王文胜,游亚戈,盛松伟,等. 波浪能装置弹性系泊系统抗台风的设计与研究[J]. 哈尔滨工程大学学报, 2017, 38(10): 1505-1510.
WANG Wensheng, YOU Yage, SHENG Songwei, et al. The design and study of a wave energy converter flex mooring system in shallow water under storms[J]. Journal of Harbin Engineering University, 2017, 38(10): 1505-1510.
Studyanddesignofawaveenergyconverterflexmooringsysteminshallowwaterunderstorms
WANG Wensheng1,2, YOU Yage1, SHENG Songwei1, ZHANG Yaqun1,Wang Zhenpeng1
(1.Guangzhou Institute of Energy Conversion, Chinese Academy of Sciences, Guangzhou 510640, China; 2.School of Ship building Engineering, Harbin Engineering University, Harbin 150001, China)
To investigate the anti-typhoon mooring of a wave energy converter, the Eagle III wave energy converter was used as the object for the anti-typhoon study and design of a flexible mooring system of a wave energy converter. On the basis of potential flow theory, the first-and second-order wave forces of the converter were calculated, with the second-order wave force being obtained by the pressure integration method of the first-order potential. Neglecting the coupling of the low-frequency motion and wave frequency motion of the mooring system, the quasi-static method was adopted to decompose the motion of the unit into the superimposed mean static displacement, wave frequency oscillation, and low-frequency vibration. To make the Eagle III wave energy converter realize the corresponding requirements of the main wave direction, a distributed mooring mode was adopted to design four schemes. The optimum feasible scheme was determined through simulative calculation. Results show that adding an elastic cable that can store energy and a sinking block pontoon energy-storing structure to the mooring wire can effectively reduce the peak value of the mooring load, control the drifting radius of the structure, and reduce the consumption of the mooring chain.
wave energy converter; mooring system; potential theory; wave force; wave frequency response; superflex ropes; sinker-buoy; sharp Eagle wave energy converter; mooring load; drift radius; typhoon; quasi-static
10.11990/jheu.201605069
http://www.cnki.net/kcms/detail/23.1390.U.20170816.1445.006.html
O353.2
1006-7043(2017)10-1505-06
2016-05-19. < class="emphasis_bold">网络出版日期
日期:2017-08-16.
中国科学院战略性先导科技专项项目(XDA13040201).
王文胜(1984-), 男, 助理研究员,硕士.
王文胜,E-mail:wangws@ms.giec.ac.cn.