潜标式海洋探测仪控制系统及模块设计
2017-11-17蔡晓冬刘玉良
宗 振,蔡晓冬 ,刘玉良
(1.浙江海洋大学船舶与海洋工程学院,浙江 舟山 316022;2.浙江省近海海洋工程技术重点实验室,浙江 舟山 316000)
潜标式海洋探测仪控制系统及模块设计
宗 振1,2,蔡晓冬1,2,刘玉良1,2
(1.浙江海洋大学船舶与海洋工程学院,浙江 舟山 316022;2.浙江省近海海洋工程技术重点实验室,浙江 舟山 316000)
基于CORTEX M4内核的STM32嵌入式系统,设计并实现了用于长期监测海洋地理环境参数(温度、盐度、湿度等)的潜标式海洋探测仪,给出了主控系统及各个模块的设计方案及选型,通过合理的功能分配,可靠的硬件设计和有效的软件实现,使探测仪具备低功耗、高可靠的特点。海试实验表明,主控系统实现了对探测仪的浮力调节、能源供电及应急处置等状态控制,通过在SOFAR声道工作,完成了对深海海洋要素的实时监测。
STM32;主控系统;低功耗;实时监测
我国“十三五”期间将整合地质、海洋、测绘地理信息领域科技力量,打造深地、深海和深空为三大主攻方向,而开展海域地球深部探测,既是解决地学重大基础理论问题的需要,更是国家保证能源安全、扩展经济社会发展空间的重大需求。海洋特别是深海作为战略空间和战略资源在国家安全和发展中的战略地位日益凸显,深海-深地探测是建设海洋强国的战略需要。而实施深海探测战略,重点是要围绕“进入深海-认知深海-探查深海-开发深海”主线,突破制约深海探测能力的核心关键技术,进军深海科学和技术制高点。
目前主要的地球物理手段和设备是多波束、重磁、海底地震等,对于全区域、大范围的海底以下的深部构造有效的探测手段不多,只有法国尼斯大学和美国普林斯顿大学等极少数科研单位掌握这方面的技术和研发能力。为实现科学研究目标和工作需要,我们开发了潜标式海洋探测仪,用于海洋地理环境、温度、盐度、湿度等数据的长期监测,平时可以潜在SOFAR(800~1 200 m)声道工作,该仪器不同于传统的固定式陆地探测台站和坐底式海底探测仪,而是漂浮在海水一定深度(工作水深0~1 200 m,设计最大水深3 000 m),并随着洋流作浮游运动,这样可以准实时、大范围、长时间记录不同地点传来的信号。
1 载体系统组成
潜标式海洋探测仪本体系统由观测模块、能源模块、浮力调节模块、中央控制系统模块和应急单元模块五部分组成。水听器是观测模块的主要部分,采用带宽为0.05~0.5 Hz的甚低频水听器,可实现大深度长时间记录地震传达的信息,而且可以记录不同地点接收到的信号,同时预留其他观测传感器接口,可形成多功能海洋探测仪;能源模块为其他各模块提供电源,采用模块化设计,可最大限度地利用安装空间,提高电池组的安全性,并延长电池的使用寿命;浮力调节模块通过改变海洋探测仪的排水体积来改变浮力,从而实现定时/自主上浮和下潜;中央控制单元负责海洋探测仪的升沉控制、设备管理、数据收发与存储等工作,主要包括低功耗微处理器、载体状态传感器、辅助硬件电路和底层控制软件等;应急单元是相对独立的模块,主要负责监控载体控制单元的健康状态、执行抛载动作等工作。
2 总体技术
为了能够适应复杂的海洋环境和不同的任务需求,保证潜标式海洋探测仪能安全、可靠、长期地工作,拟通过系统集成及实现技术,把传感器模块、通信与定位模块、能源模块、浮力调节模块、低功耗智能控制模块等五个模块有机集成在一起,同时设计安全监测功能和应急抛载功能。系统总体结构如图1所示,体系结构如图2所示。
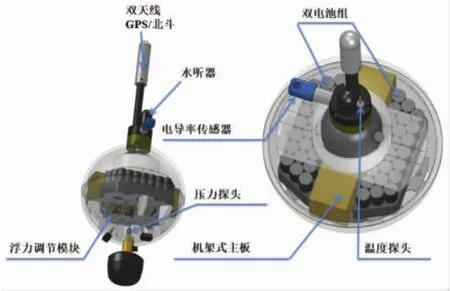
图1 潜标式海洋探测仪的总体结构
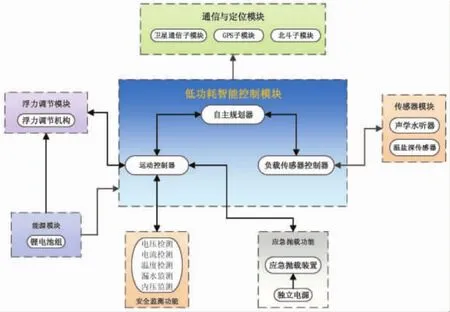
图2 潜标式海洋探测仪的体系结构
潜标式海洋探测仪可根据要求切换工作模式,既可潜在SOFAR信道层漫游做海洋监测工作,又可根据需要做水文的剖面观测。潜标式海洋探测仪总体结构设计时,主要考虑的因素有:最大程度地发挥各种装置和仪器的技术性能,布置紧凑,充分利用潜标式海洋探测仪的各部分容积,保证各装置和仪器便于安装,又避免相互干扰和影响;控制能力强,便于改变工作模式和协同组网工作;能源模块能提供充足的电量,以提高仪器在海洋中工作的持久性;安全可靠,有较强的自救能力和应急措施。
3 低功耗中央控制系统
潜标式海洋探测仪的控制模块设计图如图3所示,中央控制模块控制着其它4个模块:传感器模块、通信与定位模块、能源模块、浮力调节模块。同时控制安全监测功能和应急抛载功能。除了接收甚低频水听器信号之外,还可接入温盐深等传感器信号,可在线分析信号,也能存在SD卡和内存中,通过串口与网口输出数据。为了尽可能低功耗,除了选择低功耗芯片等器件外,细化中断功能,开启睡眠功能,尽可能降低功耗开支,确保海上足够的值守自持能力。
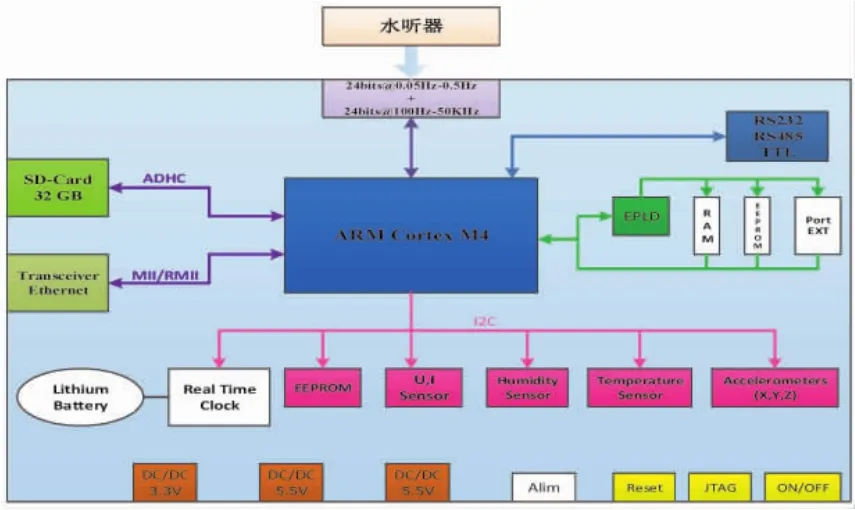
图3 低功耗智能控制模块
海洋探测仪控制单元采用ARM Cortex M4处理器,该处理器是基于一个支持实施仿真和嵌入式跟踪的32位CPU。与通常采用的PC104嵌入式处理器相比,ARM Cortex M4处理器的功耗要低超过2个数量级。为了提供系统可靠性,选用ARM Cortex M4成熟工控板作为核心控制板。
海洋探测仪中央控制单元的软件部分将基于μC OS-II嵌入式多任务操作系统开发,实现海洋探测仪的浮力调节、数据采集与存储、信息传输、状态监测及其他模块之间的通信等功能,如图4所示。
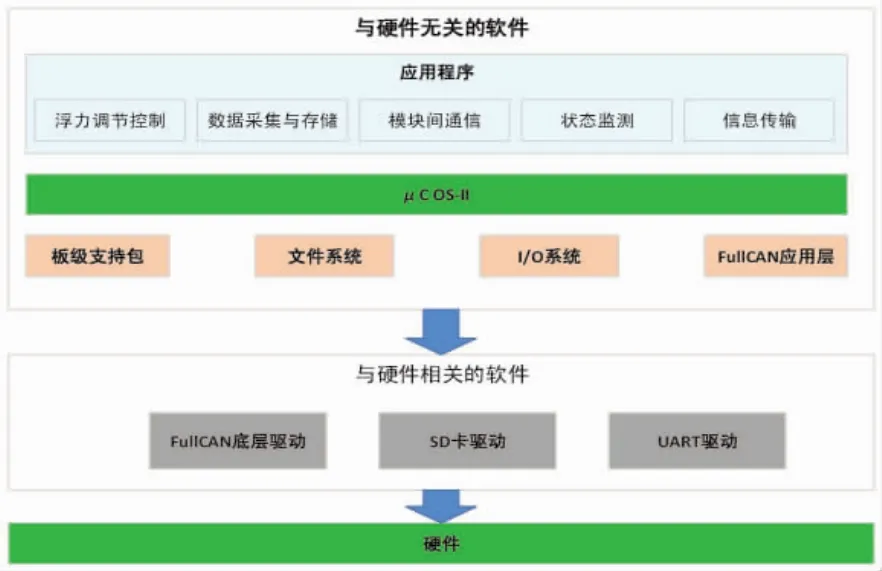
图4 中央控制模块软件结构图
4 其他模块选型及设计
浮力调节模块设计图如图5所示,采用低功耗的液压式油囊浮力调节装置实现潜标式海洋探测仪自动升沉。潜标式海洋探测仪需要下沉时,控制模块控制电源模块给减速电机正向供电,减速电机转动,同时驱动滚珠丝杆螺旋转动,滚珠丝杆的轴向运动驱动活塞在缸体内滑动,将油气囊里的液压油吸入缸体,减小潜标式海洋探测仪的体积和浮力,当重力超过浮力时,潜标式海洋探测仪则会自动下沉,达到一定深度后,即当重力和浮力重新平衡后,潜标式海洋探测仪会停止下沉,并始终保持在该深度(等密度面)上漂移。反之,潜标式海洋探测仪需要上升时,控制模块控制电源模块给减速电机反向供电,将缸体里的液压油推入油气囊,增加地震仪的体积和浮力,地震仪上升到离海面一定的深度时,重力和浮力重新达到平衡,于是潜标式海洋探测仪又会停止在该深度上漂移。

图5 浮力调节模块
通信系统要解决海洋探测仪与监控中心的通信链路问题,采用现有成熟技术,重点解决天线的封装材料选择、安装结构设计和试验验证等研究工作。设计采用无线电和铱星两种通信方式,前者用于调试阶段,后者用于正式作业阶段。
无线电台采用美国Maxstream公司的9Xtend OEM无线通讯模块(如图6所示),该通讯模块具有较高的接收灵敏度、可靠的数据链、传输距离远等特点。海洋探测仪载体上安装的无线电通讯天线为小型小增益天线,增益为2.1 dB;支持母船上安装的天线为高增益天线,增益为10 dB,且可以安装在母船的较高位置处,改善无线电通讯效果。

图6 9Xtend OEM无线通讯模块
卫星通信主要特点是不受通信距离限制,但是通信费用高,数据传输速率低。目前能够提供卫星通信的有多家单位,国内有北斗系统,国外有铱星系统、ORBCOMM系统、全球星系统等。北斗系统的发射模块相对较大,功耗大,通信速率低,每次最多能发送120 bit,发送间隔60 s,并且服务区域有限;国外的商业卫星通信系统从数据终端、通信资费、通信速率、覆盖范围综合考虑,铱星系统具备较高性价比。铱星9523模块具备短报文发送、点对点拨号实时传输功能,同时可集成GPS定位功能。海洋探测仪系统利用9523数据通信模块,采用点对点实时通信,同时北斗卫星作为备用系统。

图7 部分国内外卫星通信模块
根据海洋探测仪内部空间结构的特点,电源模块的设计最大限度地利用安装空间。为提高电池模块的安全性,并延长电池的使用寿命,在电池组外围加装安全保护和存储电路。集成后的电池组由控制系统的电源管理模块对其进行管理,依据潜标式海洋探测仪的工作流程,可分时、分段对不同电池组分别进行管理,使其既能稳定工作,又能保证工作过程中有足够的功耗,维持较长的使用寿命。单组锂亚硫酰氯电池组的设计图如图8所示,探测仪安装两组电池组。
图8 锂亚硫酰氯电池组
海洋探测仪的应急处理系统包括应急处理控制单元和抛载装置。应急处理系统采用独立的能源供给,应急处理控制单元通过串口与主控单元连接,并监测主控单元处理器的运行状态,应急处理单元通过开关量控制抛载装置,图9为海洋探测仪应急处理单元原理图。当应急处理控制单元接到主控单元发来的异常处理指令或者监测到主控单元出现异常,应急处理控制单元立即执行抛载动作。
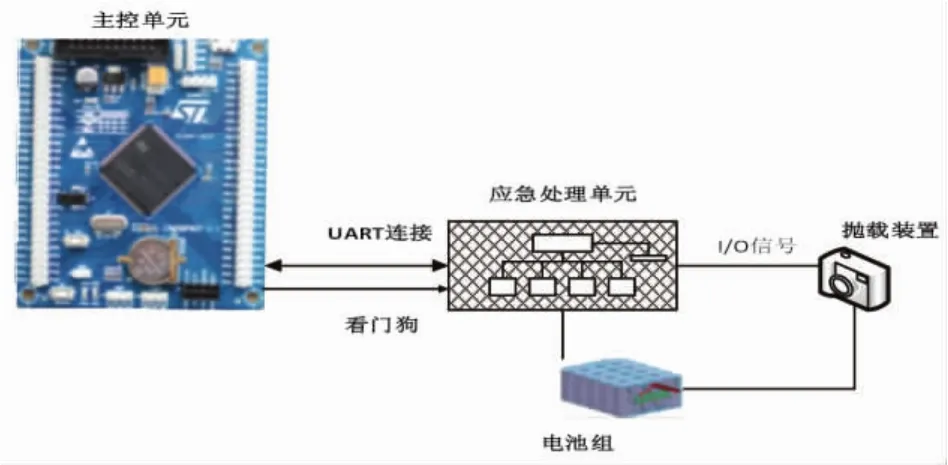
图9 应急处理单元原理图
5 系统软件实现
中央控制系统软件部分采用C语言进行编写,编译环境为KEIL UVISION 5,在软件实现方面,本系统采用基于ARMCortexM4内核的STM32F4ZGT6芯片,该芯片拥有144引脚,1MBFLASH,196KBSRAM,板载模块多,接口丰富,具有功能齐全的库函数,因此在USART通信、AD转换、SPI等软件接口均可直接调用库函数,经过简单的配置就可实现软件功能。
6 试验结果
试验结果表明,海洋探测仪可以长时间潜在SOFAR(800~1 200 m)声道工作,并随着洋流作浮游运动,满足潜标平台工作水深指标。在中央控制系统的作用下,观测模块、能源模块、浮力调节模块、应急单元模块均能正常工作,未出现故障,整个潜标式海洋探测仪可有效进行海洋数据监测,满足深海探测系统的设计需求。
7 结束语
随着我国海洋科研的飞速发展,海洋探测技术广泛应用于海洋资源开发与利用、海洋地震与地貌监测等方面。海洋探测仪今后将不仅仅局限于近海和大洋观测,还将在海洋、气象、气候、海军、石油、航运等行业发挥重要的作用。
[1]赵航芳,汪非易,朱小华,等.海洋声学层析研究现状与展望[J].海洋技术学报,2015,34(3):69-73.
[2]Xilinx.Spartan-3 FPGAFamilydatadheet[M].2005.
[3]刘素花,龚德俊,等.基于单片机的海洋环境监测系统的控制电路设计[J].海洋科学,2009(8):67-71.
[4]邓云,姜飞,等.实时传输潜标平台中的深海海流观测系统设计[J].气象水文海洋仪器,2012,12:69-72.
[5]蒋平,喻剑.深海垂直剖面实时监测潜标系统[J].海峡科技与产业,2017(02):82-83.
[6]朱海,葛德宏,陈建华,等.深海潜标多螺旋桨推力姿态控制仿真[J].舰船科学技术,2016(07):7-11.
[7]韩建军,张国军,张文栋,等.MEMS矢量水听器用于潜标系统的可行性(英文)[J].强激光与粒子束,2016(06):19-23.
[8]曾景贤,蒋国军,夏铁坚.声层析潜标主控模块设计与实现[J].声学与电子工程,2016(02):33-35.
[9]王琦,吕云飞,兰华林,等.双矢量潜标被动定位方法研究[J].声学技术,2016(03):208-213.
[10]葛德宏,朱海,高大远,等.深海潜标布放运动与定深控制策略研究[J].舰船科学技术,2016(13):87-90.
[11]宋磊,胡金华,张卫,等.新型潜标系统综合保障体系架构设计[J].舰船电子工程,2016(08):1-4+183.
Design of the Control System and Module for Submersible Marine Detectors
ZONG Zhen1,2,CAI Xiao-dong1,2,LIU Yu-liang1,2
1.School of Naval Architecture and Ocean Engineering,Zhejiang Ocean University,Zhoushan 316022,Zhejiang Province,China;
2.Key Laboratory of Offshore Engineering and Technology of Zhejiang Province,Zhoushan 31602200,Zhejiang Province,China
Based on the STM32 embedded system with CORTEX M4 core,this paper designs and implements long-term monitoring of marine geography environment parameters(temperature,salinity,humidity,etc.)through submersible marine detectors.This paper gives the design scheme and selected type of the main control system and each module is given and selection.Through a reasonable function distribution,reliable hardware design and effective software,the new-type submersible marine detectors are developed with low power consumption and high reliability characteristics.The sea test experiment shows that the main control system has realized effective control of the buoyancy,as well as energy supply and emergency disposal of the detectors,and has completed real-time monitoring of the ocean parameters by working in the SOFAR channel.
STM32;master control system;low power consumption;real-time monitoring
P716
A
1003-2029(2017)05-0022-05
10.3969/j.issn.1003-2029.2017.05.004
2017-06-13
浙江省公益性项目资助(2015C31072);滨海区科技计划资助项目(2015C3101)
宗振(1993-),男,硕士,主要研究方向为水声工程。E-mail:1329160162@qq.com
